



Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road

Abstract
:1. Introduction
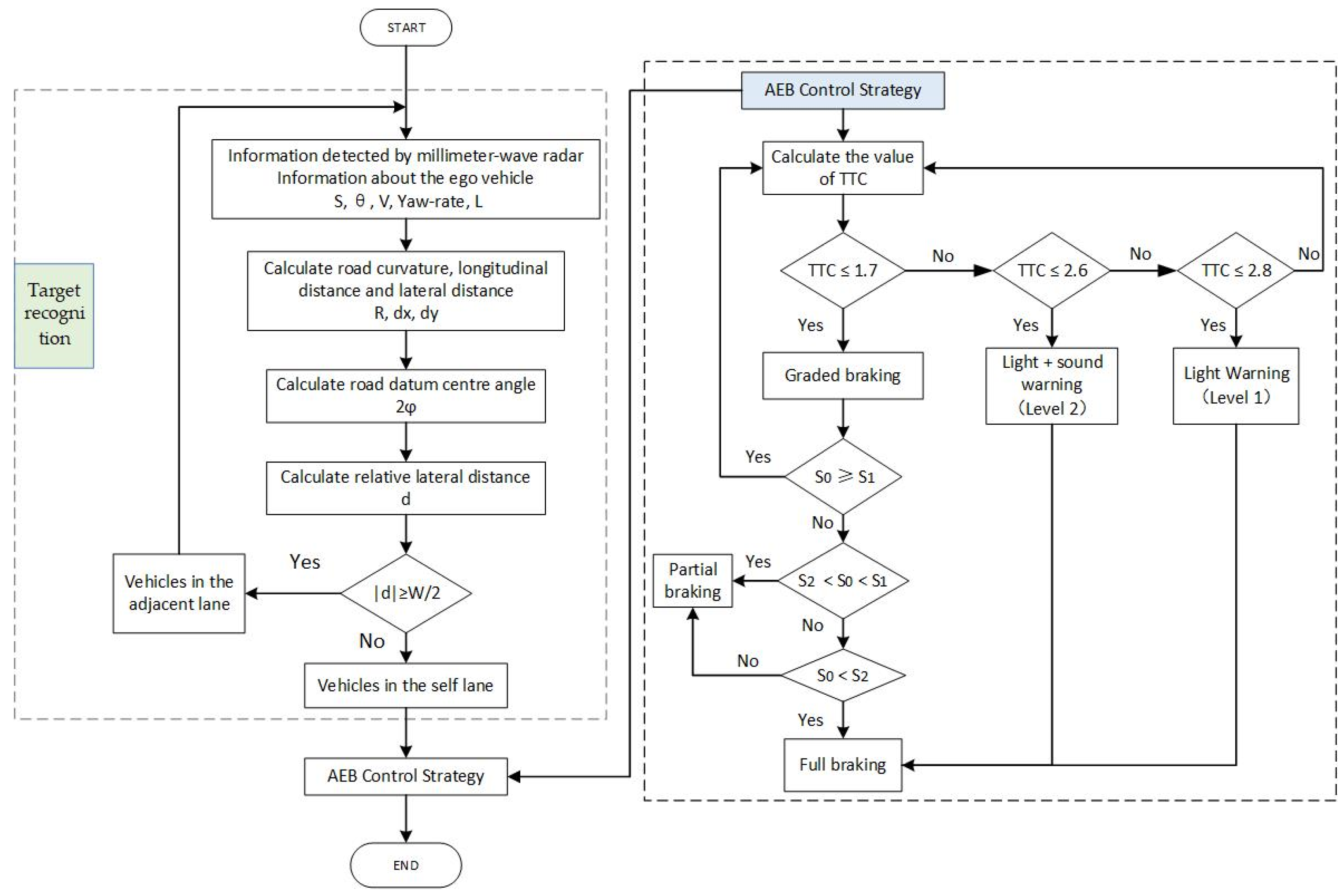
2. Target Recognition on Curved Roads
2.1. Radar Information Preprocessing
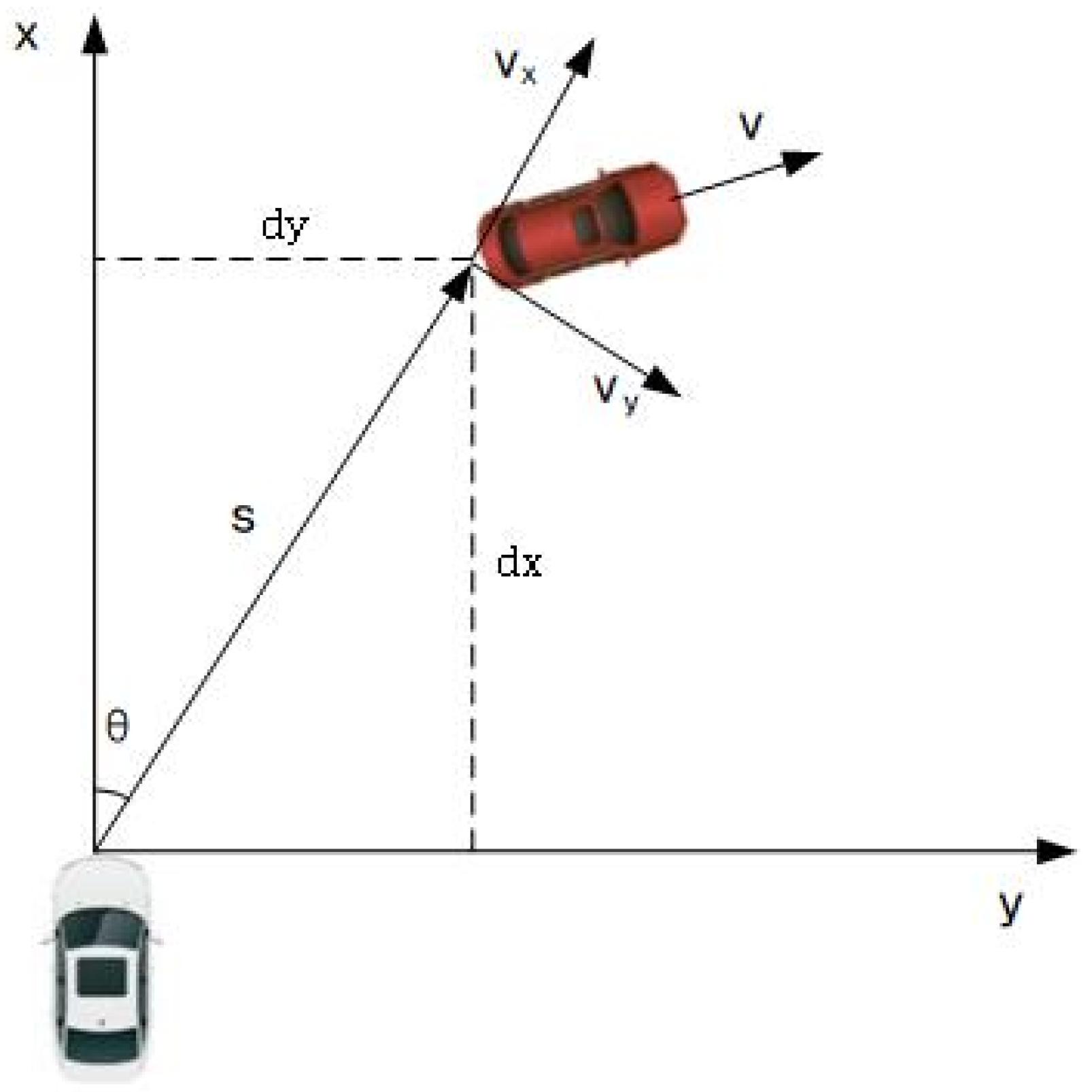
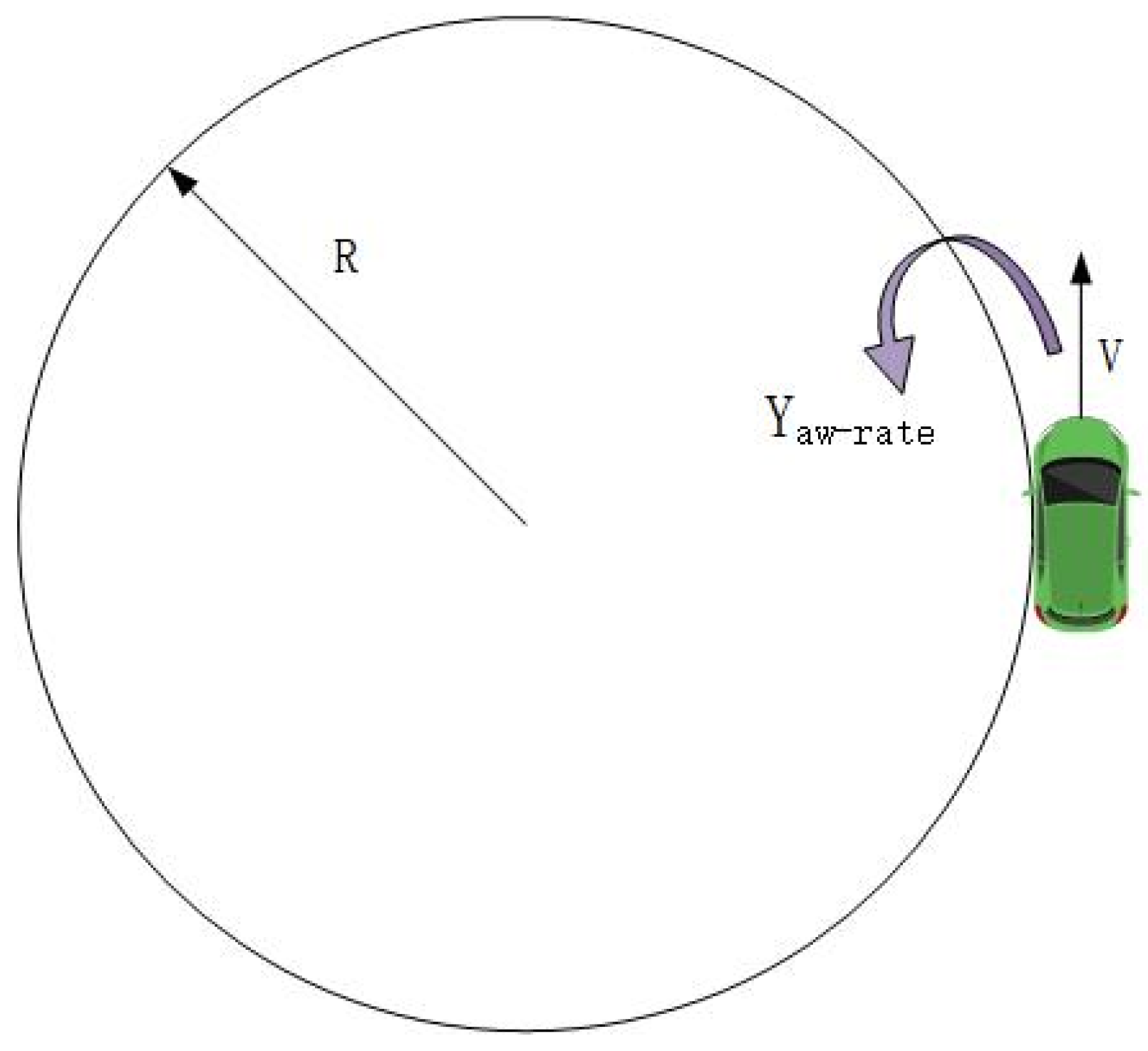
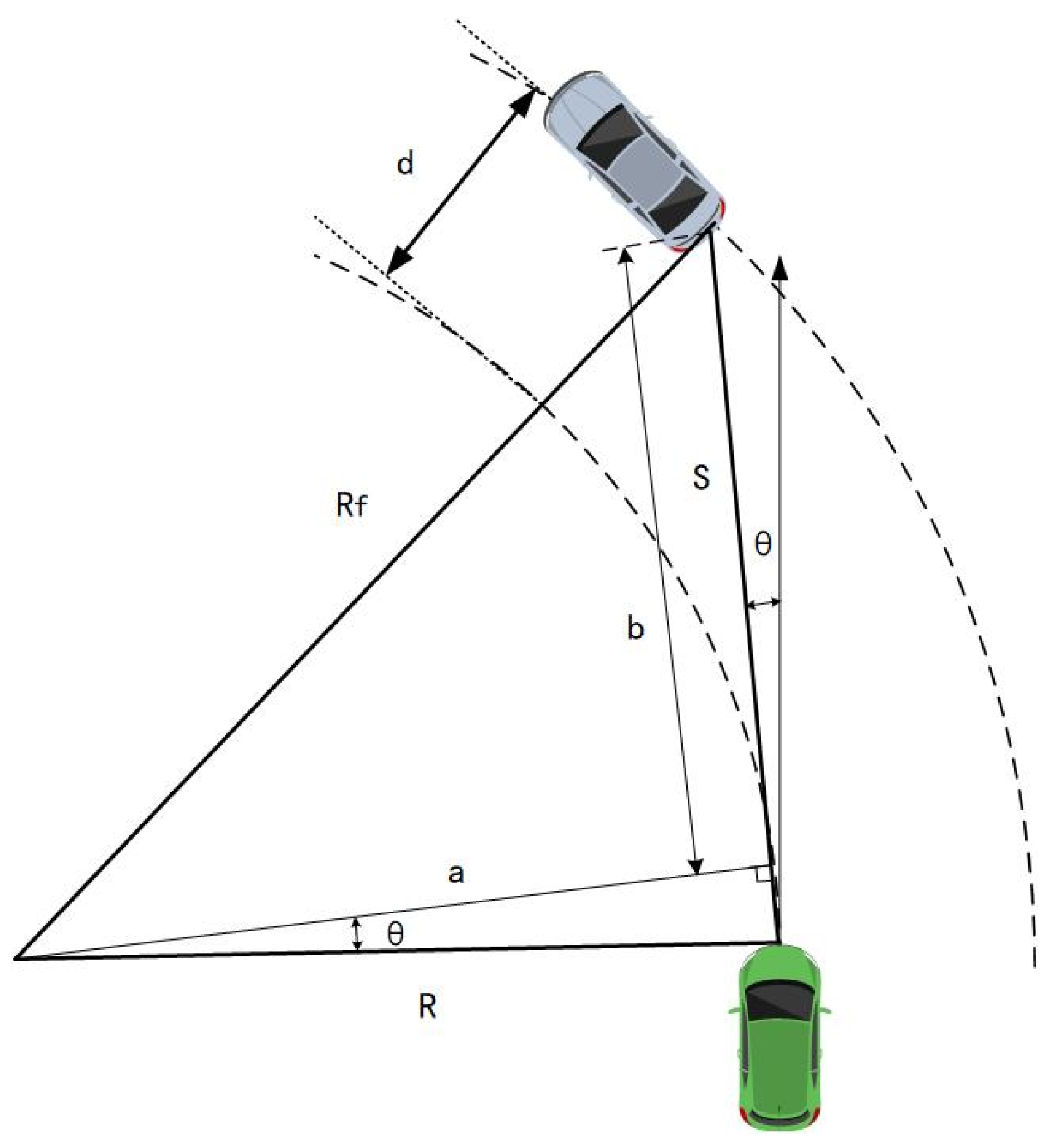
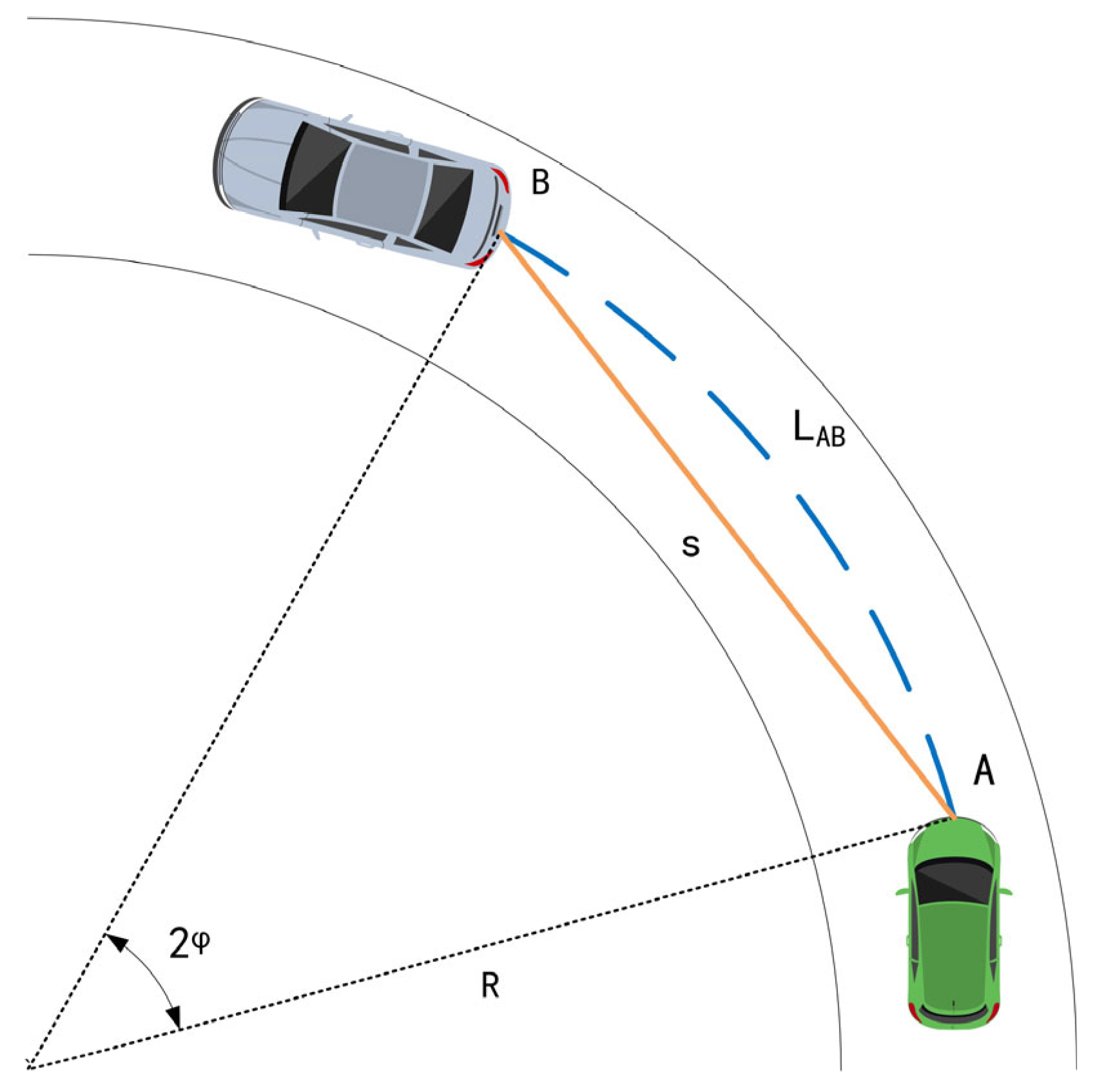
2.2. Road Curvature of the Ego Vehicle
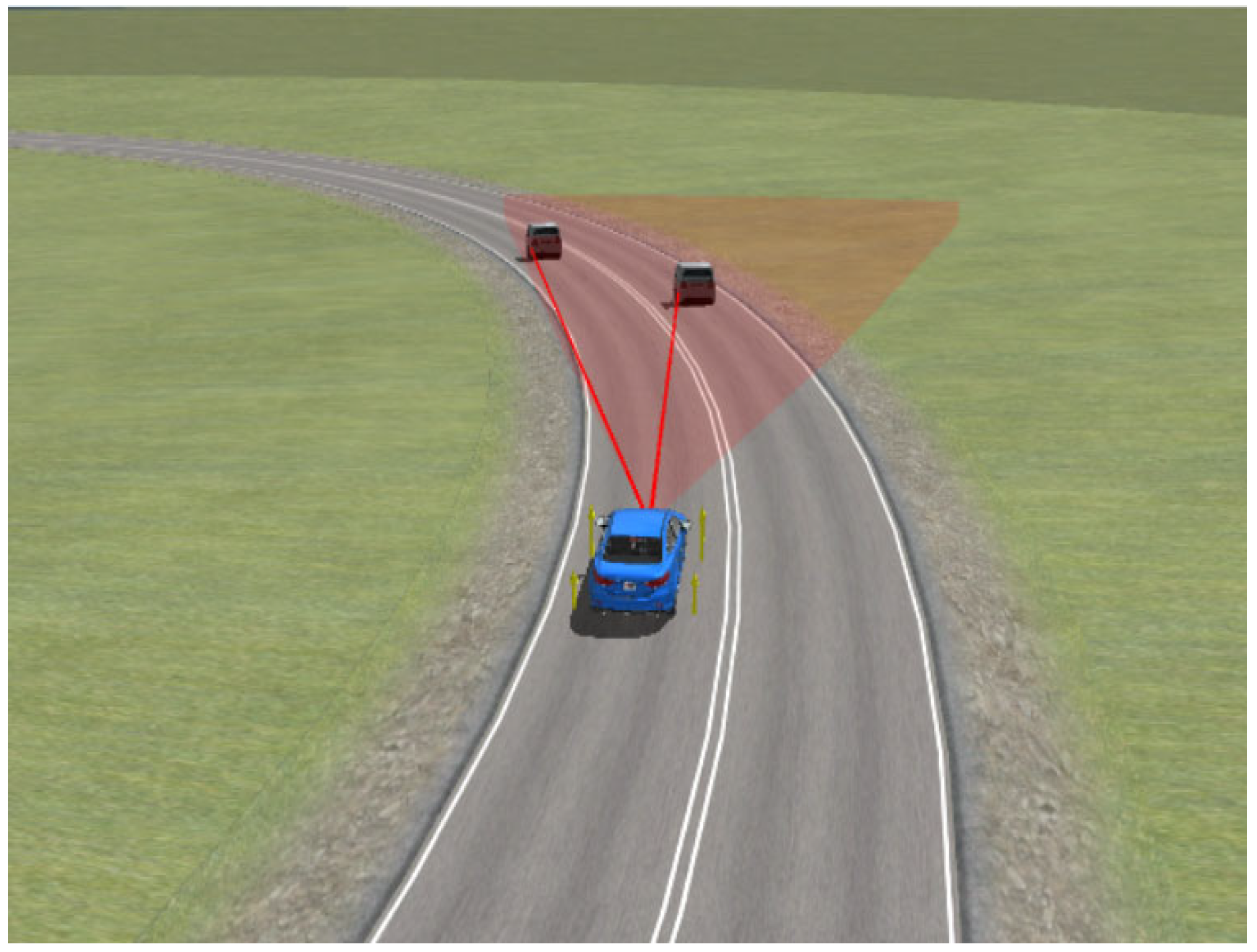
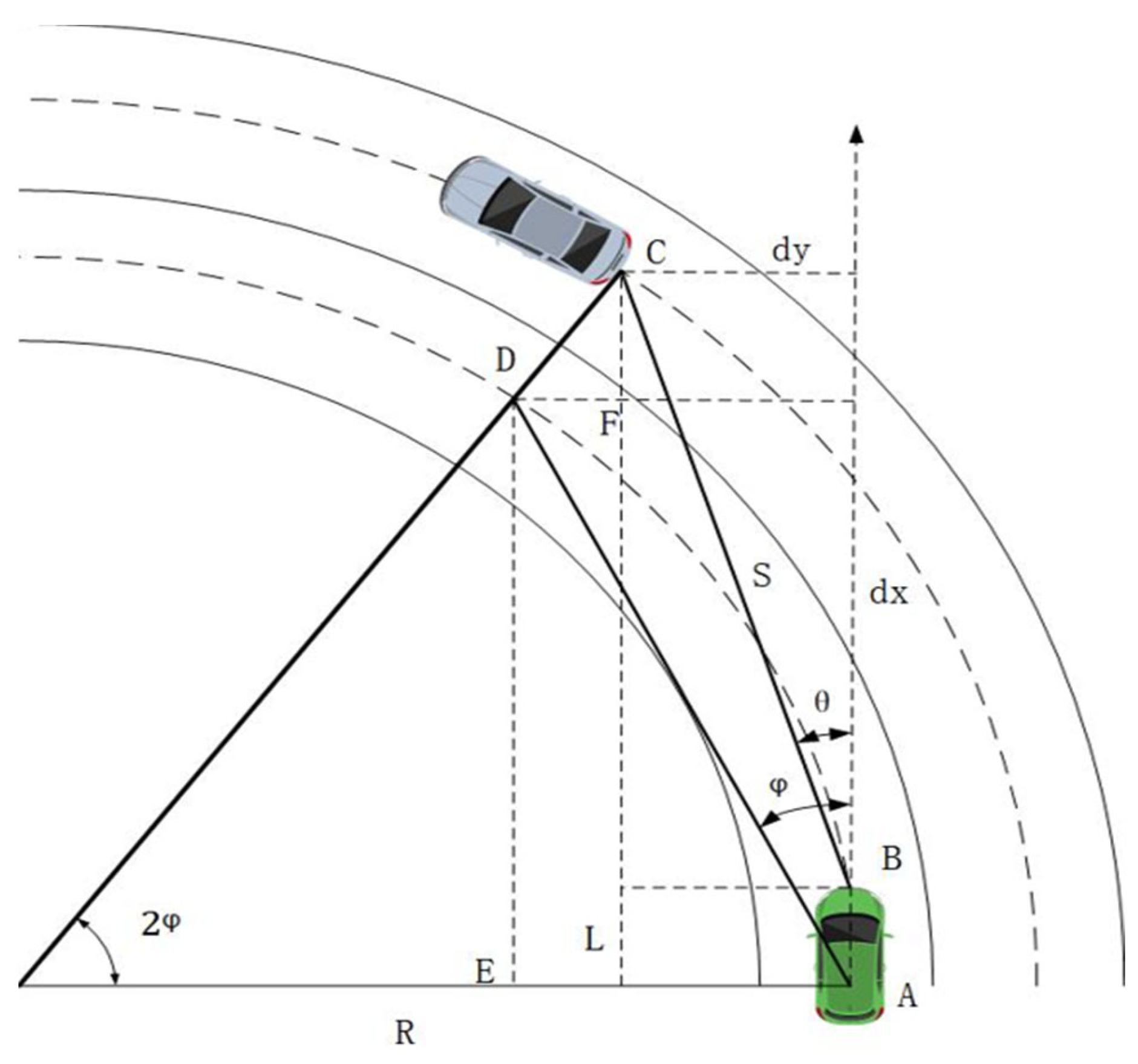
2.3. Curve Position Compensation
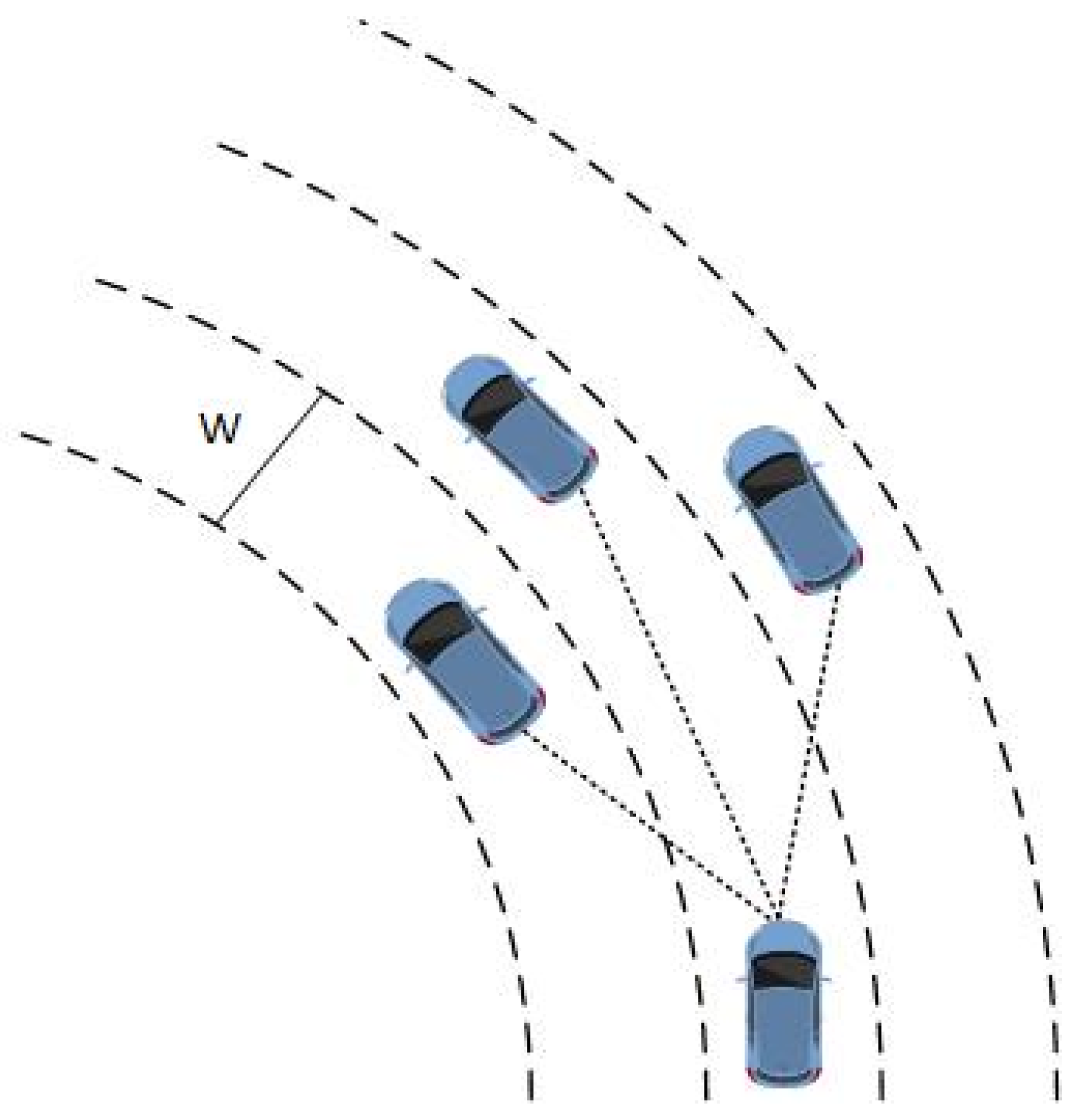
2.4. Selection of Hazardous Targets
- (1)
- When d > W/2, it is judged that the target vehicle is driving in the right lane and there is no risk of collision.
- (2)
- When −W/2 < d < W/2, it is judged that the target vehicle is driving in this lane with the risk of collision.
- (3)
- When d < −W/2, it is judged that the target vehicle is driving in the left lane without the risk of collision.
3. Fusion Control Strategy of AEB systems
3.1. A Graded Warning Strategy Based on the TTC Model
3.1.1. TTC Algorithm
3.1.2. TTC Thresholds
3.2. Graded Braking Strategy Based on Safety Distance
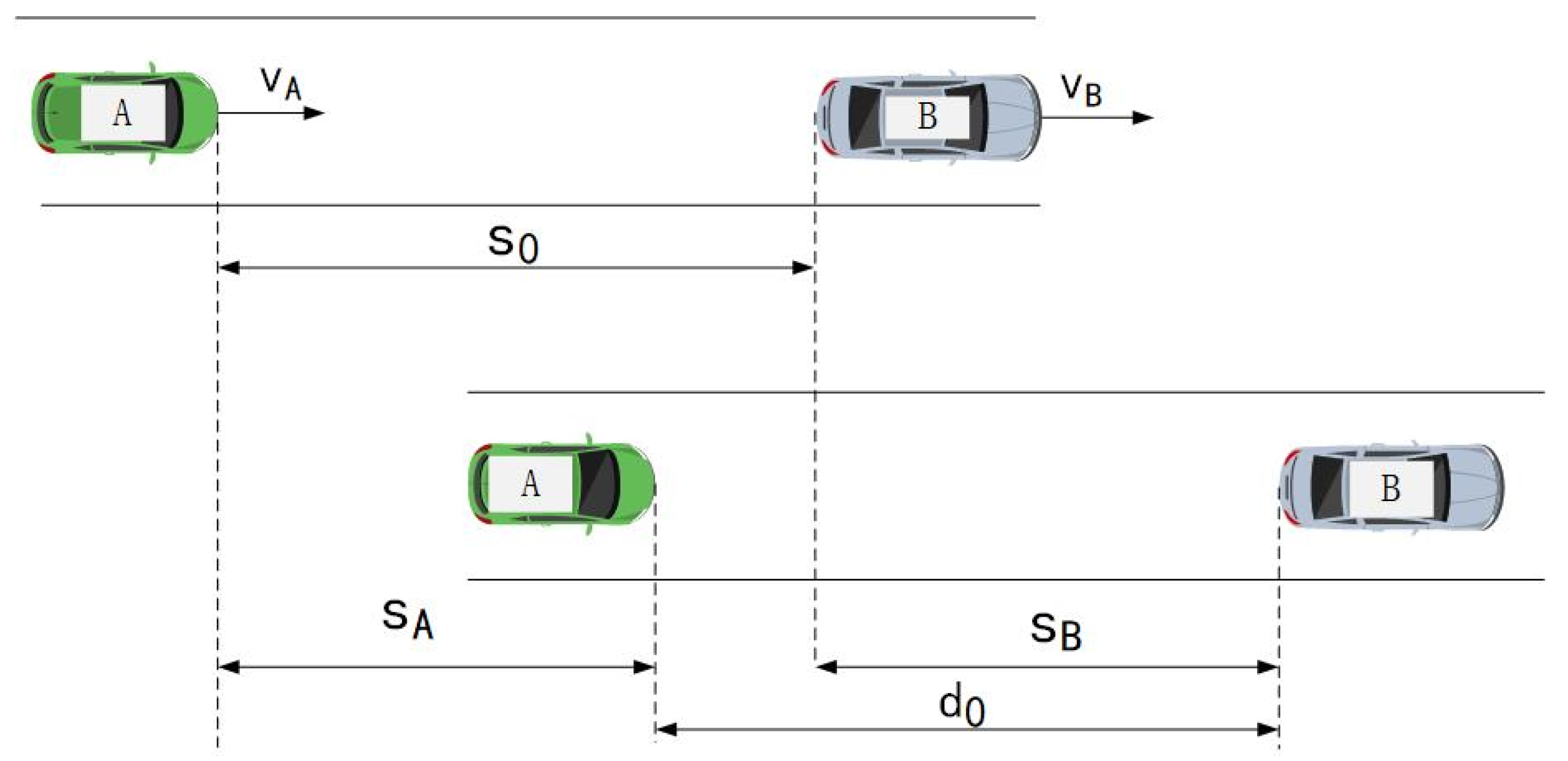
3.2.1. Safe Distance Model
3.2.2. Braking Intensity and Key Parameters
3.3. The Overall Process Design of the AEB System on Curved Roads
- (1)
- Target Recognition
- (2)
- The AEB control strategy
- When S0 ≥ S1, no braking is applied and the current speed is maintained;
- When S2 ≤ S0 < S1, partial braking occurs;
- When S0 < S2, full braking occurs.
4. Simulation Verification and Result Analysis
4.1. Simulation Environment
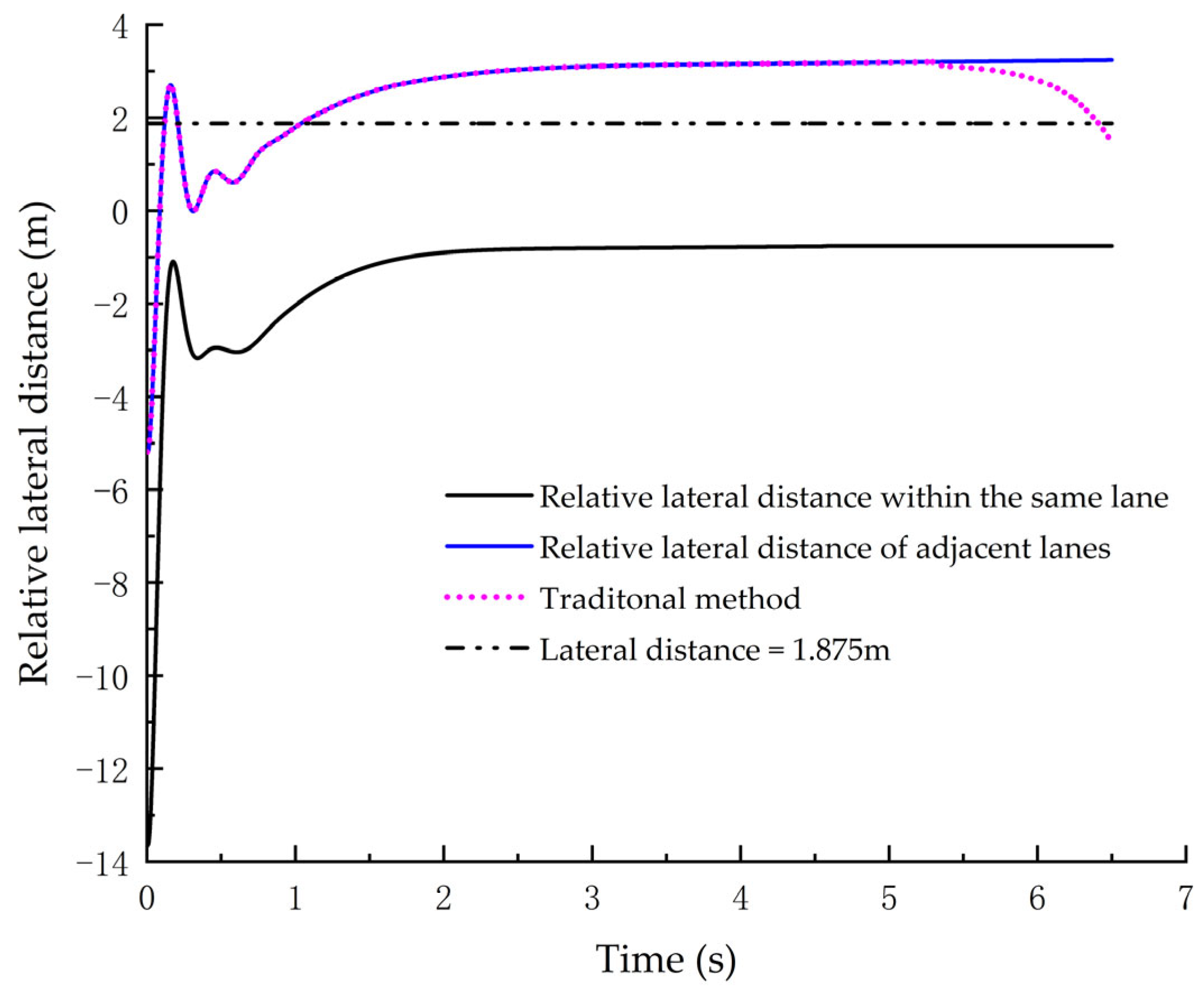
4.1.1. Target Recognition Model Validation
4.1.2. The AEB Test Conditions
4.1.3. The TTC Model Validation
4.2. Testing of CCRs
4.3. Testing of CCRm
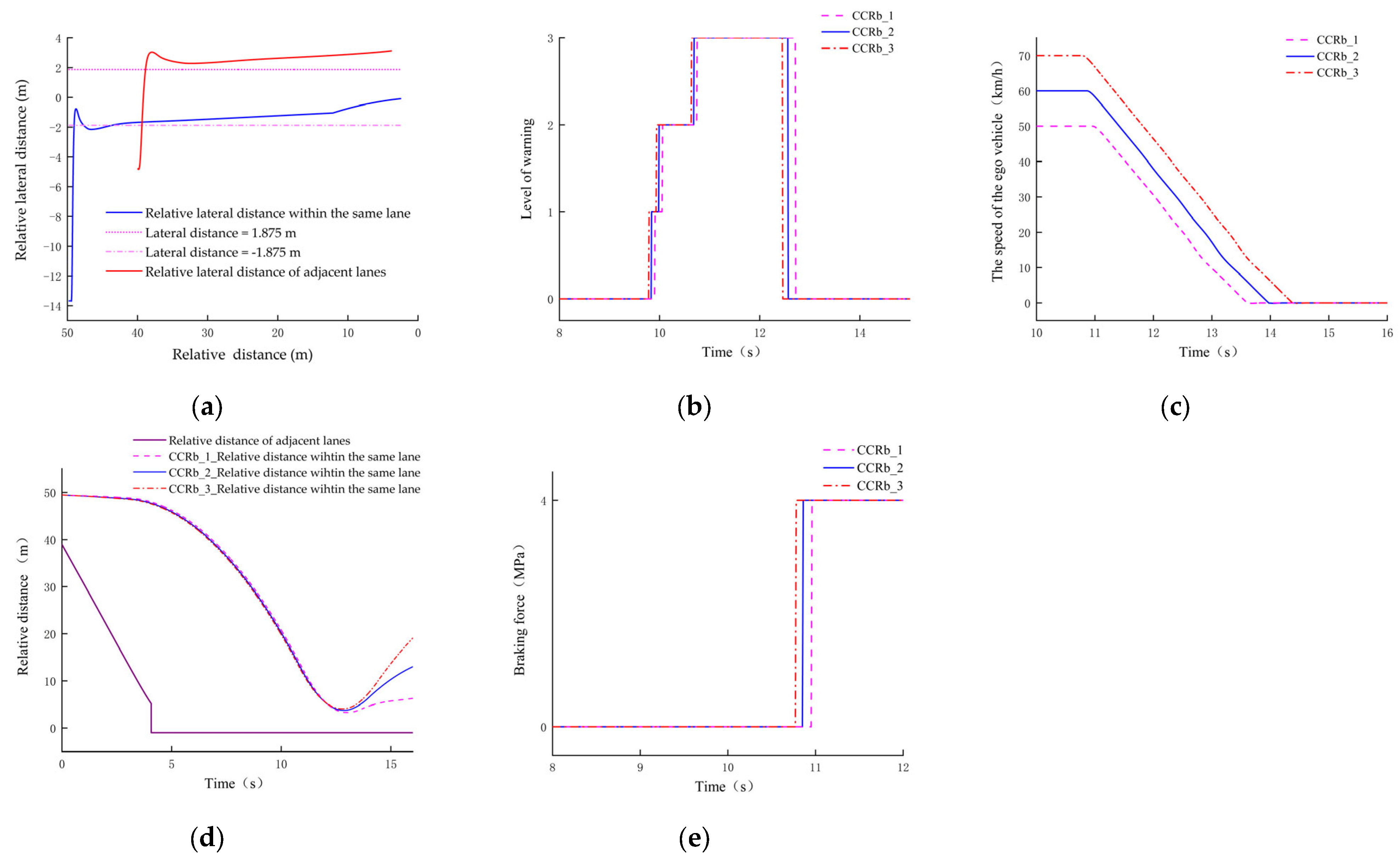
4.4. Testing of CCRb
4.5. Overall Simulation Results
5. Conclusions
Author Contributions
Funding
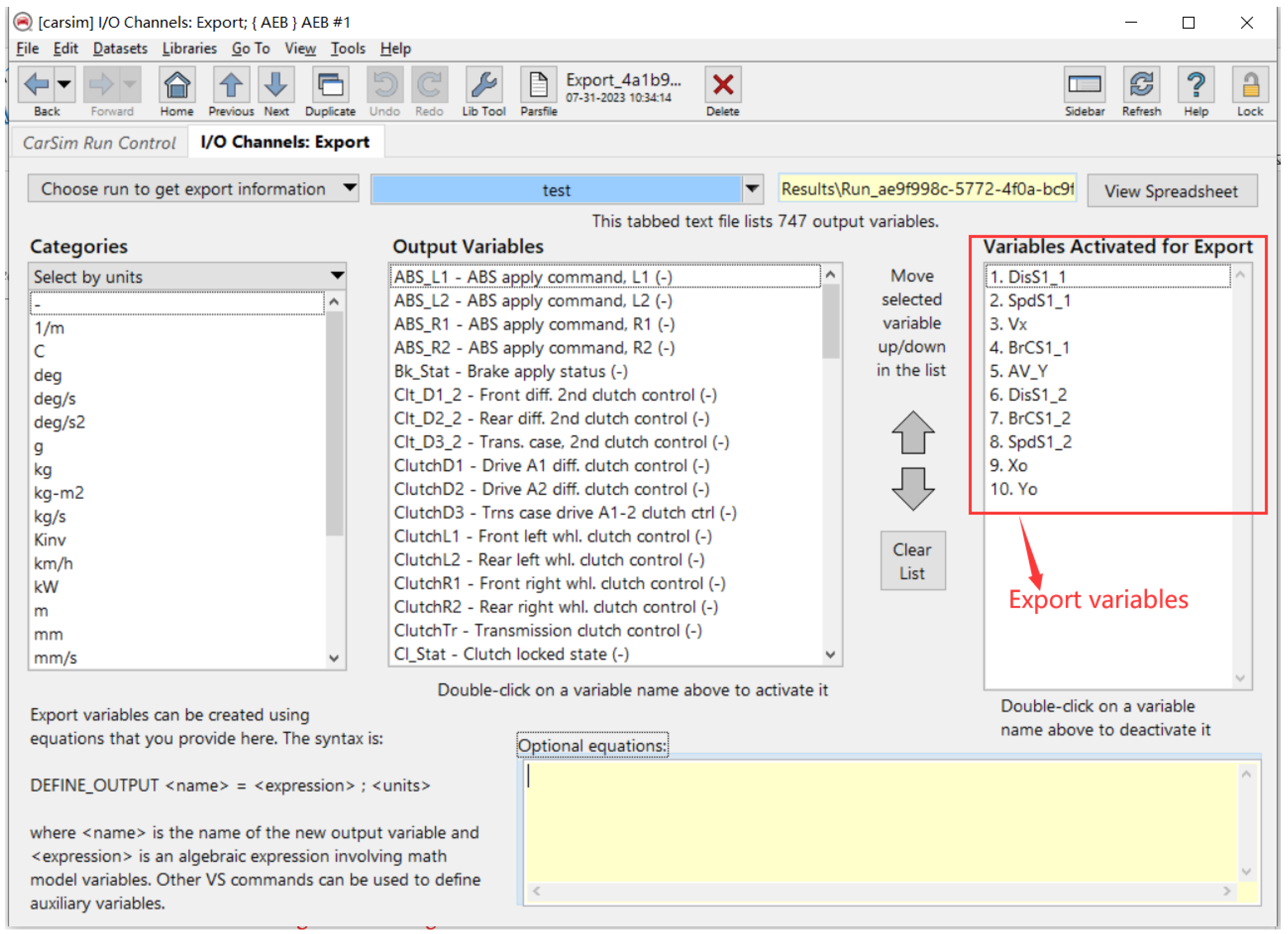
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
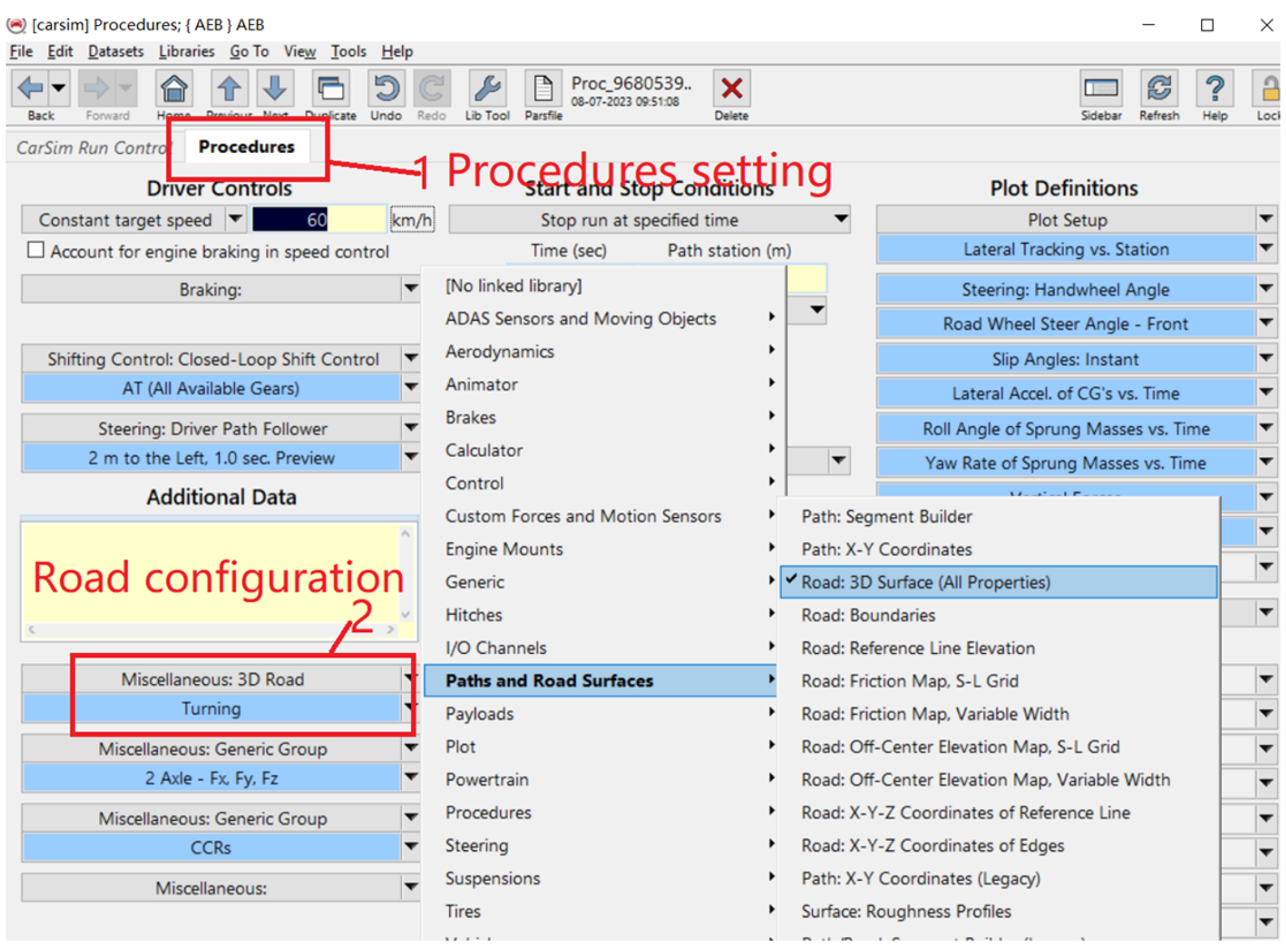
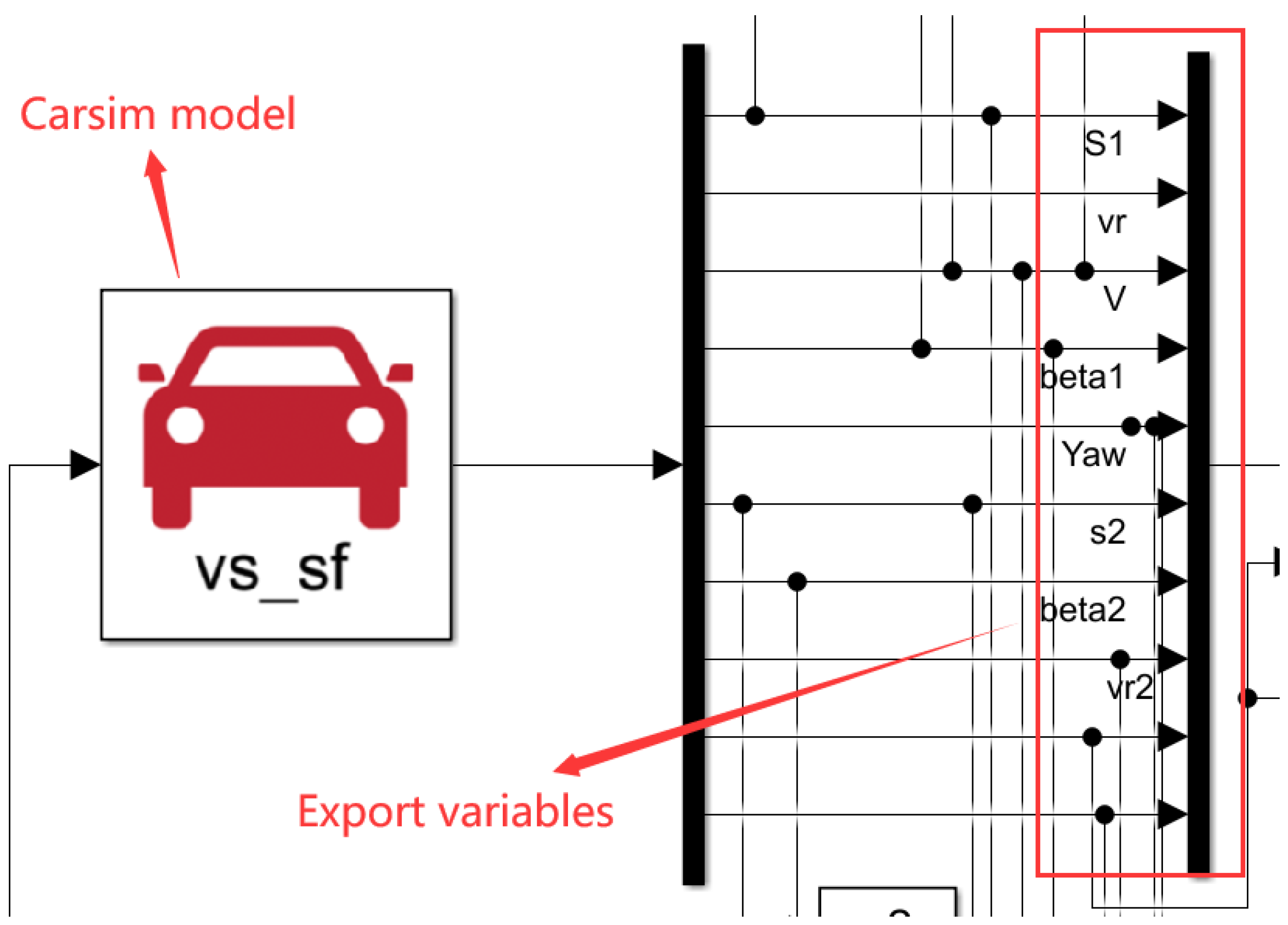
- Set up the vehicle model for the ego car in Carsim2019 software. As shown in Figure A1.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Names | Value | Unit |
|---|---|---|
| Width | 2131 | mm |
| Height | 1825 | mm |
| Wheelbase | 2866 | mm |
| Spring mass | 1370 | kg |
| Unsprung mass | 160 | kg |
| Minimum ground clearance | 375 | mm |
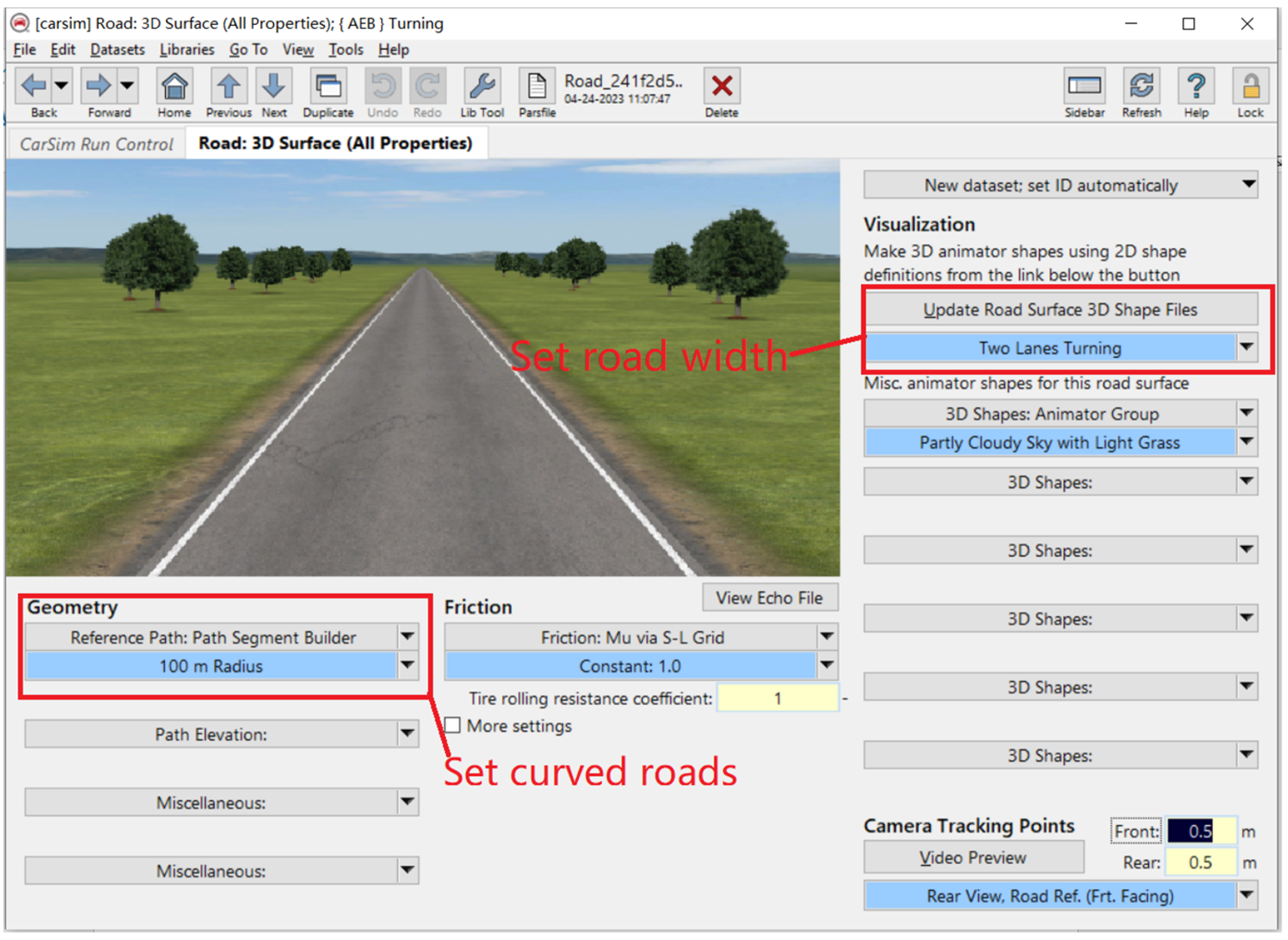
- 2.
- Road model
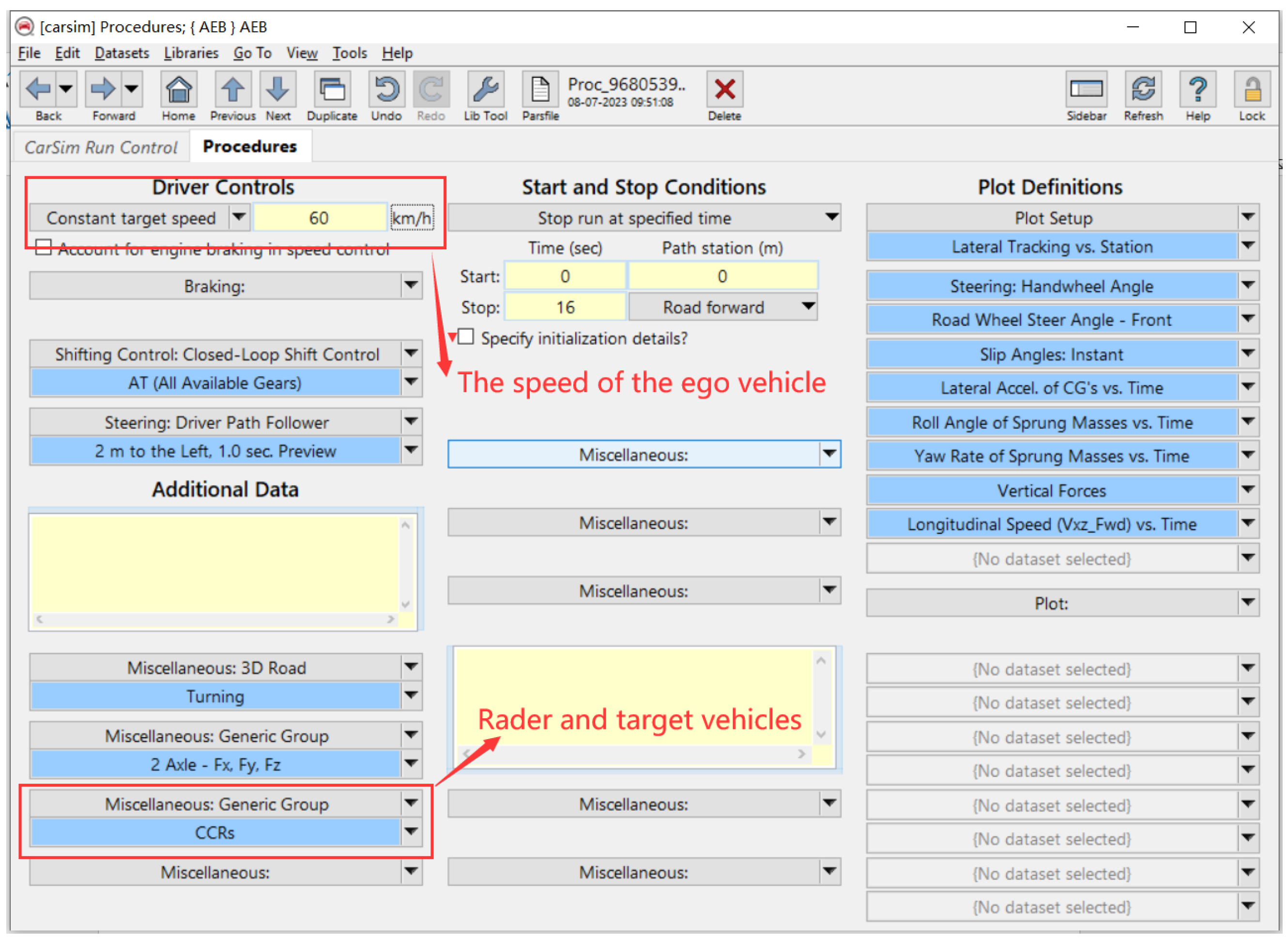
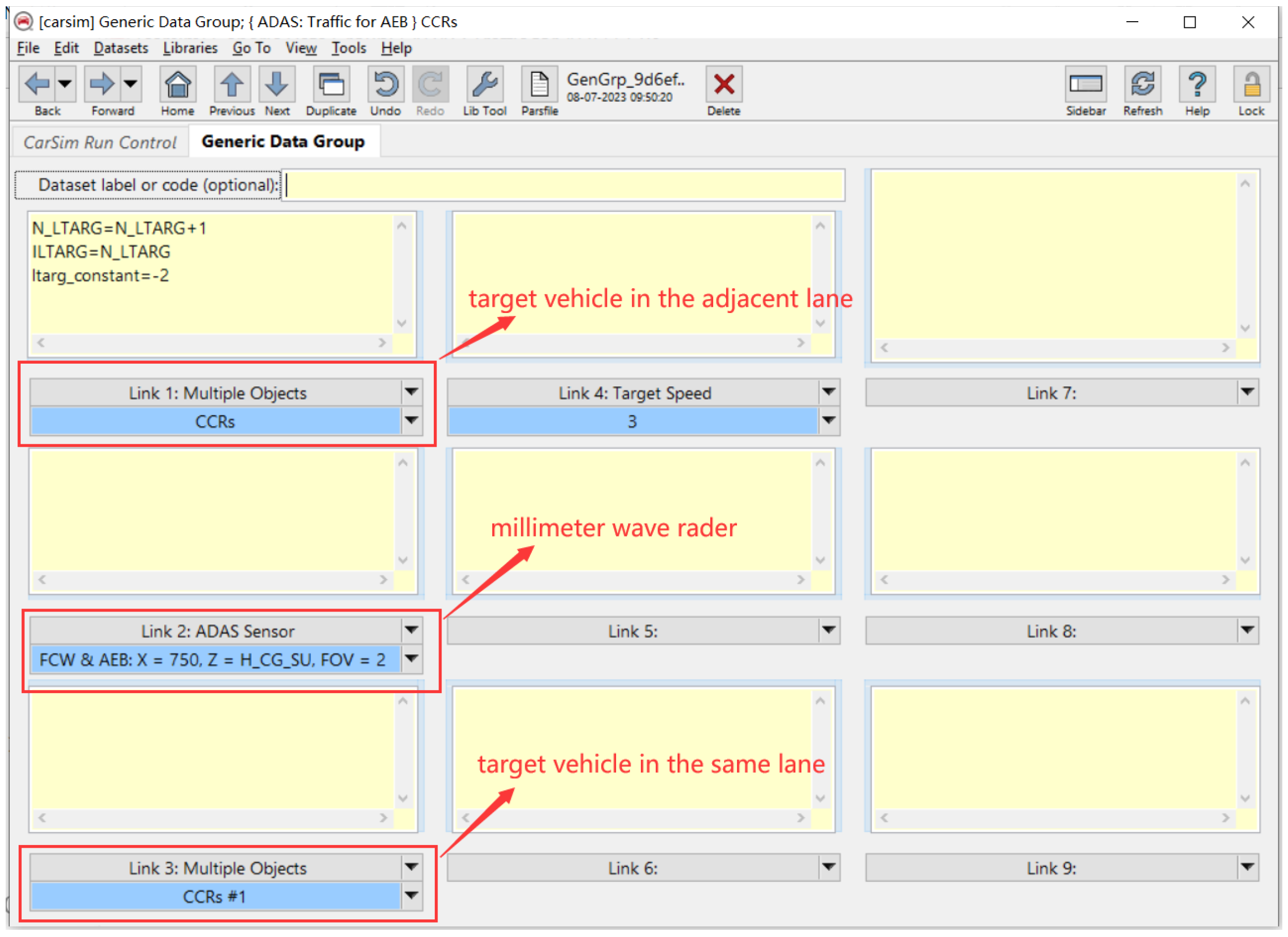
- 3.
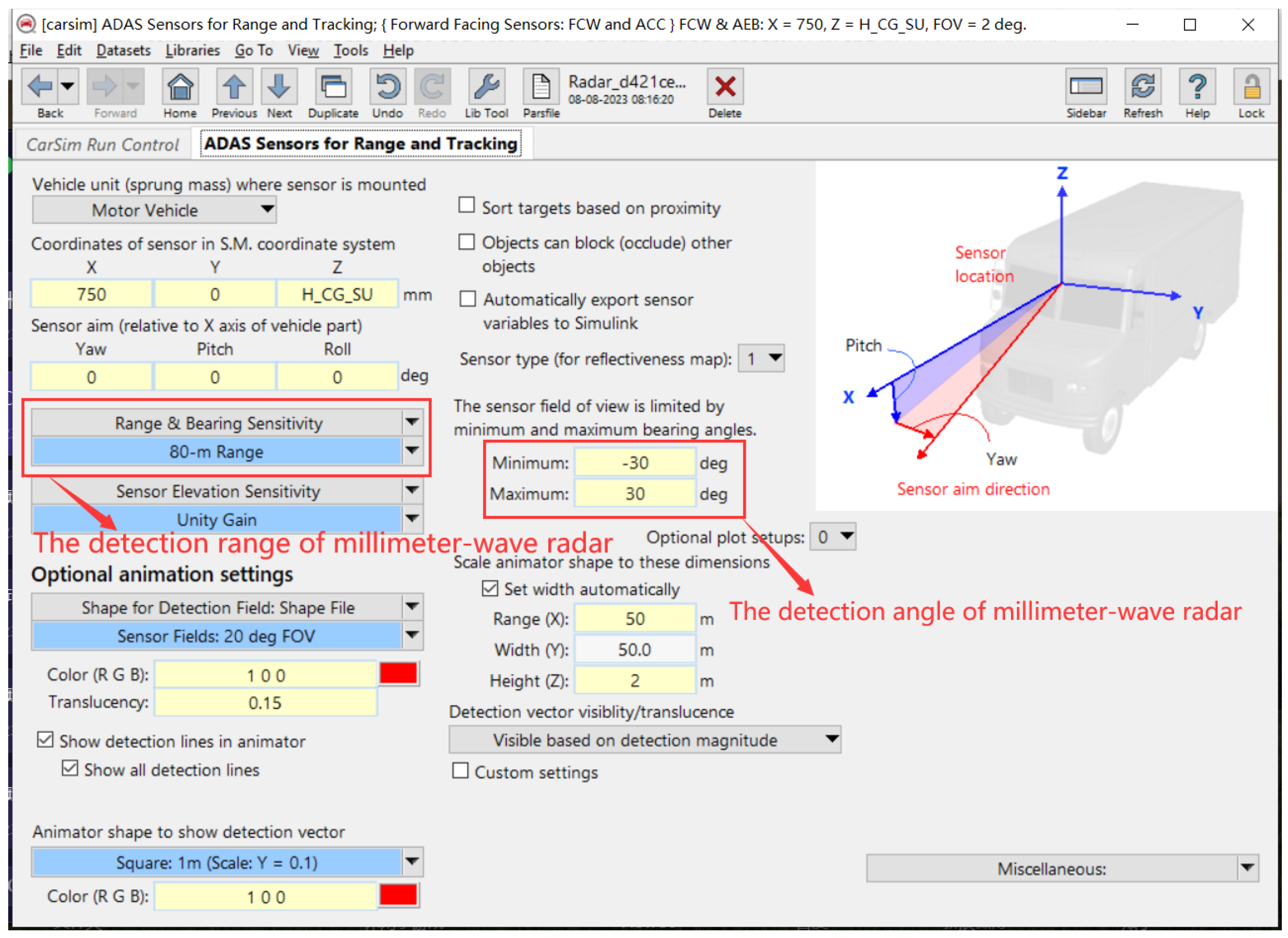
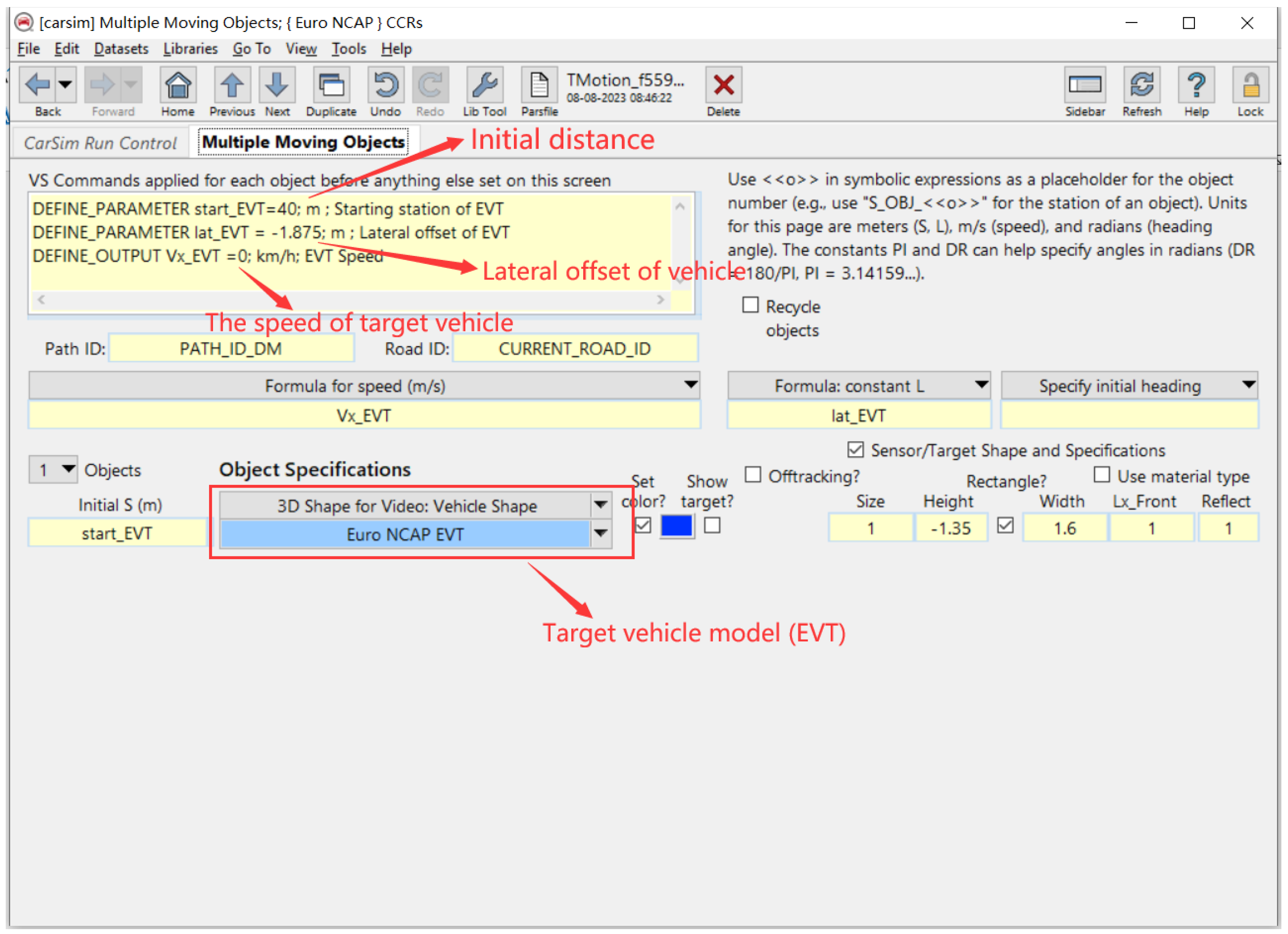
- Millimeter-wave radar and target vehicles
| Test Conditions | Test Number | The Ego Vehicle Speed (km/h) | Speed of the Preceding Vehicle (km/h) | Initial Distance to the Vehicle in the Same Lane (m) | Initial Distance to the Vehicle in Adjacent Lane (m) | Deceleration (m/s2) |
|---|---|---|---|---|---|---|
| CCRs | CCRs_1 | 50 | 0 | 50 | 40 | 0 |
| CCRs_2 | 60 | 0 | 50 | 40 | 0 | |
| CCRs_3 | 80 | 0 | 50 | 40 | 0 | |
| CCRm | CCRm_1 | 60 | 20 | 50 | 40 | 0 |
| CCRm_2 | 70 | 20 | 50 | 40 | 0 | |
| CCRm_3 | 80 | 20 | 50 | 40 | 0 | |
| CCRb | CCRs_1 | 50 | 50 | 50 | 40 | 4 |
| CCRs_2 | 60 | 60 | 50 | 40 | 4 | |
| CCRs_3 | 70 | 70 | 50 | 40 | 4 |
- 4.
- Connect Carsim2019 with Simulink2021

References
- Yang, Z. Research on Causes of Rear-End Collision and Behavior of Avoiding Collision Based on Deep Data Analysis. Ph.D. Thesis, Northeast Forestry University, Harbin, China, 2021. [Google Scholar]
- Cicchino, J.B.; Zuby, D.S. Characteristics of rear-end crashes involving passenger vehicles with automatic emergency braking. Traffic Inj. Prev. 2019, 20 (Suppl. 1), S112–S118. [Google Scholar] [CrossRef]
- Yang, W.; Zhao, H.Y.; Shu, H. Simulation and verification of the control strategies for AEB pedestrian collision avoidance system. J. Chongqing Univ. 2019, 42, 1–10. [Google Scholar]
- Shakouri, P.; Ordys, A. Nonlinear model predictive control approach in design of adaptive cruise control with automated switching to cruise control. Control Eng. Pract. 2014, 26, 160–177. [Google Scholar] [CrossRef]
- Deng, T.; Wu, Y. Simultaneous vehicle and lane detection via MobileNetV3 in car following scene. PLoS ONE 2022, 17, e0264551. [Google Scholar] [CrossRef] [PubMed]
- Suto, J. Real-time lanes line tracking algorithm to mini vehicles. Transp. Telecommun. J. 2021, 22, 461–470. [Google Scholar] [CrossRef]
- Huang, S.J.; Chao, S.T. A new lateral impact warning system with grey prediction. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2010, 224, 285–297. [Google Scholar] [CrossRef]
- Shimomura, N.; Fujimoto, K.; Oki, T.; Muro, H. An algorithm for distinguishing the types of objects on the road using laser radar and vision. IEEE Trans. Intell. Transp. Syst. 2002, 3, 189–195. [Google Scholar] [CrossRef]
- Schiffmann, J.K.; Widmann, G.R. Model-based scene tracking using radar sensors for intelligent automotive vehicle systems. In Proceedings of the Conference on Intelligent Transportation Systems, Boston, MA, USA, 12 November 1997; pp. 421–426. [Google Scholar]
- Schiffmann, J.K.; Widmann, G.R. Identification of in-lane vehicles using a scene tracking technique for intelligent automotive systems. Mob. Robot. XIII Intell. Transp. Syst. 1999, 3525, 338–349. [Google Scholar]
- He, L. Research on Forward Vehicle State Recognition Algorithm Based on Forward-Looking Radar. Master’s Thesis, Jilin University, Changchun, China, 2006. [Google Scholar]
- Miyahara, S. A Method for Radar-Based Target Tracking in Non-Uniform Road Condition; SAE Transactions: New York, NY, USA, 2003; pp. 1–9. [Google Scholar]
- Chen, X.W.; Liu, W.C.; Zhang, J.G.; Gang, L. Research on the key target distinguish method of automobile cruise system in the curve road. Mod. Manuf. Eng. 2017, 442, 80–84. [Google Scholar]
- Ma, G.C.; Liu, Z.D.; Pei, X.F.; Wang, B.F. Study on multi-object identification and compensation for on car rader. Trans. Beijing Inst. Technol. 2013, 33, 1135–1139. [Google Scholar]
- Peng, T.; Su, L.L.; Guan, Z.W.; Zhang, R. A safe lane-change model for vehicle emergent collision avoidance on curved section of highway. Automot. Eng. 2019, 41, 1013–1020. [Google Scholar]
- Yuan, C.C.; Li, D.Y.; Wu, F.; Liu, Y.; Zhang, L. Vehicle longitudinal active collision avoidance DRV safety distance model. J. Chongqing Univ. Technol. (Nat. Sci.) 2016, 30, 15–19. [Google Scholar]
- Pei, X.F.; Qi, Z.Q.; Wang, B.F.; Liu, Z. Vehicle frontal collision warning/avoidance strategy. J. Jilin Univ. (Eng. Technol. Ed.) 2014, 44, 599–604. [Google Scholar]
- Li, L.; Zhu, X.C.; Dong, X.F.; Ma, Z.X. Research on the collision avoidance strategy for autonomous emergency braking system. Automot. Eng. 2015, 37, 168–174. [Google Scholar]
- Bae, J.J.; Lee, M.S.; Kang, N. Partial and Full Braking Algorithm According to Time-to-Collision for Both Safety and Ride Comfort in an Autonomous Vehicle. Int. J. Automot. Technol. 2020, 21, 351–360. [Google Scholar] [CrossRef]
- Li, Z.; Ahn, S.; Chung, K.; Ragland, D.R.; Wang, W.; Yu, J.W. Surrogate safety measure for evaluating rear-end collision risk related to kinematic waves near freeway recurrent bottlenecks. Accid. Anal. Prev. 2014, 64, 52–61. [Google Scholar] [CrossRef] [PubMed]
- Gu, X.; Abdel-Aty, M.; Xiang, Q.J.; Cai, Q.; Yuan, J.H. Utilizing UAV video data for in-depth analysis of drivers’ crash risk at interchange merging areas. Accid. Anal. Prev. 2019, 123, 159–169. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Ran, B.; Qu, X.; Zhang, J.; Lin, Y. Cooperative Lane Changing Strategies to Improve Traffic Operation and Safety Nearby Freeway Off-Ramps in a Connected and Automated Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4605–4614. [Google Scholar] [CrossRef]
- Yang, X.X.; Zou, Y.J.; Chen, L. Operation analysis of freeway mixed traffic flow based on catch-up coordination platoon. Accid. Anal. Prev. 2022, 175, 106780. [Google Scholar] [CrossRef]
- Zhen, Y.J. Research on AEB Control Strategy Considering Road Curvature and Adhesion. Master’s Thesis, Chang’an University, Xi’an, China, 2022. [Google Scholar]
- Xia, H. Research on AEB System Strategy Based on Curve Traffic Accident. Master’s Thesis, Chongqing University of Technology, Chongqing, China, 2022. [Google Scholar]
- Wu, Y.H. Research on the Control Strategy of AEB System of Coaches under Curved Road Conditions. Master’s Thesis, Xiamen University of Technology, Xiamen, China, 2021. [Google Scholar]
- Xin, J.G.; Yang, F.Y.; Zhang, B.D.; Zhang, X. AEB control strategy of electric vehicle based on fusion algorithm. J. Beijing Jiaotong Univ. 2021, 45, 77–86+93. [Google Scholar]
- Zhang, S.L.; Deng, G.H.; Xv, Z.; Ou, J. Research on hierarchical control of vehicle automatic emergency braking system under curve condition. J. Chongqing Univ. Technol. (Nat. Sci.) 2021, 35, 85–93. [Google Scholar]
- Huang, Q.; Miller, R.; Mc Neille, P.; Roman, G. Development of a peer-to-peer collision warning system. Ford Techincal J. 2002, 5, 1–2. [Google Scholar]
- Zhang, Y.; Antonsson, E.K.; Grote, K. A new threat assessment measure for collision avoidance systems. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 968–975. [Google Scholar]
- Lan, F.C.; Yu, M.; Li, S.C.; Chen, J.Q. Research on hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision. Automot. Eng. 2020, 42, 206–214. [Google Scholar]
- Li, J.J. Research on Automatic Emergency Control Strategy of Brake-by-Wire under Real-Time Operating Conditions. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2022. [Google Scholar]



| Braking Intensity (g) | Probability of Collision Avoidance at Different Times | Average Value (s) | |||
|---|---|---|---|---|---|
| 5% | 25% | 75% | 95% | ||
| 0.5 | 0.2 | 0.6 | 1.5 | 1.8 | 1.15 |
| 0.675 | 0.15 | 0.5 | 1.1 | 1.5 | 0.8 |
| 0.85 | 0.1 | 0.4 | 0.85 | 1.2 | 0.6 |
| Types of Warning | Average Value (s) | Standard Deviation | 75% | 85% | 90% | ||
|---|---|---|---|---|---|---|---|
| light | 1.13 | 0.52 | 1.03 | 0.44 | 1.38 | 1.62 | 1.8 |
| sound | 0.99 | 0.44 | 0.90 | 0.43 | 1.20 | 1.40 | 1.55 |
| light + sound | 0.90 | 0.34 | 0.84 | 0.37 | 1.08 | 1.23 | 1.35 |
| Working Conditions | Minimum Safe Distance between Two Vehicles S0(m) |
|---|---|
| CCRs: The preceding vehicle is in a stationary state. | |
| CCRm: The preceding vehicle is moving at a constant speed. | |
| CCRb: The preceding vehicle is braking. |
| Distribution of Accidents | Interval 1 | Interval 2 | Interval 3 | Interval 4 | Average Value |
|---|---|---|---|---|---|
| ratio | 15% | 30% | 40% | 15% | |
| deceleration at level 1 (g) | −0.19 | −0.34 | −0.50 | −0.61 | 0.41 |
| deceleration at level 2 (g) | −0.42 | −0.66 | −0.82 | −0.94 | 0.71 |
| Test Conditions | Test Number | The Ego Vehicle Speed (km/h) | Speed of the Preceding Vehicle (km/h) | Initial Distance to the Preceding Vehicle (m) | Deceleration (m/s2) |
|---|---|---|---|---|---|
| CCRs | CCRs_1 | 50 | 0 | 50 | 0 |
| CCRs_2 | 60 | 0 | 50 | 0 | |
| CCRs_3 | 80 | 0 | 50 | 0 | |
| CCRm | CCRm_1 | 60 | 20 | 50 | 0 |
| CCRm_2 | 70 | 20 | 50 | 0 | |
| CCRm_3 | 80 | 20 | 50 | 0 | |
| CCRb | CCRs_1 | 50 | 50 | 50 | 4 |
| CCRs_2 | 60 | 60 | 50 | 4 | |
| CCRs_3 | 70 | 70 | 50 | 4 |
| Test Number | Effectiveness of Target Recognition on Curved Roads | Effects of Collision Avoidance | Minimum Relative Distance (m) |
|---|---|---|---|
| CCRs_1 | Effective recognition | Avoid collision | 2.74 |
| CCRs_2 | Effective recognition | Avoid collision | 2.31 |
| CCRs_3 | Effective recognition | Avoid collision | 3.42 |
| CCRm_1 | Effective recognition | Avoid collision | 3.34 |
| CCRm_2 | Effective recognition | Avoid collision | 2.93 |
| CCRm_3 | Effective recognition | Avoid collision | 3.02 |
| CCRb_1 | Effective recognition | Avoid collision | 3.28 |
| CCRb_2 | Effective recognition | Avoid collision | 3.66 |
| CCRb_3 | Effective recognition | Avoid collision | 4.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Yu, Z.; Xu, X.; Yan, Y. Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road. Electronics 2023, 12, 3490. https://doi.org/10.3390/electronics12163490
Zhang L, Yu Z, Xu X, Yan Y. Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road. Electronics. 2023; 12(16):3490. https://doi.org/10.3390/electronics12163490
Chicago/Turabian StyleZhang, Lin, Zhidong Yu, Xiaowei Xu, and Yunbing Yan. 2023. "Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road" Electronics 12, no. 16: 3490. https://doi.org/10.3390/electronics12163490
APA StyleZhang, L., Yu, Z., Xu, X., & Yan, Y. (2023). Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road. Electronics, 12(16), 3490. https://doi.org/10.3390/electronics12163490