1. Introduction
To increase driving safety and comfort, the development of Advanced Driving Assistance Systems (ADAS) is increasing in various countries [
1]. The Automatic Emergency Braking (AEB) system is one of the representative functions. Without interfering with the driver’s routine activities, the AEB system should reliably recognize front targets, evaluate the risk of collision, determine a reasonable intervention time, and achieve safe collision avoidance in a variety of traffic scenarios. Curved roads are a frequent occurrence while driving on both intercity and urban roads. According to the study [
2], while driving, vehicles fitted with the AEB systems show differences in performance on curved and straight roads. In particular, the probability of rear-end collisions is significantly greater when driving on curved roads than when driving on straight roads.
Currently, researchers primarily focus on the warning/braking control strategies of the AEB system, with the majority of validation scenarios being on straight roads. It was overlooked that when driving on curved roads, the AEB system may incorrectly identify vehicles in the adjacent lane as vehicles in the same lane. It can lead to erroneous triggering of the AEB system, affecting normal driving and potentially creating a risk of accidents. According to NHTSA’s investigation [
3], there were 176 instances of erroneous activations of Chrysler’s AEB system between 2012 and 2015. And the Nissan Rogue received 893 unexpected complaints about its AEB system during 2017–2018, primarily due to incorrect warnings and braking by the AEB system on curved roads. To reduce the issue of misidentification of the AEB system on curved roads, it is essential to accurately identify the preceding vehicle and select the most critical targets with the highest collision risks. This is a key problem that needs to be addressed. Target recognition is accomplished by locating targets using sensors and combining the data collected about the immediate environment. According to the different sensors, there are three main methods. The first method is based on machine vision, the article [
4] extracts lane lines by identifying the pixel points of lane lines in the video and uses a machine vision-based approach to detect vehicles. This method effectively reduces the interference of high-light environments on target tracking. The article [
5] proposes a MobileNetV3 model based on the encoder-decoder architecture and the multitask learning approach. Experimental results show that this model effectively improves the object detection speed and exhibits good adaptability to different environmental conditions. The article [
6] uses an image recognition method for lane line detection, taking into account vehicle steering angle changes, to calculate the curvature of the road. The second method is based on multi-sensor fusion, the article [
7] uses GPS and vehicle-to-vehicle communication sensors to estimate driving trajectories and relative positions of surrounding vehicles. The article [
8] proposes a target-tracking method that combines information from a laser radar and a camera by fusing them. In this method, radar data is used to detect objects while white lane lines are produced from camera images using image processing techniques. The target vehicles are then filtered based on their relative motion and position information for the white lane markings. The third method is based on the information of the ego vehicle and information detected by the millimeter-wave radar. Bosch and Delphi [
9,
10] use a method based on data from the preceding vehicle to predict the lane, where they fit the historical trajectory of the preceding vehicle and forecast the curvature radius of the curve. The article [
11] predicts the ego vehicle’s trajectory using its state curve integration and establishes the lane relationship between the target and ego vehicles using the position relationships between points and geometric elements. The article [
12] proposes a method for tracking target vehicles under variable curvature road conditions. A phase map is first created using azimuth and relative velocity, after which the target vehicle’s trajectory is indicated on the phase map. To estimate road curvature online, the article [
13] employs the extended Kalman filter to determine the angular velocity of vehicle transverse sway in real-time. The article [
14] designs a bend compensation algorithm based on the reference circular angle to achieve multi-target recognition. The first two methods used in the AEB system may not always match the demands of real-time performance and precision for emergency braking on curved roads. Since they entail several sensors and complicated, time-consuming algorithms. The method based on millimeter-wave radar and vehicle data, in comparison, has fewer influencing factors, a faster rate of computation, and simpler access to vehicle data. Therefore, this study adopts the method based on the information of the ego vehicle and information detected by the millimeter-wave radar to design the target recognition model.
After selecting the target vehicle with collision risk, the vehicle should be controlled for warning/braking. The most commonly used control strategies are the safety distance model and the Time-to-Collision (TTC) model. The article in [
15] investigates steering collision avoidance on curved roads without considering the emergency braking strategy of the vehicle. The article in [
16] considers various factors and establishes the Driver–Road–Vehicle factor (DRV) longitudinal safety distance model to achieve emergency braking. The article in [
17] designs a graded warning/braking algorithm that takes into account driver characteristics. The article in [
18] assesses the risk of collisions in terms of the inverse of the collision time and develops a graded control strategy. The article in [
19] establishes a graded braking strategy based on the TTC model and optimizes driving comfort by adding a braking buffer in some braking phases. Two measures [
20,
21] were developed based on the TTC to assess the risks. It corresponds to the Time-Exposed Time-to-Collision (TET) and the modified Time-Integrated Time-to-Collision (TIT). It is found that the crash risks increased and even resulted in traffic oscillations without appropriate parameter settings. Based on the Minimizing Overall Braking Induced by Lane Changes Model (MOBIL) and Intelligent Driver Model (IDM), the article in [
22] provides a connected and automated vehicle (CAV) platform and a cooperative lane-changing strategy to improve traffic operation and safety in the CAV environment. The article in [
23] selects three surrogate safety measures (SSMs) to evaluate traffic safety, including Criticality Index Function (CIF), Potential Index for Collision with Urgent Deceleration (PICUD), and Deceleration Rate to Avoid a Crash (DRAC). With increasing MPR, collision risk identified via CIF and DRAC shows an increased tendency, while that identified via PICUD has no apparent trend. In the AEB system, the safety distance model focuses on driving safety and the TTC model prioritizes driving comfort. There is a lack of control strategies that consider both safety and comfort.
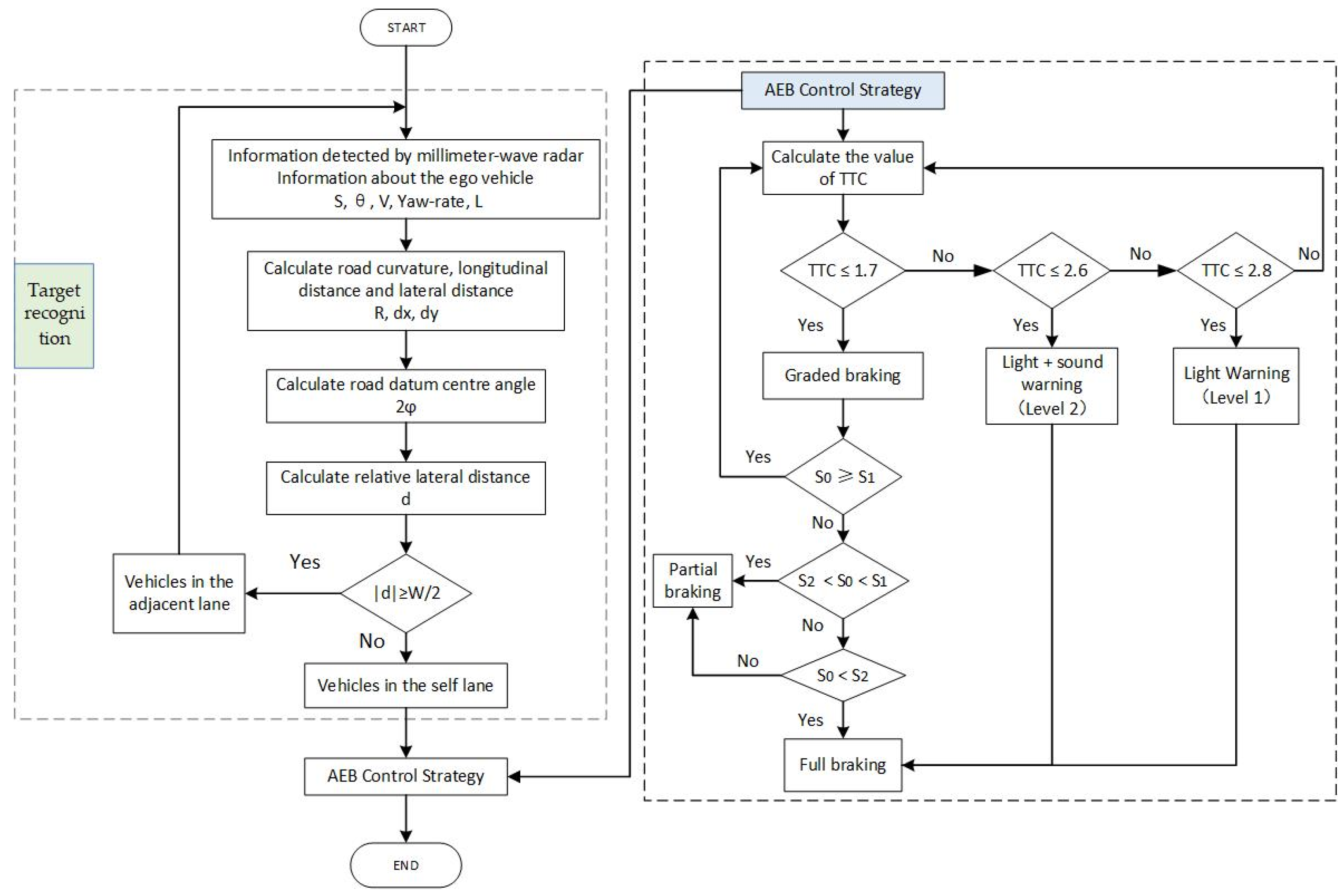
In conclusion, the AEB system’s target recognition is well developed for straight-ahead driving conditions. But, it ignores the possibility of incorrect recognition on curved roads. As a result of the rapid braking, the vehicle’s stability may be compromised, and the driver may have uncomfortable feelings. To address the issue of incorrect target recognition in AEB systems on curved roads, this study utilizes the information of the ego vehicle and information detected using the millimeter-wave radar to obtain the road curvature and relative distance. Then, the relative lateral distance is calculated to determine the positional relationship between the ego vehicle and the target vehicle, accurately recognizing the preceding vehicles. The safety distance concept emphasizes safety in the AEB control strategy. Emergency braking starts when the relative distance between two vehicles reaches a set safety distance threshold. Driving comfort may be impacted by the time of the braking, which may be earlier or later than typical braking. The TTC model places a strong emphasis on comfort; however, this strategy may not work while driving at high speeds with a small following distance. As a result, driving safety needs to be improved. The safety distance and TTC models are combined in this study to propose a fusion control strategy for the AEB system on curved roads that takes into account both safety and comfort. The TTC model is optimized based on the actual relative distance between the ego vehicle and the target vehicle on curved roads, taking into consideration the error between the detected relative distance and the actual relative distance on curved roads. A graded warning strategy is designed using the optimized TTC model, and the emergency braking intervention time is determined. When the collision risk reaches a certain level, the minimum safe distance threshold between the ego vehicle and the target vehicle is calculated based on the safety distance model under different braking intensities, a graded braking strategy is designed accordingly. The primary goal is to protect vehicles from erroneous triggering of the AEB system by vehicles in adjacent lanes and successfully preventing collisions with the preceding vehicle in the same lane.
5. Conclusions
To solve the problem of incorrect recognition of AEB systems on curved roads, a target recognition model is designed. Based on the TTC model and the safety distance model, a fusion control strategy is designed.
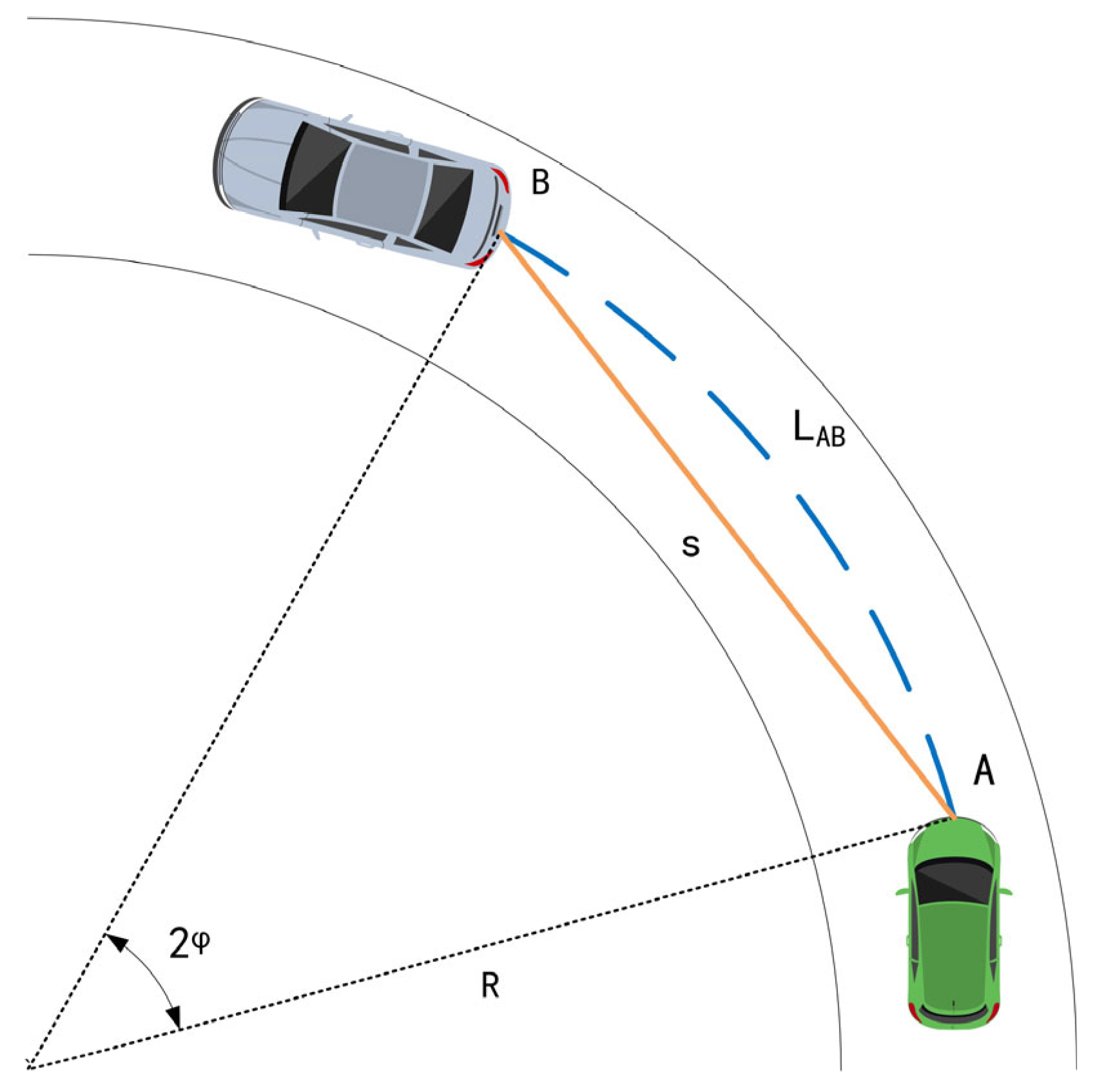
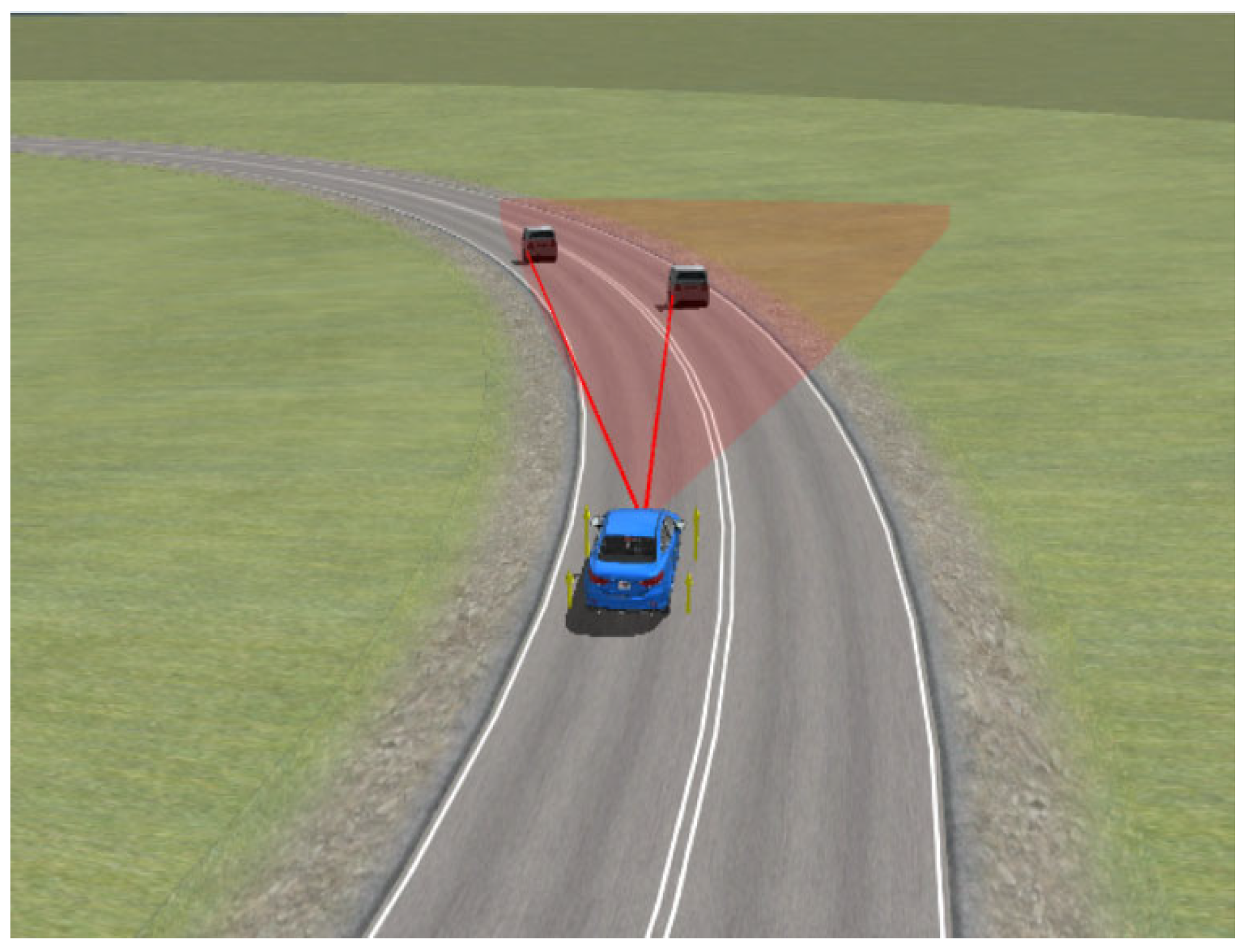
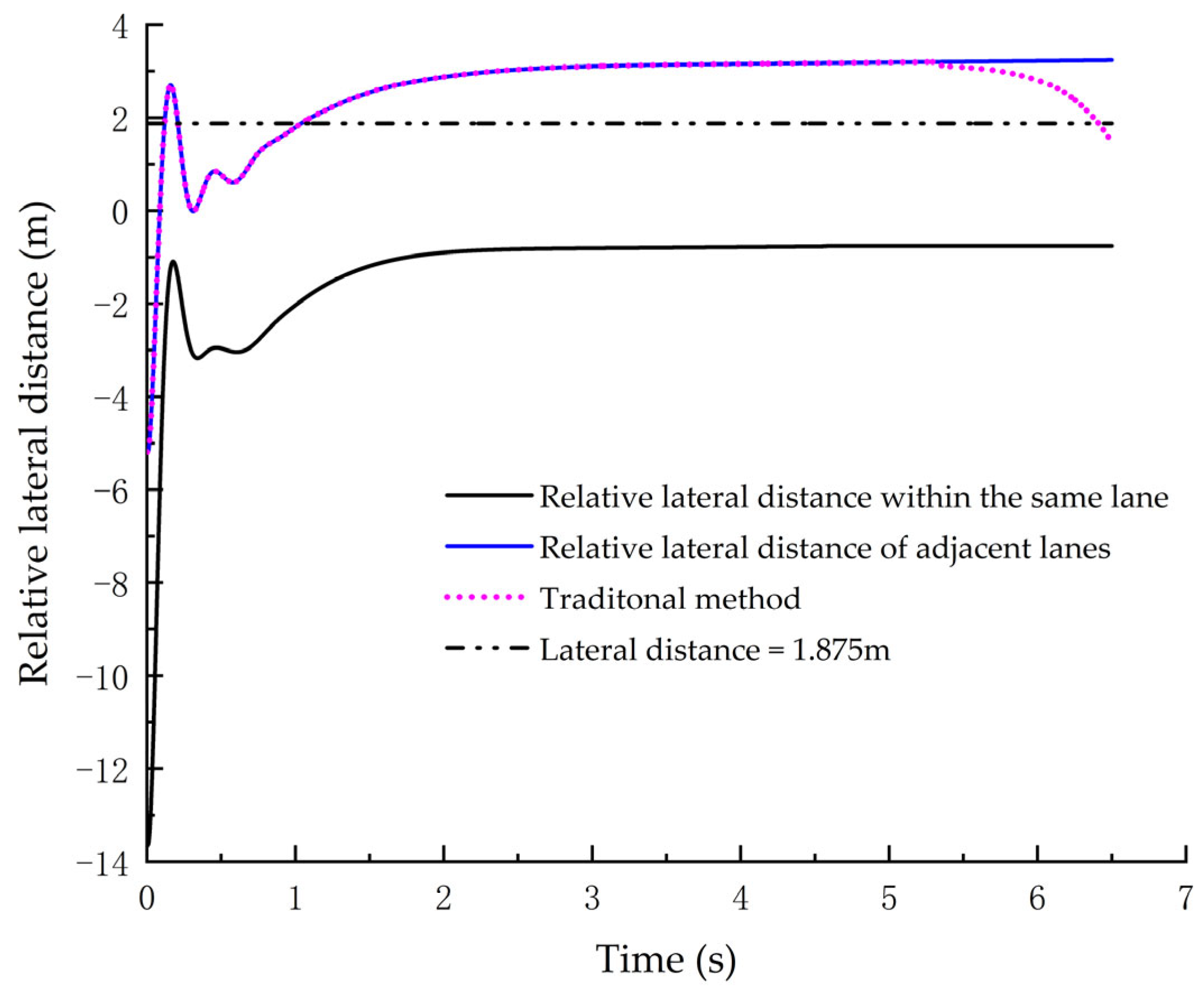
(1) This study presents the design of a target recognition model for the AEB system on curved roads. Due to the traditional target recognition method being susceptible to the road datum center angle (2ϕ) when the relative distance between the ego vehicle and the target vehicle being close, this study incorporates an additional target recognition method for close following distances, and it can solve the problem of misidentification when following vehicles at close distances on curved roads. The relative lateral distance between the ego vehicle and the preceding vehicle is obtained by calculating the road curvature and relative distance using information from the ego vehicle and information detected using the millimeter-wave radar. Based on the relative positional relationship between the ego vehicle and the preceding vehicle, vehicles in adjacent lanes and the same lane are recognized. After verification, the AEB systems can use the target recognition model to effectively identify the preceding vehicles, without misidentifying vehicles from adjacent lanes as vehicles in its lane. It eliminates instances of the AEB systems being triggered incorrectly and solves the issue of misidentification of the AEB systems on curved roads.
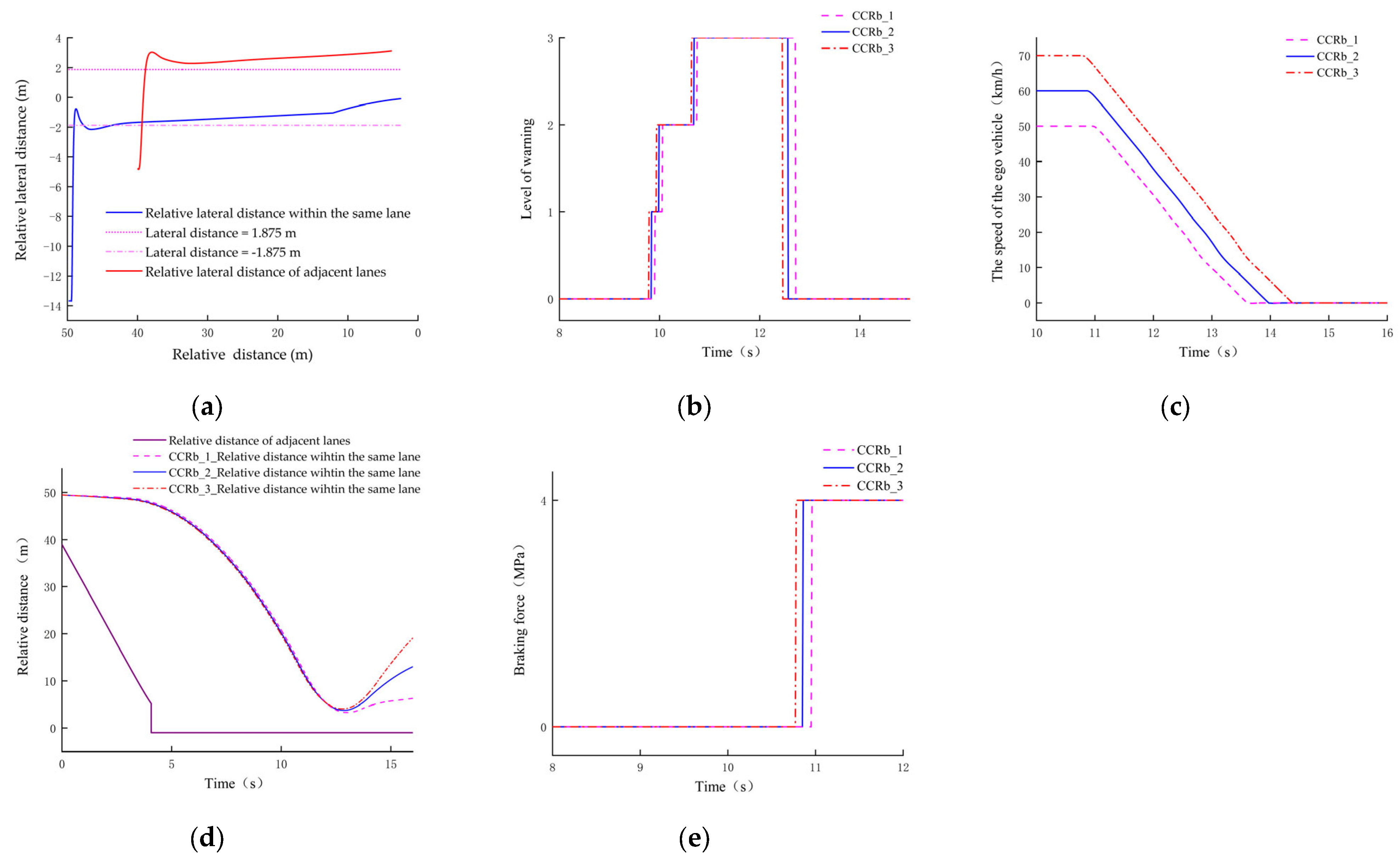
(2) The AEB control strategy presented in this study integrates the TTC model and the safety distance model. By calculating the TTC value based on the actual relative distance between the ego vehicle and the target vehicle on curved roads, the TTC model is optimized, and the warning time of the AEB system becomes more accurate. Based on the optimized TTC model, a graded warning strategy is designed and the intervention time for emergency braking is determined. When the collision risk reaches a certain level, the minimum safe distance threshold between the ego vehicle and the target vehicle is calculated based on the safety distance model under different braking intensities, and a graded braking strategy is designed accordingly. The vehicle can perform emergency braking based on the graded braking strategy. The verification is performed under the test conditions specified by Euro-NCAP, and the test results meet the requirements of Euro-NCAP. This effectively prevents collisions between the ego vehicle and the preceding vehicles in the same lane while maintaining comfort and safety.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}