
Small-Signal Modeling and Configuration Analysis of Grid-Forming Converter under 100% Renewable Electricity Systems

Abstract
:1. Introduction
2. Modeling of Devices and Comparative Analysis
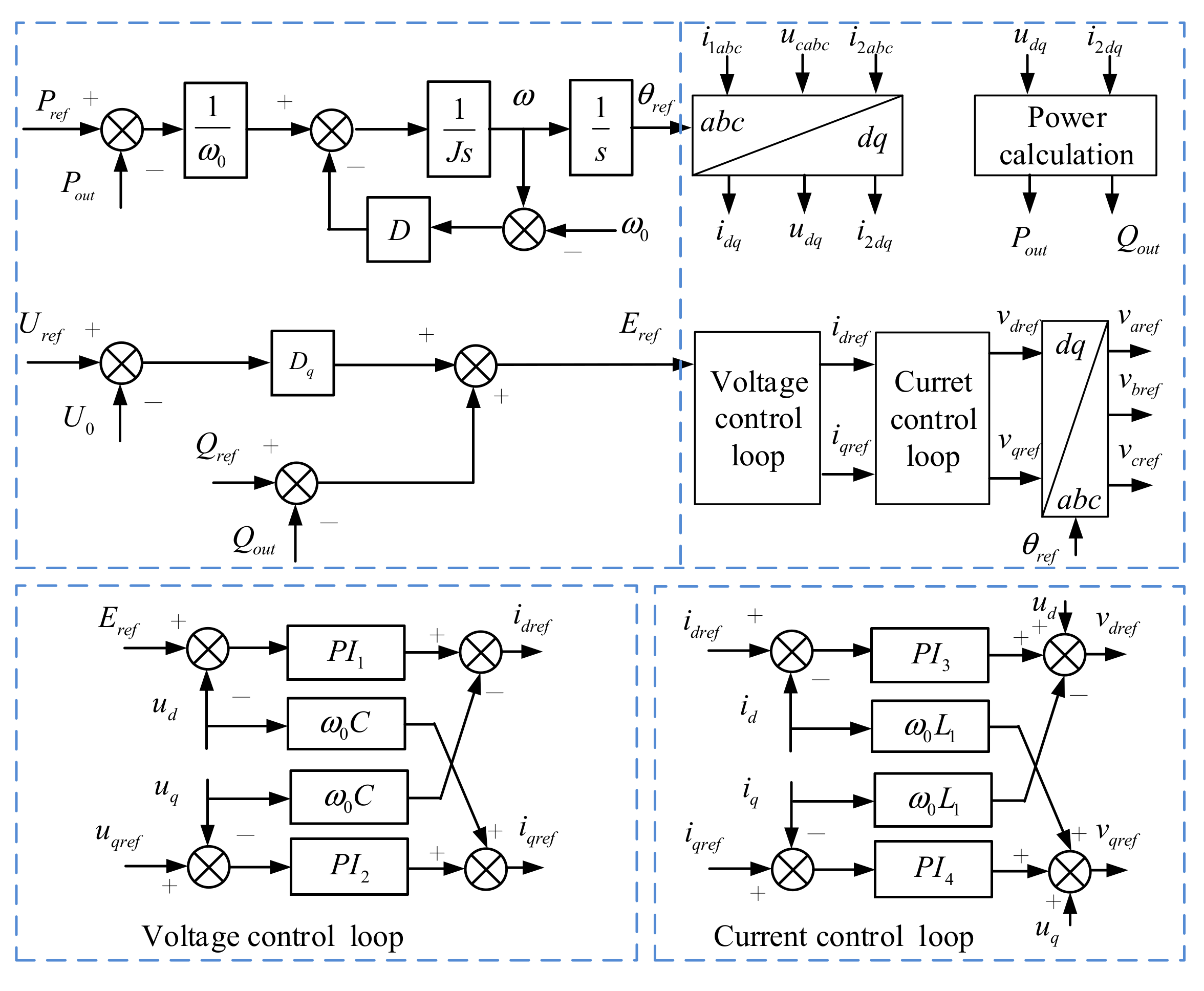
2.1. Modeling of GFM Converter
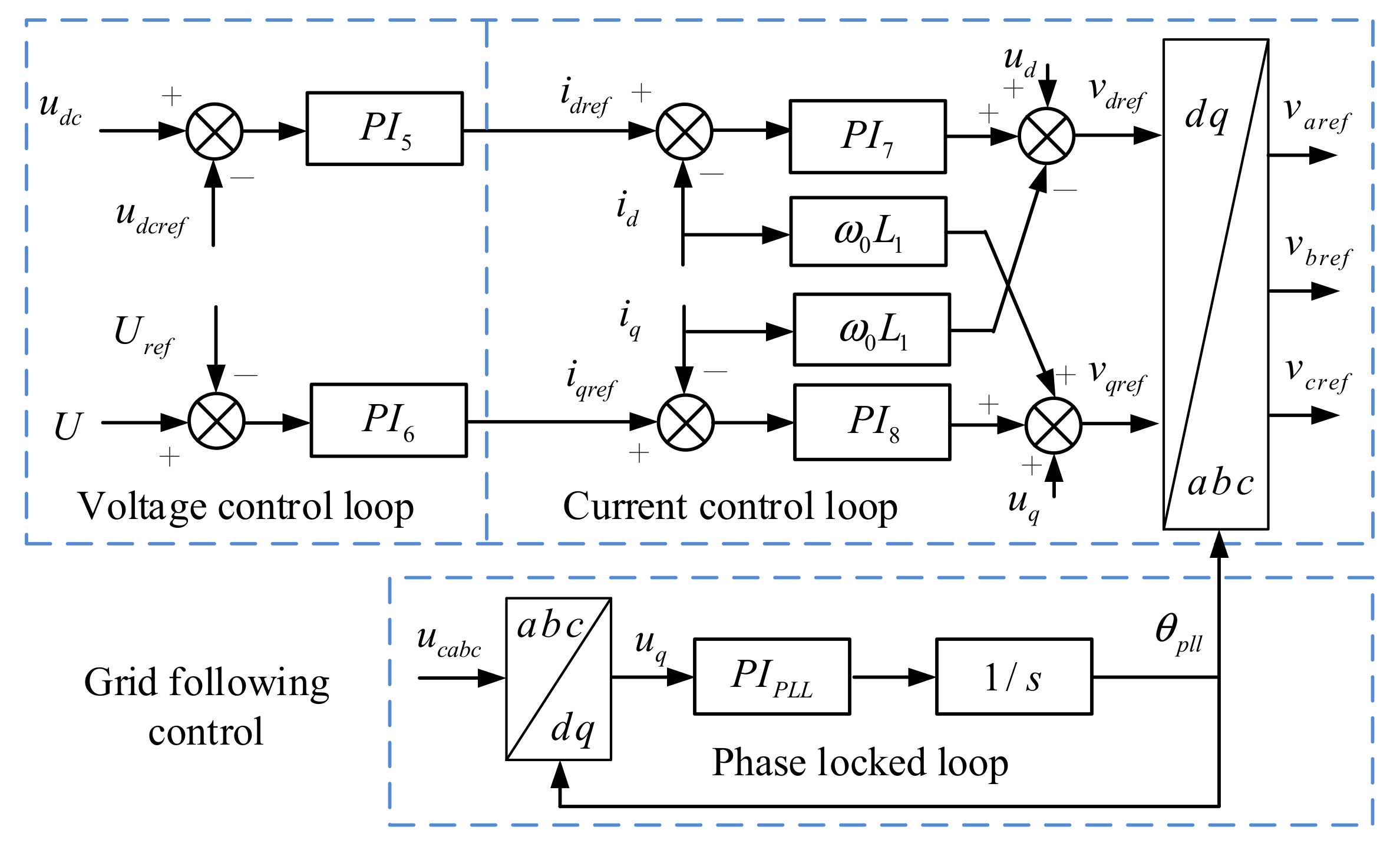
2.2. Modeling of GFL Converter
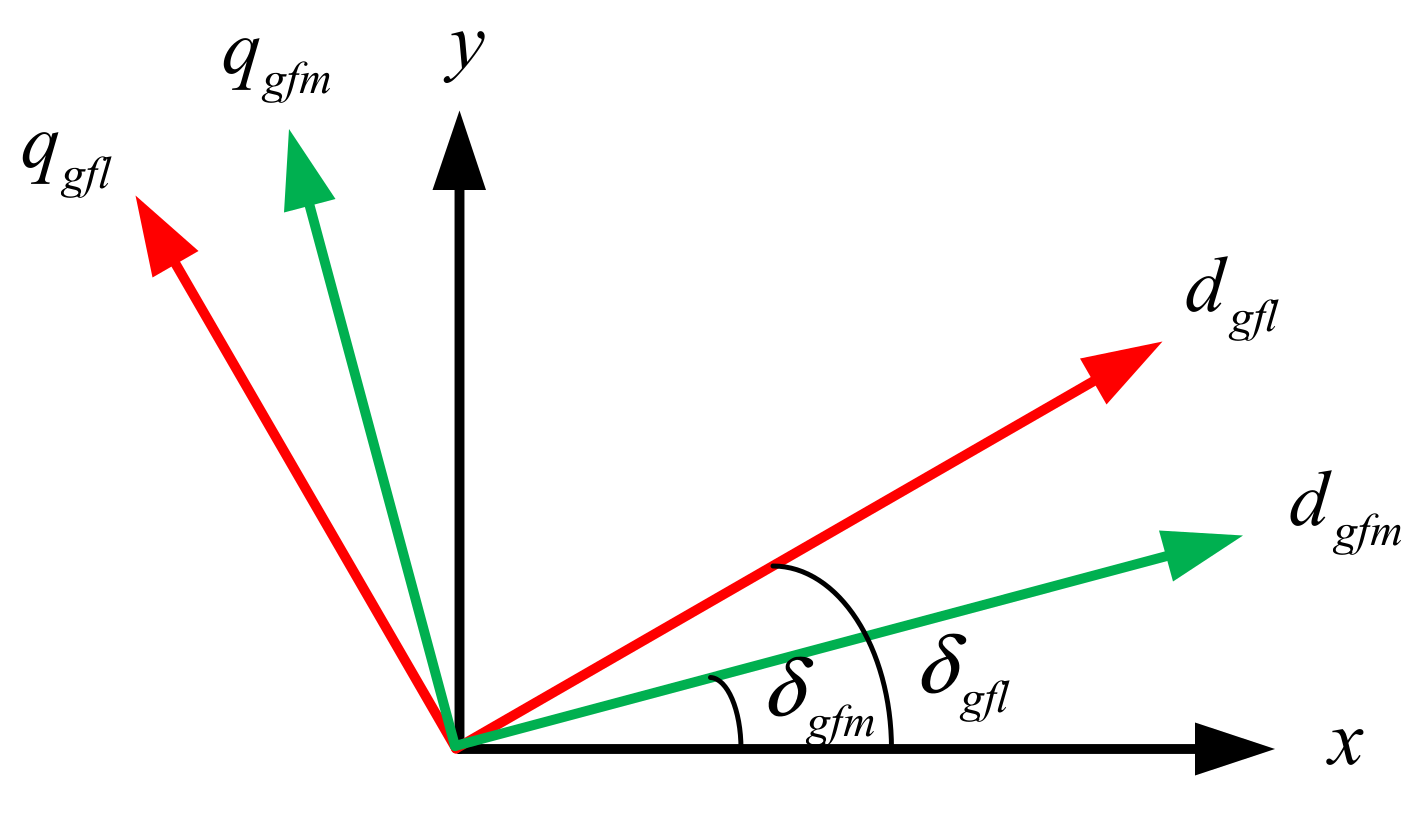
2.3. Interfaces Relationship
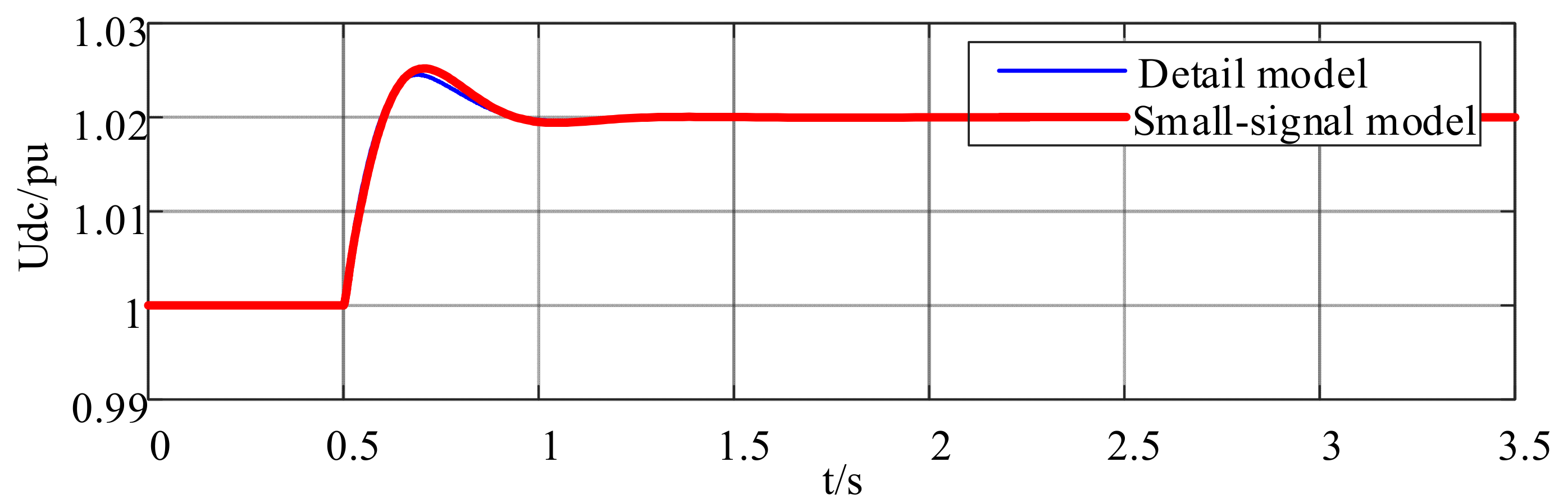
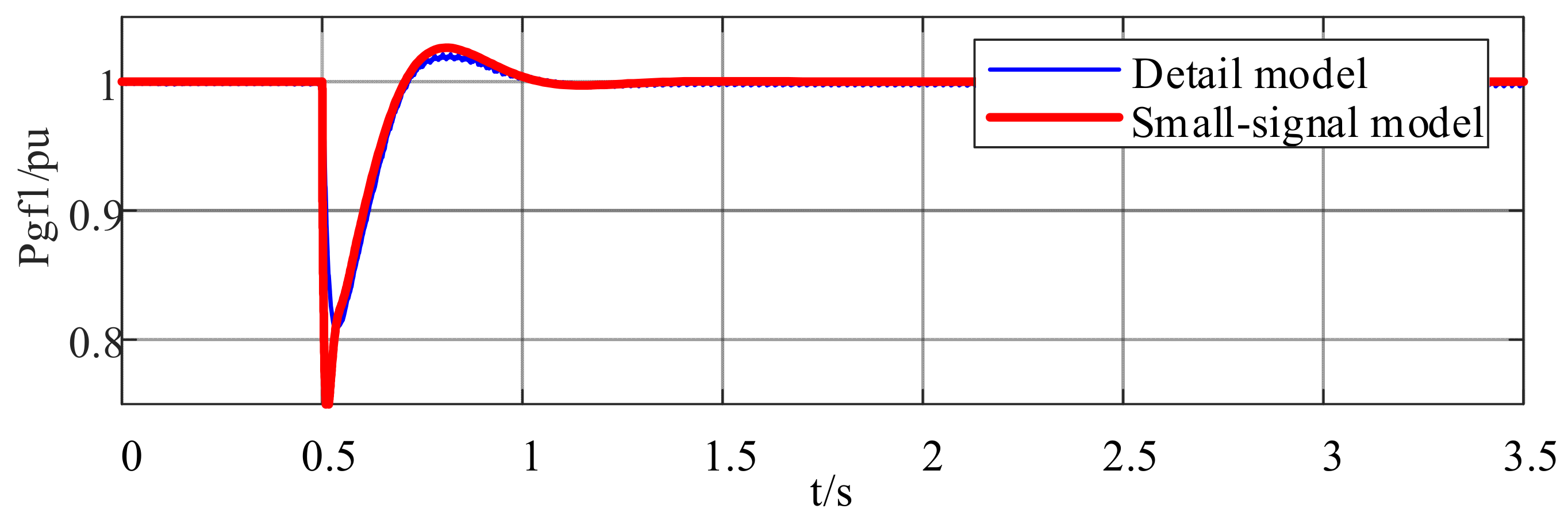
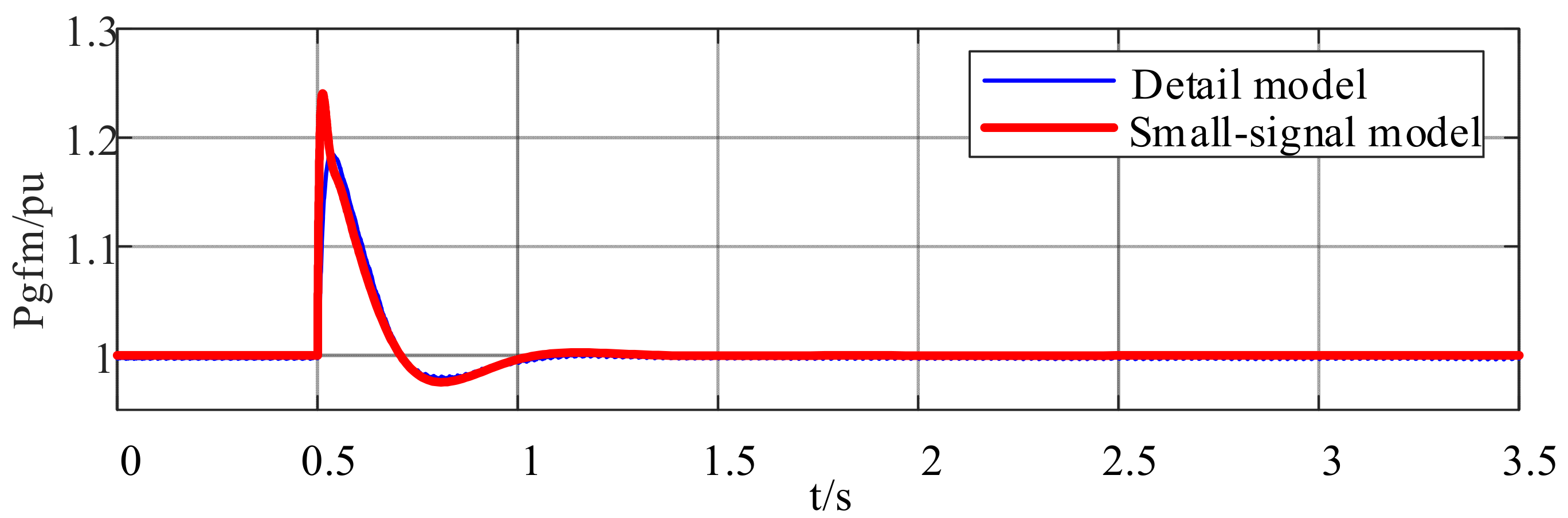
2.4. Small-Signal Model Validation
3. Characteristics Comparative Analysis and Proportional Configuration Method
3.1. Characteristics Comparative Analysis of GFM and GFL Control
3.2. Proportional Configuration Method
4. Discussion Analysis and Engineering Case Study
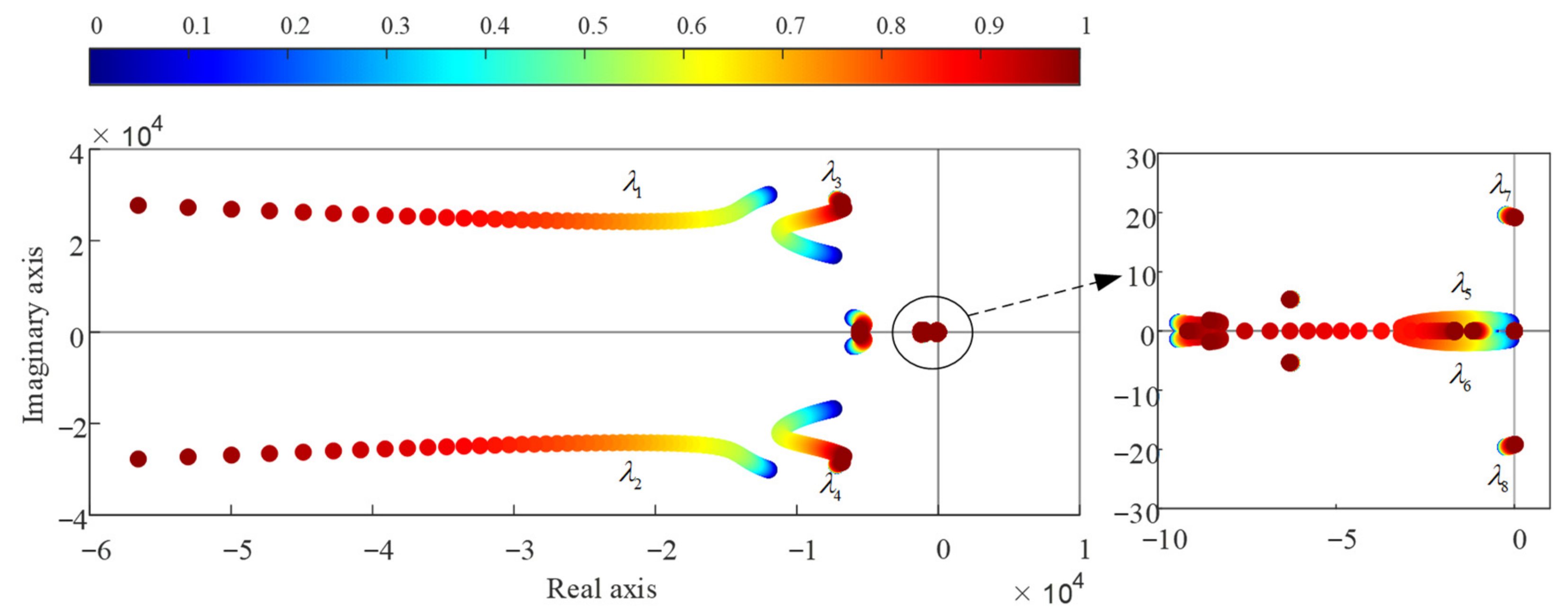
4.1. Discussion Analysis of Different Proportions of GFM Converter
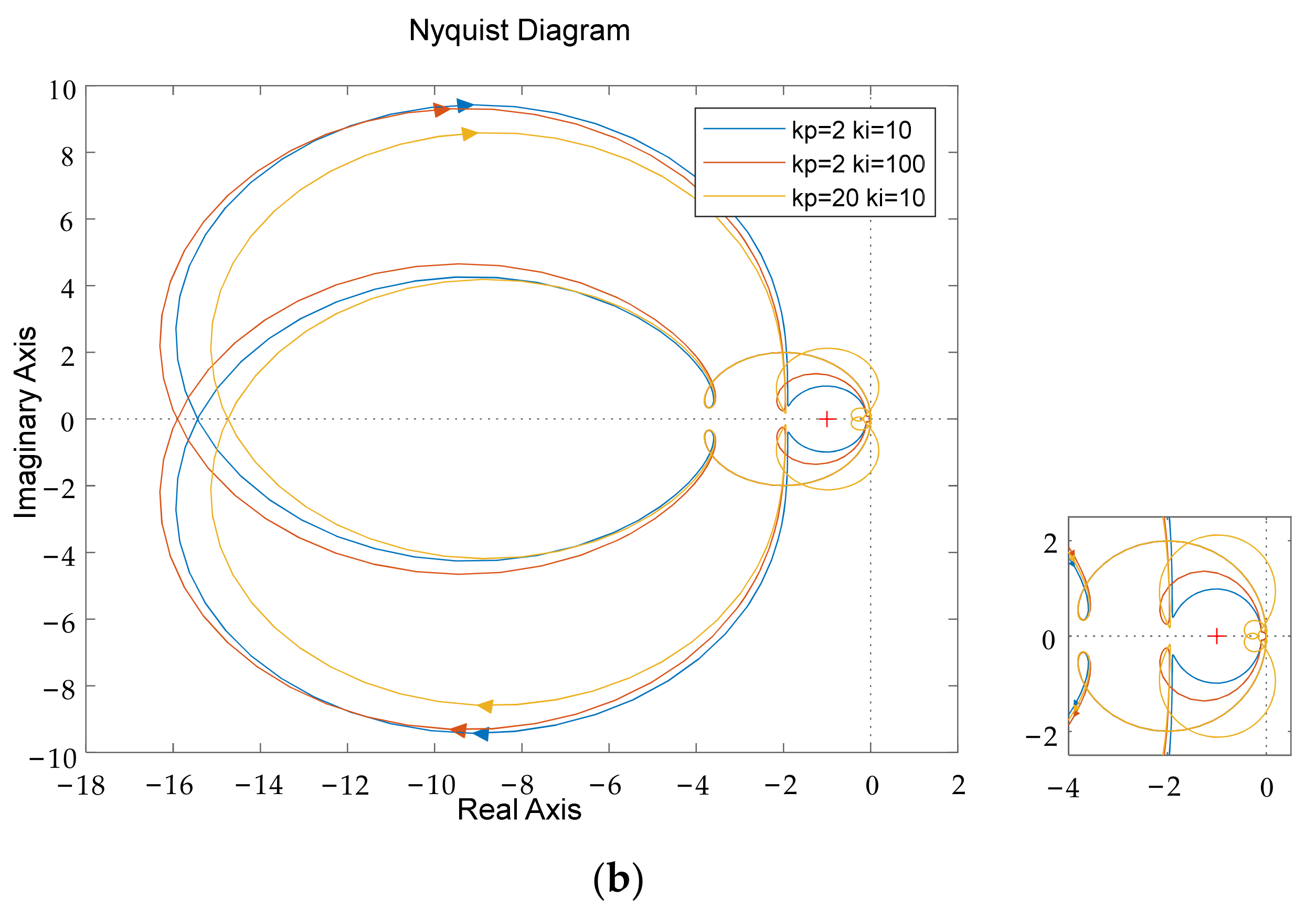
4.2. Discussion Analysis of Different Voltage Control Loop Parameters of GFM Converter
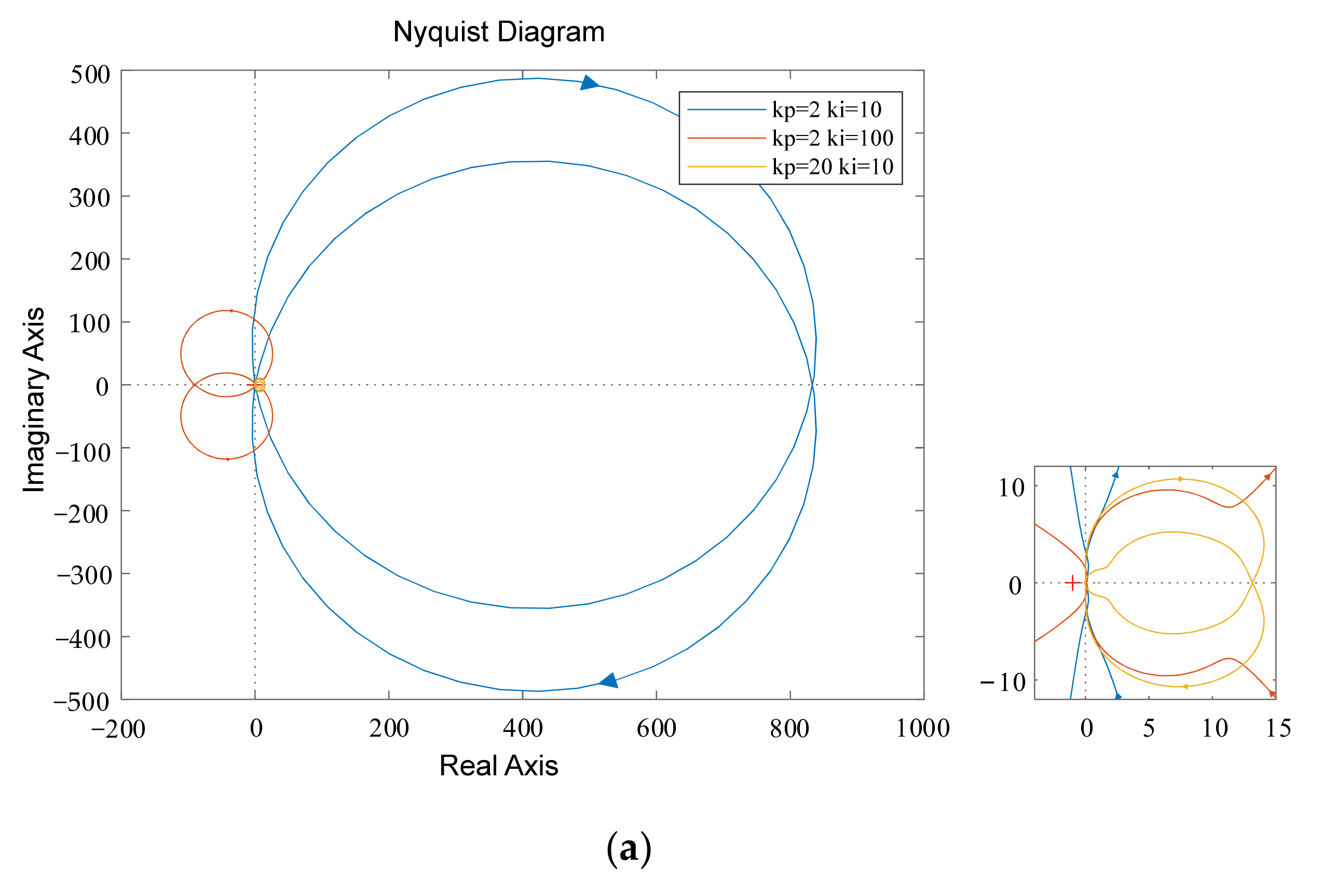
4.3. Discussion Analysis of Different Voltage Control Loop Parameters of GFL Converter
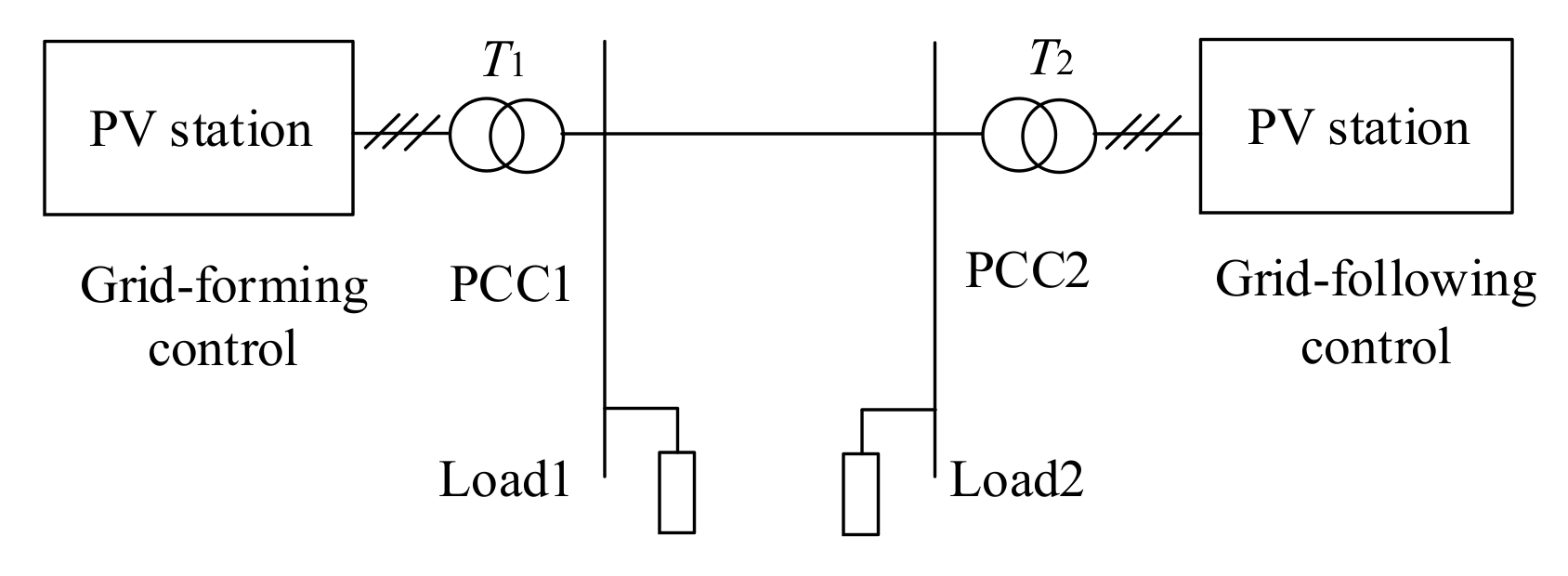
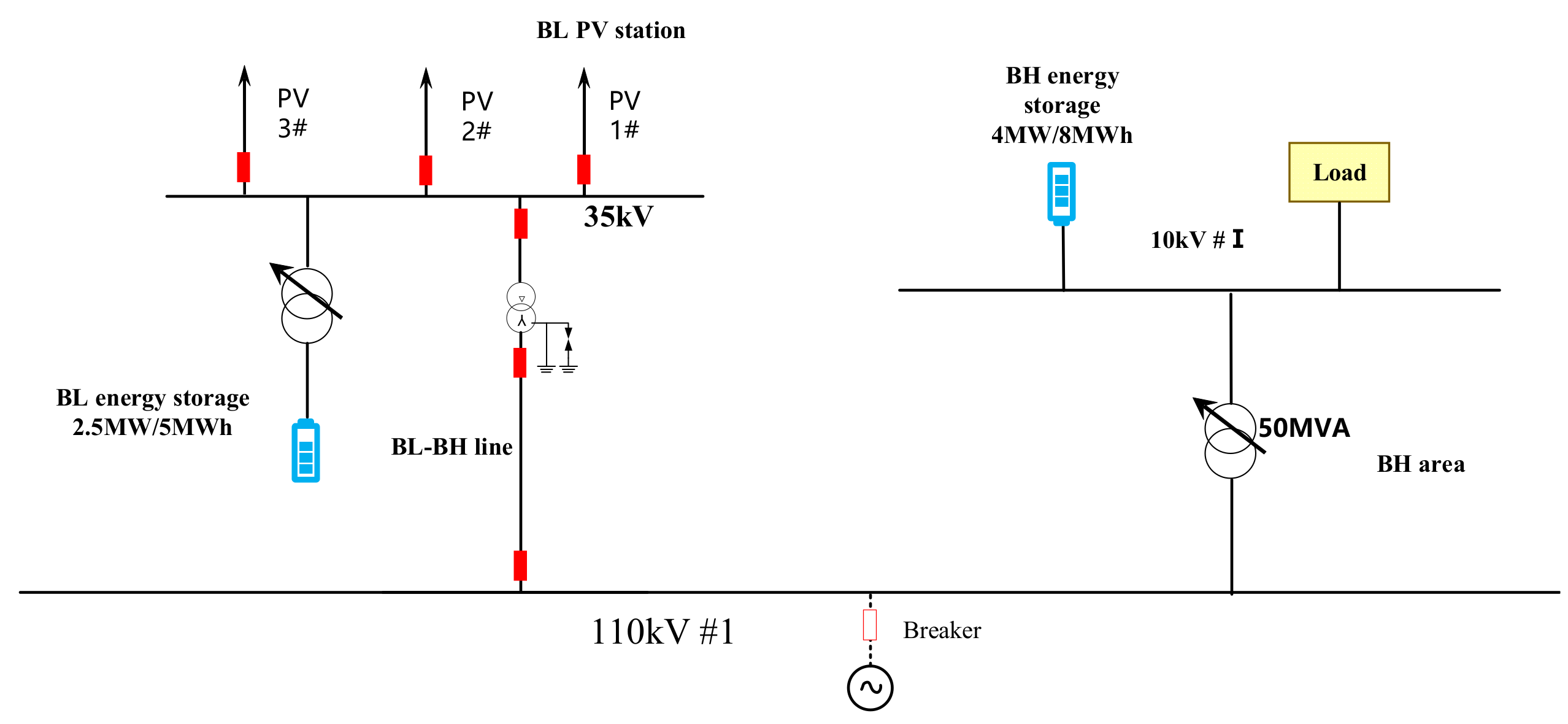
4.4. Engineering Case Study
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xie, X.; He, J.; Mao, H.; Li, H. New issues and classification of power system stability with high shares of renewables and power electronics. Proc. CSEE 2021, 41, 461–475. [Google Scholar]
- Xie, X.; Ma, N.; Liu, W.; Zhao, W.; Xu, P.; Li, H. Functions of energy storage in renewable energy dominated power systems: Review and prospect. Proc. CSEE 2023, 43, 158–169. [Google Scholar]
- Zhou, X.; Chen, S.; Lu, Z.; Huang, Y.; Ma, S.; Zhao, Q. Technology features of the new generation power system in China. Proc. CSEE 2018, 38, 1893–1904. [Google Scholar]
- Yuan, X.; Zhang, M.; Chi, Y.; Ju, P. Basic challenges of and technical roadmap to power-electronized power System Dynamics issues. Proc. CSEE 2022, 42, 1904–1917. [Google Scholar]
- Zhang, M.; Yuan, X.; Hu, J. Path series expansion method based on self-/en-stabilizing properties and its application in the stability analysis of power systems with diversified power electronic devices. Proc. CSEE 2021, 41, 1637–1654. [Google Scholar]
- Lu, Z.; Jiang, J.; Qiao, Y.; Min, Y.; Li, H. A review on generalized inertia analysis and optimization of new power systems. Proc. CSEE 2023, 43, 1754–1776. [Google Scholar]
- Wang, X.; Blaabjerg, F. Harmonic stability in power electronic-based power systems: Concept, modeling, and analysis. IEEE Trans. Smart Grid 2019, 10, 2858–2870. [Google Scholar] [CrossRef]
- Qin, X.; Su, L.; Chi, Y.; Guo, Q.; Xu, X. Functional orientation discrimination of inertia support and primary frequency regulation of virtual synchronous generator in large power grid. Autom. Electr. Power Syst. 2018, 42, 36–43. [Google Scholar]
- Shi, Z.; Wang, W.; Huang, Y.; Li, P.; Dong, L. Simultaneous optimization of renewable energy and energy storage capacity with the hierarchical control. CSEE J. Power Energy Syst. 2022, 8, 95–104. [Google Scholar]
- Li, X.; Yan, N.; Ma, R. Cooperative dispatch of distributed energy storage in distribution network with PV generation systems. IEEE Trans. Appl. Supercond. 2021, 31, 1–4. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the Inertia of Future More-Electronics Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2130–2146. [Google Scholar] [CrossRef]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Guo, J.; Ma, S.; Wang, T.; Jing, Y.; Hou, W.; Xu, H. Challenges of developing a power system with a high renewable energy proportion under China’s carbon targets. iEnergy 2022, 1, 12–18. [Google Scholar] [CrossRef]
- Cheng, Y.; Fan, L.; Rose, J.; Huang, S.H.; Schmall, J.; Wang, X.; Xie, X.; Shair, J.; Ramamurthy, J.R.; Modi, N.; et al. Real-world subsynchronous oscillation events in power grids with high penetrations of inverter-based resources. IEEE Trans. Power Syst. 2022, 38, 316–330. [Google Scholar] [CrossRef]
- Yuan, X.; Chen, S.; Hu, J. Multi-time scale voltage and power angle dynamics in power electronics dominated large power systems. Proc. CSEE 2016, 36, 5145–5154+5395. [Google Scholar]
- Hu, J.; Yuan, X.; Cheng, S. Multi-time scale transients in power-electronized power systems considering multi-time scale switching control schemes of power electronics apparatus. Proc. CSEE 2019, 39, 5457–5467. [Google Scholar]
- Vodapally, S.N.; Ali, M.H. Overview of Intelligent Inverters and Associated Cybersecurity Issues for a Grid-Connected Solar Photovoltaic System. Energies 2023, 16, 5904. [Google Scholar] [CrossRef]
- Du, W.; Tuffner, F.K.; Schneider, K.P.; Lasseter, R.H.; Xie, J.; Chen, Z.; Bhattarai, B. Modeling of Grid-Forming and Grid-Following Inverters for Dynamic Simulation of Large-Scale Distribution Systems. IEEE Trans. Power Deliv. 2021, 36, 2035–2045. [Google Scholar] [CrossRef]
- Li, Y.; Gu, Y.; Green, T.C. Revisiting Grid-Forming and Grid-Following Inverters: A Duality Theory. IEEE Trans. Power Syst. 2022, 37, 4541–4554. [Google Scholar] [CrossRef]
- Beck, H.; Hesse, R. Virtual synchronous machine. In Proceedings of the 9th International Conference on Electrical Power Quality and Utilisation, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Zhong, Q.; WEISS, Q. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Johnson, B.B.; Sinha, M.; Ainsworth, N.G.; Dörfler, F.; Dhople, S.V. Synthesizing virtual oscillators to control islanded inverters. IEEE Trans. Power Electron. 2016, 31, 6002–6015. [Google Scholar] [CrossRef]
- Unruh, P.; Nuschke, M.; Strauß, P.; Welck, F. Overview on Grid-Forming Inverter Control Methods. Energies 2020, 13, 2589. [Google Scholar] [CrossRef]
- Hu, P.; Jiang, K.; Ji, X.; Cai, Y.; Wang, B.; Liu, D.; Cao, K.; Wang, W. A Novel Grid-Forming Strategy for Self-Synchronous PMSG under Nearly 100% Renewable Electricity. Energies 2023, 16, 6648. [Google Scholar] [CrossRef]
- Sun, Z.; Zhu, F.; Cao, X. Study on a Frequency Fluctuation Attenuation Method for the Parallel Multi-VSG System. Front. Energy Res. 2021, 9, 693878. [Google Scholar] [CrossRef]
- Shang, L.; Hu, J.B.; Yuan, X.M.; Chi, Y.; Tang, H. Modeling and improved control of virtual synchronous generators under symmet-rical faults of grid. Proc. CSEE 2017, 37, 403–411. [Google Scholar]
- Zheng, T.; Wang, Z.; Zhou, F.; Wang, H. Fault current calculation and influencing factors analysis of virtual synchronous generator under symmetrical short circuit fault. Power Syst. Technol. 2023, 47, 1460–1475. [Google Scholar]
- Hu, P.; Jiang, K.; Ji, X.; Tan, D.; Liu, D.; Cao, K.; Wang, W. A Novel Grid-Forming Strategy for Voltage-Source Controlled PV under Nearly 100% Renewable Electricity. Front. Energy Res. 2022, 10, 915763. [Google Scholar] [CrossRef]
- Holttinen, H.; Kiviluoma, J.; Helisto, N.; Levy, T.; Menemenlis, N.; Jun, L.; Cutululis, N.; Koivisto, M.; Das, K.; Orths, A.; et al. Design and Operation of Energy Systems with Large Amounts of Variable Generation: Final Summary Report. IEA Wind TCP Task 25; VTT Technical Research Centre of Finland: Espoo, Finland, 2021. [Google Scholar] [CrossRef]
- Zhang, C.; Wu, H.; Wang, X. An Overview of Stability Studies of Grid-forming Voltage-source Converters. Proc. CSEE 2023, 43, 2339–2359. [Google Scholar]
- Zhang, Y.; Huang, J.; Schmall, J.; Conto, J.; Billo, J.; Rehman, E. Evaluating system strength for large-scale wind plant integration. In Proceedings of the 2014 IEEE PES General Meeting, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Schramm Dall’Asta, M.; Brunelli Lazzarin, T. Small-Signal Modeling and Stability Analysis of a Grid-Following Inverter with Inertia Emulation. Energies 2023, 16, 5894. [Google Scholar] [CrossRef]
- Ilyushin, Y.V.; Kapostey, E.I. Developing a Comprehensive Mathematical Model for Aluminium Production in a Soderberg Electrolyser. Energies 2023, 16, 6313. [Google Scholar] [CrossRef]
- Pershin, I.M.; Papush, E.G.; Kukharova, T.V.; Utkin, V.A. Modeling of Distributed Control System for Network of Mineral Water Wells. Water 2023, 15, 2289. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, X.; Liu, F.; Shi, R.; Yu, C.; Cao, R. A Reactive Power Sharing Strategy of VSG Based on Virtual Capacitor Algorithm. IEEE Trans. Ind. Electron. 2017, 64, 7520–7531. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, X.; Hu, J.; Zhou, P. Modeling of VSC Connected to Weak Grid for Stability Analysis of DC-Link Voltage Control. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 1193–1204. [Google Scholar] [CrossRef]
- Rosso, R.; Wang, X.; Liserre, M.; Lu, X.; Engelken, S. Grid-forming converters: Control approaches, grid-synchronization, and future trends-a review. IEEE Open J. Ind. Appl. 2021, 2, 93–109. [Google Scholar] [CrossRef]
- Xu, J.; Liu, W.; Liu, S.; Chang, F.; Xie, X. Current state and development trends of power system converter grid-forming control technology. Power Syst. Technol. 2021, 46, 3586–3594. [Google Scholar]
- Zhang, H.; Wang, X.; Lin, W.; Wen, J. Grid forming converters in renewable energy sources dominated power grid: Control strategy, stability, application, and challenges. J. Mod. Power Syst. Clean Energy 2021, 9, 1239–1256. [Google Scholar] [CrossRef]
- ENTSO-E. High Penetration of Power Electronic Interfaced Power Sources and the Potential Contribution of Grid Forming Converters; ENTSO-E: Brussels, Belgium, 2020. [Google Scholar]
- National Grid ESO. Minimum Specification Required for Provision of GB Grid Forming (GBGF) Capability (Formerly Virtual Synchronous Machine/VSM Capability); National Grid ESO: Warwick, UK, 2021. [Google Scholar]
- Huang, L.; Xin, H.; Wang, Z. Damping low-frequency oscillations through VSC-HVdc stations operated as virtual synchronous machines. IEEE Trans. Power Electron. 2019, 34, 5803–5818. [Google Scholar] [CrossRef]
- Liu, N.; Zhang, C.; Liao, L.; Chen, X.; Chen, S. Analysis on virtual torque and oscillation instability mechanism of virtual synchronous generator with reactive power-voltage controller. Autom. Electr. Power Syst. 2019, 43, 107–115. [Google Scholar]
- Ma, Y.; Yang, H.; Qu, Z.; Xin, H.; Han, J. Design method for improving damping characteristics of virtual synchronous generator. Power Syst. Technol. 2021, 45, 269–275. [Google Scholar]
- Zhang, X.; Zhang, C. PWM Rectifier and Its Control; China Machine Press: Beijing, China, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| PI1 (kvdp/kvdi) | 3.5/5 |
| PI2 (kvqp/kvqi) | 3.5/5 |
| PI3 (kvidp/kvidi) | 1/10 |
| PI4 (kviqp/kviqi) | 1/10 |
| PI5 (klvdp/klvdi) | 5/50 |
| PI6 (klvqp/klvqi)) | 1/10 |
| PI7 (kidp/kidi) | 2/200 |
| PI8 (kiqp/kiqi) | 6/100 |
| PIPLL (kPLLp/kPLLi) | 10/200 |
| J | 4 |
| D | 100 |
| Dq | 100 |
| Eigenvalue | f | Participation Factor (>0.1) |
|---|---|---|
| 0.0059 ± 1.2i | 0.19 Hz | ; ; |
| Eigenvalue | f | Participation Factor (>0.1) |
|---|---|---|
| 0.0145 ± 19.17i | 3.05 Hz | ; |
| Eigenvalue | f | Participation Factor (>0.1) |
|---|---|---|
| 2.12 ± 190i | 30.24 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, K.; Liu, D.; Cao, K.; Xiong, P.; Ji, X. Small-Signal Modeling and Configuration Analysis of Grid-Forming Converter under 100% Renewable Electricity Systems. Electronics 2023, 12, 4078. https://doi.org/10.3390/electronics12194078
Jiang K, Liu D, Cao K, Xiong P, Ji X. Small-Signal Modeling and Configuration Analysis of Grid-Forming Converter under 100% Renewable Electricity Systems. Electronics. 2023; 12(19):4078. https://doi.org/10.3390/electronics12194078
Chicago/Turabian StyleJiang, Kezheng, Dan Liu, Kan Cao, Ping Xiong, and Xiaotong Ji. 2023. "Small-Signal Modeling and Configuration Analysis of Grid-Forming Converter under 100% Renewable Electricity Systems" Electronics 12, no. 19: 4078. https://doi.org/10.3390/electronics12194078
APA StyleJiang, K., Liu, D., Cao, K., Xiong, P., & Ji, X. (2023). Small-Signal Modeling and Configuration Analysis of Grid-Forming Converter under 100% Renewable Electricity Systems. Electronics, 12(19), 4078. https://doi.org/10.3390/electronics12194078