
Enhancing Swarm Intelligence for Obstacle Avoidance with Multi-Strategy and Improved Dung Beetle Optimization Algorithm in Mobile Robot Navigation


Abstract
:1. Introduction
2. Methods
2.1. Dung Beetle Optimization (DBO) Algorithm
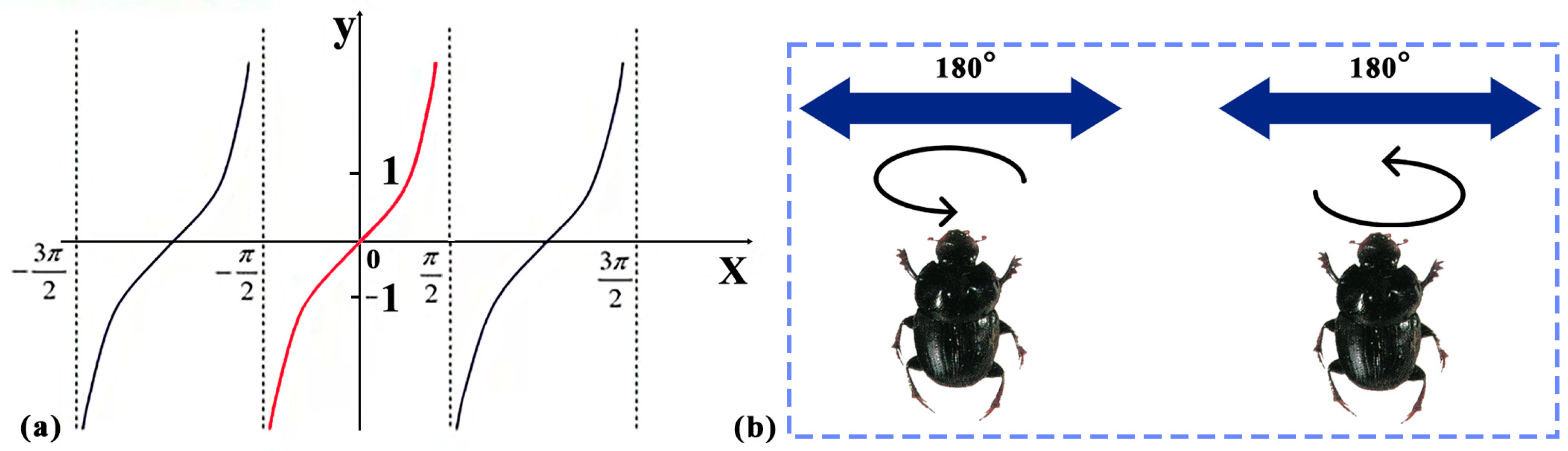
2.1.1. Roller Beetle
2.1.2. Dancing Behavior
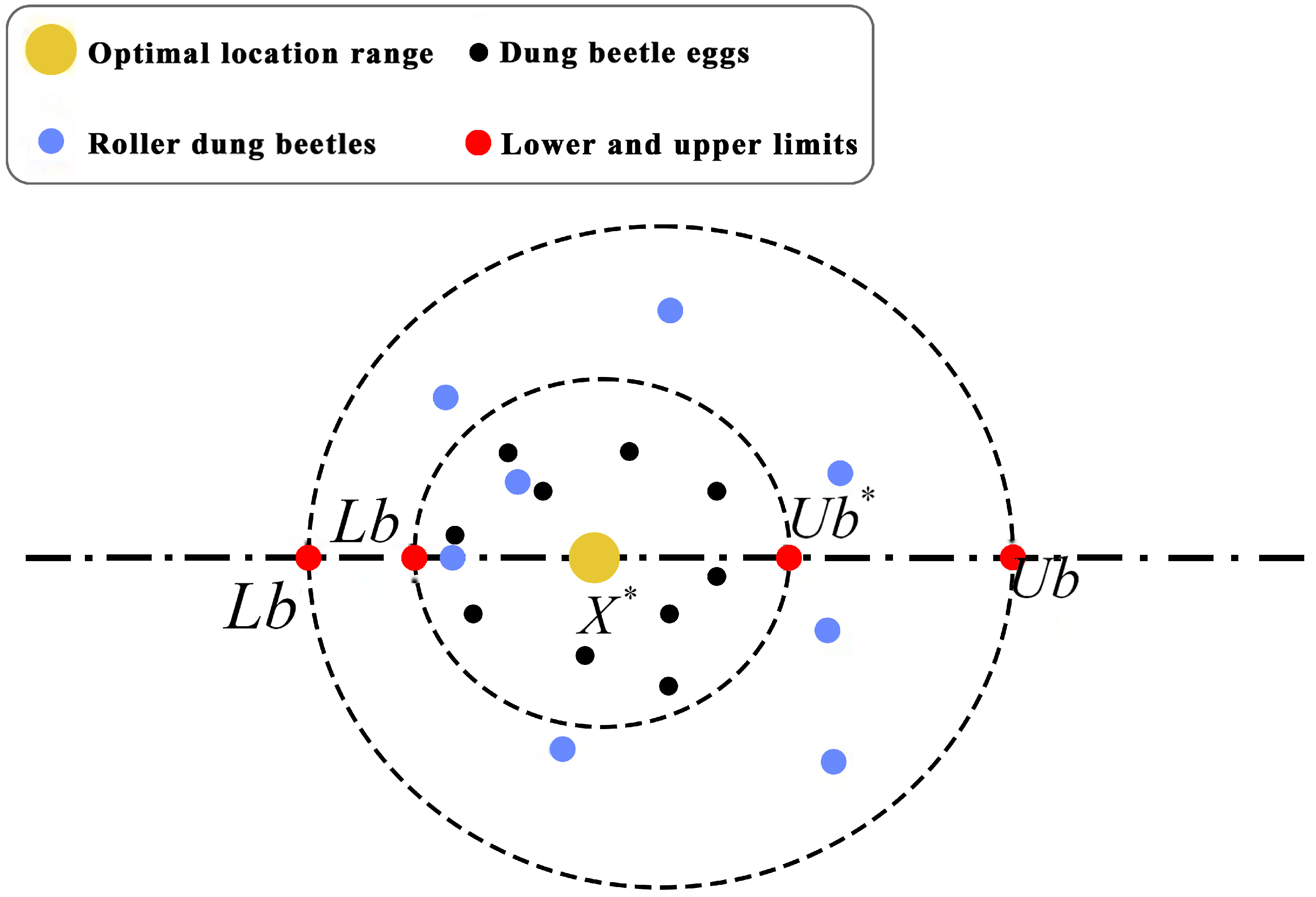
2.1.3. Dung Beetle Reproduction
2.1.4. Minor Dung Beetle
2.1.5. Thieving Dung Beetle
2.2. Multi-Strategy and Improved Dung Beetle Optimization (MSIDBO) Algorithm
2.2.1. Random Backward Learning Strategy
2.2.2. Fitness-Distance Balancing (FDB) Strategy
2.2.3. Spiral Foraging Strategy
2.2.4. Optimal Per-Dimension Gaussian Mutation Strategy
2.3. The Proposed Algorithm Flowchart
- Step 1:
- Set the percentage of producers (P_percent) in the population.
- Step 2:
- Calculate the population size of producers (pNum) based on P_percent and the total population size (pop).
- Step 3:
- Initialize lower bounds (Lb) and upper bounds (Ub) for each dimension.
- Step 4:
- Initialize the population (x) by randomly selecting grid positions within the bounds.
- Step 5:
- Evaluate fitness (fit) for each solution in the population.
- Step 6:
- Set personal best fitness values (pFit) and positions (pX) as the initial fitness values and positions.
- Step 7:
- Set the current global best fitness value (fMin) and position (bestX) as the minimum fitness value and corresponding position from pFit and pX, respectively.
- Step 8:
- Start updating the solutions for M iterations: (a) Update a subset of fireflies based on random values and conditions. (b) Apply bounds to the updated solutions. (c) Evaluate fitness for the updated solutions. (d) Determine the current best fitness value (fMMin) and position (bestXX). (e) Update another subset of solutions using Spiral Foraging and FDB Strategy. (f) Apply bounds to the updated solutions. (g) Evaluate fitness for the updated solutions. (h) Update the individual’s best fitness value and global best fitness value if necessary. (i) Random reverse learning and Gaussian mutation to the best solution. (j) Store the best fitness value in the Convergence_curve array.
- Step 9:
- Termination condition: If the maximum number of iterations (M) is reached, go to step 10. Otherwise, go back to step 8.
- Step 10:
- Return the global best fitness value (fMin), corresponding position (bestX), and Convergence_curve array.

3. Simulation Experiment Analysis
3.1. Experiment Environment Simulation
3.2. Experimental Design
3.3. Benchmark Test Functions
3.4. Comparative Analysis with Other Swarm Intelligence Algorithms
3.5. Effectiveness Analysis of Improvement Strategies
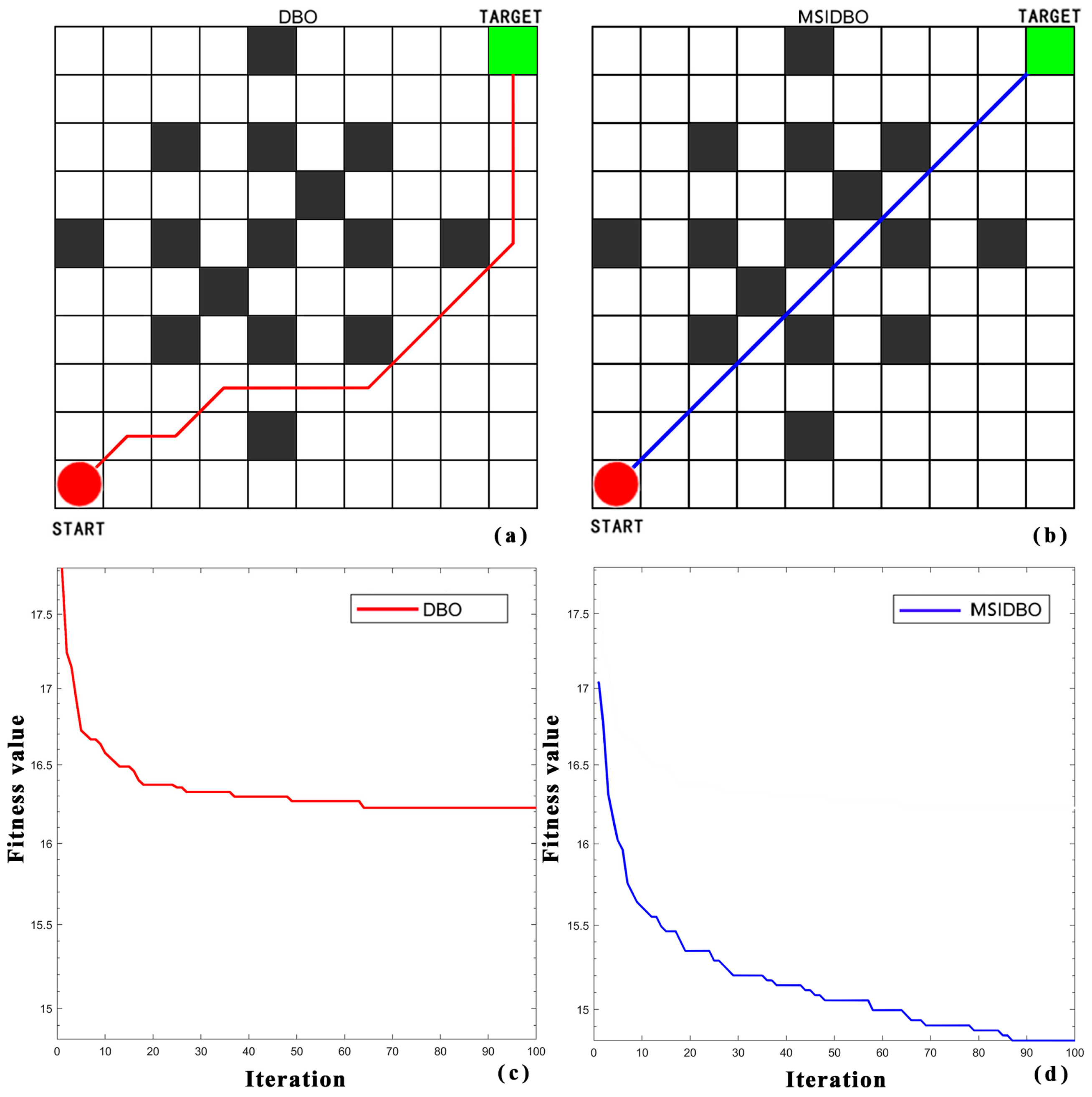
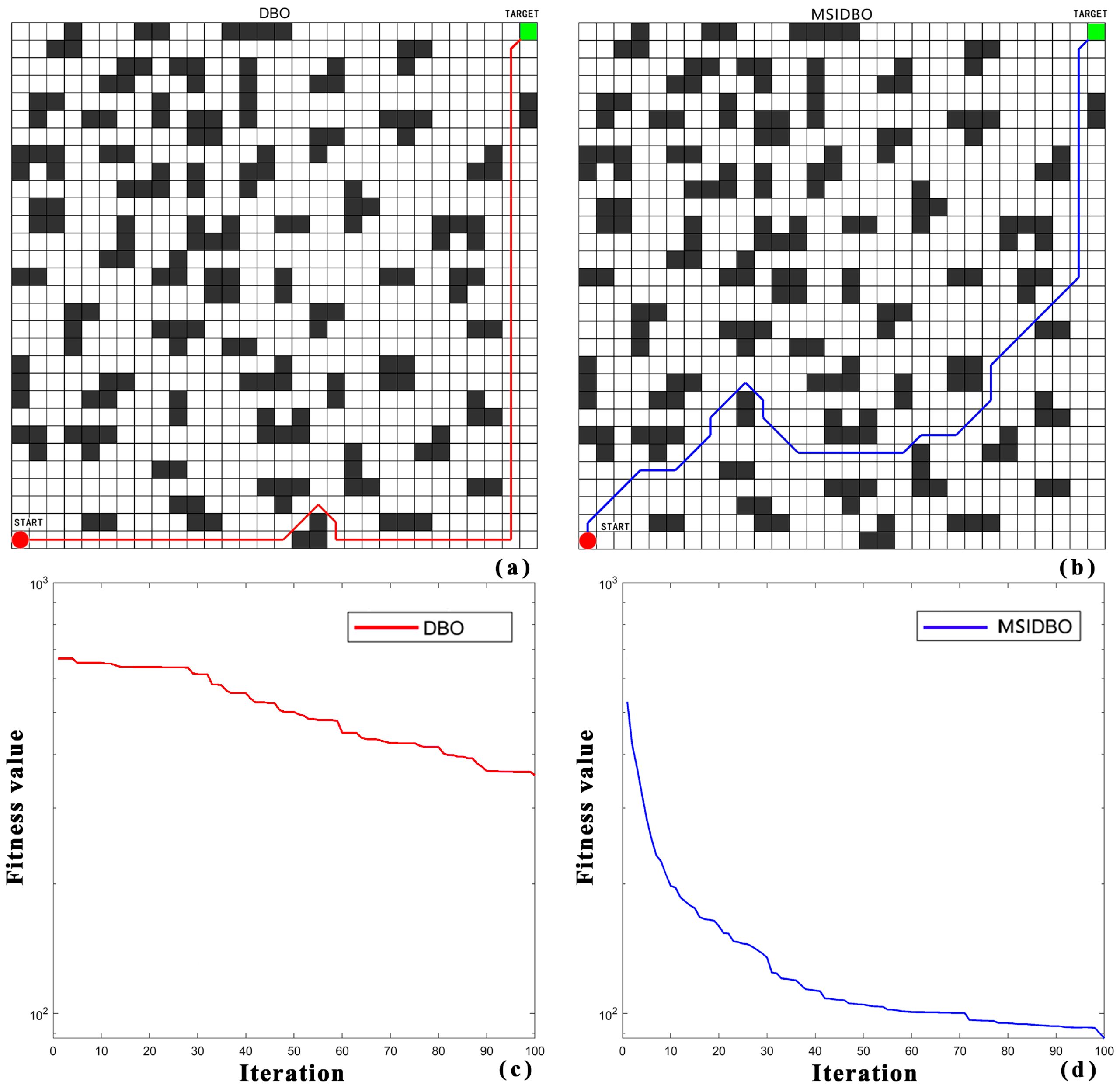
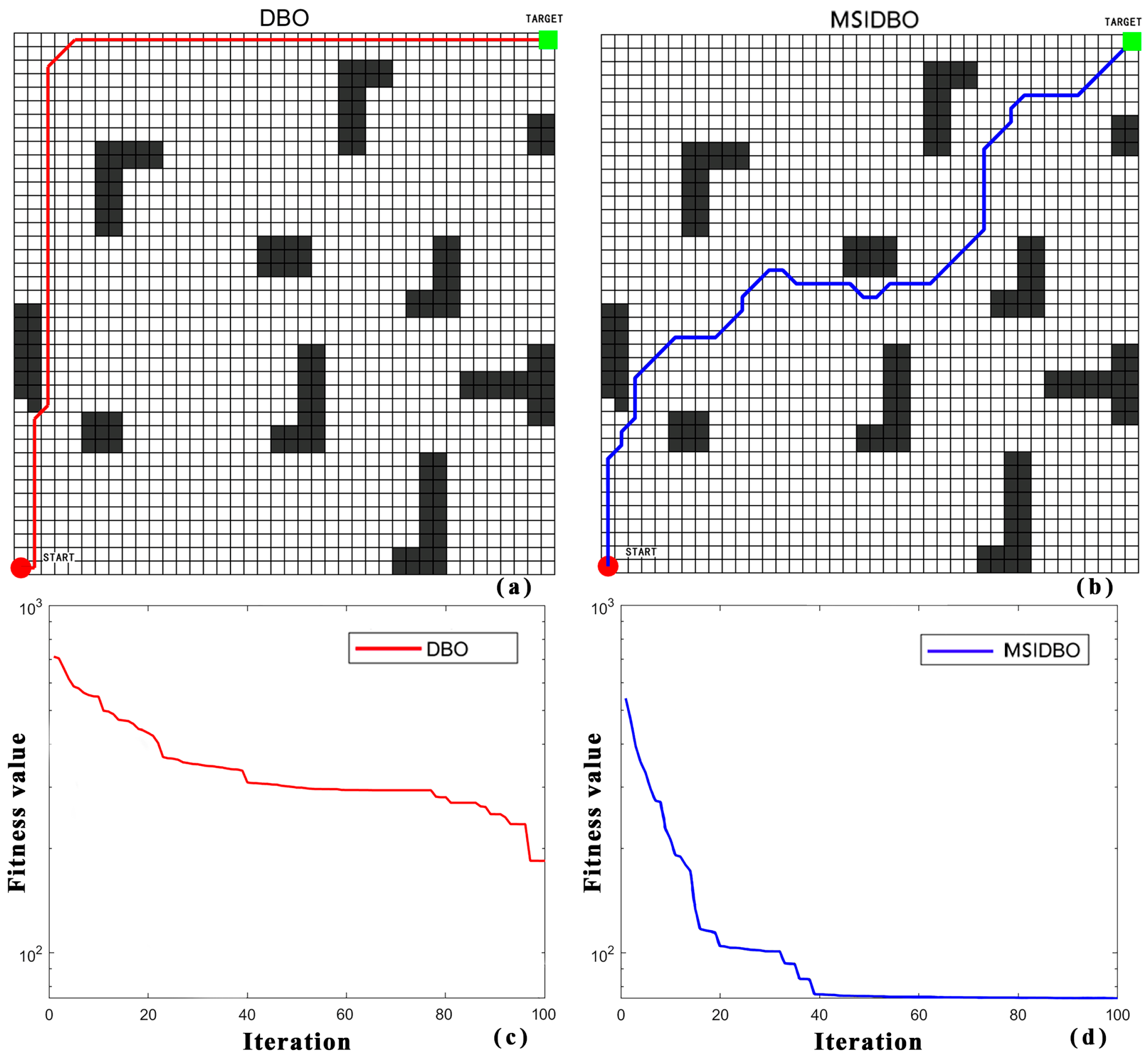
4. Simulation and Validation of Path Planning Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, S.; Hong, Z. Unexpected Dynamic Obstacle Monocular Detection in the Driver View. IEEE Intell. Transp. Syst. Mag. 2022, 15, 68–81. [Google Scholar] [CrossRef]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, A. UAV path planning using optimization approaches: A survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X.; Wang, C. Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments. J. Intell. Robot. Syst. 2020, 98, 297–309. [Google Scholar] [CrossRef]
- Puente-Castro, A.; Rivero, D.; Pazos, A.; Fernandez-Blanco, E. A review of artificial intelligence applied to path planning in UAV swarms. Neural Comput. Appl. 2022, 34, 153–170. [Google Scholar] [CrossRef]
- Yao, Q.; Zheng, Z.; Qi, L. Path planning method with improved artificial potential field—A reinforcement learning perspective. IEEE Access 2020, 8, 135513–135523. [Google Scholar] [CrossRef]
- Kandathil, J.J.; Mathew, R.; Hiremath, S.S. Development and analysis of a novel obstacle avoidance strategy for a multi robot system inspired by the bug-1 algorithm. Simulation 2020, 96, 807–824. [Google Scholar] [CrossRef]
- Huang, S.K.; Wang, W.J.; Sun, C.H. A Path Planning Strategy for Multi-Robot Moving with Path-Priority Order Based on a Generalized Voronoi Diagram. Appl. Sci. 2021, 11, 9650. [Google Scholar] [CrossRef]
- Alshammrei, S.; Boubaker, S. Improved Dijkstra Algorithm for Mobile Robot Path Planning and Obstacle Avoidance. Comput. Mater. Contin. 2022, 72, 5939–5954. [Google Scholar] [CrossRef]
- Ma, X.; Gong, R.; Tan, Y. Path planning of mobile robot based on improved PRM based on cubic spline. Wirel. Commun. Mob. Comput. 2022, 2022, 1632698. [Google Scholar] [CrossRef]
- Kang, J.G.; Lim, D.W.; Choi, Y.S. Improved RRT-Connect Algorithm Based on Triangular Inequality for Robot Path Planning. Sensors 2021, 21, 333. [Google Scholar] [CrossRef]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.H. Neural RRT*: Learning-based optimal path planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Chi, W.; Ding, Z.; Wang, J.; Chen, G.; Sun, L. A generalized Voronoi diagram-based efficient heuristic path planning method for RRTs in mobile robots. IEEE Trans. Ind. Electron. 2021, 69, 4926–4937. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Patle, B.K.; Pandey, A.; Parhi, D.R.K.; Jagadeesh, A.J.D.T. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Dewang, H.S. A smart path planner for wheeled mobile robots using adaptive particle swarm optimization. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 101. [Google Scholar] [CrossRef]
- Wu, L.; Huang, X.; Cui, J. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot. Expert Syst. Appl. 2023, 215, 119410. [Google Scholar] [CrossRef]
- Ge, H.; Ying, Z.; Chen, Z. Improved A* Algorithm for Path Planning of Spherical Robot Considering Energy Consumption. Sensors 2023, 23, 7115. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, E. An improved sparrow search based intelligent navigational algorithm for local path planning of mobile robot. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 14111–14123. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, H.; Xu, Y.; Xiong, G.; Zeng, C. Isokinetic Rehabilitation Trajectory Planning of an Upper Extremity Exoskeleton Rehabilitation Robot Based on a Multistrategy Improved Whale Optimization Algorithm. Symmetry 2023, 15, 232. [Google Scholar] [CrossRef]
- Gao, L.; Liu, R.; Wang, F. An Advanced Quantum Optimization Algorithm for Robot Path Planning. J. Circuits Syst. Comput. 2020, 29, 2050122. [Google Scholar] [CrossRef]
- Hong, K.R.; Park, J.K.; Kim, U.C. Rao-combined artificial bee colony algorithm for minimum dose path planning in complex radioactive environments. Nucl. Eng. Des. 2022, 400, 112043. [Google Scholar] [CrossRef]
- Li, Y.; Wang, G. Sand cat swarm optimization based on stochastic variation with elite collaboration. IEEE Access 2022, 10, 89989–90003. [Google Scholar] [CrossRef]
- Jiang, S.; Yao, W.; Wong, M.S.; Hang, M.; Hong, Z.; Kim, E.J. Automatic elevator button localization using a combined detecting and tracking framework for multi-story navigation. IEEE Access 2019, 8, 1118–1134. [Google Scholar] [CrossRef]
- Dong, L.; Yuan, X.; Yan, B. An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning. Sensors 2022, 22, 6843. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Hu, Q.; Liu, J. Path Planning of Mobile Robot Based on Improved Multiobjective Genetic Algorithm. Wirel. Commun. Mob. Comput. 2021, 2021, 8881684. [Google Scholar] [CrossRef]
- Zhu, F.; Li, G.; Tang, H. Dung beetle optimization algorithm based on quantum computing and multi-strategy fusion for solving engineering problems. Expert Syst. Appl. 2023, 236, 121219. [Google Scholar] [CrossRef]
- Zhang, R.; Zhu, Y. Predicting the Mechanical Properties of Heat-Treated Woods Using Optimization-Algorithm-Based BPNN. Forests 2023, 14, 935. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, L.; Yang, S. A quasi-oppositional learning of updating quantum state and Q-learning based on the dung beetle algorithm for global optimization. Alex. Eng. J. 2023, 81, 469–488. [Google Scholar] [CrossRef]
- Shen, Q.; Zhang, D.; Xie, M. Multi-Strategy Enhanced Dung Beetle Optimizer and Its Application in Three-Dimensional UAV Path Planning. Symmetry 2023, 15, 1432. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]
- Jin, H.; Ji, H.; Yan, F. An Effective Obstacle Avoidance and Motion Planning Design for Underwater Telescopic Arm Robots Based on a Tent Chaotic Dung Beetle Algorithm. Electronics 2023, 12, 4128. [Google Scholar] [CrossRef]
- Qin, L.; Li, T.; Shi, M. Internal leakage rate prediction and unilateral and bilateral internal leakage identification of ball valves in the gas pipeline based on pressure detection. Eng. Fail. Anal. 2023, 153, 107584. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, H.; Wang, R. Low-Carbon and Energy-Saving Path Optimization Scheduling of Material Distribution in Machining Shop Based on Business Compass Model. Processes 2023, 11, 1960. [Google Scholar] [CrossRef]
- Wu, C.; Fu, J.; Huang, X.; Xu, X.; Meng, J. Lithium-Ion Battery Health State Prediction Based on VMD and DBO-SVR. Energies 2023, 16, 3993. [Google Scholar] [CrossRef]
- Zhu, X.; Ni, C.; Chen, G.; Guo, J. Optimization of Tungsten Heavy Alloy Cutting Parameters Based on RSM and Reinforcement Dung Beetle Algorithm. Sensors 2023, 23, 5616. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Qin, X.; Zhang, Q.; Zhang, Y.; Wang, P.; Fan, Z. Speaker Recognition Based on Dung Beetle Optimized CNN. Appl. Sci. 2023, 13, 9787. [Google Scholar] [CrossRef]
- Zilong, W.; Peng, S. A Multi-Strategy Dung Beetle Optimization Algorithm for Optimizing Constrained Engineering Problems. IEEE Access 2023, 11, 98805–98817. [Google Scholar] [CrossRef]
- Dong, Y.H.; Yu, Z.C.; Hu, T.Y. Inversion of Rayleigh wave dispersion curve based on improved dung beetle optimizer algorithm. Pet. Geol. Recovery Effic. 2023, 30, 86–97. [Google Scholar]
- Alamgeer, M.; Alruwais, N.; Alshahrani, H.M. Dung Beetle Optimization with Deep Feature Fusion Model for Lung Cancer Detection and Classification. Cancers 2023, 15, 3982. [Google Scholar] [CrossRef]
- Mohapatra, S.; Mohapatra, P. Fast random opposition-based learning Golden Jackal Optimization algorithm. Knowl.-Based Syst. 2023, 275, 110679. [Google Scholar] [CrossRef]
- Ali, M.A.S.; PP, F.R.; Salama Abd Elminaam, D. A Feature Selection Based on Improved Artificial Hummingbird Algorithm Using Random Opposition-Based Learning for Solving Waste Classification Problem. Mathematics 2022, 10, 2675. [Google Scholar] [CrossRef]
- Balakrishnan, K.; Dhanalakshmi, R.; Mahadeo Khaire, U. Excogitating marine predators algorithm based on random opposition-based learning for feature selection. Concurr. Comput. Pract. Exp. 2022, 34, e6630. [Google Scholar] [CrossRef]
- Kahraman, H.T.; Aras, S.; Gedikli, E. Fitness-distance balance (FDB): A new selection method for meta-heuristic search algorithms. Knowl.-Based Syst. 2020, 190, 105169. [Google Scholar] [CrossRef]
- Wang, K.; Tao, S.; Wang, R.L. Fitness-distance balance with functional weights: A new selection method for evolutionary algorithms. IEICE Trans. Inf. Syst. 2021, 104, 1789–1792. [Google Scholar] [CrossRef]
- Tasci, D.A.; Kahraman, H.T.; Kati, M. Improved Gradient-Based Optimizer with Dynamic Fitness Distance Balance for Global Optimization Problems. Smart Appl. Adv. Mach. Learn. Hum.-Centred Probl. Des. 2023, 1, 247. [Google Scholar]
- Li, X.; Yang, Q.; Wu, H. Joints Trajectory Planning of Robot Based on Slime Mould Whale Optimization Algorithm. Algorithms 2022, 15, 363. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Hao, W.K.; Wang, J.S. Manta ray foraging optimization algorithm with mathematical spiral foraging strategies for solving economic load dispatching problems in power systems. Alex. Eng. J. 2023, 70, 613–640. [Google Scholar] [CrossRef]
- Yang, C.; Yang, H.; Zhu, D. Chaotic sparrow search algorithm with manta ray spiral foraging for engineering optimization. Syst. Sci. Control Eng. 2023, 11, 2249021. [Google Scholar] [CrossRef]
- Song, S.; Wang, P.; Heidari, A.A. Dimension decided Harris hawks optimization with Gaussian mutation: Balance analysis and diversity patterns. Knowl.-Based Syst. 2021, 215, 106425. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Y.; Yu, C. Gaussian mutational chaotic fruit fly-built optimization and feature selection. Expert Syst. Appl. 2020, 141, 112976. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, P.; Heidari, A.A. Spiral Gaussian mutation sine cosine algorithm: Framework and comprehensive performance optimization. Expert Syst. Appl. 2022, 209, 118372. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter Variables |
|---|---|
| MSIDBO | Deviation coefficient K = 0.1, random number b = 0.3, c = 0.5 |
| DBO | Deviation coefficient K = 0.1, random number b = 0.3, c = 0.5 |
| GA | Maximum possible mutation probability , Minimum possible mutation probability |
| GWO | Convergence factor a linearly decreasing from 2 to 0 during iterations |
| MFO | Path coefficient , Variable r linearly decreases from −1 to −2 |
| PSO | Learning factor C1 = C2 = 2, Initial inertia weight , Inertia weight at maximum evolution iteration |
| WOA | Random number for position iteration update |
| Functions | Dim | Domain | Global Opt |
|---|---|---|---|
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | |||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 50 | 0 | ||
| 2 | 1 | ||
| 4 | 0.0003 | ||
| 6 | −3.32 | ||
| 4 | −10.1532 | ||
| 4 | −10.4028 | ||
| 4 | −10.5363 |
| Function Name | Metric | GA | GWO | MFO | PSO | WOA | DBO | MSIDBO |
|---|---|---|---|---|---|---|---|---|
| f1 | Worst | 4689.19 | 2.97 × 10−14 | 13,302.44 | 13.17405 | 341.625 | 4.1 × 10−53 | 0 |
| Best | 1.32 × 104 | 2.70 × 10−16 | 5.04 × 101 | 2.86 × 10 | 3.2 × 10−50 | 9.8 × 10−91 | 0 | |
| Average | 2.84 × 104 | 4.70 × 10−15 | 2.02 × 103 | 7.00 × 10 | 8.6 × 10−41 | 1.37 × 10−54 | 0 | |
| STD | 8.7 × 103 | 6.37 × 10−15 | 3.98 × 103 | 2.56 × 10 | 1.8 × 10−39 | 548 × 10−54 | 0 | |
| f2 | Worst | 83.8083 | 4.244 × 10−9 | 78.51766 | 13.82699 | 3.6 × 10−28 | 2.2 × 10−26 | 3.06 × 10−18 |
| Best | 45.97583 | 4.34 × 10−10 | 5.04619 | 5.64996 | 2.4 × 10−34 | 5.2 × 10−47 | 4.6 × 10−22 | |
| Average | 63.22056 | 1.50 × 10−9 | 35.05702 | 9.05261 | 1.8 × 10−29 | 7.2 × 10−28 | 1.1 × 10−184 | |
| STD | 9.13277 | 9.03 × 10−10 | 19.02526 | 1.96955 | 6.7 × 10−29 | 3.9 × 10−27 | 0 | |
| f3 | Worst | 96,369.82 | 0.51767 | 50,566.01 | 694.71 | 1003.13 | 1.4 × 10−7 | 0 |
| Best | 2.77 × 104 | 7.08 × 10−4 | 8.55 × 103 | 1.82 × 102 | 3.1 × 104 | 7.1 × 10−76 | 0 | |
| Average | 5.48 × 104 | 6.09 × 10−2 | 2.55 × 104 | 3.79 × 102 | 6.4 × 104 | 4.5 × 10−9 | 0 | |
| STD | 1.65 × 104 | 1.12 × 10−1 | 1.06 × 104 | 1.20 × 102 | 1.7 × 104 | 2.5 × 10−8 | 0 | |
| f4 | Worst | 86.705 | 0.0036 | 83.66176 | 3.2067 | 89.26 | 9.7 × 10−26 | 1.6 × 10−176 |
| Best | 55.594 | 0.00017 | 51.50126 | 1.7538 | 2.75654 | 3.4 × 10−45 | 7.1 × 10−218 | |
| Average | 73.431 | 0.00096 | 69.80423 | 2.4212 | 53.32 | 3.2 × 10−27 | 5.8 × 10−178 | |
| STD | 7.702 | 0.00077 | 7.991 | 0.3375 | 27.27 | 1.8 × 10−26 | 0 | |
| f5 | Worst | 1.33 × 108 | 28.80314 | 800,769 | 7165.925 | 28.81 | 28.066 | 26.0072 |
| Best | 885,829 | 26.10587 | 7674.538 | 869.1188 | 27.67 | 25.916 | 24.8950 | |
| Average | 453,698 | 27.40764 | 4,007,169 | 2655.264 | 28.42 | 26.444 | 25.4896 | |
| STD | 295,623 | 0.795043 | 17,096 | 1453.069 | 0.34 | 0.4412 | 0.2755 | |
| f6 | Worst | 46,613.69 | 1.8684 | 15,289.42 | 14.1803 | 1.7597 | 0.36367 | 2.09 × 10−5 |
| Best | 1.19 × 104 | 2.05 × 10−1 | 5.50 × 101 | 2.99 × 10 | 2.8 × 10−1 | 1.8 × 10−3 | 2.46 × 10−7 | |
| Average | 2.76 × 104 | 1.01 × 10 | 2.29 × 103 | 6.95 × 10 | 8.7 × 10−1 | 5.8 × 10−2 | 2.70 × 10−6 | |
| STD | 8.63 × 103 | 4.06 × 10−1 | 4.45 × 103 | 2.63 × 10 | 3.6 × 10−1 | 9.9 × 10−2 | 4.14 × 10−6 | |
| f7 | Worst | 54.34306 | 0.009334 | 24.65711 | 94.56221 | 0.0271 | 0.0079 | 0.00059 |
| Best | 5.20 × 10 | 1.07 × 10−3 | 1.71 × 10−1 | 8.86 × 10 | 2.4 × 10−4 | 1.8 × 10−4 | 8.89 × 10−6 | |
| Average | 21.60095 | 0.003818 | 3.049197 | 37.29864 | 0.0060 | 0.0021 | 0.00016 | |
| STD | 12.37277 | 0.001928 | 5.733577 | 21.47601 | 0.0067 | 0.0019 | 0.00014 | |
| f8 | Worst | −1290.93 | −3474.61 | −6702.6 | −2963.57 | −7243.31 | −6060.32 | −2 × 1010 |
| Best | −3387.99 | −7725.31 | −10,229.3 | −7818.69 | −12,565.2 | −11,415.9 | −3 × 1012 | |
| Average | −2160.87 | −5955.99 | −8484.38 | −5438.12 | −9912.5 | −7973.58 | −3 × 1011 | |
| STD | 523.1186 | 922.7797 | 890.5712 | 1403.101 | 1721.52 | 1310.62 | 7.1 × 1011 | |
| f9 | Worst | 386.6249 | 24.65843 | 247.4207 | 274.3637 | 16.6179 | 34.5862 | 0 |
| Best | 185.2967 | 5.32 × 10−9 | 87.51504 | 146.6758 | 0 | 0 | 0 | |
| Average | 2.91 × 102 | 7.61 × 10 | 1.67 × 102 | 2.12 × 102 | 5.9 × 10−1 | 1.3 × 10 | 0 | |
| STD | 4.50 × 101 | 5.54 × 10 | 3.78 × 101 | 2.98 × 101 | 4.3 × 10 | 5.1 × 10 | 0 | |
| f10 | Worst | 426.8172 | 0.041462 | 126.051 | 0.611543 | 0.1969 | 0.0227 | 0 |
| Best | 120.6772 | 2.88 × 10−15 | 1.436757 | 0.188632 | 0 | 0 | 0 | |
| Average | 254.698 | 0.006692 | 19.0622 | 0.367474 | 0.0089 | 0.0008 | 0 | |
| STD | 77.16924 | 0.011735 | 36.4966 | 0.104 | 0.0401 | 0.0043 | 0 | |
| f11 | Worst | 1.61 × 108 | 0.241454 | 419,191 | 0.909969 | 0.4626 | 0.0362 | 0.00347 |
| Best | 2.76 × 106 | 1.71 × 10−2 | 1.18 × 101 | 4.75 × 10−2 | 1.1 × 10−2 | 5.2 × 10−5 | 5.66 × 10−9 | |
| Average | 4.82 × 107 | 6.39 × 10−2 | 1.71 × 106 | 2.41 × 10−1 | 5.9 × 10−2 | 3.1 × 10−3 | 1.16 × 10−4 | |
| STD | 4.09 × 107 | 4.87 × 10−2 | 8.66 × 106 | 1.78 × 10−1 | 8.4 × 10−2 | 6.9 × 10−3 | 6.33 × 10−4 | |
| f12 | Worst | 1.64 × 108 | 0.249422 | 440,232 | 0.852634 | 0.442 | 0.033 | 0.0035 |
| Best | 2.75 × 106 | 1.68 × 10−2 | 1.21 × 101 | 4.92 × 10−2 | 1.1 × 10−2 | 5.3 × 10−5 | 5.69 × 10−9 | |
| Average | 4.83 × 107 | 6.45 × 10−2 | 1.78 × 106 | 2.35 × 10−1 | 5.8 × 10−2 | 2.9 × 10−3 | 1.16 × 10−4 | |
| STD | 4.11 × 107 | 4.88 × 10−2 | 8.27 × 106 | 1.89 × 10−1 | 8.5 × 10−2 | 6.9 × 10−3 | 6.33 × 10−4 | |
| f13 | Worst | 449,511 | 1.4077 | 13,866 | 2.65717 | 1.498 | 2.0922 | 8.37 × 10−6 |
| Best | 1.65 × 107 | 2.86 × 10−1 | 9.67 × 101 | 6.42 × 10−1 | 2.8 × 10−1 | 6.2 × 10−2 | 8.58 × 10−8 | |
| Average | 1.47 × 108 | 8.10 × 10−1 | 5.20 × 106 | 1.45 × 10 | 7.9 × 10−1 | 1.0 × 10 | 1.06 × 10−6 | |
| STD | 1.06 × 108 | 2.75 × 10−1 | 2.73 × 107 | 4.95 × 10−1 | 3.1 × 10−1 | 5.6 × 10−1 | 1.72 × 10−6 | |
| f14 | Worst | 5.192171 | 12.66872 | 9.50493 | 9.1099 | 10.975 | 8.0995 | 2.967 |
| Best | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | |
| Average | 1.452797 | 4.8815 | 2.41707 | 3.177 | 3.3345 | 1.639 | 1.0791 | |
| STD | 0.992756 | 4.1625 | 2.14684 | 2.4604 | 3.278 | 1.604 | 0.3832 | |
| f15 | Worst | 0.059781 | 0.021665 | 0.012176 | 0.00242 | 0.0041 | 0.00187 | 0.00159 |
| Best | 0.00104 | 0.000312 | 0.000604 | 0.000598 | 0.00032 | 0.00031 | 0.00031 | |
| Average | 0.014654 | 0.004761 | 0.001708 | 0.000943 | 0.00083 | 0.00082 | 0.0007 | |
| STD | 0.013943 | 0.008261 | 0.002676 | 0.000353 | 0.00074 | 0.00042 | 0.00032 | |
| f16 | Worst | −0.5501 | −2.9809 | −3.0249 | −3.2028 | −2.4351 | −2.78316 | −3.2031 |
| Best | −2.8874 | −3.322 | −3.322 | −3.322 | −3.3215 | −3.322 | −3.322 | |
| Average | −1.5422 | −3.2555 | −3.2295 | −3.2680 | −3.2046 | −3.2249 | −3.2703 | |
| STD | 0.5363 | 0.0840 | 0.0654 | 0.0591 | 0.1424 | 0.1085 | 0.0589 | |
| f17 | Worst | −0.318 | −2.543 | −2.631 | −2.6305 | −1.786 | −2.631 | −9.706 |
| Best | −3.126 | −10.153 | −10.15 | −10.1532 | −10.2 | −10.15 | −10.15 | |
| Average | −0.808 | −9.040 | −6.64 | −6.876 | −7.68 | −7.09 | −10.14 | |
| STD | 0.485 | 2.351 | 3.321 | 3.23 | 2.78 | 2.633 | 0.067 | |
| f18 | Worst | −0.411 | −4.153 | −1.989 | −2.3467 | −1.708 | −2.023 | −10.15 |
| Best | −3.312 | −10.402 | −10.40 | −10.403 | −10.40 | −10.40 | −10.40 | |
| Average | −0.953 | −10.217 | −7.509 | −8.519 | −7.045 | −8.074 | −10.39 | |
| STD | 0.492 | 0.945 | 3.426 | 2.978 | 3.081 | 2.867 | 0.03 | |
| f19 | Worst | −0.594 | −2.4372 | −2.023 | −2.371 | −1.62 | −2.078 | −10.47 |
| Best | −3.84 | −10.54 | −10.54 | −10.54 | −10.53 | −10.54 | −10.54 | |
| Average | −1.183 | −10.191 | −7.76 | −9.116 | −6.597 | −8.39 | −10.53 | |
| STD | 0.4949 | 1.476 | 3.54 | 2.7542 | 3.276 | 3.0028 | 0.01 |
| Function Name | Metric | GA | GWO | MFO | PSO | WOA | DBO | MSIDBO |
|---|---|---|---|---|---|---|---|---|
| f1 | Worst | 47,060.83 | 3.22 × 10−14 | 15,141.26 | 13.24628 | 170.8127 | 2.78 × 10−53 | 0 |
| Best | 1.3 × 104 | 2.52 × 10−16 | 5.03 × 101 | 2.87 × 10 | 6.10 × 10−50 | 4.91 × 10−91 | 0 | |
| Average | 2.83 × 104 | 4.89 × 10−15 | 2.06 × 103 | 6.91 × 10 | 1.67 × 10−40 | 8.65 × 10−55 | 0 | |
| STD | 8.64 × 103 | 6.85 × 10−15 | 4.33 × 103 | 2.53 × 10 | 9.06 × 10−40 | 5.08 × 10−54 | 0 | |
| f2 | Worst | 83.83187 | 4.25 × 10−9 | 78.7468 | 13.9419 | 5.98 × 10−28 | 1.094 × 10−26 | 1.5 × 10−183 |
| Best | 45.73391 | 4.14 × 10−10 | 3.849611 | 5.4771 | 3.67 × 10−34 | 2.65 × 10−47 | 1.46 × 10−217 | |
| Average | 63.181247 | 105 × 10−9 | 35.11558 | 9.0236 | 2.36 × 10−29 | 3.65 × 10−28 | 5.11 × 10−185 | |
| STD | 9.264722 | 9.11 × 10−10 | 19.5689 | 2.0265 | 1.11 × 10−28 | 2.00 × 10−27 | 0 | |
| f3 | Worst | 97,172.37 | 0.7521 | 49,847.9 | 695.7483 | 99,905.81 | 5.7118 | 0 |
| Best | 2.78 × 104 | 7.60 × 10−4 | 8.79 × 103 | 1.81 × 102 | 3.14 × 104 | 3.51 × 10−76 | 0 | |
| Average | 5.51 × 104 | 6.88 × 10−2 | 2.52 × 104 | 3.80 × 102 | 6.63 × 104 | 1.90 × 10−1 | 0 | |
| STD | 1.68 × 104 | 1.44 × 10−4 | 1.05 × 104 | 1.20 × 102 | 1.67 × 104 | 1.04 × 10 | 0 | |
| f4 | Worst | 86.884 | 0.00366 | 83.62059 | 3.198605 | 89.00863 | 1.917 × 10−24 | 8.75 × 10−177 |
| Best | 56.1521 | 0.000168 | 51.08274 | 1.7975417 | 3.145723 | 4.07 × 10−45 | 8.69 × 10−26 | |
| Average | 73.542202 | 0.000969 | 69.6489 | 0.42622 | 53.91484 | 6.40 × 10−26 | 2.92 × 10−178 | |
| STD | 7.696102 | 0.000786 | 7.97995 | 0.332727 | 27.16403 | 3.50 × 10−25 | 0 | |
| f5 | Worst | 1.23 × 108 | 28.79245 | 59,238,621 | 6627.839 | 28.80585 | 27.77071 | 25.9643 |
| Best | 8,811,374 | 26.09719 | 7164.07 | 848.7921 | 27.66348 | 25.89962 | 24.84403 | |
| Average | 45,135,450 | 27.42661 | 2,806,309 | 2627.183 | 28.40701 | 26.42594 | 25.47919 | |
| STD | 27,999,197 | 0.79301 | 12,767,934 | 1374.001 | 0.341337 | 0.400149 | 0.272682 | |
| f6 | Worst | 46,879.233 | 1.888057 | 14,017.877 | 13.5477 | 1.62581 | 0.3568693 | 1.95 × 10−5 |
| Best | 1.22 × 104 | 2.10 × 10−1 | 5.28 × 101 | 3.04 × 10 | 2.78 × 10−1 | 1.70 × 10−3 | 2.32 × 10−7 | |
| Average | 2.77 × 104 | 9.97 × 10−1 | 2.31 × 103 | 6.90 × 10 | 8.54 × 10−1 | 5.82 × 10−2 | 2.70 × 10−6 | |
| STD | 8.71 × 103 | 4.11 × 10−1 | 4.22 × 103 | 2.58 × 10 | 3.41 × 10−1 | 9.07 × 10−2 | 4.11 × 10−6 | |
| f7 | Worst | 55.52498 | 0.009321 | 26.93012 | 90.47312 | 0.002868 | 0.007282 | 0.000599 |
| Best | 4.88 × 10 | 1.12 × 10−3 | 1.72 × 10−1 | 8177 × 10 | 1.92 × 10−4 | 1.93 × 10−4 | 9.01 × 10−6 | |
| Average | 21.79246 | 0.003875 | 3.316123 | 36.30217 | 0.00605 | 0.00206 | 0.000157 | |
| STD | 12.66769 | 0.001962 | 6.287797 | 20.09501 | 0.006784 | 0.001723 | 0.000141 | |
| f8 | Worst | −1267.73 | −3594.26 | −6697.17 | −2895.65 | −7041.94 | −6147.06 | −2.5 × 1010 |
| Best | −3409.11 | −7652.27 | −1010.9 | −7839.41 | −12,546.6 | −11,252.6 | −4 × 1012 | |
| Average | −2173.52 | −5955.47 | −8504.9 | −5384.74 | −9829.7 | −7927.88 | −3.6 × 1011 | |
| STD | 521.8694 | 909.7507 | 878.0597 | 1418.273 | 1703.079 | 287.079 | 8.1 × 1011 | |
| f9 | Worst | 384.2572 | 24.70109 | 246.4823 | 27.9647 | 25.67536 | 30.33065 | 0 |
| Best | 191.528 | 4.79 × 10−9 | 90.29257 | 146.4949 | 0 | 0 | 0 | |
| Average | 2.92 × 102 | 7.78 × 10 | 1.66 × 102 | 2.11 × 102 | 9.34 × 10−1 | 1.27 × 10 | 0 | |
| STD | 4.38 × 101 | 5.92 × 10 | 3.67 × 101 | 3.04 × 101 | 4.76 × 10 | 5.77 × 10 | 0 | |
| f10 | Worst | 431.1977 | 0.039783 | 137.0223 | 0.622614 | 0.228926 | 0.26325 | 0 |
| Best | 117.9765 | 2.95 × 10−15 | 1.45628 | 0.181875 | 0 | 0 | 0 | |
| Average | 253.767 | 0.006536 | 20.4144 | 0.366436 | 0.01058 | 0.001148 | 0 | |
| STD | 77.74329 | 0.011321 | 38.43099 | 0.106027 | 0.043394 | 0.004656 | 0 | |
| f11 | Worst | 1.72 × 108 | 0.234841 | 43626794 | 0.891138 | 0.334394 | 0.049533 | 0.003463 |
| Best | 2.95 × 106 | 1.80 × 10−2 | 1.21 × 101 | 4.83 × 10−2 | 1024 × 10−2 | 4.92 × 10−5 | 6.04 × 10−9 | |
| Average | 4.90 × 107 | 6.39 × 10−2 | 1.90 × 106 | 2.38 × 10−1 | 5.50 × 10−2 | 3.62 × 10−3 | 1.15 × 10−4 | |
| STD | 4.24 × 107 | 4.60 × 10−2 | 8088 × 106 | 1.85 × 10−1 | 6.43 × 10−2 | 1.02 × 10−2 | 6.32 × 10−4 | |
| f12 | Worst | 1.68 × 108 | 0.248472 | 47774328 | 0.907832 | 0.337022 | 0.047568 | 0.003463 |
| Best | 2.93 × 106 | 1.80 × 10−2 | 1.21 × 101 | 4.81 × 10−2 | 1.24 × 10−2 | 5.01 × 10−5 | 6.00 × 10−9 | |
| Average | 4.92 × 107 | 6.41 × 10−2 | 1.90 × 106 | 2.38 × 10−1 | 5.52 × 10−2 | 3.62 × 10−3 | 1.15 × 10−4 | |
| STD | 4.27 × 107 | 4.59 × 10−2 | 8.88 × 106 | 1.86 × 10−1 | 6.42 × 10−2 | 1.02 × 10−2 | 6.32 × 10−4 | |
| f13 | Worst | 452,965.6 | 1.39155 | 158,787.8 | 2.67353 | 1.506665 | 2.068567 | 7.067 × 10−6 |
| Best | 1.92 × 107 | 3.06 × 10−1 | 1.08 × 102 | 6068 × 10−1 | 2.75 × 10−1 | 8.56 × 10−2 | 8.21 × 10−8 | |
| Average | 1.48 × 108 | 8.18 × 10−1 | 5.86 × 106 | 1.44 × 10 | 7.82 × 10−1 | 1.03 × 10 | 1.12 × 10−6 | |
| STD | 1.08 × 108 | 2.66 × 10−1 | 3.00 × 107 | 4.93 × 10−1 | 3.12 × 10−1 | 5.41 × 10−1 | 1.61 × 10−6 | |
| f14 | Worst | 5.600183 | 12.68501 | 9.321312 | 9.360967 | 11.02894 | 7.962617 | 2.618797 |
| Best | 0.9983 | 0.9981 | 0.9982 | 0.998 | 0.9981 | 0.9984 | 0.9982 | |
| Average | 1.470307 | 4.881533 | 2.420437 | 3.150983 | 3.430722 | 1.662825 | 1.07296 | |
| STD | 1.05 × 10 | 4.162533 | 2.13 × 10 | 2.51 × 10 | 3.36 × 10 | 1.61 × 10 | 3.30 × 10−1 | |
| f15 | Worst | 0.059899 | 0.021655 | 0.014185 | 0.001907 | 0.004183 | 0.001909 | 0.001563 |
| Best | 0.001008 | 0.000314 | 0.000605 | 0.000618 | 0.000317 | 0.00308 | 0.000309 | |
| Average | 0.014315 | 0.004719 | 0.001788 | 0.000934 | 0.000818 | 0.000827 | 0.000704 | |
| STD | 0.014104 | 0.008098 | 0.002943 | 0.000256 | 0.000806 | 0.000431 | 0.000324 | |
| f16 | Worst | −0.54294 | −2.94784 | −3.0336 | −3.2028 | −2.43004 | −2.753082 | −3.2031 |
| Best | −2.8889 | −3.322 | −3.322 | −3.322 | −3.3215 | −3.322 | −3.322 | |
| Average | −1.54377 | −3.25589 | −3.2285 | −3.26701 | −3.20363 | −3.2237 | −3.26929 | |
| STD | 0.533095 | 0.084835 | 0.06568 | 0.0592 | 0.14395 | 0.110705 | 0.05909 | |
| f17 | Worst | −0.319 | −2.541 | −2.6305 | −2.6305 | −1849 | −2.631 | −9.855 |
| Best | −3.211 | −10.15 | −10.1532 | −10.1532 | −10,152 | −10.15 | −10.15 | |
| Average | −0.815 | −8.98 | −6.617 | −6.8967 | −7.7006 | −7.013 | −10.14 | |
| STD | 0.4949 | 2.398 | 3.31986 | 3.2151 | 2.67675 | 2.6187 | 0.35 | |
| f18 | Worst | −0.414 | −3.703 | −2.0203 | −2.3476 | −1.7156 | −2.0833 | −10,158 |
| Best | −3.31293 | −10.4025 | −10.4029 | −10.4029 | −10.401 | −10.403 | −104,029 | |
| Average | −0.96489 | −10199 | −7.548 | −8.48659 | −7.065 | −81,011 | −1039 | |
| STD | 0.4967 | 1.0318 | 3.42173 | 3.0054 | 3.0877 | 2.8608 | 0.02935 | |
| f19 | Worst | −0.5987 | −2.531 | −1.9923 | −2.3513 | −1.6329 | −2.094 | −10.474 |
| Best | −4.265 | −10,536 | −10.5364 | −10.5364 | −10.53 | −10.536 | −105,364 | |
| Average | −1.17597 | −10,179 | −7.76749 | −9.1143 | −6.5757 | −8.3602 | −105,326 | |
| STD | 0.4738 | 1.542 | 3.54116 | 2.7224 | 3.26742 | 2.99516 | 0.00961 |
| Function Name | Metric | GA | GWO | MFO | PSO | WOA | DBO | MSIDBO |
|---|---|---|---|---|---|---|---|---|
| f1 | Worst | 47,399.25 | 3.291 × 10−14 | 14,797.58 | 13.157 | 102.488 | 2.9 × 10−53 | 0 |
| Best | 1.30 × 104 | 2.47 × 10−16 | 5.14 × 101 | 2.87 × 10 | 5.36 × 10−50 | 3.09 × 10−91 | 0 | |
| Average | 2.82 × 104 | 5.03 × 10−15 | 2.10 × 103 | 6.89 × 10 | 1.04 × 10−40 | 9.77 × 10−55 | 0 | |
| STD | 8.65 × 103 | 7.05 × 10−15 | 4.30 × 103 | 2.53 × 10 | 5.62 × 10−40 | 5.27 × 10−54 | 0 | |
| f2 | Worst | 83.9902 | 4.291 × 10−9 | 79.884068 | 13.81985 | 5.167 × 10−28 | 7.2 × 10−27 | 2.07 × 10−183 |
| Best | 45.6242 | 4.23 × 10−10 | 3.7710064 | 5.510094 | 3.28 × 10−34 | 1.60 × 10−47 | 8.74 × 10−218 | |
| Average | 63.19297 | 1.52 × 10−9 | 35.409994 | 9.007968 | 2.05 × 10−29 | 2.41 × 10−28 | 6.90 × 10−185 | |
| STD | 9.257723 | 9.13 × 10−10 | 19.680174 | 1.99159 | 9.57 × 10−29 | 1.31 × 10−27 | 0 | |
| f3 | Worst | 97,429.1 | 0.812516 | 50,226.56 | 687.1484 | 99,321.49 | 3.427076 | 0 |
| Best | 2.80 × 104 | 7.42 × 10−4 | 8.80 × 103 | 1.82 × 102 | 3.09 × 104 | 2.10 × 10−76 | 0 | |
| Average | 5.53 × 104 | 7.18 × 10−2 | 2.50 × 104 | 3.77 × 102 | 6.32 × 104 | 1.14 × 10−1 | 0 | |
| STD | 1.65 × 104 | 1.65 × 10−1 | 1.05 × 104 | 1.20 × 102 | 1.66 × 104 | 6.26 × 10−1 | 0 | |
| f4 | Worst | 86.86557 | 0.003877968 | 83.975839 | 3.210732 | 89.156423 | 3.42 × 10−24 | 5.25 × 10−177 |
| Best | 56.00025 | 0.000169495 | 50.586567 | 1.811183 | 3.54558 | 3.36 × 10−45 | 9.52 × 10−214 | |
| Average | 73.53378 | 0.000979805 | 69.730078 | 2.430323 | 54.242383 | 1.14 × 10−25 | 1.75 × 10−178 | |
| STD | 7.746593 | 0.000830081 | 8.088455 | 0.3305 | 27.034469 | 6.24 × 10−25 | 0 | |
| f5 | Worst | 1.16 × 108 | 28.77079 | 43,416,151 | 6205.322 | 28.79904 | 27.55294 | 25.93408 |
| Best | 8,545,640 | 26.07047 | 6957.318 | 809.3929 | 27.66108 | 25.90102 | 24.87498 | |
| Average | 44,424,260 | 27.38908 | 2,055,556 | 2572.316 | 28.39524 | 26.40696 | 25.48113 | |
| STD | 26,219,238 | 0.772878 | 8,911,164 | 1299.916 | 0.341806 | 0.356248 | 0.260821 | |
| f6 | Worst | 47,171.09 | 1.901686 | 14,914.64 | 13.559 | 1.670371 | 0.3597 | 1.988 × 10−5 |
| Best | 1.22 × 104 | 1.97 × 10−1 | 5.20 × 101 | 3.00 × 10 | 2.81 × 10−1 | 1.68 × 10−3 | 2.28 × 10−7 | |
| Average | 2.78 × 104 | 9.84 × 10−1 | 2.24 × 103 | 6.90 × 10 | 8.52 × 10−1 | 5.81 × 10−2 | 2.75 × 10−6 | |
| STD | 8.66 × 103 | 4.18 × 10−1 | 4.35 × 103 | 2.54 × 10 | 3.43 × 10−1 | 9.65 × 10−2 | 4.09 × 10−6 | |
| f7 | Worst | 54.89628 | 0.009572 | 27.59129 | 91.97557 | 0.027872 | 0.007225 | 0.000602 |
| Best | 4.82 × 10 | 1.08 × 10−3 | 1.71 × 10−1 | 8.31 × 10 | 1.80 × 10−4 | 1.90 × 10−4 | 8.67 × 10−6 | |
| Average | 21.77833 | 0.003853 | 3.337068 | 36.4818 | 0.006005 | 0.002084 | 0.000159 | |
| STD | 12.55115 | 0.001977 | 6.293029 | 20.54151 | 0.006716 | 0.001697 | 0.000142 | |
| f8 | Worst | −1249.28 | −3471.2 | −6735.39 | −2904.71 | −7103.28 | −6111.66 | −2.5 × 1010 |
| Best | −3440.29 | −7639.39 | −10,154.8 | −7969.89 | −12,554.5 | −11,228.6 | −3.6 × 1012 | |
| Average | −2169.19 | −5951.5 | −8515.51 | −5400.25 | −9857.02 | −7914.14 | −3.4 × 1011 | |
| STD | 528.4644 | 921.9968 | 865.4096 | 1430.685 | 1713.684 | 1297.772 | 7.19 × 1011 | |
| f9 | Worst | 384.278 | 28.04614 | 247.2384 | 272.0869 | 26.83625 | 28.64649 | 0 |
| Best | 198.9717 | 2.9 × 10−9 | 91.00348 | 148.2142 | 0 | 0 | 0 | |
| Average | 2.91 × 102 | 7.88 × 10 | 1.67 × 102 | 2.12 × 102 | 9.43 × 10−1 | 1.22 × 10 | 0 | |
| STD | 4.41 × 101 | 6.54 × 10 | 3.69 × 101 | 3.02 × 101 | 4.94 × 10 | 5.46 × 10 | 0 | |
| f10 | Worst | 429.6659 | 0.038694 | 135.8756 | 0.616756 | 0.225699 | 0.027315 | 0 |
| Best | 118.4294 | 2.97 × 10−15 | 1.452113 | 0.183202 | 0 | 0 | 0 | |
| Average | 2.53 × 102 | 6.66 × 10−3 | 2.09 × 101 | 3.69 × 10−1 | 1.10 × 10−2 | 1.05 × 10−3 | 0 | |
| STD | 7.80 × 101 | 1.12 × 10−2 | 3.96 × 101 | 1.05 × 10−1 | 4.65 × 10−2 | 5.17 × 10−3 | 0 | |
| f11 | Worst | 1.74 × 108 | 0.242085 | 54,754,976 | 0.888256 | 0.347258 | 0.043088 | 0.002078 |
| Best | 2.88 × 106 | 1.77 × 10−2 | 1.21 × 101 | 4.86 × 10−2 | 1.23 × 10−2 | 4.79 × 10−5 | 6.05 × 10−9 | |
| Average | 4.89 × 107 | 6.35 × 10−2 | 2.27 × 106 | 2.35 × 10−1 | 5.59 × 10−2 | 3.23 × 10−3 | 6.93 × 10−5 | |
| STD | 4.27 × 107 | 4.71 × 10−2 | 1.09 × 107 | 1.85 × 10−1 | 6.61 × 10−2 | 8.83 × 10−3 | 3.79 × 10−4 | |
| f12 | Worst | 174,221.5 | 0.24208463 | 54,755.74 | 0.8883 | 0.3472581 | 0.043088 | 0.0020781 |
| Best | 2.88 × 106 | 1.77 × 10−2 | 1.21 × 101 | 4.86 × 10−2 | 1.23 × 10−2 | 4.79 × 10−5 | 6.05 × 10−9 | |
| Average | 4.89 × 107 | 6.35 × 10−2 | 2.27 × 106 | 2.35 × 10−1 | 5.59 × 10−2 | 3.23 × 10−3 | 6.93 × 10−5 | |
| STD | 4.27 × 107 | 4.71 × 10−2 | 1.09 × 107 | 1.85 × 10−1 | 6.61 × 10−2 | 8.83 × 10−3 | 3.79 × 10−4 | |
| f13 | Worst | 44,047.2 | 1.398164 | 171,203.5 | 2.708498 | 1.509419 | 2.060259 | 7.515 × 10−6 |
| Best | 1.85 × 107 | 3.16 × 10−1 | 1.10 × 102 | 6.57 × 10−1 | 2.74 × 10−1 | 8.01 × 10−2 | 8.26 × 10−8 | |
| Average | 1.47 × 108 | 8.28 × 10−1 | 6.62 × 106 | 1.44 × 10 | 7.80 × 10−1 | 1.03 × 10 | 1.12 × 10−6 | |
| STD | 1.05 × 108 | 2.68 × 10−1 | 3.30 × 107 | 4.99 × 10−1 | 3.11 × 10−1 | 5.44 × 10−1 | 1.61 × 10−6 | |
| f14 | Worst | 5.52789 | 12.71625 | 9.31413 | 9.255525 | 11.32096 | 7.918539 | 2.403875 |
| Best | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | 0.998 | |
| Average | 1.465371 | 4.681182 | 2.450801 | 3.130818 | 3.402065 | 1.66973 | 1.063373 | |
| STD | 1.044614 | 4.101196 | 2.141818 | 2.452627 | 3.30675 | 1.602825 | 0.28916 | |
| f15 | Worst | 0.062858 | 0.021507 | 0.013096 | 0.001702 | 0.004747 | 0.001903 | 0.001509 |
| Best | 0.001024 | 0.000315 | 0.000614 | 0.000618 | 0.000316 | 0.000308 | 0.000308 | |
| Average | 0.014875 | 0.004617 | 0.001705 | 0.000926 | 0.000859 | 0.000828 | 0.0007 | |
| STD | 0.014875 | 0.00801 | 0.002691 | 0.000216 | 0.000922 | 0.000431 | 0.000324 | |
| f16 | Worst | −0.5533 | −2.962267 | −3.00948 | −3.202858 | −2.470033 | −2.748 | −3.2031 |
| Best | −2.896 | −3.322 | −3.322 | −3.322 | −3.321454 | −3.322 | −3.322 | |
| Average | −1.544 | −3.256654 | −3.228337 | −3.267211 | −3.20243 | −3.223 | −3.268901 | |
| STD | 0.5293 | 0.08392682 | 0.06586 | 0.05924 | 0.14353 | 0.1103 | 0.059099 | |
| f17 | Worst | −0.317 | −2.557448 | −2.6305 | −2.6305 | −1.904 | −2.631 | −9.8866 |
| Best | −3.389 | −10.1527 | −10.153 | −10.153 | −10.152 | −10.15 | −10.153 | |
| Average | −0.817 | −8.97082 | −6.5838 | −6.9079 | −7.6909 | −6.989 | −10.142 | |
| STD | 0.505 | 2.39862 | 3.3139 | 3.2124 | 2.7723 | 2.6069 | 0.03235 | |
| f18 | Worst | −0.419 | −3.7898 | −1.9655 | −2.336 | −1.724 | −2.129 | −10.226 |
| Best | −3.326 | −10.4024 | −10.403 | −10.41 | −10.401 | −10.41 | −10.403 | |
| Average | −0.96 | −10.194 | −7.5417 | −8.449 | −7.0764 | −8.11 | −10.396 | |
| STD | 0.4899 | 1.04452 | 3.422 | 3.017 | 3.088 | 2.8644 | 0.0224 | |
| f19 | Worst | −0.591 | −2.5181 | −1.9941 | −2.34 | −1.6243 | −2.12 | −10.477 |
| Best | −4.24 | −10.5359 | −10.536 | −10.536 | −10.53 | −10.54 | −10.536 | |
| Average | −1.173 | −10.17441 | −7.7544 | −9.104 | −6.559 | −8.363 | −10.533 | |
| STD | 0.4729 | 1.561447 | 3.5422 | 2.7467 | 3.2594 | 2.9881 | 0.00928 |
| Map Size | Obstacle Rate | Metric | DBO | MSIDBO | Decrease Percentage (%) |
|---|---|---|---|---|---|
| 10 × 10 | 10% | Path Length (m) | 14.4853 | 14.1532 | 2.29% |
| Number of Turns | 6 | 4 | 33.33% | ||
| Iteration | 90 | 80 | 11.11% | ||
| 15% | Path Length (m) | 15.05 | 12.73 | 15.41% | |
| Number of Turns | 5 | 0 | 100.00% | ||
| Iteration | 90 | 88 | 2.22% | ||
| 20% | Path Length (m) | 14.46 | 13.28 | 13.54% | |
| Number of Turns | 5 | 3 | 40% | ||
| Iteration | 92 | 65 | 29.35% | ||
| 15 × 15 | 10% | Path Length (m) | 25.65685 | 20.38478 | 20.55% |
| Number of Turns | 6 | 4 | 33.33% | ||
| Iteration | 91 | 78 | 14.29% | ||
| 15% | Path Length (m) | 25.31371 | 20.97056 | 17.16% | |
| Number of Turns | 15 | 5 | 66.67% | ||
| Iteration | 63 | 50 | 20.63% | ||
| 20% | Path Length (m) | 22.14214 | 20.38478 | 7.94% | |
| Number of Turns | 10 | 4 | 60% | ||
| Iteration | 90 | 83 | 7.78% | ||
| 20 × 20 | 10% | Path Length (m) | 34.4853 | 33.3137 | 3.40% |
| Number of Turns | 10 | 7 | 30.00% | ||
| Iteration | 80 | 70 | 12.50% | ||
| 15% | Path Length (m) | 35.64 | 30.92 | 13.24% | |
| Number of Turns | 8 | 13 | −6.25% | ||
| Iteration | 72 | 67 | 6.94% | ||
| 20% | Path Length (m) | 43.56 | 30.63 | 29.68% | |
| Number of Turns | 19 | 11 | 42.11% | ||
| Iteration | 96 | 76 | 20.83% | ||
| 30 × 30 | 10% | Path Length (m) | 55.64 | 51.47 | 7.49% |
| Number of Turns | 5 | 17 | −70.58% | ||
| Iteration | 56 | 50 | 10.71% | ||
| 15% | Path Length (m) | 60.93 | 52.57 | 13.72% | |
| Number of Turns | 11 | 7 | 36.37% | ||
| Iteration | 97 | 80 | 17.53% | ||
| 20% | Path Length (m) | 57.72 | 54.08 | 6.31% | |
| Number of Turns | 6 | 16 | −166.67% | ||
| Iteration | 110 | 100 | 9.09% | ||
| 40 × 40 | 10% | Path Length (m) | 75.24 | 68.53 | 8.92% |
| Number of Turns | 5 | 23 | −360.00% | ||
| Iteration | 93 | 42 | 54.84% | ||
| 15% | Path Length (m) | 188.94 | 77.74 | 58.85% | |
| Number of Turns | 46 | 29 | 36.96% | ||
| Iteration | 90 | 80 | 11.11% | ||
| 20% | Path Length (m) | 76.83 | 72.73 | 5.34% | |
| Number of Turns | 4 | 9 | −175.00% | ||
| Iteration | 95 | 91 | 4.21% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Liu, L.; Shao, Y.; Zhang, X.; Chen, Y.; Guo, C.; Nian, H. Enhancing Swarm Intelligence for Obstacle Avoidance with Multi-Strategy and Improved Dung Beetle Optimization Algorithm in Mobile Robot Navigation. Electronics 2023, 12, 4462. https://doi.org/10.3390/electronics12214462
Li L, Liu L, Shao Y, Zhang X, Chen Y, Guo C, Nian H. Enhancing Swarm Intelligence for Obstacle Avoidance with Multi-Strategy and Improved Dung Beetle Optimization Algorithm in Mobile Robot Navigation. Electronics. 2023; 12(21):4462. https://doi.org/10.3390/electronics12214462
Chicago/Turabian StyleLi, Longhai, Lili Liu, Yuxuan Shao, Xu Zhang, Yue Chen, Ce Guo, and Heng Nian. 2023. "Enhancing Swarm Intelligence for Obstacle Avoidance with Multi-Strategy and Improved Dung Beetle Optimization Algorithm in Mobile Robot Navigation" Electronics 12, no. 21: 4462. https://doi.org/10.3390/electronics12214462
APA StyleLi, L., Liu, L., Shao, Y., Zhang, X., Chen, Y., Guo, C., & Nian, H. (2023). Enhancing Swarm Intelligence for Obstacle Avoidance with Multi-Strategy and Improved Dung Beetle Optimization Algorithm in Mobile Robot Navigation. Electronics, 12(21), 4462. https://doi.org/10.3390/electronics12214462