
Output Feedback Control of Overhead Cranes Based on Disturbance Compensation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
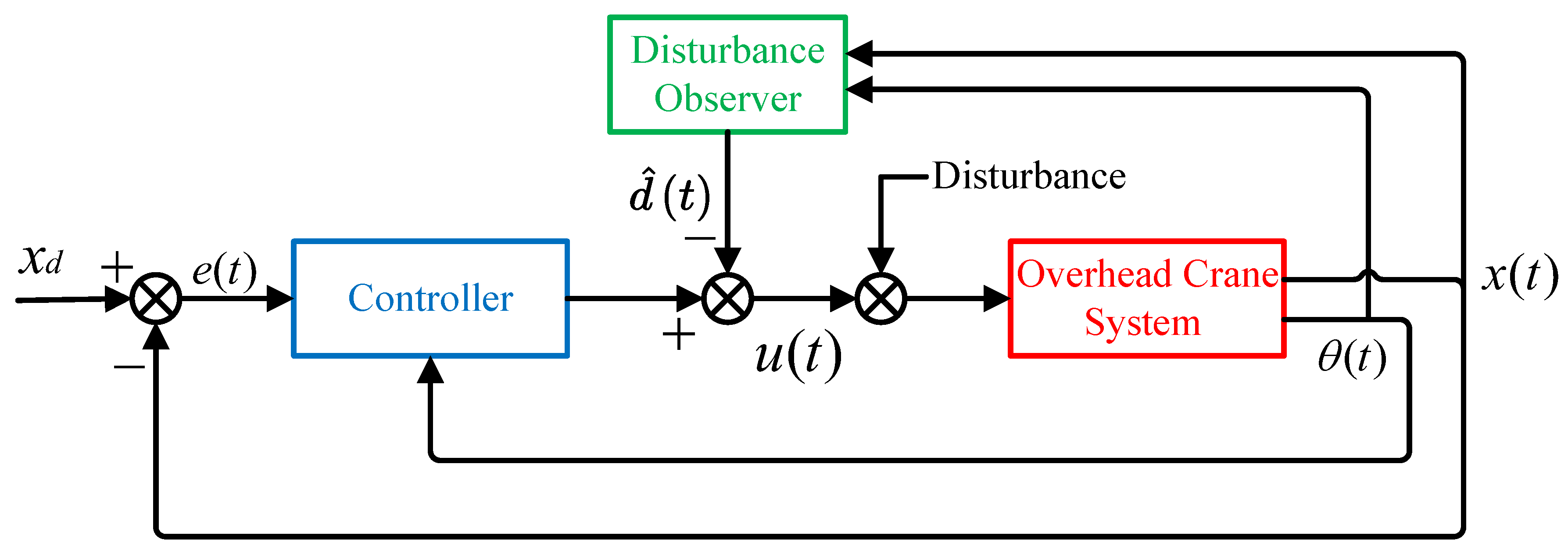
- Uncertain external disturbances are estimated and compensated through a feedforward control way, which hence enhances the robustness of the overhead crane system.
- The practical problem of actuators providing only limited force is taken into consideration. The amplitude of the proposed control method can be set on the basis of the practical actuators.
- The designed controller uses only output feedback, that is, the proposed approach does not require the velocity sensors in real applications, which can reduce hardware costs.
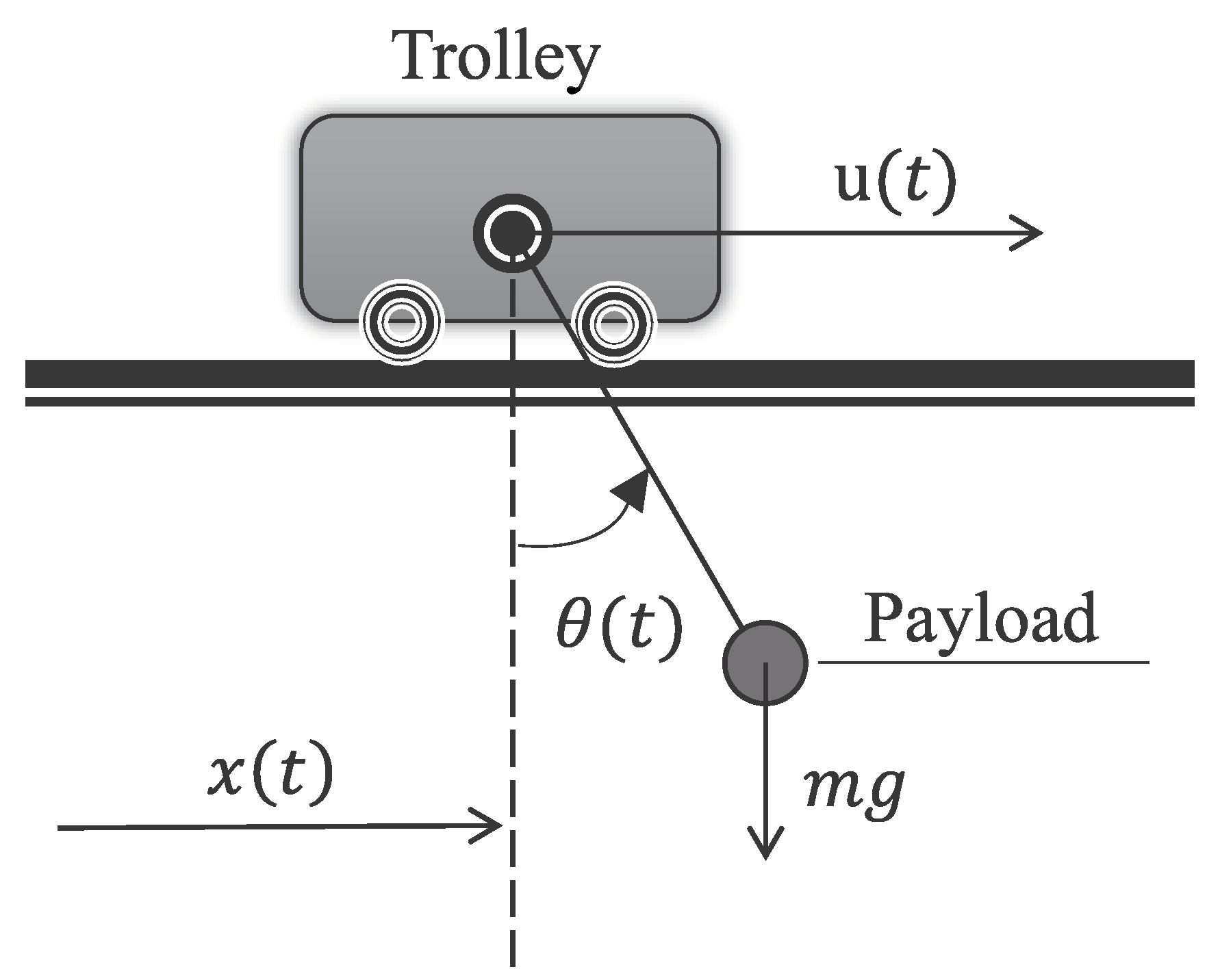
2. Dynamic Model of the Overhead Crane System
3. Main Results
3.1. Disturbance Observer Design
3.2. Energy Storage Function Construction
3.3. Control Law Development
3.4. Stability Analysis
4. Simulation Results
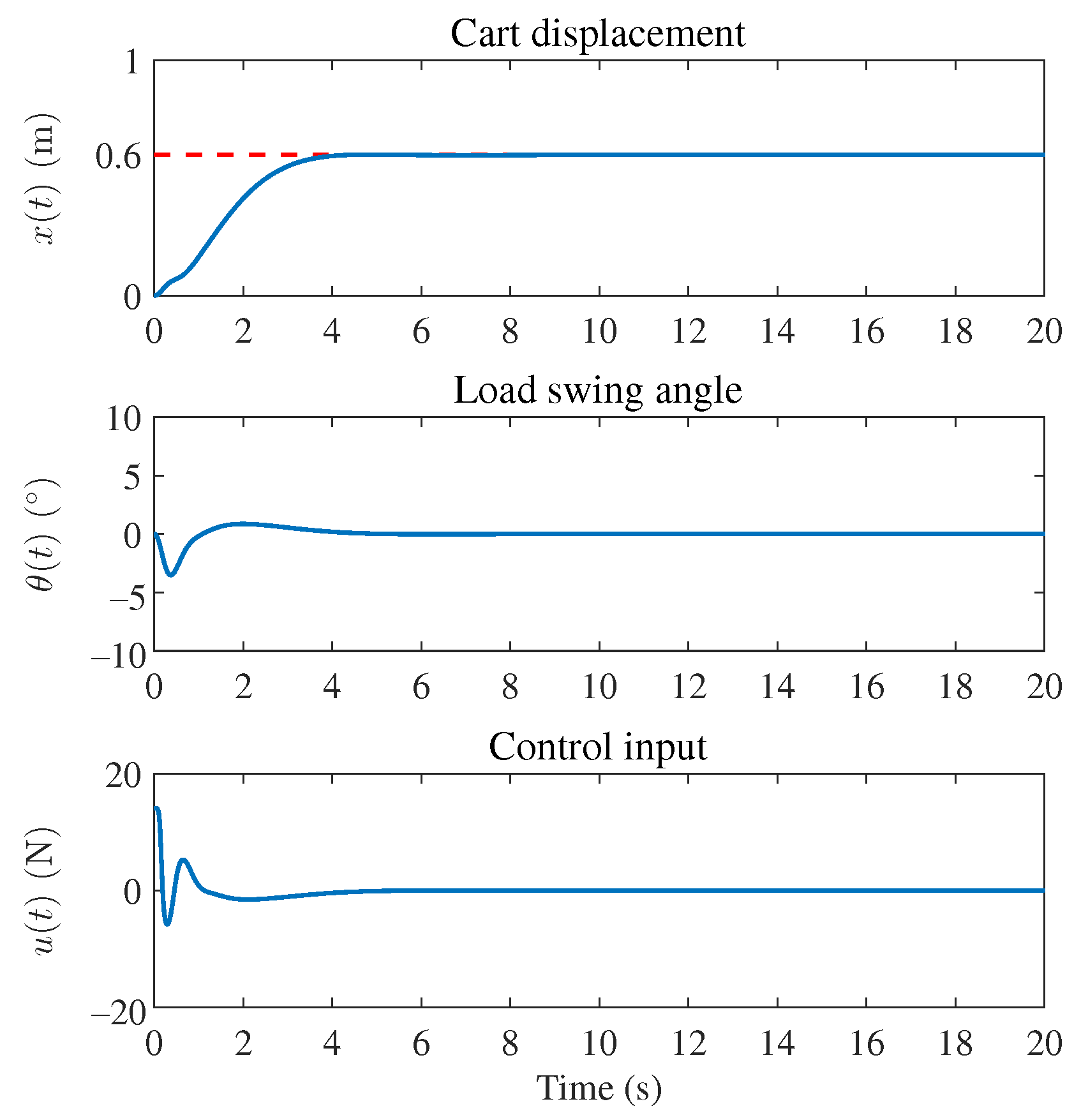
4.1. Effectiveness Verification
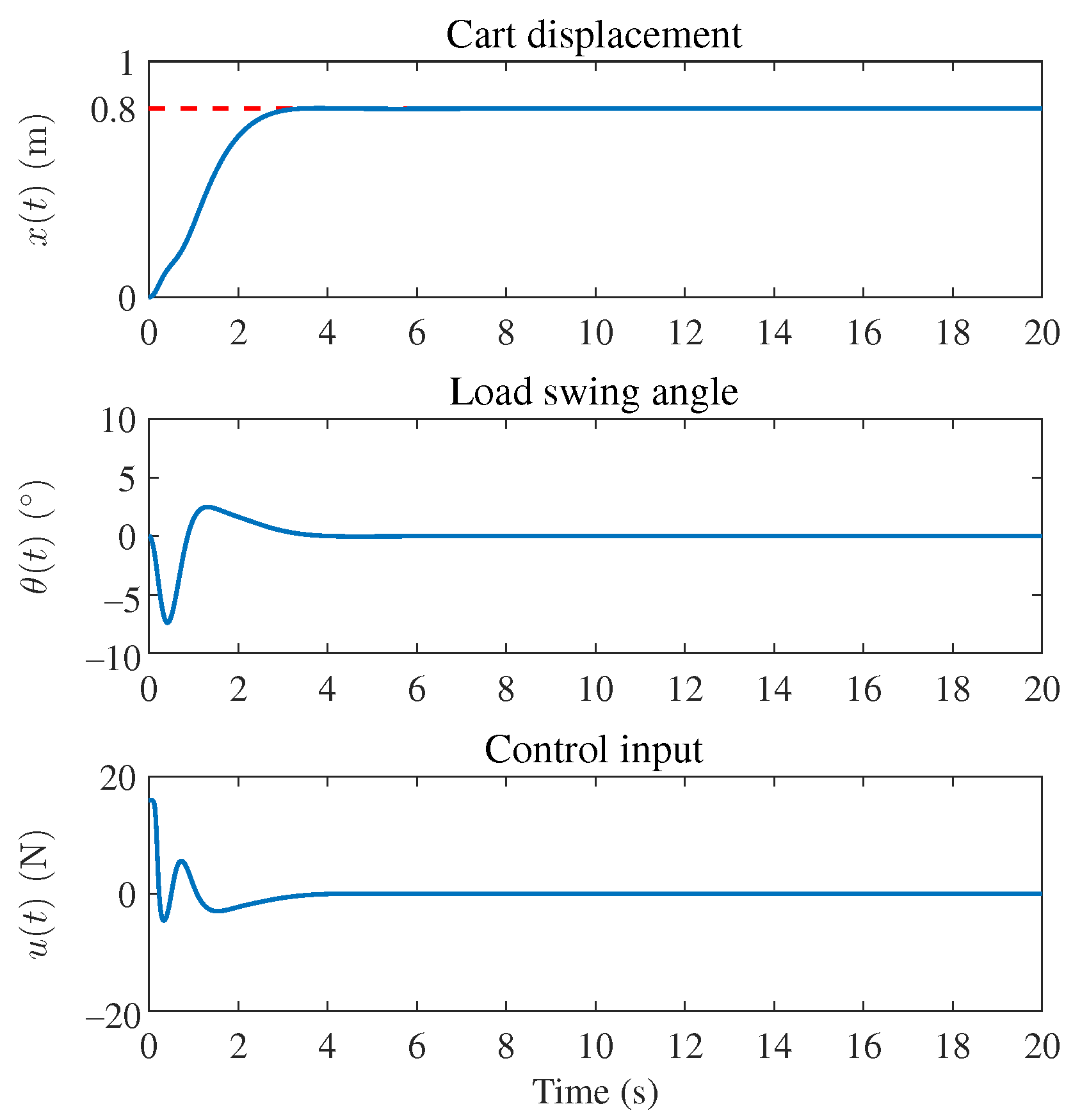
4.2. Robustness Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ortega, R.; Spong, M.; Gomez-Estern, F.; Blankenstein, G. Stabilization of a class of underactuated mechanical systems via interconnection and damping assignment. IEEE Trans. Autom. Control 2002, 47, 1218–1233. [Google Scholar] [CrossRef]
- Franco, E.; Astolfi, A.; y Baena, F.R. Robust balancing control of flexible inverted-pendulum systems. Mech. Mach. Theory 2018, 130, 539–551. [Google Scholar] [CrossRef]
- Li, E.; Liang, Z.Z.; Hou, Z.G.; Tan, M. Energy-based balance control approach to the ball and beam system. Int. J. Control 2009, 82, 981–992. [Google Scholar] [CrossRef]
- Liang, X.; Fang, Y.; Sun, N.; Lin, H.; Zhao, X. Adaptive nonlinear hierarchical control for a rotorcraft transporting a cable-suspended payload. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 4171–4182. [Google Scholar] [CrossRef]
- Liang, X.; Fang, Y.; Sun, N.; Lin, H. A novel energy-coupling-based hierarchical control approach for unmanned quadrotor transportation systems. IEEE/ASME Trans. Mechatronics 2019, 24, 248–259. [Google Scholar] [CrossRef]
- Aguilar-Ibáñez, C.; Sira-Ramírez, H.; Suárez-Castañón, M.S.; Martínez-Navarro, E.; Moreno-Armendariz, M.A. The trajectory tracking problem for an unmanned four-rotor system: Flatness-based approach. Int. J. Control 2012, 85, 69–77. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Liu, X. Adaptive near-optimal control of uncertain systems with application to underactuated surface vessels. IEEE Trans. Control Syst. Technol. 2017, 26, 1204–1218. [Google Scholar] [CrossRef]
- Wen, S.; Chen, M.Z.; Zeng, Z.; Yu, X.; Huang, T. Fuzzy control for uncertain vehicle active suspension systems via dynamic sliding-mode approach. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 24–32. [Google Scholar] [CrossRef]
- Li, H.; Jing, X.; Karimi, H.R. Output-feedback-based H∞ control for vehicle suspension systems with control delay. IEEE Trans. Ind. Electron. 2013, 61, 436–446. [Google Scholar] [CrossRef]
- Zhang, M. Finite-time model-free trajectory tracking control for overhead cranes subject to model uncertainties, parameter variations and external disturbances. Trans. Inst. Meas. Control 2019, 41, 3516–3525. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Y.; Cheng, X. Finite-time trajectory tracking control for overhead crane systems subject to unknown disturbances. IEEE Access 2019, 7, 55974–55982. [Google Scholar] [CrossRef]
- Wu, X.; Xu, K.; Ma, M.; Ke, L. Output feedback control for an underactuated benchmark system with bounded torques. Asian J. Control 2021, 23, 1466–1475. [Google Scholar] [CrossRef]
- Hu, R.; Han, L.; Huang, J. Stabilization control of underactuated cranes with guaranteed transient performance. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 1358–1363. [Google Scholar]
- Tang, R.; Huang, J. Control of bridge cranes with distributed-mass payloads under windy conditions. Mech. Syst. Signal Process. 2016, 72, 409–419. [Google Scholar] [CrossRef]
- Maghsoudi, M.J.; Mohamed, Z.; Sudin, S.; Buyamin, S.; Jaafar, H.; Ahmad, S. An improved input shaping design for an efficient sway control of a nonlinear 3D overhead crane with friction. Mech. Syst. Signal Process. 2017, 92, 364–378. [Google Scholar] [CrossRef]
- Sorensen, K.L.; Singhose, W.E. Command-induced vibration analysis using input shaping principles. Automatica 2008, 44, 2392–2397. [Google Scholar] [CrossRef]
- Li, F.; Zhang, C.; Sun, B. A minimum-time motion online planning method for underactuated overhead crane systems. IEEE Access 2019, 7, 54586–54594. [Google Scholar] [CrossRef]
- Sun, N.; Wu, Y.; Chen, H.; Fang, Y. An energy-optimal solution for transportation control of cranes with double pendulum dynamics: Design and experiments. Mech. Syst. Signal Process. 2018, 102, 87–101. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Chai, H.; Rong, X.; Tian, X.; Li, Y. A novel online motion planning method for double-pendulum overhead cranes. Nonlinear Dyn. 2016, 85, 1079–1090. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Sun, N. Minimum-time trajectory planning for underactuated overhead crane systems with state and control constraints. IEEE Trans. Ind. Electron. 2014, 61, 6915–6925. [Google Scholar] [CrossRef]
- Wu, X.; He, X.; Sun, N. An analytical trajectory planning method for underactuated overhead cranes with constraints. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 1966–1971. [Google Scholar]
- Wu, X.; He, X. Nonlinear energy-based regulation control of three-dimensional overhead cranes. IEEE Trans. Autom. Sci. Eng. 2016, 14, 1297–1308. [Google Scholar] [CrossRef]
- Sun, N.; Yang, T.; Chen, H.; Fang, Y.; Qian, Y. Adaptive anti-swing and positioning control for 4-DOF rotary cranes subject to uncertain/unknown parameters with hardware experiments. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 1309–1321. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Wu, X. An enhanced coupling nonlinear control method for bridge cranes. IET Control Theory Appl. 2014, 8, 1215–1223. [Google Scholar] [CrossRef]
- Sun, N.; Wu, Y.; Fang, Y.; Chen, H. Nonlinear antiswing control for crane systems with double-pendulum swing effects and uncertain parameters: Design and experiments. IEEE Trans. Autom. Sci. Eng. 2017, 15, 1413–1422. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Song, R.; Rong, X.; Tian, G.; Tian, X.; Li, Y. Adaptive proportional-derivative sliding mode control law with improved transient performance for underactuated overhead crane systems. IEEE/CAA J. Autom. Sin. 2018, 5, 683–690. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Rong, X.; Tian, X.; Li, Y. Adaptive tracking control for double-pendulum overhead cranes subject to tracking error limitation, parametric uncertainties and external disturbances. Mech. Syst. Signal Process. 2016, 76, 15–32. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H. Adaptive antiswing control for cranes in the presence of rail length constraints and uncertainties. Nonlinear Dyn. 2015, 81, 41–51. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H.; He, B. Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters: Design and experiments. IEEE/ASME Trans. Mechatronics 2014, 20, 2107–2119. [Google Scholar] [CrossRef]
- Wu, X.; Xu, K.; Lei, M.; He, X. Disturbance-compensation-based continuous sliding mode control for overhead cranes with disturbances. IEEE Trans. Autom. Sci. Eng. 2020, 17, 2182–2189. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Y.; Chen, H.; Cheng, X. Model-independent PD-SMC method with payload swing suppression for 3D overhead crane systems. Mech. Syst. Signal Process. 2019, 129, 381–393. [Google Scholar] [CrossRef]
- Ouyang, H.; Wang, J.; Zhang, G.; Mei, L.; Deng, X. Novel adaptive hierarchical sliding mode control for trajectory tracking and load sway rejection in double-pendulum overhead cranes. IEEE Access 2019, 7, 10353–10361. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, Y.; Huang, J. Differential-flatness-based finite-time anti-swing control of underactuated crane systems. Nonlinear Dyn. 2017, 87, 1749–1761. [Google Scholar] [CrossRef]
- Smoczek, J.; Szpytko, J. Particle swarm optimization-based multivariable generalized predictive control for an overhead crane. IEEE/ASME Trans. Mechatronics 2016, 22, 258–268. [Google Scholar] [CrossRef]
- Chen, H.; Fang, Y.; Sun, N. A swing constraint guaranteed MPC algorithm for underactuated overhead cranes. IEEE/ASME Trans. Mechatronics 2016, 21, 2543–2555. [Google Scholar] [CrossRef]
- Wu, Z.; Xia, X.; Zhu, B. Model predictive control for improving operational efficiency of overhead cranes. Nonlinear Dyn. 2015, 79, 2639–2657. [Google Scholar] [CrossRef]
- Jolevski, D.; Bego, O. Model predictive control of gantry/bridge crane with anti-sway algorithm. J. Mech. Sci. Technol. 2015, 29, 827–834. [Google Scholar] [CrossRef]
- Drąg, Ł. Model of an artificial neural network for optimization of payload positioning in sea waves. Ocean Eng. 2016, 115, 123–134. [Google Scholar] [CrossRef]
- Smoczek, J.; Szpytko, J. Evolutionary algorithm-based design of a fuzzy TBF predictive model and TSK fuzzy anti-sway crane control system. Eng. Appl. Artif. Intell. 2014, 28, 190–200. [Google Scholar] [CrossRef]
- Lee, L.H.; Huang, P.H.; Shih, Y.C.; Chiang, T.C.; Chang, C.Y. Parallel neural network combined with sliding mode control in overhead crane control system. J. Vib. Control 2014, 20, 749–760. [Google Scholar] [CrossRef]
- Sun, N.; Fang, Y.; Chen, H. A new antiswing control method for underactuated cranes with unmodeled uncertainties: Theoretical design and hardware experiments. IEEE Trans. Ind. Electron. 2014, 62, 453–465. [Google Scholar] [CrossRef]
- Lee, H.H. Motion planning for three-dimensional overhead cranes with high-speed load hoisting. Int. J. Control 2005, 78, 875–886. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Yang, J.; Su, J.; Li, S.; Yu, X. High-order mismatched disturbance compensation for motion control systems via a continuous dynamic sliding-mode approach. IEEE Trans. Ind. Inform. 2013, 10, 604–614. [Google Scholar] [CrossRef]
- Yin, J.; Khoo, S.; Man, Z.; Yu, X. Finite-time stability and instability of stochastic nonlinear systems. Automatica 2011, 47, 2671–2677. [Google Scholar] [CrossRef]
- Wu, X.; He, X.; Wang, M. A new anti-swing control law for overhead crane systems. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 678–683. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Lei, M.; Wu, X. Output Feedback Control of Overhead Cranes Based on Disturbance Compensation. Electronics 2023, 12, 4474. https://doi.org/10.3390/electronics12214474
Sun H, Lei M, Wu X. Output Feedback Control of Overhead Cranes Based on Disturbance Compensation. Electronics. 2023; 12(21):4474. https://doi.org/10.3390/electronics12214474
Chicago/Turabian StyleSun, Haozhe, Meizhen Lei, and Xianqing Wu. 2023. "Output Feedback Control of Overhead Cranes Based on Disturbance Compensation" Electronics 12, no. 21: 4474. https://doi.org/10.3390/electronics12214474
APA StyleSun, H., Lei, M., & Wu, X. (2023). Output Feedback Control of Overhead Cranes Based on Disturbance Compensation. Electronics, 12(21), 4474. https://doi.org/10.3390/electronics12214474