
A Novel Loosely Coupling Fusion Approach of Ultra-Wideband and Wheel Odometry for Indoor Localisation


Abstract
:1. Introduction
- This paper introduces a straightforward adaptive localisation algorithm that first identifies NLOS through a previous sliding window approach. The ranging values of the optimal localisation anchors are then actively selected for localisation in complex indoor environments to effectively mitigate the effects of NLOS.
- This paper introduces a novel Dynamic Dimension Fusion (DDF) algorithm loosely integrating UWB and wheeled odometers. This integration facilitates 1D and 2D fusion, adapting to varying motion states. Through comparative analysis with the UKF algorithm, the proposed approach outperforms the UKF algorithm regarding localisation precision.
- This paper substantiates the accuracy and effectiveness of the proposed algorithm through comprehensive data collection in a real-world indoor environment.
2. Methods
2.1. UWB
2.2. Odometer
2.3. Methodology
3. Experiment and Results
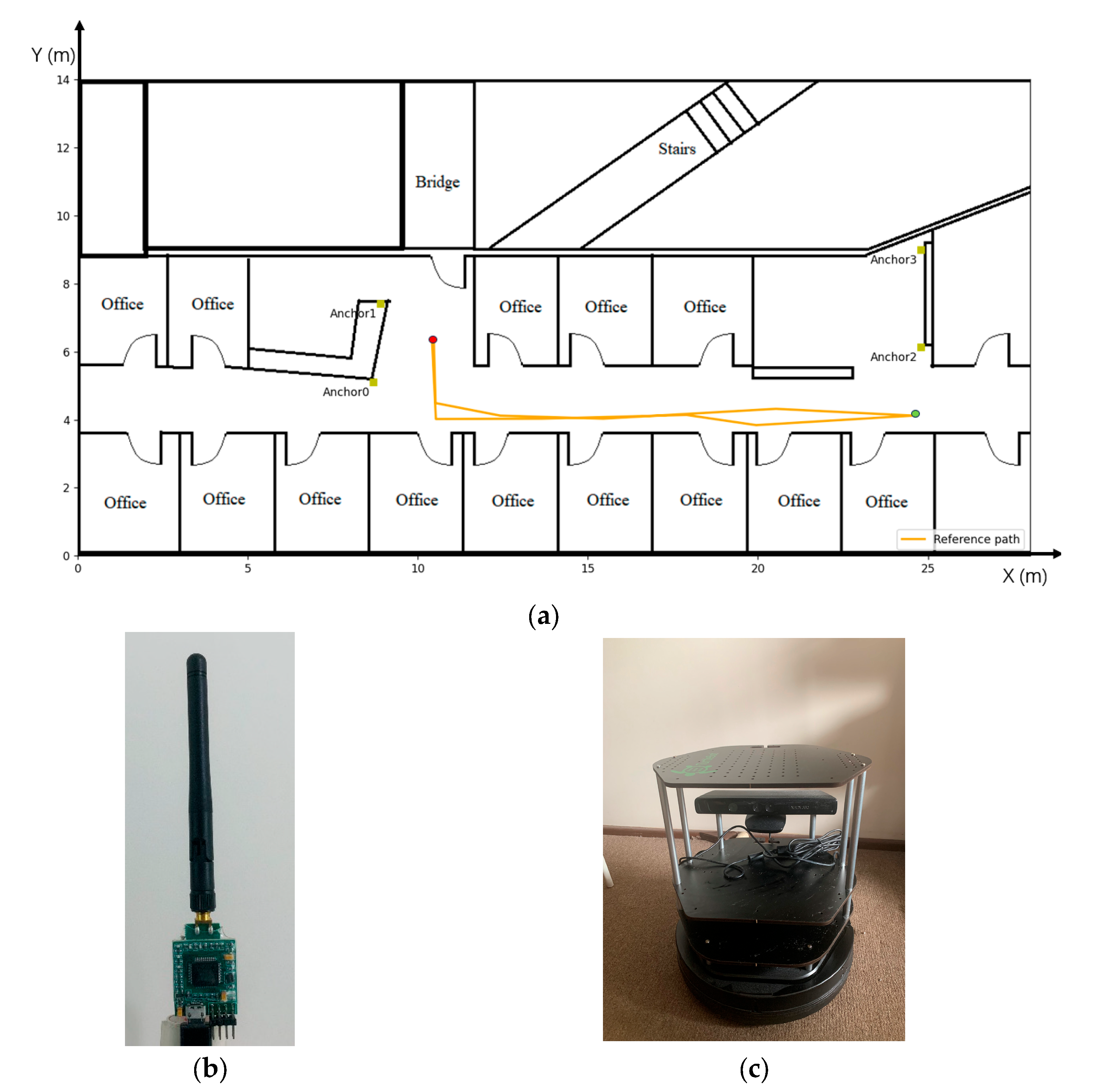
3.1. Experimental Environments and Equipment
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Q.; Niu, X.; Shi, C. Impact assessment of various IMU error sources on the relative accuracy of the GNSS/INS systems. IEEE Sens. J. 2020, 20, 5026–5038. [Google Scholar] [CrossRef]
- Hu, J.; Hu, C. A WiFi Indoor Location Tracking Algorithm Based on Improved Weighted K Nearest Neighbors and Kalman Filter. IEEE Access 2023, 11, 32907–32918. [Google Scholar] [CrossRef]
- Babalola, O.P.; Balyan, V. WiFi fingerprinting indoor localization based on dynamic mode decomposition feature selection with hidden Markov model. Sensors 2021, 21, 6778. [Google Scholar] [CrossRef]
- Jondhale, S.R.; Mohan, V.; Sharma, B.B.; Lloret, J.; Athawale, S.V. Support vector regression for mobile target localization in indoor environments. Sensors 2022, 22, 358. [Google Scholar] [CrossRef]
- Newman, N. Apple iBeacon technology briefing. J. Direct Data Digit. Mark. Pract. 2014, 15, 222–225. [Google Scholar] [CrossRef]
- Aranda, F.J.; Parralejo, F.; Álvarez, F.J.; Paredes, J.A. Performance analysis of fingerprinting indoor positioning methods with BLE. Expert Syst. Appl. 2022, 202, 117095. [Google Scholar] [CrossRef]
- Qayyum, U.; Kim, J. Depth-camera-aided inertial navigation utilizing directional constraints. Sensors 2021, 21, 5913. [Google Scholar] [CrossRef]
- Damodaran, D.; Mozaffari, S.; Alirezaee, S.; Ahamed, M.J. Experimental Analysis of the Behavior of Mirror-like Objects in LiDAR-Based Robot Navigation. Appl. Sci. 2023, 13, 2908. [Google Scholar] [CrossRef]
- Sharma, S.; Deka, K.; Mandloi, M. Deep learning noncoherent UWB receiver design. IEEE Sens. Lett. 2021, 5, 7002104. [Google Scholar] [CrossRef]
- Zhou, N.; Lau, L.; Bai, R.; Moore, T. Novel prior position determination approaches in particle filter for ultra wideband (UWB)-based indoor positioning. Navig. J. Inst. Navig. 2021, 68, 277–292. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Q.; Xu, J.; Li, Z.; Yang, Y. Time delay characteristics analysis of UWB diffraction propagation in indoor NLOS environment. IEEE Commun. Lett. 2022, 27, 1889–1893. [Google Scholar] [CrossRef]
- Li, J.; Gao, T.; Wang, X.; Guo, W.; Bai, D. Study on the UWB location algorithm in the NLOS environment. J. Phys. Conf. Ser. 2022, 2400, 012043. [Google Scholar] [CrossRef]
- Chen, C.; Huang, Z.; Wang, J.; Yuan, L.; Bao, J.; Chen, Z. Channel-quality-evaluation-based anchor node selection for UWB indoor positioning. Electronics 2022, 11, 436. [Google Scholar] [CrossRef]
- Cully, W.P.; Cotton, S.L.; Scanlon, W.G.; McQuiston, J. Body shadowing mitigation using differentiated LOS/NLOS channel models for RSSI-based Monte Carlo personnel localization. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 694–698. [Google Scholar]
- Ferreira, A.G.; Fernandes, D.; Branco, S.; Catarino, A.P.; Monteiro, J.L. Feature selection for real-time NLOS identification and mitigation for body-mounted UWB transceivers. IEEE Trans. Instrum. Meas. 2021, 70, 5502310. [Google Scholar] [CrossRef]
- Moro, G.; Di Luca, F.; Dardari, D.; Frisoni, G. Human Being Detection from UWB NLOS Signals: Accuracy and Generality of Advanced Machine Learning Models. Sensors 2022, 22, 1656. [Google Scholar] [CrossRef]
- Bharadwaj, R.; Alomainy, A.; Koul, S.K. Experimental investigation of body-centric indoor localization using compact wearable antennas and machine learning algorithms. IEEE Trans. Antennas Propag. 2021, 70, 1344–1354. [Google Scholar] [CrossRef]
- Cui, Z.; Gao, Y.; Hu, J.; Tian, S.; Cheng, J. LOS/NLOS identification for indoor UWB positioning based on Morlet wavelet transform and convolutional neural networks. IEEE Commun. Lett. 2020, 25, 879–882. [Google Scholar] [CrossRef]
- Musa, A.; Nugraha, G.D.; Han, H.; Choi, D.; Seo, S.; Kim, J. A decision tree-based NLOS detection method for the UWB indoor location tracking accuracy improvement. Int. J. Commun. Syst. 2019, 32, e3997. [Google Scholar] [CrossRef]
- Kim, D.-H.; Farhad, A.; Pyun, J.-Y. UWB positioning system based on LSTM classification with mitigated NLOS effects. IEEE Internet Things J. 2022, 10, 1822–1835. [Google Scholar] [CrossRef]
- Dineva, K.; Atanasova, T. Systematic look at machine learning algorithms—Advantages, disadvantages and practical applications. Int. Multidiscip. Sci. GeoConf. SGEM 2020, 20, 317–324. [Google Scholar]
- Feng, D.; Peng, J.; Zhuang, Y.; Guo, C.; Zhang, T.; Chu, Y.; Zhou, X.; Xia, X.-G. An Adaptive IMU/UWB Fusion Method for NLOS Indoor Positioning and Navigation. IEEE Internet Things J. 2023, 10, 11414–11428. [Google Scholar] [CrossRef]
- Ali, R.; Liu, R.; Nayyar, A.; Qureshi, B.; Cao, Z. Tightly coupling fusion of UWB ranging and IMU pedestrian dead reckoning for indoor localization. IEEE Access 2021, 9, 164206–164222. [Google Scholar] [CrossRef]
- Peng, P.; Yu, C.; Xia, Q.; Zheng, Z.; Zhao, K.; Chen, W. An indoor positioning method based on UWB and visual fusion. Sensors 2022, 22, 1394. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Guan, L.; Chang, Z.; Li, C.; Gao, Y. Design of a low-cost indoor navigation system for food delivery robot based on multi-sensor information fusion. Sensors 2019, 19, 4980. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Xu, A.; Sui, X.; Hao, Y.; Zhang, C.; Shi, Z. NLOS Identification-and Correction-Focused Fusion of UWB and LiDAR-SLAM Based on Factor Graph Optimization for High-Precision Positioning with Reduced Drift. Remote Sens. 2022, 14, 4258. [Google Scholar] [CrossRef]
- Kim, D.-H.; Pyun, J.-Y. NLOS identification based UWB and PDR hybrid positioning system. IEEE Access 2021, 9, 102917–102929. [Google Scholar] [CrossRef]
- Li, J.; Gao, T.; Wang, X.; Bai, D.; Guo, W. The IMU/UWB/odometer fusion positioning algorithm based on EKF. J. Phys. Conf. Ser. 2022, 2369, 012092. [Google Scholar] [CrossRef]
- Venkata Krishnaveni, B.; Reddy, S. Indoor Tracking by Adding IMU and UWB using Unscented Kalman Filter. Wirel. Pers. Commun. 2022, 123, 3575–3596. [Google Scholar] [CrossRef]
- Jia, L.; Wang, Y.; Ma, L.; He, Z.; Li, Z.; Cui, Y. Integrated Positioning System of Kiwifruit Orchard Mobile Robot Based on UWB/LiDAR/ODOM. Sensors 2023, 23, 7570. [Google Scholar] [CrossRef]
- Tang, C.; He, C.; Dou, L. An IMU/ODM/UWB joint localization system based on modified cubature kalman filtering. Sensors 2021, 21, 4823. [Google Scholar] [CrossRef]
- Zhou, B.; Fang, H.; Xu, J. UWB-IMU-odometer fusion localization scheme: Observability analysis and experiments. IEEE Sens. J. 2022, 23, 2550–2564. [Google Scholar] [CrossRef]
- Naheem, K.; Kim, M.S. A low-cost foot-placed UWB and IMU fusion-based indoor pedestrian tracking system for IoT applications. Sensors 2022, 22, 8160. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y. UWB ranging error analysis based on TOA mode. J. Phys. Conf. Ser. 2021, 1939, 012124. [Google Scholar] [CrossRef]
- Mújica-Vargas, D.; Vela-Rincón, V.; Luna-Álvarez, A.; Rendón-Castro, A.; Matuz-Cruz, M.; Rubio, J. Navigation of a Differential Wheeled Robot Based on a Type-2 Fuzzy Inference Tree. Machines 2022, 10, 660. [Google Scholar] [CrossRef]
- Wang, Z.; Tan, J.; Sun, Z. Error factor and mathematical model of positioning with odometer wheel. Adv. Mech. Eng. 2015, 7, 305981. [Google Scholar] [CrossRef]
- Tiemann, J.; Koring, L.; Gorczak, P.; Wietfeld, C. Improving the robustness of control-grade ultra-wideband localization. IFAC-Pap. 2018, 51, 103–108. [Google Scholar] [CrossRef]
- Liu, A.; Lin, S.; Wang, J.; Kong, X. A Succinct Method for Non-Line-of-Sight Mitigation for Ultra-Wideband Indoor Positioning System. Sensors 2022, 22, 8247. [Google Scholar] [CrossRef]
- Gui, L.; Zeng, C.; Dauchert, S.; Luo, J.; Wang, X. A ZUPT Aided Initialization Procedure for Tightly-coupled Lidar Inertial Odometry based SLAM System. J. Intell. Robot. Syst. 2023, 108, 40. [Google Scholar] [CrossRef]
- Umek, A.; Kos, A. Validation of UWB positioning systems for player tracking in tennis. Pers. Ubiquitous Comput. 2022, 26, 1023–1033. [Google Scholar] [CrossRef]
- Wei, Z.; Jiang, R.; Wei, X.; Cheng, Y.-A.; Cheng, L.; Wang, C. Novel indoor positioning system based on ultra-wide bandwidth. Vis. Comput. Ind. Biomed. Art 2020, 3, 1. [Google Scholar] [CrossRef]
- Polonelli, T.; Qin, Y.; Yeatman, E.M.; Benini, L.; Boyle, D. A flexible, low-power platform for UAV-based data collection from remote sensors. IEEE Access 2020, 8, 164775–164785. [Google Scholar] [CrossRef]
- Yao, H.; Wang, X.; Qi, H.; Liang, X. Tightly Coupled Indoor Positioning Using UWB/mmwave Radar/IMU. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 46, 323–329. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position Error | UWB (Original) | UWB (Adaptive) | Odometer (Original) | UKF | DDF |
|---|---|---|---|---|---|
| Max (m) | 16.899 | 2.968 | 1.191 | 0.677 | 0.170 |
| Mean (m) | 1.781 | 0.127 | 0.259 | 0.119 | 0.048 |
| RMSE (m) | 1.851 | 0.160 | 0.304 | 0.117 | 0.042 |
| Reference | Fusion Algorithm | Sensors | LOS/NLOS | Accuracy |
|---|---|---|---|---|
| [27] | KF | UWB and IMU | Hard NLOS environment | RMSE = 0.3–0.4 m |
| [28] | EKF | UWB, IMU, and odometer | LOS | Fusion-RMSE = 3.29 cm UWB-only RMSE = 4.66 cm |
| [29] | EKF UKF | UWB and IMU | LOS | MSE-EKF = 1.43 m MSE-UKF = 0.94 m |
| [30] | PF | UWB, LiDAR, and odometer | Weak NLOS environment | RMSE = 0.05 m |
| [24] | Federated Kalman filtering | UWB and Visual | Weak NLOS environment | Mean error of fusion: <30 cm |
| [43] | EKF | UWB, IMU, and mmWave radar | LOS | RMSE-UWB-IMU: 0.184 m RMSE-UWB-mmWave: 0.323 |
| This Paper | DDF | UWB and odometer | Hard NLOS environment | RMSE = 0.042 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, A.; Lin, S.; Wang, J.; Kong, X. A Novel Loosely Coupling Fusion Approach of Ultra-Wideband and Wheel Odometry for Indoor Localisation. Electronics 2023, 12, 4499. https://doi.org/10.3390/electronics12214499
Liu A, Lin S, Wang J, Kong X. A Novel Loosely Coupling Fusion Approach of Ultra-Wideband and Wheel Odometry for Indoor Localisation. Electronics. 2023; 12(21):4499. https://doi.org/10.3390/electronics12214499
Chicago/Turabian StyleLiu, Ang, Shiwei Lin, Jianguo Wang, and Xiaoying Kong. 2023. "A Novel Loosely Coupling Fusion Approach of Ultra-Wideband and Wheel Odometry for Indoor Localisation" Electronics 12, no. 21: 4499. https://doi.org/10.3390/electronics12214499