1. Introduction
Withthe continued increase in demand from global mobile users for information exchange, wireless communication is developing rapidly, in which the large-scale commercial development of the fifth-generation (the 5th generation, 5G) mobile communication is in full swing. The sixth-generation (the 6th generation, 6G) mobile communication technology is beginning to be researched and developed. The birth of 5G not only offers human-centered communication, which provides users with a significantly better communication experience, but also gives rise to many new internet industries such as cloud gaming, virtual reality, etc., [
1], which range from telephony, short message service (SMS), images, videos, audio and internet of things (IOT) data.
Nevertheless, along with the rapid development of technology and services and their large-scale popularization, the number of cell phone users has also increased dramatically. The available electromagnetic spectrum, as a crucial and limited resource for wireless communication, is becoming scarce, and the expansion of wireless communication services means the growing demand for electromagnetic spectrum bandwidth [
2]. The available spectrum resources planned by the ITU (International Telecommunication Union) are from 9 kHz to 275 GHz, and according to the ITU’s 2006 forecast report on spectrum resources, it is expected that the global demand for the spectrum will be from 1280 to 1720 MHz in 2020. However, with the development of mobile communication services and the increase in user data traffic, the originally predicted spectrum can no longer meet the future demand, and now it can only meet about half of the demand [
3]. To summarize, the shortage in electromagnetic spectrum resources, as a key problem of wireless mobile communication nowadays, will restrict the healthy development of wireless communication and become a bottleneck for developing wireless communication technology in the future if not solved effectively.
At present, spectrum resources are managed and allocated by governments worldwide, such as in the United States, where spectrum management and allocation are under the Federal Communications Commission, and in China, where the National Radio Administration manages the spectrum. Moreover, the allocation method is generally “static allocation”. The available spectrum is divided into multiple non-overlapping parts allocated to different users, the users of different frequency bands are called authorized users, and the frequency band is called the authorized frequency band. Although countries have made a rational allocation of the spectrum, after decades of development, it can be pointed out that the utilization rate of each frequency band at different times and in different geographical locations is disappointing. A study by the Federal Communications Commission of the United States found that, among the licensed frequency bands available and in use, spectrum utilization, especially in the hundreds of megabits to 3 GHz band, where the demand for frequencies is very tight, is very low, with the utilization rate of the licensed frequency bands fluctuating between 15 and 85 percent. Only a few frequency bands have high utilization rates, and the vast majority of frequency bands only have low utilization rates. The utilization rate in some regions is only 5%, so the utilization of the spectrum is extremely unbalanced. At present, the global spectrum resources below 1 GHz have been distributed to very few, and the remaining available frequency bands for wireless communication are also quite limited and cannot satisfy the expansion of new services. How to realize the dynamic management of the spectrum and spectrum sharing mechanisms to improve the efficiency of spectrum utilization in each period and each region has become an urgent problem to be solved [
4].
Cognitive radio (CR) is a technology that can improve spectrum utilization, and efficient and accurate spectrum detection is the key to its implementation. The concept of cognitive radio was proposed by Dr. Joseph Mitola, the “father of software radio”, in his doctoral dissertation in 1999 [
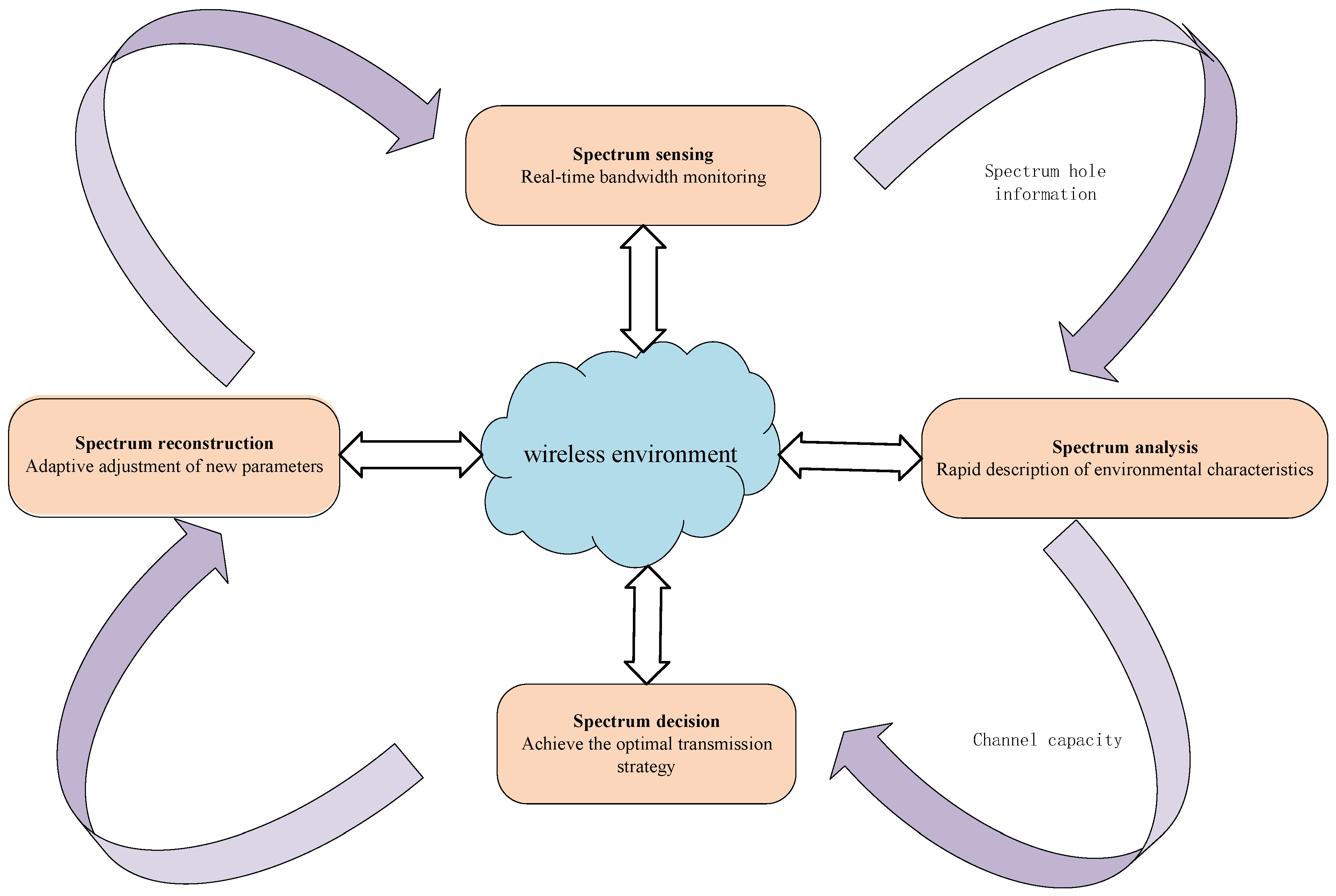
5]. He pointed out that the key to cognitive radio lies in the system’s ability to comprehensively recognize, analyze, learn, and judge all kinds of information in the external radio environment. The system can communicate intelligently with other cognitive devices to realize a dynamic spectrum allocation policy to improve the efficiency of the frequency spectrum and achieve reliable communication. The cognitive radio system consists of four main steps, i.e., spectrum sensing, spectrum analysis, spectrum judgment, and spectrum reconstruction. The working mode of the cognitive radio system is shown in
Figure 1 below.
Among the four steps, spectrum sensing (SS) is one of the essential components of cognitive radio, which is the core technology and prerequisite for realizing CR applications and constructing cognitive radio networks [
6] and is also the focus of this paper. Spectrum-sensing technology enhances spectrum use efficiency by continuously monitoring and analyzing the radio spectrum. It promptly identifies and utilizes unoccupied frequency bands when pre-allocated or statically assigned frequencies are unavailable, meeting the demand for spectrum resources. Radio spectrum sensing has a wide range of promising applications and has been the subject of significant research efforts. In the future, it is foreseeable that this technology will be widely used in communications, radar, unmanned aerial vehicles, intelligent transportation, and other fields. In the field of communication, spectrum sensing can be used for spectrum management and resource allocation in communication systems. SS can monitor the utilization of the radio spectrum to detect which primary user bands are free, for better spectrum resource allocation and dynamic spectrum sharing. In the field of radar, spectrum-sensing techniques can monitor and analyze the use of the radar spectrum to achieve optimal utilization and management of the spectrum for radar defense against jamming [
7]. In the field of unmanned aerial vehicles (UAVs), spectrum sensing can provide spectrum information for UAV communication and navigation. By sensing the surrounding spectral environment and information in real time, UAVs can select the optimal communication bands and avoid interfering sources. In addition, spectrum sensing can also help UAVs perform environment sensing and obstacle avoidance, improving safety and intelligence [
8]. In the field of smart transportation, this technology can monitor the spectrum used by various wireless devices and communication systems in transportation networks and perform dynamic spectrum management to ensure communication quality and reliability for various applications [
9]. As can be seen, the development of spectrum-sensing technology is of great strategic importance.
After decades of development, cognitive radio technology and its spectrum-sensing methods can be broadly categorized into two types: single-node spectrum sensing and cooperative spectrum sensing [
10]. Single-node spectrum sensing involves independent judgment by a single user, which does not require a complex system structure or data fusion. It provides a relatively simple sensing process but also faces challenges in breaking through the limitations imposed by physical constraints. On the other hand, cooperative spectrum sensing treats multiple sub-users as a group of cooperative entities that share sensing information. This approach aims to achieve more accurate frequency usage detection for primary users (PUs). However, it still encounters several practical challenges, including coordination, energy consumption, latency, security, and participation issues.
In recent years, artificial intelligence has emerged as a popular technology worldwide, and the development of deep learning has introduced new ideas and methods for spectrum-sensing research. Deep learning excels in nonlinear modeling and adaptive learning, significantly boosting spectrum sensing’s detection performance and speed. This, in turn, facilitates more efficient utilization of spectrum resources [
11]. Over the past few years, researchers in the field of communications have employed several prominent network models for spectrum sensing, including convolutional neural networks and long short-term memory networks [
12,
13]. Several published papers have demonstrated the superiority of deep-learning-based spectrum-sensing algorithms compared to traditional approaches. Consequently, numerous researchers have investigated the combination of deep learning neural networks with spectrum-sensing research. For instance, in [
14], scholars Kaixuan Du et al. considered the geodetic distances between signals as statistical features and employed deep neural networks (DNNs) for classifying the data based on these distances, achieving spectrum sensing. Additionally, Jianxin Gai et al. proposed a spectrum-sensing method based on residual networks (ResNets) in [
15]. This method employed two-branch convolution to improve the feature extraction capabilities, resulting in superior performance compared to traditional spectrum-sensing methods. The enhanced feature extraction capabilities led to higher detection probabilities and lower bit error rates (BERs) than the traditional methods, especially at low SNR ratios.
Currently, several institutions, including the University of Electronic Science and Technology, Harbin Institute of Technology, Beijing University of Posts and Telecommunications, Florida State University, and the University of Surrey, have been actively researching deep learning in the field of spectrum sensing for cognitive radio, and have made significant progress. This paper aims to provide a summary of the current research status, application scenarios, and future development directions of deep-learning-based spectrum-sensing technology.
However, it is crucial to note that although the spectrum-sensing approach based on classical deep learning (DL) networks has shown promising performance, it also has certain limitations. Most of the current research focuses on the combination of deep learning and non-cooperative spectrum sensing. There are drawbacks to this approach, however. First, in non-cooperative spectrum sensing, the availability of large-scale labeled data can be limited as each device typically only has its own sensing results, leading to a lack of data sharing and collaboration. Second, in non-cooperative spectrum sensing, individual devices sense and process independently, which may not meet the computational requirements of deep learning models due to the computational power and energy constraints of the devices.
There has been a growing interest among scholars to explore the application of deep learning to cooperative sensing. Cooperative sensing allows the aggregation of data from multiple devices, resulting in a larger and more diverse dataset that can be used to train deep learning models. This approach offers several advantages. First, cooperative sensing provides real-time spectrum information and environmental change data, enabling deep learning models to adapt and update rapidly to dynamic conditions. Second, it enhances the availability of observational data and multi-source information, which improves the ability of deep learning models to accurately sense and identify interfering sources.
Researchers have started to investigate deep-learning-based cooperative sensing algorithms. For instance, Tan et al. [
16] constructed a new 2D dataset of received signals and trained three cooperative spectrum sensing (CSS) schemes using classical convolutional neural networks (CNNs) such as LeNet, AlexNet, and VGG-16. They compared the performance of CSS schemes based on AND, OR, and majority judgment, with the former achieving favorable results. On the other hand, Chen et al. [
17] proposed a DNN-based CSS algorithm and introduced the federated learning framework (FLF) into CSS. Their results demonstrated a detection probability of 98.78% and a false detection probability of 1% at an SNR of −15 dB.
We have summarized the review papers on spectrum sensing in recent years in
Table 1, which shows the main contributions of each paper and the research focus. The table shows that the earlier literature [
18] provides an overview of traditional spectrum-sensing algorithms and presents future challenges. Ref. [
19] further validates the effectiveness and shortcomings of some well-established SS-CRN techniques through simulations. Refs. [
20,
21] focus on the application of machine learning in CSS and performance comparisons of different machine learning algorithms without further summarizing the development of deep learning in this direction. Whereas Refs. [
22,
23] focus on the application of deep reinforcement learning (DRL) in SS and deep neural networks in SS, the former does not further summarize the development of deep neural networks in the field. At the same time, the latter lacks an overview of the application scenarios and the main techniques of deep learning in CSS. In conclusion, given the absence of a comprehensive review of deep learning for cooperative spectrum sensing, it is imperative to undertake this endeavor to consolidate existing knowledge, bridge the gap in the literature, and drive additional advances in this promising research area.
This review fills a gap in the analysis of deep-learning-based applications in cooperative spectrum sensing (
Figure 2). The contributions of the present paper are as follows:
Traditional approaches to radio spectrum sensing are studied, and a detailed summary of the strengths and weaknesses of each method is provided.
The applications of CNNs, long and short-term memory networks (LSTMs), combinatorial neural networks, and other types of neural networks in radio spectrum sensing are described. A comprehensive review of deep-learning-based spectrum-sensing algorithms for the period 2021 to 2023 is presented.
The paper concludes with a summary of the applications, current state of research, and challenges faced by deep learning in cooperative spectrum sensing.
2. Spectrum-Sensing Methods
2.1. Spectrum-Sensing Modeling and Performance Metrics
Depending on the idle or busy state of the primary user, signal detection at the secondary user can be modeled as the following binary hypothesis testing problem shown in Equation (
1) below.
where
denotes the nth received sample,
is an additive noise following a zero-mean cyclically symmetric complex Gaussian distribution,
denotes the cognitive primary signal, and h denotes the channel gain, that is kept constant over the sensing period. In addition,
and
denote the two hypotheses of non-existence and presence, respectively, for the cognitive primary signal in a certain frequency band.
There are several main performance metrics for evaluating a spectrum-sensing algorithm: probability of detection, probability of false alarm, and probability of missed detection, etc.
Detection probability (): This is the probability that a secondary user detects the presence of the primary user when the primary user is present, denoted by .
False alarm probability (): This is the probability that a secondary user incorrectly believes that the primary user exists when the primary user does not exist, denoted by .
Missed detection probability (): This is the probability that a secondary user mistakenly believes that the primary user does not exist when the primary user exists, which can be expressed as . The sum of the probability of having a detection and the probability of missing a detection is 1, which can be expressed as .
In cognitive radio spectrum-sensing experiments, the probability of detection () and the probability of false alarm () are widely adopted as fundamental performance metrics to assess the cognitive user’s ability to detect the presence or absence of the primary signal. In general, trends in detection probability and false alarm probability are positively correlated. As the probability of false alarm increases, the probability of detection also increases. Additionally, when discussing leakage detection probability in conjunction, it is evident from that higher false alarm probabilities correspond to higher detection probabilities while leading to lower leakage detection probabilities.
To determine the effectiveness of a spectrum-sensing algorithm, the ideal scenario is to achieve both a very low false alarm probability and a high detection probability, indicating optimal performance. However, in practical terms, it is necessary to assess whether the detection probability is sufficiently high under the assumption of a constant false alarm probability.
Spectrum sensing can be categorized into two types: single-node spectrum sensing and cooperative spectrum sensing. These correspond to independent sensing by a single user and sensing by multiple sub-users, respectively [
24]. In the subsequent sections, we will focus on highlighting the single-node spectrum-sensing approaches and provide an overview of various cooperative spectrum-sensing techniques.
2.2. Single-Node Spectrum Sensing
Single-node spectrum sensing, also referred to as local spectrum sensing (LSS), is a technique focused on sensing and analyzing the spectrum at an individual node. This node can be a wireless device, a sensor, or a specialized spectrum-sensing device.
The underlying principle of single-node spectrum sensing involves sampling and analyzing the adjacent radio spectrum to extract spectrum usage information and features. These functions can be achieved using specialized software-defined radio (SDR) hardware that can receive and process wireless signals across different frequency bands. Applications of single-node spectrum sensing include:
Spectrum monitoring and management: Single-node spectrum sensing monitors and manages spectrum utilization in specific frequency bands. It uses techniques to determine the utilization, interference, and possible availability of free spectrum in that band.
Spectrum sharing: Single-node spectrum sensing enables dynamic spectrum sharing. Nodes can monitor the available spectrum and share this information with other devices or networks to improve the efficient utilization of spectrum resources.
Interference detection and elimination: Single-node spectrum awareness detects potential sources of interference by monitoring the surrounding spectrum environment and taking appropriate measures to eliminate interference. This improves the performance and reliability of the communication system.
Traditional algorithms for single-node spectrum sensing mainly include energy detection algorithms, cyclostationary feature algorithms, and matched filter detection algorithms [
25]. In the next section, these traditional methods are explained in detail, basic simulation experiments are performed, and finally, the advantages and disadvantages of each method are compared and summarized.
2.2.1. Energy Detection
Energy detection is a traditional and widely used method for spectrum sensing [
26]. It calculates the energy of the received signal in the time or frequency domain to determine the presence of an authorized user. The core idea of energy detection is to use a band-pass filter to filter the signal or noise in the non-target band and then pass the filtered signal to a power detector for power measurement. Finally, the threshold set in advance is used to determine which state of
or
the PU signal is in. If the detected energy is greater than a set threshold, the primary user is in the busy state
and, vice versa, in the idle state
. This approach is characterized by its simplicity and user friendliness, as illustrated in
Figure 3.
The energy detection technique has the advantages of simplicity of implementation, low hardware cost, and the fact that it does not require a priori knowledge of the primary user’s signal. However, it also has some drawbacks. The inability to distinguish between different types of signals, such as broadcast and noise, makes it susceptible to false alarms or false positives. In addition, energy detection is less sensitive in high-noise environments and may miss the detection of low-power signals [
27]. Overall, the energy detection technique is one of the most fundamental techniques in spectroscopy, which is simple in principle and suitable for spectroscopic detection tasks in low-SNR environments. However, due to its susceptibility to noise and interference, its practical application needs to be combined with other signal identification and analysis techniques for comprehensive applications.
Conventional energy-sensing methods typically use a single detection threshold, which can result in reduced detection performance. The authors of [
28] used double-detection thresholds to improve detection performance and improved the K factor to change the confusion state between the two thresholds and obtained better performance than the single-threshold energy detection method at low signal-to-noise ratios. Although another researcher in [
29] also uses double-detection thresholds but combines it with the Copula function to propose a new method and performs an experimental simulation under the orthogonal frequency division multiplexing (OFDM) system under the Rayleigh fading channel, which significantly improves performance over the traditional dual-threshold energy detection method. While the work of Wu, W differs from the previous two, in [
30], he proposed a method for detecting energy enhanced by intelligent reflecting surface (IRS) based on IRS enhancement; a closed-form expression for the mean detection probability is derived using the gamma distribution approximation and the central limit theorem, and simulation results show that the proposed method outperforms the benchmark scheme’s energy detection method.
2.2.2. Cyclostationary Feature Detection
The cyclostationary feature detection technique is a common method in spectrum sensing, which uses the statistical characteristics of modulated signals to show the periodicity of detection [
31]. Since most random signals have first- or second-order statistical characteristics after sampling, modulation, multiplexing, and other periodic transformations, additive white Gaussian noise (AWGN) is a broadband random smoothing process without cyclic smooth characteristics. Therefore, the cyclostationary feature detection technique can use the cyclostationary feature of the frequency-domain signal to separate the authorized signal from the noise signal and realize spectrum sensing. The digital realization flowchart of cyclostationary feature detection is shown in
Figure 4.
The calculation process of the cyclostationary feature is as follows, Calculate the periodic autocorrelation function of the signal:
The obtained spectral autocorrelation function is then subjected to M-times mean computation. Finally, the output is subjected to feature detection to determine whether it is the primary user signal or not and to determine the state of the primary signal.
Compared with the energy detection method, the cyclostationary feature detection method has more stable performance against the background noise uncertainty and can operate under lower SNR conditions than the energy detection method.
It should be noted, however, that the performance of the method will be worse when the signal due to background noise also has the cyclostationary feature. On the other hand, because of the need to detect the cyclostationary feature of the signal, Equations (2)–(4) show that the statistical feature requires the Fourier transform of the cyclical autocorrelation function, which has a long computation time and high computational complexity, which limits its applicability.
Existing research on cyclostationary feature detection methods is focused on combining optimization with higher-order statistical features based on other algorithms. M. Nouri, in [
32], proposed a new cyclostationary feature detection method based on the Gaussian kernel least mean square algorithm (KMLS), focusing on a segment of a 5G network band, and designed a suboptimal detector based on the KMLS. The simulation results obtained using an experimental 5G communication setup were verified, showing the effectiveness of the proposed method. In Ref. [
33], scholars extracted the cyclostationary feature from broadband signals from sub-Nyquist samples in order to identify modulation schemes with low computational complexity, and the proposed sub-Nyquist sampling structure of the wideband modulated converter (MWC) was used to perform spectrum detection with good results.
2.2.3. Matched Filter Detection
Matched filter detection is a more desirable detection method in the context of additive white Gaussian noise. This detection technique can better accommodate the variability in the amplitude, frequency, and phase of the signal, and has high detection precision and accuracy. Moreover, it can improve the robustness and reliability of detection by combining multiple matched filters to meet different practical needs. It can be expressed by the following binary judgment, Equation (
5):
The matched filter detector first calculates the correlation between the hypothesized signal and the unknown signal and then compares the output with a preset threshold. That is, the output is used in Equation (
5) for binary judgment to determine whether the main signal is in state
or state
.
The core idea is to perform correlation operations between known and unknown signals via a predefined filter to detect the presence of a specified frequency and modulation signal in a signal. The digital implementation flowchart for matched filter detection is shown in
Figure 5 below. This approach has a wide range of applications in mobile communications and radar signal processing. Although the detection performance of matched filters is relatively good, it requires prior information from the PU to design a specific filter to handle different radio environments, and hence its applicability is relatively low.
Antonio Brito et al., in [
34], proposed a hybrid matched filter detection (hybrid MFD) method based on the combination of the energy detection method and matched filter detection method, and simulation experiments on MATLAB. The results show that the proposed hybrid matched filter detection method outperforms the traditional matched filter detection method in detecting the presence of PU. While Changqing Zhang investigated the correlation between neighboring received signals under dispersive channels with the idea that different channels have different impacts on sensing, and proposed a blind matched filter (BMF)-based spectrum-sensing algorithm, in [
35], which does not need PU a priori information compared to the traditional method and based on the correlation between signals with different time delays, and proposed an improved BMF (IBMF) algorithm. The results of the study showed better detection performance compared to the traditional matched filter detection method. To improve the detection capability of matched filters, Ahmed A. Kabeel in [
36] proposed a multiple antenna element (MAE)-based and matched filter (MF)-based spectrum-sensing technique, which improved the signal to noise ratio of the received signal through the enhancement in the sensing capability of multiple antennas and used the likelihood ratio for detecting the PU signals. The simulation results showed that the proposed method in this paper outperformed the single-antenna-element-based matched filtering (SAE/MF), based on a single antenna element, and other existing techniques, with excellent performance.
The advantages and disadvantages of the three traditional spectrum-sensing methods described in this section are explained and summarized in
Table 2 below.
Applications of single-node spectrum sensing in real-world communication environments will also face some situations that require further research in the future, such as the following:
PU signal uncertainty: Under the current spectrum management mechanism, each PU has absolute priority to use its working frequency band, and if a local node or secondary user requires prior knowledge of a PU’s signal, such as modulation coding method or timing, the PU is not obliged to provide it. Therefore, it is very difficult for the SUs to perceive the signal uncertainty in the PUs in the real spectrum.
Complexity of real environments: The spectrum sensing range of a single node is generally physically limited, as it may be influenced by propagation distance and large obstacles such as plateaus and trees. This limits the range and accuracy of the spectrum resources that nodes can perceive. In wide area communication systems, multiple nodes may need to be deployed to extend the sensing range.
Spectrum resource competition: A single node performing spectrum sensing may compete with other devices for the same spectrum resources. This can lead to a decrease in the accuracy of the spectrum sensing and may require additional coordination mechanisms to manage the allocation of spectrum resources.
2.3. Cooperative Spectrum Sensing
Since spectrum sensing receives the influence of channel multipath fading, shadow effects, and receiver instability in practical application scenarios, some scholars have proposed the theory of cooperative spectrum sensing. The core principle of cooperative spectrum sensing is to share the sensing information of all users, which enables more accurate detection of the spectrum state of PUs with monitoring data. When spectrum sensing is performed, all cognitive nodes will not be in a deep fading state or outside the transmitter coverage of the authorized user at the same time. Therefore, multiple cognitive nodes cooperatively sensing an authorized user’s operating frequency band in a specific space at a specific time can achieve spatial diversity, thus alleviating the problems encountered in single-node spectrum sensing and improving the detection performance of spectrum sensing [
37].
Cooperative spectrum sensing has two key steps: The first step is to collect and fuse the user’s local sensing data. The second step is to adjudicate the channel state, which maximizes the impact of poor-quality data on sensing, thus eliminating noisy signals and interference from malicious users.
The performance of cooperative spectrum sensing not only depends on the sensing algorithm of a single node but also has higher requirements for the optimization of the sensing data fusion algorithm for secondary users. The data fusion algorithms for cooperative sensing are mainly classified into two types: the hard data fusion criterion (hard fusion, HF), and the soft data fusion criterion (soft fusion, SF). Comparing the two data fusion schemes, hard fusion has a better detection performance due to multiple judgments, while soft fusion requires a larger bandwidth as a control channel due to the global judgments made by the fusion center, which results in a larger network load [
38].
The different ways of sensing information through the interaction of each sensing node under the cooperative sensing framework are mainly categorized into centralized cooperative spectrum sensing, distributed cooperative spectrum sensing, and relay-assisted cooperative spectrum sensing, and several spectrum-sensing modes are described in detail and reviewed in the following sections.
2.3.1. Centralized Cooperative Spectrum Detection
Under the centralized cooperative sensing framework, there exists a cognitive base station, the fusion center, which is responsible for controlling and coordinating the whole sensing process. The basic idea is that multiple terminal devices work together to jointly sense the surrounding spectrum environment. These terminal devices feed spectrum-sensing information to a central node responsible for spectrum processing and allocation.
Figure 6 shows the basic model for centralized cooperative spectrum detection.
Centralized cooperative spectrum sensing can effectively manage the cognitive nodes involved in the collaboration and reduce the requirements on the individual cognitive nodes in terms of detection accuracy, energy consumption, and computational power. At the same time, the accuracy of spectrum sensing can be improved by fusing the heavy sensing information collected by the central node. Therefore, a large portion of the current research is based on the system model of centralized cooperative spectrum sensing. Woongsoo Na, in [
39], proposed a centralized cooperative directional sensing technique for cognitive radio networks using directional antennas for spectrum sensing. The sensing information is collected from the auxiliary nodes by FC, and the gradient descent algorithm is refined to solve the nonlinear optimization problem. Simulations show that the proposed method is applicable to existing CR environments. Since CSS methods may suffer from, for example, network attacks like sensed data forgery (SDF), Sadia Khaf, in [
40], proposed a scalable, partial CSS algorithm that is able to improve the sensing accuracy while reducing the sharing overhead, and the results show that the performance of the proposed algorithm is proportional to the number of devices and that it is suitable for multi-device connectivity. As for the underwater cognitive network environment, Changho Yun, in [
41], proposed an underwater cooperative spectrum-sharing (UCSS) protocol for centralized underwater cognitive acoustic networks, which can effectively utilize non-proprietary hydroacoustic frequencies by periodically detecting the random appearance of interference, and two heuristic resource allocation algorithms of multi-round RA (MRRA) and mono-regular RA (SRRA), and the results show that MRRA outperforms SRRA in a variety of scenarios and is superior to SRRA.
2.3.2. Distributed Cooperative Spectrum Detection
Unlike centralized cooperative spectrum sensing, distributed cooperative spectrum-sensing networks do not require wired infrastructure support or data fusion centers. The basic process of distributed cooperative spectrum detection is as follows: in the sensing environment, each local node first senses independently, then each node shares the sensed data with each other, and finally, each local node combines all the received sensing information to make a final judgment.
Figure 7 below shows the basic model for distributed cooperative spectrum detection.
Although compared to centralized cooperative sensing, distributed cooperative sensing does not rely on data fusion centers to make cooperative decisions; local cognitive nodes need to interact more regularly with local sensing information, which puts higher demands on control channel resources. In order to improve the reliability of robust cooperative spectrum sensing in dense network environments, a current data fusion scheme based on clustering algorithms and distributed sensing by Rania A. Mokhtar et al. [
42] is suitable for environments with a high degree of relay channel fading and is designed to distribute the clusters and select the fusion nodes (FNs) in two phases. The results show that there is an improvement of 0.42 in the error through the two processes; moreover, the detection sensitivity is also improved to 0.95. Multi-frequency CSS is also a research focus in CR networks, where SU scheduling with a subset of channels in a distributed CR network poses a strong challenge. To address this difficulty, Anastassia Gharib, in [
43], proposed a two-stage multi-frequency CSS scheme where, in the first stage, a master channel is selected for each channel by optimization, and then collaborating SUs are selected for each channel. The second stage allows the original SUs to participate in the sensing process. It is shown that this scheme minimizes sensing consumption compared to existing schemes.
2.3.3. Relay-Assisted Cooperative Spectrum Detection
Relay cooperative spectrum sensing is a technique that concerns collaboration among multiple relay nodes for dynamic spectrum allocation in radio communications, primarily for channel fading and shadowing problems. Since in real communication situations, CR users encounter both superior and inferior sensing and reporting channels in detection, CRs interact with the fusion center through relay nodes for sensing information so that they can cooperate and complement each other.
The basic principle is that the relay node monitors and collects perceptual information from the surrounding local nodes by monitoring and collecting metrics such as spectrum utilization, signal strength, and interference level. This information can be transmitted via wireless links or alternative communication methods to the fusion center, which performs an information fusion analysis to determine the available free spectrum and then sends the scheme to each relay node to guide each CR to make policy adjustments. The relay-assisted cooperative spectrum-sensing detection model is shown in
Figure 8.
Due to its network topology and management complexity, namely, in large-scale networks, the management and maintenance of such systems can be complex and challenging, including network topology design, communication protocols, and resource allocation. Relay-assisted cooperative spectrum sensing still has great potential for research and development.
2.4. Summary of Conventional Spectrum-Sensing Methods
Since some spectrum-sensing methods perform well only under specific conditions, we need to select appropriate methods for different task conditions or different environments.
Single-node spectrum sensing is mainly suitable for resource constraints, low interference, a relatively stable spectrum environment, and simple spectrum detection tasks. When there is a lot of interference or the spectrum conditions change quickly, or when the network is very big, choosing cooperative spectrum-sensing methods can make it possible to sense a wider range of frequencies and perform more complicated tasks like spectrum sharing and interference suppression.
To further summarize the various algorithms in traditional spectrum sensing and to show more clearly the main differences and application scenarios between single-node spectrum-sensing methods and cooperative spectrum-sensing methods, we summarize the above-mentioned methods in
Table 3.
3. Deep-Learning-Based Spectrum-Sensing Methods
Deep learning, as a fresh development direction of machine learning, made its rise in 2012 when deep learning in the ImageNet competition [
45] achieved the best results. Immediately following, in 2016, the artificial intelligence AlphaGo defeated the world champion Lee Sedol [
46] in the world Go competition, which inspired another round of investment in deep learning and the third wave of artificial intelligence. On 30 November 2022, ChatGPT [
47], a large language model based on the Transformer neural network architecture released by OpenAI, began to seriously ignite the attention and discussion of people all over the world about AI and the deep learning technology behind it.
Deep learning is not only fully developed in the fields of large language modeling and computer vision, but also in the field of communication. There are more and more scholars conducting in-depth research on it [
48]. In the communication domain, deep learning has been applied mainly in the branches of channel estimation, signal detection, communication system optimization, and cognitive radio.
For example, spectrum sensing in cognitive radio can be used to optimize performance using deep learning techniques, and deep-learning-based spectrum sensing has higher accuracy and robustness than traditional spectrum-sensing methods. Essentially, deep-learning-based spectrum sensing is a sensing method that is known to extract statistical properties or higher-order statistical properties of the received signal to learn classification. A deep neural network learns by feeding features of a particular signal, and the trained neural network is able to perform perceptual recognition without prior information about the received signal. The deep-learning-based spectrum-sensing model is shown in
Figure 9.
The current research on deep learning in spectrum sensing mainly focuses on several popular and high-performing networks, and the next section focuses on the application of several typical deep learning neural networks in spectrum sensing, such as CNNs, ResNet, LSTM, and other deep learning neural networks.
3.1. Application of Convolutional Neural Networks to Spectrum Sensing
3.1.1. Convolutional Neural Networks
A convolutional neural network is a kind of artificial neural network (ANN) and also one of the most common networks in the field of deep learning [
50]. Due to its properties and advantages, such as efficient processing of grid-structured data and automatic feature learning, it has achieved excellent performance in various domains and is particularly popular in the fields of object detection, image recognition, and speech recognition.
The convolutional neural network architecture consists of three main parts: convolutional layers, pooling layers, and fully connected layers. Its basic network model is shown in
Figure 10. The role of the convolutional layer is to extract the different features of the data that were passed in the previous layer, and the pooling layer will extract the salient features and reduce the spatial dimension of the data after the convolutional layer, but it also introduces a certain information loss. Moreover, fully connected layers typically combine all the previously extracted feature data into global features in the last part of the network architecture and finally complete the recognition and classification based on different features.
A CNN is normally used as the preferred network for image processing, which can accurately extract feature information for 2D images [
51], while in the study of spectrum sensing, researchers commonly convert the received signals into 2D data for statistical feature extraction, or obtain the spectrogram of the signals through a short-time Fourier transform, which can be viewed as an image, thus transforming the spectrum-sensing problem into an image recognition problem.
3.1.2. Spectrum-Sensing Method Based on Convolutional Neural Network
The spectrogram shows how the frequency and energy in the signal relate to each other. Signals with different modulations have different spectrogram distributions with unique properties. This lets the CNN pull out the most important parts of the signal for the classification task.
Scholars typically analyze the time domain and frequency domain information of the signal features by using the short-time Fourier transform (STFT) [
52] to obtain the spectrogram of the signal. Therefore, the spectrum-sensing problem can be transformed into an image recognition problem by a CNN.
The short-time Fourier transform works by multiplying the signal function by each time window function to make a one-bit Fourier transform. The time window function is then moved along the time axis to divide the signal samples into blocks, which are represented by a series of spectral functions. These results are then unfolded to make a two-dimensional spectrogram. The formula for the short-time Fourier transform is shown in Equation (
6) below, where
is the source signal and
is the window function.
In this paper, the signal and noise data are generated in MATLAB, baseband samples are processed by discrete Fourier transform, then the amplitude of the samples are de-squared, and finally, spectrograms are generated for 0–255 pixel intensities.
Figure 11 shows the the signal’s spectrogram at −5 dB and the noise-only spectrogram.
Zhibo Chen et al. [
53] first proposed a spectrum-sensing method by applying STFT to a CNN. They obtained the time–frequency matrix of the signal by applying STFT to extract the signal’s features. Since the time–frequency resolution depends on the length of the window function, it was found through a large number of simulations that it was best when the sampling length was 128 and the window length was 32. By obtaining the time–frequency matrix of the low-communication signal and then normalizing it to obtain the gray-level time–frequency image, the value of the time–frequency in the state of H0 containing only noise does not have too much difference, while the value in the state of H1, containing the PU signal and noise, is more prominent than the other bands, which enables the CNN to implement the problem of classifying the signal in the two states of H0 and H1. The simulation results show great robustness to the SNR and a large performance improvement for the general CNN method at a low SNR of −20 dB to −5 dB, achieving 98.1% Pd at 0.1 Pf.
Unlike the former study of Zhibo Chen et al., who used the time–frequency matrix of the signal as the CNN input, Walid El-Shafai et al. [
54] proposed an efficient CNN-based SS model that directly uses the spectrogram of the received signal as the input to the CNN for feature extraction, and the network is trained using PU signals at different SNRs. In order to obtain the optimal number of convolutional layers and epochs, the experiment is divided into two models. The first model has a layer with 32 convolution kernels and 40 epochs, and the accuracy of the model is tested at SNR = −5 dB to −20 dB, and the results show that the model accuracy drops from 65% to 52%. The model proposed in this paper gradually increases the number of layers from the first model and conducts experiments to gradually achieve 98% accuracy and about 1% model loss, and the experimental results show that as the SNR of the PU signal decreases, the accuracy of the model is not affected, and the model can also have 98% accuracy at SNR = −20 dB, which is a large performance improvement compared with the method above. This method has a better detection effect at low SNRs.
Moreover, using the spectrogram as an input to the CNN, in order to generate high-fidelity data for augmenting the training samples, Lianning Cai et al. [
55] proposed a spectrum-sensing convolutional neural network (S-CNN), which is innovative in the sense that the advanced deep convolutional generative adversarial network (DCGAN) is introduced for the first time in the proposed perceptual system. The spectrograms are first obtained by a short-time Fourier transform, then additional data are generated using DCGAN’s data augmentation technique, and finally, the total dataset is used to train the S-CNN. Since the proposed model is a data-driven model, an efficient threshold-based detection mechanism is designed for online testing, while the former is used for offline testing. The experiments compare the performance of the CNN model without data augmentation with the DCGAN-based S-CNN proposed in this paper, and the results show that the accuracy of the model in this paper has a 10% accuracy improvement over the first model, and the detection of the generated signals, such as BPSK, QPSK, and 8PSK, shows that there is essentially no difference in the performance, which suggests that the model is insensitive to the modulation order of the modulated signal.
- 2.
A CNN-based spectrum-sensing method with statistical features of signals
For the powerful feature extraction learning ability of the CNN, scholars commonly use various statistical features of received signals as inputs to the CNN for network training, and the trained network is tested for sensing of data test sets. This paper will introduce CNN-based spectrum perception methods based on various statistical features in the next subsection.
- (1)
Covariance matrix
The field of signal processing primarily uses covariance matrices to describe correlations and variances between different dimensions or different time points in a signal. The covariance matrix reflects crucial information about the second-order statistics of the signal, acting as a statistical property of the signal itself. It serves as a statistical property of the signal and provides crucial information about the second-order statistics of the signal. Currently, it has been found that, in general, the covariance matrix of a signal sample can be used for spectral sensing with better detection performance than several conventional methods in the presence of a low SNR and noise uncertainties. Moreover, a CNN has a strong ability to extract the features of matrix data; therefore, CNN-based covariance matrix spectrum-sensing methods are also being researched.
In 2019, Chang Liu et al. introduced a data-driven spectrum-sensing method based on the covariance matrix in their published paper [
56]. The proposed method utilizes the sample covariance matrix as input for a CNN to obtain test statistics. In the offline training phase, a threshold-based detection mechanism is designed, and the cost function for training the spectrum sensing model is derived using the maximum a posteriori (MAP) criterion. This case allows for the optimization of the test statistics. The experimental results demonstrate a significant performance improvement in terms of detection probability compared to several additional methods, such as energy detection (ED) and block coordinate energy detection (BCED), across the detection probability range of 10
to 100. The proposed method achieves comparable performance to state-of-the-art E-C detection methods.
Qi Wang et al. [
57] also use the covariance matrix of the samples as a test statistic and a CNN to extract key features. In order to further improve the performance, the classifier is trained as the input of a support vector machine (SVM) in the fully connected layer, which is one of the innovations in this paper. The specific operation is to replace the loss function softmax in the original CNN with an SVM, and then use the feature vectors obtained from the covariance matrix of the CNN as training data for the SVM to obtain the classifier. The experimental results show that as the number of training times of the proposed model network is gradually increased to about 45, the detection probability of the spectrum-sensing model is stabilized at 96%, and the performance of the false alarm probability is fixed. Compared with the separate CNN and SVM algorithms, there is a performance enhancement in the detection at a low SNR.
Most of the recent research in this area has been on single-band spectrum sensing. In the real world, however, many situations involve multiple antenna sub-users sensing several bands in a row that are occupied by multiple PUs and need higher opportunity throughput to achieve dynamic spectrum access. To solve this problem, Jintao Zhang et al. proposed a multi-band spectrum-sensing method based on a CNN with a covariance matrix (MJCM-CNN) in [
58]. The difference compared to the single-band spectrum sensing in [
57] is that this method needs to consider the correlation information between each sub-band, so the feature extraction of the covariance matrix of the multiband by the CNN can effectively learn the correlation information between each sub-band. Since spectrum sensing for each sub-band individually leads to under-utilization of the information between two consecutive frequency bands, this paper achieves joint multi-band spectrum sensing by connecting all covariance matrices into the frequency band covariance matrix array R. The experimental results show that the performance of the MJCM-CNN proposed in this paper is significantly better than the CM-CNN method mentioned in the previous literature [
56] in the range of −20 dB −16 dB SNR, and it is significantly ahead of the traditional spectrum-sensing methods.
Moreover, Yanyan Duan et al. utilize the method in their 2023 article [
59]. Their main focus is on the application of deep learning for spectrum sensing in connected vehicle communications. The objective of their study is to enhance spectrum utilization for connected vehicle communications. Unlike all of the above methods, this article uses kernel principal component analysis (KPCA) nonlinear mapping to extract feature vectors from the sampled signal covariance matrix, mapping the raw data to a higher-dimensional data space in order to analyze the sampled signal data. This case has the advantage of large immunity to noise in complex and variable communication environments, where the covariance matrix is constructed, and then singular value decomposition is performed to obtain the feature vector that distinguishes the sampled signal from the noise. Experiments with modulated signals such as 2FSK, QPSK, etc., at different SNRs are compared with methods based on SVM, LeNet5, etc., and it is shown that the proposed algorithm achieves 100% detection probability when the SNR is above −3 dB.
- (2)
Spectral correlation function
By Fourier transforming a signal’s autocorrelation function, one can obtain the spectral correlation function (SCF), also referred to as spectral correlation density. It is commonly used in the modern signal processing community to describe the spectral properties of periodic statistical signals, and in recent years, some scholars have combined SCF with CNN for spectrum sensing.
In 2021, Kursat Tekbiyik et al. proposed a CNN-based spectrum sensing model utilizing the spectrum correlation function in their paper [
60]. The SCF is used as input to the proposed CNN model. To enable signal recognition and spectrum-sensing experiments in two different scenarios, the first scenario involves training a CNN for signal classification by extracting cyclic spectra of GSM, UMTS, LTE, and the spatial spectrum. In the second scenario, the cyclic spectra of relevant signals were input into a CNN detector to detect the presence of primary user (PU) signals. If a PU signal is detected, the next-level CNN classifier is activated to determine the type of PU signal, enabling spectrum sensing and signal recognition. The experimental scope of this model is in the range of cellular signals and is applicable to any signal exhibiting cyclostationarity. The experimental results demonstrate superior performance in rigorous channels compared to methods such as support vector machines (SVMs) and cyclostationary feature detection (CFD). The model employs supervised learning, and future improvements in its performance can be explored using unsupervised learning techniques.
The authors Keunhong Chae et al., in [
61], considered spectrum sensing in the application scenario of a multi-antenna transmitter. The researchers propose a deep spectrum-sensing (DS2MA) system that employed a multi-antenna receiver with multiple antennas. The innovative idea of the paper is to construct a correlation matrix through the autocorrelation function of each antenna and the antenna-to-antenna inter-correlation function, which is used as an input to the proposed CNN model, and the cross-entropy function [
62] is used as the loss function in the training phase. The simulation results show that at low SNRs, the model proposed in this paper using the autocorrelation function with the mutual correlation function optimizes the performance of the DS2MA model with a detection probability of 0.4 over the DS2MA model using only the autocorrelation function, and also improves dramatically compared to the CM-CNN and the conventional ED.
Cognitive radio and efficient dynamic spectrum access play an essential role in wireless network communications for post-disaster reconstruction. In 2023, in order to improve the previous cellular network system by providing hotspots and network coverage during post-disaster scenarios, M. Suriya and M. G. Sumithra, in a paper presented at the EAI International Conference on Innovations in Sustainable Cognitive Computing Big Data [
63], proposed a CNN-based cooperative spectrum-sensing approach for flying cell towers (FCTs). Flying cell towers are multiple UAVs deployed as spatial base stations and connected to terrestrial cell towers, and the data provided by these devices is used to train CNNs to better predict terrestrial user behavior. They exploit the cyclic autocorrelation function, spectral correlation function, and energy function to extract diverse features of the cyclostationary signal, enabling the discrimination of the PU signal from noise. Their simulation results show that with a training rate of 300, the model achieves 90.68 percent accuracy and achieves performance improvement in the low-SNR range.
In this paper, we summarize the CNN-based spectrum-sensing methods in the past five years; see
Table 4. CNNs have achieved great results in obtaining time–frequency information through signal spectrograms for spectrum sensing. Moreover, better detection performance can be achieved by obtaining the statistical feature quantity of the signal for learning to realize spectrum sensing through methods such as SCF or covariance matrix.
3.1.3. Residual Network
Residual network is a variant of a convolutional neural network, and was proposed by Kaiming He et al. in 2015 [
64], aiming to solve the vanishing gradient problem in deep networks due to the inability to pass the data effectively. That is, modules of residual connections and residual blocks are introduced on top of the CNN to allow the network to selectively pass the residuals or bypass some layers, thus alleviating the vanishing gradient problem and also being able to better train the network. The residual block diagram is shown in
Figure 12.
Recently, residual networks have been used by several authors in the field of spectrum sensing and combined with additional techniques to achieve respectable results, as detailed in the next section.
3.1.4. Application of Residual Neural Networks to Spectrum Sensing
Shreeram Suresh Chandra et al. conducted experiments [
65] on several methods based on energy, differential entropy [
66], geometric power [
67], and the P-paradigm [
68] using neural network structures such as DNNs, CNNs, ResNet, MLPs, etc., in order to compare the performances and study the optimal combinations of neural networks with signal processing methods. The experiments in this paper demonstrate that as the depth of a CNN increases, its performance also increases, but the vanishing gradient problem also occurs, so residual blocks are introduced to solve this problem. The experimental structure shows that the performance of all DNNs is not very different at moderate SNRs, but the performance of ResNet is slightly better, and the performance of ResNet based on ES features is better than that of ResNet based on alternative features.
In order to solve the problem of predicting the load of spectrum sensing on the joint spatio-temporal domain, the authors XiangYu Ren et al. [
69] proposed a different network model, based on CNN and ResNet, that can accurately predict the spectrum usage in large regions. In order to address the incomplete power matrix, two approaches, matrix completion [
70] and local interpolation [
71], were used to reconstruct it, and the performance differences between them were analyzed. In order to more adequately test the proposed model, experiments were performed in two different scenarios: a single transmitter scenario and a multiple transmitter scenario. The experimental results showed that the proposed model provided solid predictions of the overall spectrum usage patterns, while its parameter settings depended on the characteristics of the dataset.
In 2022, the authors Jianxin Gai et al. considered the use of STFT for feature extraction of signals for spectrum sensing and proposed a spectrum-sensing method based on short-time Fourier transform with improved residual network (STFT-ImpResNet) in [
72]. The main idea of the proposed method is to process the signal through STFT to obtain a 2D time–frequency matrix and normalize it to obtain a grayscale image as input to the network. The network used is the authors’ improved ResNet, with the remaining bottleneck block as the residual block, which reduces the amount of parameter computation and improves the residual block to enhance the feature extraction ability, and finally, replaces the fully connected layer with global average pooling (GAP) to again reduce the training parameters and the risk of overfitting. The experimental results show that STFT-ImpResNet outperforms SVM, ED, and STFT-CNN in terms of detection probability at −19 dB SNR for a certain false alarm probability, with a 94.5% detection probability for this model for a false alarm probability of 0.01.
STFT cannot vary with time and frequency as required, resulting in a window fixation problem. Therefore, unlike the above authors, who combined STFT with ResNet, in [
73], Pan Zhen et al. proposed a spectrum-sensing method (WT-ResNet) based on combining wavelet transform and ResNet for signals with non-smooth features, which is also a data-driven algorithm based on fully blind detection without a priori information. Since numerous signals are non-smooth in practical situations, the drawback of using STFT to implement non-smooth signals is the restriction that the window function cannot be frequency-shifted. Therefore, the authors consider the use of the wavelet transform (WT) [
74] method. By making WT available to provide wavelet bases, the wavelet bases can be varied with the desired frequency and time, thus overcoming the problem of the fixed window function. The main idea is to process the signal through WT to obtain the time–frequency matrix and, thus, as a statistic, use the BP algorithm to train the model in the offline phase and use the received data in the online phase for detection. Experiments were conducted to compare the performance of the model proposed in this paper with traditional ED, BCED, CNN, and STFT-CNN, and the results show that the extraction of signal features by wavelet transform can effectively improve the Pd, and the detection probability of WT-ResNet is higher than that of the other four methods for SNRs ranging from −20 dB to −10 dB, with the largest gap at −20 dB.
The works reviewed above are summarized in
Table 5, from which it can be seen that ResNet-based spectrum-sensing methods typically learn the time–frequency information in the signal and, in particular, extract deep features from 2D spectral data. The introduction of ResNet enables deeper networks by efficiently solving the gradient vanishing and gradient explosion problems in deep networks. When there is a large amount of training data, similar to LSTM, both can have excellent adaptive ability to learn and adapt to various spectrum environments. However, the choice of whether to use ResNet in practical applications depends on the specific application scenario, available data, and computational resources.
3.2. Application of Long Short-Term Memory Networks to Spectrum Sensing
3.2.1. LSTM
Recurrent neural networks (RNNs) are another commonly used form of deep neural network used in the field of spectrum sensing; they are more adept at processing time-series signals [
75]. In general, an RNN can provide a better channel selection strategy for cognitive radio by exploiting historical information to predict the future utilization of a certain band. Alternatively, it can help to detect and identify potential sources of interference by analyzing time series in the spectrum.
In practice, spectrum sensing is also critical for tasks that require processing lengthy sequences with long-term dependencies and learning from complex and noisy spectral data, where LSTMs are commonly used more regularly than RNNs.
Long short-term memory (LSTM) is a special type of recurrent neural network [
76]. The relationship between the internal variables of the LSTM cell is shown in
Figure 13. The memory cell of LSTM mainly consists of three types of gates, namely, the input gate, forget gate, and output gate, to solve the problems of gradient vanishing and gradient explosion in traditional RNNs. The control of information transfer in the model is performed by the cell state of the cell. In the model, these gates govern the control of information transfer through the utilization of sigmoid activation functions.
Due to its excellent ability to model long-term dependencies, LSTM is more sensitive to the long-term relationships between spectrum signals and is, therefore, able to better understand and predict the dynamics of the spectrum. On the other hand, the LSTM is able to memorize the previously observed state information and combine it with the current observation information for prediction and decision making, thus completing the sensing of the spectrum state.
Broadly speaking, the research on LSTM in spectrum perception is mainly divided into two categories: one is to extract various features of the original signal data for training and learning to complete spectrum perception; and the other is to optimize the structure of the model or combine it with other suitable modules and algorithms to make the model better solve the problems encountered in spectrum perception, such as unstable perception accuracy in dynamic environments and low detection probability at low SNRs, etc. In the following, we summarize the current status of research ideas in both categories.
3.2.2. LSTM-Based Spectrum-Sensing Methods
- (1)
Explorations based on different inputs
At the 30th Annual PIMRC Conference, the authors Nikhil Balwani et al. proposed exploiting temporal correlations between spectrum data via LSTM networks, that is, by relating previous sensing events to current sensing information and feeding it into the LSTM. Moreover, in [
77], a spectrum-sensing scheme based on an LSTM network is proposed to address the problem of considering the temporal dependence of signals in cognitive radio. The results show that the proposed scheme achieves better detection performance and classification accuracy at low SNRs compared to alternative methods. However, the training time of the proposed scheme is longer, and the execution time is slightly increased. In summary, this study provides an innovative framework for LSTM-based spectrum sensing and suggests that reducing the time consumption of RNN-LSTM networks is a direction for future research. In Ref. [
78], Brijesh Soni et al. perform additional research based on the work presented in [
77]. The innovation is to improve the performance of CR by statistically calculating the activity of PUs as an input, and spectrum sensing based on PU activity statistics (PAS-SS) is proposed to improve the sensing performance. Experiments were conducted to compare the classification accuracy with the ANN-based hybrid spectrum-sensing algorithm and the random forest algorithm under the same SNR conditions, and the proposed method achieved a 10% accuracy improvement at low SNRs, which demonstrates the excellent performance of the proposed scheme in the low-SNR regime.
The author Mario Bkassiny, in [
79], accomplishes the realization of spectrum sensing through signal recognition and signal detection. The core idea of the paper is to learn both the cyclostationary features of time-discrete signals through LSTM and the original signal data, the former by classifying different signals by exhibiting different cyclostationary features. This stage is obtained using the spectral correlation function, and then the cyclic profiles of the signals are input as sequences into the LSTM. The latter learns the raw data directly. The performance of the LSTM based on the raw signal data and the method of the paper at SNR = 30 dB is compared in an experiment, showing 93.5% classification accuracy for the former and 99.8% for the latter. In summary, we can observe that LSTM exhibits greater efficiency in learning the original data.
Similar to CNN, LSTM can also learn correlated features through the covariance matrix of the signal. Wantong Chen et al. [
80] extracted spatially relevant features through the covariance matrix after dimensional changes, then learned temporally relevant features through LSTM and combined the two for joint learning, proposing a CM-LSTM method for spectrum perception, which is able to learn the spatial features of multiple signals received by antenna arrays and the temporal features of individual signals to achieve spectrum perception. The authors conducted experiments to compare the performance of the SVM, GBM, RF, and ED algorithms at the same SNR. The results show that CM-LSTM is more accurate in the SNR range from −15 dB to −7.5 dB. This result indicates that the joint learning of spatially and temporally correlated features by LSTM improves the performance of spectrum sensing considerably.
- (2)
Explore the combination of algorithms
Spectrum prediction is also a vital part of spectrum sensing, and in [
81], Ling Yu et al. proposed a different deep-learning-based method for spectrum prediction. This approach incorporates the introduction of an LSTM network as a key highlight, as it can handle time-series problems and memorize historical data, which is highly useful in spectrum prediction. By using the Taguchi method [
82], the authors provide an efficient approach for the design of neural networks that can reduce time consumption and computational resources. Based on the experimental results, we can observe that the LSTM network exhibits significant advantages for the time-series problem and outperforms the traditional MLP network in terms of prediction performance.
While the previously reviewed articles considered spectrum sensing in static environments, in [
83], G. Arunachalam et al. considered how to improve the performance of LSTM-based spectrum-sensing methods under a dynamic signal-to-noise ratio. The authors’ idea is to improve the LSTM network to adapt to the dynamic environment by first extracting the signal spectral features as LSTM inputs through CNNs and then introducing the Cuttle Fish algorithm [
84] to optimize the hyperparameters in the LSTM to improve the performance. They conducted experiments to compare the detection probability of the proposed model in the paper with CNN-LSTM, LSTM, energy detection, and cyclostationary feature detection methods, all with the same false alarm probability. The results show that the proposed method performs slightly better than CNN-LSTM, and the proposed method performs even better for spectrum sensing at several different frequencies, which indicates that the proposed method has a better advantage for dynamic spectrum sensing. In the future, the authors will consider adding reinforcement learning to further improve the performance.
As can be seen from
Table 6, scholars have mainly learned autocorrelation information among signals, correlation information between signals, or other time-series features through LSTM and achieved favorable results. On the other hand, research has shown that LSTM-based spectrum-sensing methods have some problems. For example, these methods need a lot of time and data to be trained to work well. Also, the performance of LSTM can change depending on which hyperparameters are chosen, which could mean that a lot of experiments are needed to find the best configuration. These issues need to be looked into further.
3.3. Other Neural Networks in Spectrum Sensing
In addition to convolutional neural networks and long short-term memory networks, scholars are investigating the use of additional deep neural network applications in the field of spectrum sensing, which are currently achieving some results; for example, artificial neural networks (ANNs) [
85], deep neural networks (DNNs), and generative adversarial networks (GANs), etc., An ANN is a network that mimics the working mechanism of neurons in the human brain, has strong adaptive learning capabilities, and is a fundamental network for deep learning. It mainly consists of three network structures, input, hidden, and output layers, and the current CNNs, RNNs, GNNs, etc., are variants of ANNs. Numerous academics have applied ANNs in the field of spectrum sensing in recent years with encouraging results due to its high fault tolerance and strong adaptive learning ability.
DU Ruiyan et al. [
86] proposed a spectrum-sensing method based on wavelet transform and an ANN. The central idea of the proposed method is to remove the noise in the noise-containing signal by wavelet thresholding, then to use the recurrent smooth feature method to separate the residual noise in the target signal, and finally, ANN learns the recurrent smooth feature of the signal to complete the classification. The experimental assumption is that the PU signal is a BPSK signal with AWGN, and the tests are performed in the SNR range of −20 dB to 0 dB. The simulation results show that the sample signal preprocessed by a wavelet transform through the ANN performs better than the single method of learning the signal features directly with the ANN. In the range of −20 dB to −14 dB SNR, the detection probability increased by 0.1, which reflects the advantages of the wavelet transform after signal preprocessing, but the detection performance at low SNR ratios still needs to be improved.
In 2020, A. Nasser et al. applied an ANN to hybrid spectrum sensing (hybrid SS, HSS). In Ref. [
87], in order to overcome the problem that the traditional HSS method requires the detector to extract a priori knowledge of the statistical features, an ANN-based hybrid spectrum-sensing method is proposed. The core idea of the paper is to extract the signal features through six detectors (ED, ACD, EVM, EVMM, CPSD, and GoF) to compose the test statistic input to the network for training. The experimental results show that the detection probability of the model increases with an increase in the number of detectors; the model with six detectors to extract the information has the best performance; and the detection probability of the model in the range of the SNR of −14 dB to −10 dB has the highest detection probability. This result shows that the more signal features that are extracted by the detector, the better the performance of the system.
Deep neural networks (DNNs) are multilayer unsupervised neural networks with the overall use of a layer-by-layer pre-training mechanism that are used for their excellent scalability and multi-tasking abilities and have achieved great results in the field of spectrum sensing.
In Ref. [
88], Yang Wang et al. propose that in order to solve the problem of noise uncertainty and carrier frequency mismatch in the field of spectrum sensing, two spectrum-sensing schemes are proposed, using the phase-difference (PD) feature method combined with DNN. The first scheme is a DNN-PD distribution detection method based on known carrier frequencies and phase differences, while the second scheme performs the same operation based on unknown carrier frequencies. The robust properties of the PD distribution are used as inputs in the training phase of the DNN, and it is found through simulation experiments that the proposed PDD is unaffected by noise power variations in the first scheme with known CF information, which reflects the great robustness of the method. Moreover, under the second scheme, with unknown prior information, the detection probability of the proposed BPDD improves by at least 0.1 in the SNR range from −20 dB to −5 dB compared to the existing blind sensing methods of BCSD, PDVD, and PRD. This result shows that analyzing the phase-difference distribution between a noisy scrambled signal and a Gaussian noise signal is effective for blind sensing. Unlike the former, in 2023, the author Xingjian Zhang, inspired by the fact that robust alternating direction multiplier (RADMM) [
89] can improve the robustness of the algorithm, proposed a robust recovery method for broadband spectral signals by combining the RADMM algorithm with DNN in [
90]. To stabilize the training phase of the network, they employed numerical differential gradient computation. Training and testing were conducted on real-world signal datasets, and the experimental results showed that the proposed method had a good convergence rate at low sampling and low SNRs and had reconstruction capability for sparse broadband spectrum signals.
In order to solve the target spectral domain adaptation (DA) problem in real spectrum sensing [
91], Runyi Zhao et al. [
92] introduced consistency constraints into a dual GAN to realize the TFL task, followed by the use of transfer learning (TL) [
93] in the training phase to improve the training efficiency, and finally, could realize the domain alignment generation function. Their experimental results showed that the proposed CCD-GAN outperformed the accuracy of SAGA with the same recall, which indicated that the proposed method could effectively improve the DA problem.
Realizing spectrum sensing of broadband signals with a low SNR has been a major problem in this field. In order to overcome this problem, in 2023, Xianghui Li et al. proposed a deep convolutional neural network capable of realizing time–frequency fusion that is adjustable according to different time periods [
94]. The core idea is to compress the signal using MWC to obtain the spectral matrix, use the principal component analysis (PCA) algorithm to downscale the data, and use feature extraction as the input to the network. The model proposed in this paper mainly consists of two parts: the main network is made up of multiple CNNs superimposed on each other to extract features, and the auxiliary network is used to learn the distribution pattern of the data. The pre-trained model obtains the original model through migration learning. Their experimental results show that it can achieve better perceptual performance than DCS-GAN in the case of a low SNR and low sampling channels.
This section describes the application of ANNs, which have been used more in the last few years, and deep neural networks such as GANs and DNNs, in the field of spectrum sensing. Moreover, these applications are summarized in
Table 7, from which we can find that ANN-based methods have been extensively studied in the past few years with certain results, and now they are typically combined with better deep neural networks for learning perception. Additional deep neural networks are mainly used to perform spectrum prediction and sensing by learning specific features in the signal, which have better results and require additional research in the future.
The next section summarizes the current state of research and results achieved by scholars on deep learning for cooperative spectrum sensing in recent years.
4. Deep-Learning-Based Cooperative Spectrum Sensing
All the previously introduced approaches are designed for the study and application of spectrum sensing in the context of non-cooperative spectrum sensing, whereas in real-world application scenarios, there are, in general, multiple PUs or multiple SUs communicating with each other, which can have a lot of complexity and conflict possibilities.
Nowadays, there are several modes and applications of cooperative spectrum sensing, which have been introduced earlier, in
Section 2.3. The findings indicate that the hidden node problem has emerged as a prominent problem in cooperative spectrum sensing. This is also true in real-world communication environments, where shadowing and multipath effects may affect the accuracy of sensing results. How to efficiently and rationally allocate resources to each sensing node is also an urgent issue to be addressed.
Recently, scholars have started to introduce deep learning and deep reinforcement learning into the field of cooperative spectrum sensing to alleviate or solve the aforementioned problems. For example, deep learning can optimize data fusion by automatically extracting features from the data of multiple sensing nodes, enabling the system to make more accurate judgments. Another example is that, with proper training, deep learning models can better handle and predict uncertainty in dynamic environments. Deep reinforcement learning, on the other hand, can recognize potential security threats or learn to make effective and robust decisions in CSS security scenarios through continual learning and adaptation. Thus, the security issues in cooperative spectrum sensing can be mitigated to some extent, and the current state and progress of research in recent years will be reviewed below.
4.1. Applications of Deep Neural Networks in Cooperative Spectrum Sensing
Understanding the pertinent literature from recent years has revealed that ResNet, graph neural networks, and deep neural networks are the most frequently used CNNs in cooperative spectrum sensing. The next section will summarize the research findings of academics in cooperative spectrum sensing from recent years.
In 2019, Woongsup Lee et al. considered the case where multiple SUs share sensing information to make state judgments on whether a single PU occupies more than one frequency band. They proposed a CNN-based CSS model in [
95] to improve the sensing performance and stability by considering the state and spectral correlation of the channel and extracting the data space features to be input into the optimized modest-sized CNN. The simulation results show that the method outperforms the traditional CSS methods such as K-out-of-N and SVM. The paper is also the first to apply deep neural networks to CSS.
In Ref. [
96], Zhibo Chen et al. applied it to distributed cooperative spectrum sensing by using the sample covariance matrix as a test statistic as an input to the CNN, i.e., collecting sensory information from different SUs for learning. The proposed model is CSS-CNN, and the experiments are performed under channel fading to compare with other CNN and CLDNN methods, which perform adequately at low SNRs. Whereas in [
97], P. Shachi et al. used a CNN in a centralized cooperative spectrum-sensing framework and considered spatio-temporal data, channel shadowing, and spatial correlation, and the CNN model was also trained for decision making through data fusion centers. The results show that the CNN-based framework maintains strong sensing accuracy under noisy conditions. Although the performance and complexity of CNN can be affected by noise, the results are still accurate due to the decision inputs from historical training and local user measurements.
Hang Liu [
98] focused his research on the stacking approach of fusion centers in CSS and perceived OFDM signals in CSS. Recurrent correlated feature learning is fed to a CNN, and a training database is built through a bagging strategy. The innovation is that the data fusion center with the stacked generalization approach can better learn the probabilistic prediction of PU states. The experimental results show the advantage over the traditional CSS method by showing both the detection probability and the false alarm probability.
The application of ResNet to cooperative spectrum sensing is also currently in progress. The authors Myke D. M. Valadão et al. consider experiments with neural network models placed in a CSS environment in a scenario where the user maintains a dynamic movement within that range. In Ref. [
99], they proposed a cooperative spectrum-sensing approach based on ResNet. The 3D matrix is used as the input to ResNet, conv3D is used for feature extraction, and two additional conventional CNN and RNN models are used for experimental comparison. The experimental results show that the nn-ResNet proposed in this paper has a higher accuracy of SU detection than the other two deep neural networks at noise power densities ranging from −140 to −120, and with an increase in the number of SUs, the accuracy of this model is also better than the CNN and RNN, with a detection accuracy of 97.1% for an SU number of 20.
In ICECAA 2020, D Raghunatha Rao et al. [
100] combined deep residual network and data-cleansing algorithms to design DRN test statistic refinement for a crowd sensor CSS. That is, the fused data in the CSS system is fed into the ResNet as a matrix together with the sensing information, and the data-cleansing algorithm senses the spectral availability of crowd sensors along the data fusion center to complete the statistical refinement of the DRN test. The simulation results show that the proposed model achieves better detection probability than data-cleaning algorithms and hypothesis-thresholding methods.
Graph neural networks (GNNs), deep learning models capable of learning and reasoning about graph-structured data [
101], can help sensing devices model node characteristics and support information dissemination and cooperative decision making among nodes in cooperative spectrum sensing due to their ability to represent nodes and edges as vectors or matrices. These advantages provide a new approach and tool for performance improvement in cooperative spectrum sensing. Scholars are beginning to apply GNNs to cooperative spectrum sensing.
In 2023, in order to adapt to the dynamically changing radio environment and the problem of modeling hidden node scenes, Dimpal Janu et al. proposed a model of GCN-CSS for modeling dynamic real-world scenes under multiple antennas [
102]. The GCN-CSS method has a lower computational complexity than the CNN method and still improves perceptual performance even with imperfect reporting channels. It is found that the proposed scheme provides the best performance improvement over different algorithms when the number of hidden nodes increases, and the proposed method outperforms traditional algorithms such as CNN, ANN, SVM, and K-means clustering in terms of perceptual performance. The results show that GCN-CSS has significant advantages in complex wireless environments that require dynamic adaptation and strong performance.
In this section, we present applications of deep neural networks such as convolutional neural networks, residual networks, and graph neural networks to cooperative spectrum sensing. We summarize the literature described above in
Table 8. These studies make certain enhancements to the performance of cooperative spectrum sensing in dynamic environments, and by combining them with suitable algorithms, they are able to achieve improvements in specific aspects compared to traditional spectrum-sensing algorithms.
4.2. Applications of Deep Reinforcement Learning to Cooperative Spectrum Sensing
Deep reinforcement learning (DRL) is an artificial intelligence method that combines the advantages of deep learning and reinforcement learning [
103]. Its decision making and learning in a dynamic environment fit the needs of CSS. As a result, scholars are now beginning to introduce DRL into CSS to address distributed decision making, synchronization problems, and security and robustness issues in CSS.
In Ref. [
104], Shuai Liu et al. considered cooperative spectrum sensing in multi-user scenarios and dynamic environments. Deep multi-user reinforcement learning (DMRL) with deep Q-network [
105] as the underlying framework is proposed, which is capable of determining the optimal action for each state in a relatively large, dynamic, unknown environment. After training the DDQN by training all users individually, each SU performs conflict state determination via acknowledge (ACK) signaling. In simulation experiments, the proposed method demonstrated enhanced spectral efficiency. Compared to other dynamic spectrum access (DSA) techniques, this method exhibits a faster convergence rate and superior reward performance.
Ref. [
106], on the other hand, studies the dynamic spectrum sensing and aggregation problem in a multi-channel application scenario. The dynamic spectrum environment is modeled as a joint Markov chain by feeding the observed channel state values into a deep Q-network to approximate the action-value function. They addressed the dynamic spectrum sensing and aggregation problem by formulating it as a POMDP and proposing a DQN framework. Their simulation results show that DQN achieves near-optimal decision accuracy in most scenarios, even without a priori knowledge of the system dynamics. Moreover, DQN has the lowest computational complexity and has no effect on problem scaling. Unlike the two studies mentioned above, Syed Qaisar Jalil et al. proposed a conservative Q-learning implementation of local cooperative spectrum sensing [
107]. This approach is able to learn complex data distributions more efficiently in offline DRL. The fusion center receives local sensing information from the SU to generate global decisions. They validated the proposed method through simulation experiments, demonstrating its comparable accuracy to other CSS methods and its performance improvement while reducing computation time.
Scholars such as Peixiang Cai and others, on the other hand, focus on the problem of selecting appropriate neighbor nodes in CSS under correlated fading. They introduced the coordinated graph method (CG) in [
108] to decompose the global reward into the sum of local terms, thus transforming the CSS problem into a max-plus problem that can be solved by message passing and finally combined with the QN algorithm to accelerate the convergence speed. Their experimental results show that both the flat false alarm probability and the missed detection probability of the proposed model decrease as the number of SUs increases for the same number of maximum neighbor nodes.
In a real-world cooperative spectrum-sensing scenario, the data fusion center may suffer from security attacks, such as the presence of malicious nodes that can compromise the performance of the cooperative spectrum-sensing system or the spectrum allocation. The following types of security issues are commonly found in CSS: false data injection attacks, identity spoofing attacks, and data tampering attacks. In view of these security issues in CSS, scholars have started to study related countermeasures.
Addressing the potential danger of malicious SUs sending forged data to data fusion centers to jam CSS systems, Anal Paul et al. [
109] tried to use agent intelligence in DRL to be able to effectively avoid the fake data sent to the FC. The proposed model is also based on a deep Q-network, which is made robust to fake data attacks by the experience replay (ER) algorithm. Simulation experiments show that the proposed method has a 26.58 percent higher probability of PU detection than the existing CSS method. However, there are various types of attacks on the system, and related research will continue in the future.
Multi-agent deep reinforcement learning (MADRL) is a method that combines deep reinforcement learning with multi-agent systems. Due to its excellent cooperative decision-making and distributed learning capabilities, several scholars have applied it to CSS.
Yu Zhang et al. proposed [
110] realizing cooperative spectrum sensing using DQN-based deep reinforcement learning with multiple agents. The rewarding performance is obtained by a variant algorithm, UCB-H, based on the upper confidence bound (UCB) algorithm with faster search. Their experiments compare the performance of traditional algorithms based on Q-learning and
ɛ-greedy, and numerical results show that the convergence speed of the model proposed in this paper is better than the former under the same conditions.
We can gain a better understanding of this topic by studying and synthesizing recent research by scholars in this direction. We summarize the above work in
Table 8. It is common for researchers to employ deep Q-networks or a combination of Q-learning for cooperative spectrum sensing, where a system can make decisions more accurately in a dynamic environment by combining some corresponding algorithms. The scope of spectrum sensing has been slightly reduced due to various malicious activities or unidentified obstructions. Despite the need to account for model complexity, the need for training data, and the need for computational resources in practical scenarios, deep learning offers a promising avenue for cooperative spectrum sensing that can enhance system performance in multiple ways. More research is needed in this area to provide a boost for practical applications.
Table 8.
A review of cooperative spectrum sensing based on deep neural networks and deep reinforcement learning.
Table 8.
A review of cooperative spectrum sensing based on deep neural networks and deep reinforcement learning.
| Author | Year | Module | Performance | Application Scenario |
|---|
| W. Lee et al. [95] | 2019 | CNN-DCS | DCS (HD): Pd = 95% (Pf = 0.5);
DCS (SD): Pd = 95.2% (Pf = 0.5) | Under harsh sensing conditions, CSS with correlated individual spectrum sensing. |
| Chen Z et al. [96] | 2020 | CSS-CNN | Pd = 90% (−16 dB, 20 SUs, Pf = 0.01) | Distributed secondary users accept perceptual samples in severe channel fading and shadowing environments. |
| P. Shachi et al. [97] | 2020 | CNN | Test accuracy: 98.34% (scenario 3); 100% (scenario 2) | Spectrum sensing performance analysis in dynamic scenarios with different noise floors and spaces. |
| Hang Liu et al. [98] | 2019 | EL+semi-soft FC | Pd = 96% (−18 dB, 60 SUs) | CSS for cognitive radio systems under OFDM-based signal. |
| Myke D. M. Valadão et al. [99] | 2022 | ResNet | Accuracy = 92%
(NSD: −114 dBm −174 dBm, 5 SUs) | Dynamic displacement of the user within a given area over a time period. |
| Raghunatha Rao D et al. [100] | 2022 | Deep ResNet data-cleansing algorithm | Pd = 95.78% (the matrix size of 10 × 5, Rician channel) | Sensing spectrum availability with crowd sensors via DNR. |
| Dimpal Janu et al. [102] | 2023 | GCN-CSS | Pd = 100% (−8 dB, Pf = 0.1) | Dynamics of the wireless environment in CR networks. |
| Shuai Liu et al. [104] | 2021 | DDQN | Average cumulative collision rate = 0.06.
Average cumulative reward = 0.91 | Dynamic cooperative spectrum-sensing environments where multiple PUs or multiple SUs can encounter conflicts. |
| Yunzeng Li et al. [106] | 2020 | DQN | Modified decision accuracy = 100% (index of system scenarios = 2) | Dynamic spectrum sensing in wireless networks containing N correlated channels. |
| Jalil S Q et al. [107] | 2021 | CQL | Detection accuracy = 70% (−14 dB) | Improved detection accuracy of SUs against PUs and reduced energy consumption. |
| Cai P et al. [108] | 2020 | DQN+ coordination graph | Average reward of the SUs in the CG = 0.29 (number of time slots = 1500) | Certain obstacles in the physical environment allow CR to occur under the associated decay and shadows. |
| Anal Paul et al. [109] | 2022 | DQL | Pd = 90% (−10 dB) | FC in CSS is subject to data forgery attacks. |
| Yu Zhang et al. [110] | 2019 | DQN+HCB-H | Average reward of all agents = 77% (number of time slots = 1500) | Each SU gathers information from the environment and other SUs to determine its sensing strategy, which can be structured in two different time slots. |
5. Performance Comparison of Conventional Methods and Deep-Learning-Based Spectrum Sensing
To further exemplify the advantages of deep-learning-based spectrum-sensing methods over conventional methods in terms of performance, as well as the breakthroughs in the limitations in application scenarios, we review some of the reviews and continue the comparison by summarizing them in
Table 9.
We have summarized the conventional spectrum-sensing methods in
Table 3, so we only provide a brief introduction here.
In terms of applicable scenarios, single-node spectrum sensing using conventional methods is usually more limited. Although energy detection is relatively simple and easy to implement, it can only perform well when the SNR is high and cannot be used to detect spread spectrum signals and frequency hopping signals [
111]. Energy detection tends to perform less well in environments with a low SNR or channel fading. Although cyclostationary feature detection performs best among the single-node spectrum-sensing methods and can operate at lower SNR, it requires partial information about the PU signal. Implementing it is more complex, resulting in long detection times and low network throughput. The work of matched filter detection is more demanding; not only must we know the complete information of the detected signal, but also the SNR in the environment must not be too low. So to summarize, since conventional spectrum-sensing methods usually can only exert their advantages in their specific environments, this also limits their application scenarios. It is also difficult to generalize a single traditional method to other fields.
Deep-learning-based spectrum-sensing methods usually automatically extract or learn features in signals and correlation information between signals. So they generally do not need to know the a priori information of the detected signals, thus having a wider scope for application.
In terms of performance, the three conventional single-node spectrum-sensing methods have detection performance ranging from 40% to 100% at an SNR ranging from −20 dB to 0 dB, and the energy detection method has a detection performance of only 20% at −20 dB [
18,
112]. This shows that the traditional methods perform poorly at a low SNR and are susceptible to noise variations. We reviewed the performance of deep-learning-based spectrum-sensing methods in the text above and summarized them in
Table 4,
Table 5,
Table 6,
Table 7 and
Table 8. By reviewing the previous section, we can understand that the deep-learning-based methods also perform well at low SNR ratios, with a detection probability of 85% to 90% at −20 dB and 98% to 100% at 0 dB SNR [
53,
57,
73,
78]. It can be seen that the deep-learning-based spectrum-sensing method shows a great improvement in the detection level at a low SNR and has strong robustness to noise variations.
In CSS, the introduction of deep reinforcement learning can better solve decision-making and security problems and can achieve better spectrum monitoring for more efficient spectrum utilization [
103,
104,
106].
In summary, compared with conventional spectrum-sensing methods, deep-learning-based spectrum-sensing methods can not only improve the detection probability at low SNRs but also apply to a wider range of application scenarios and, thus, help researchers solve more complex problems. Of course, current deep-learning-based spectrum-sensing methods are not without drawbacks. For example, deep learning can be limited by the computational resources of the hardware, and multiple deep learning models may be required in a wide range of spectrum-sensing environments, which can increase complexity. As well, most deep learning methods require large-scale labeled data for learning and training, which is expensive and difficult to obtain in the real world. Therefore, the development of this technology is dependent on the innovation of researchers as well as the development of hardware devices.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}