
A Novel Energy Management Control Scheme for a Standalone PV System in a DC Nanogrid



Abstract
:1. Introduction
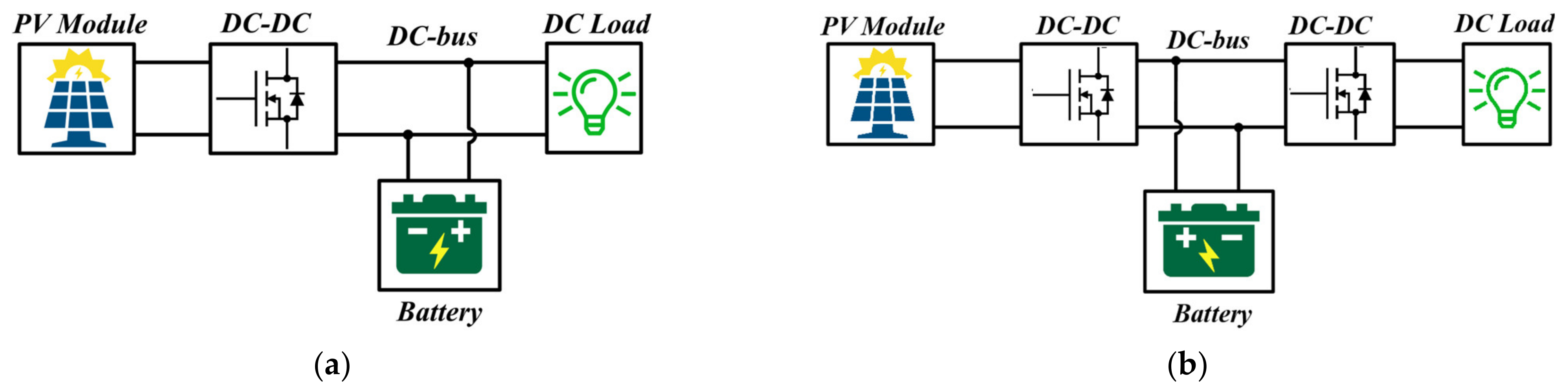
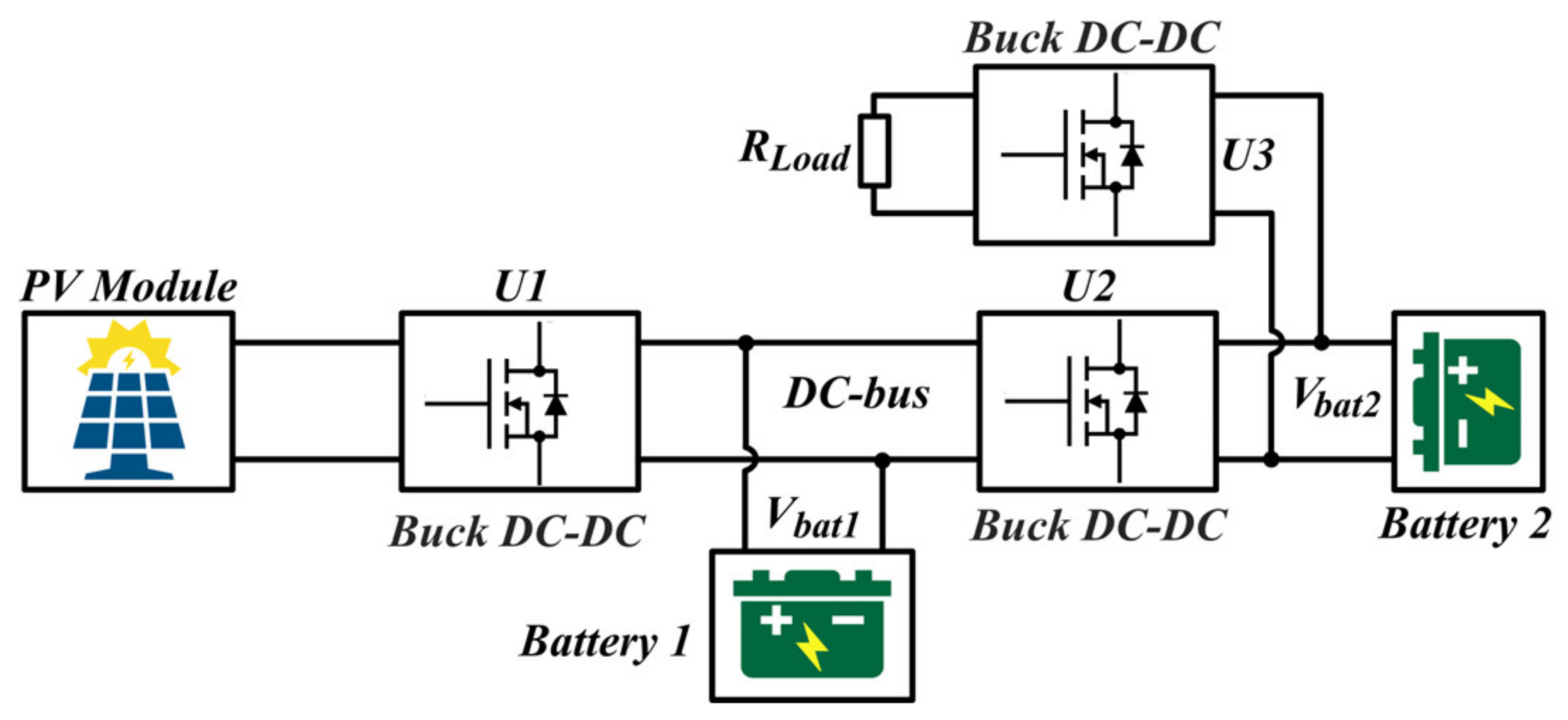
2. System Configuration and Component Modeling
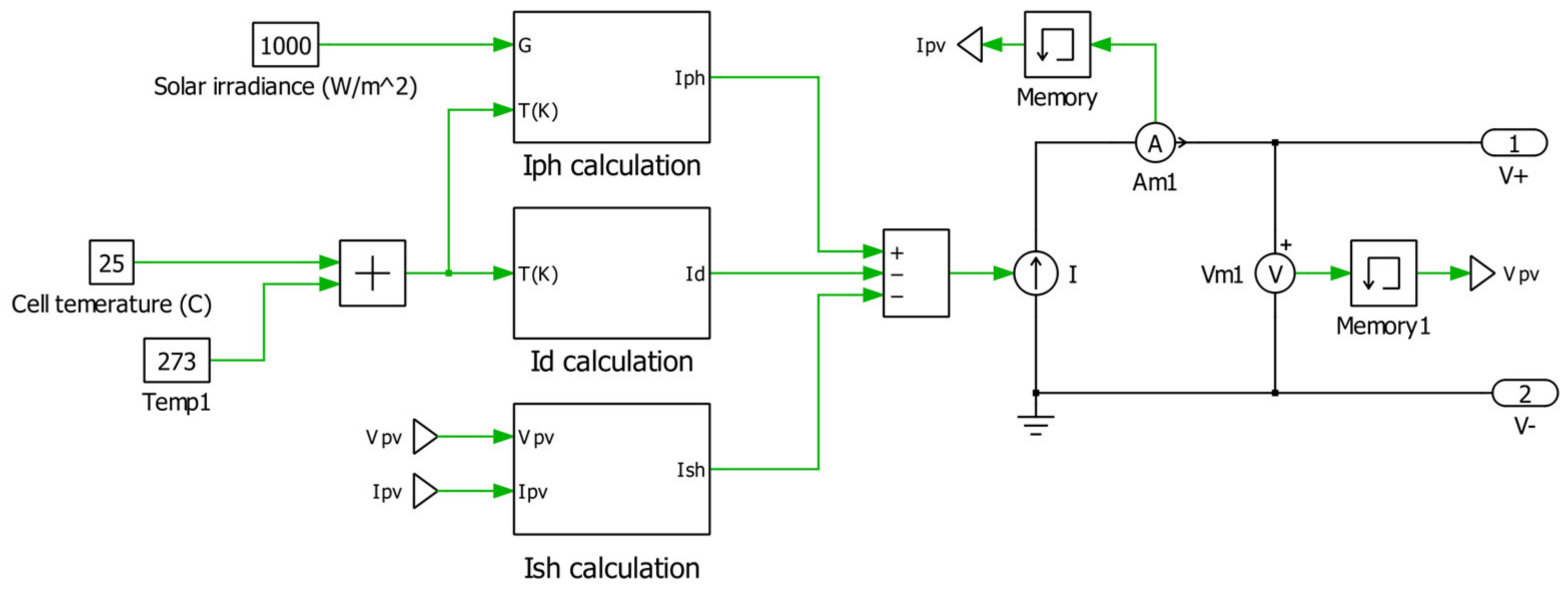
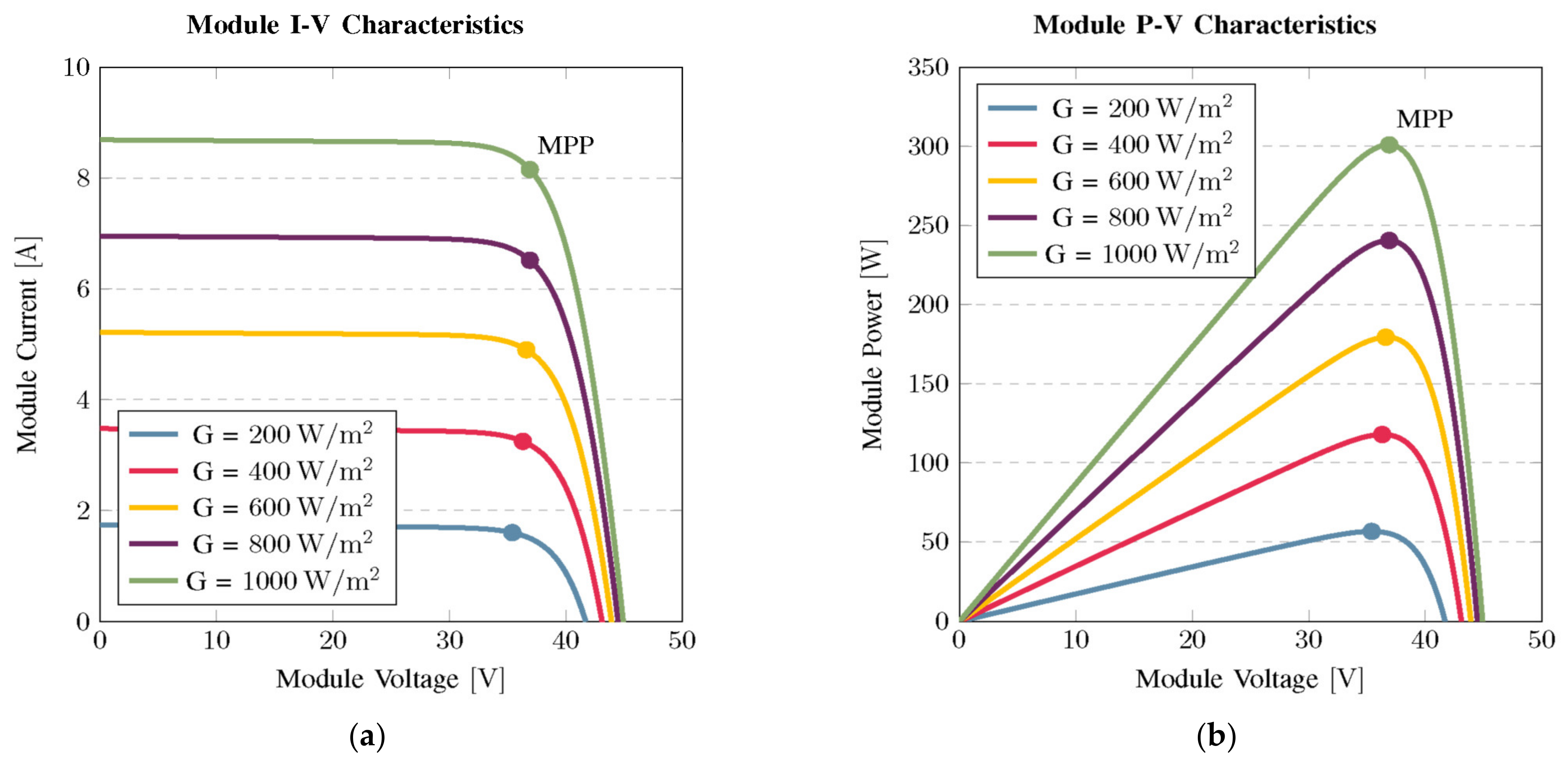
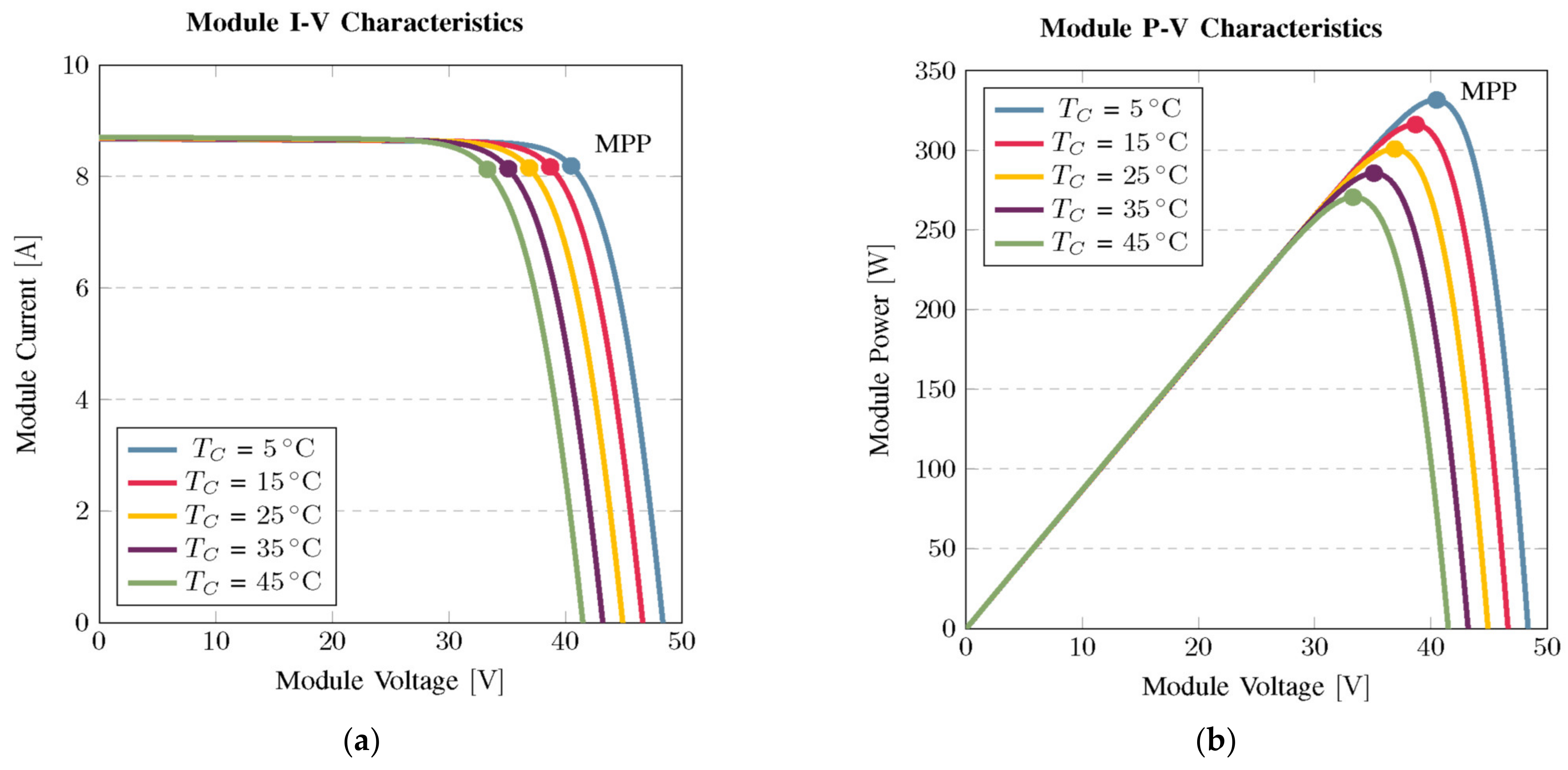
2.1. Solar PV Array
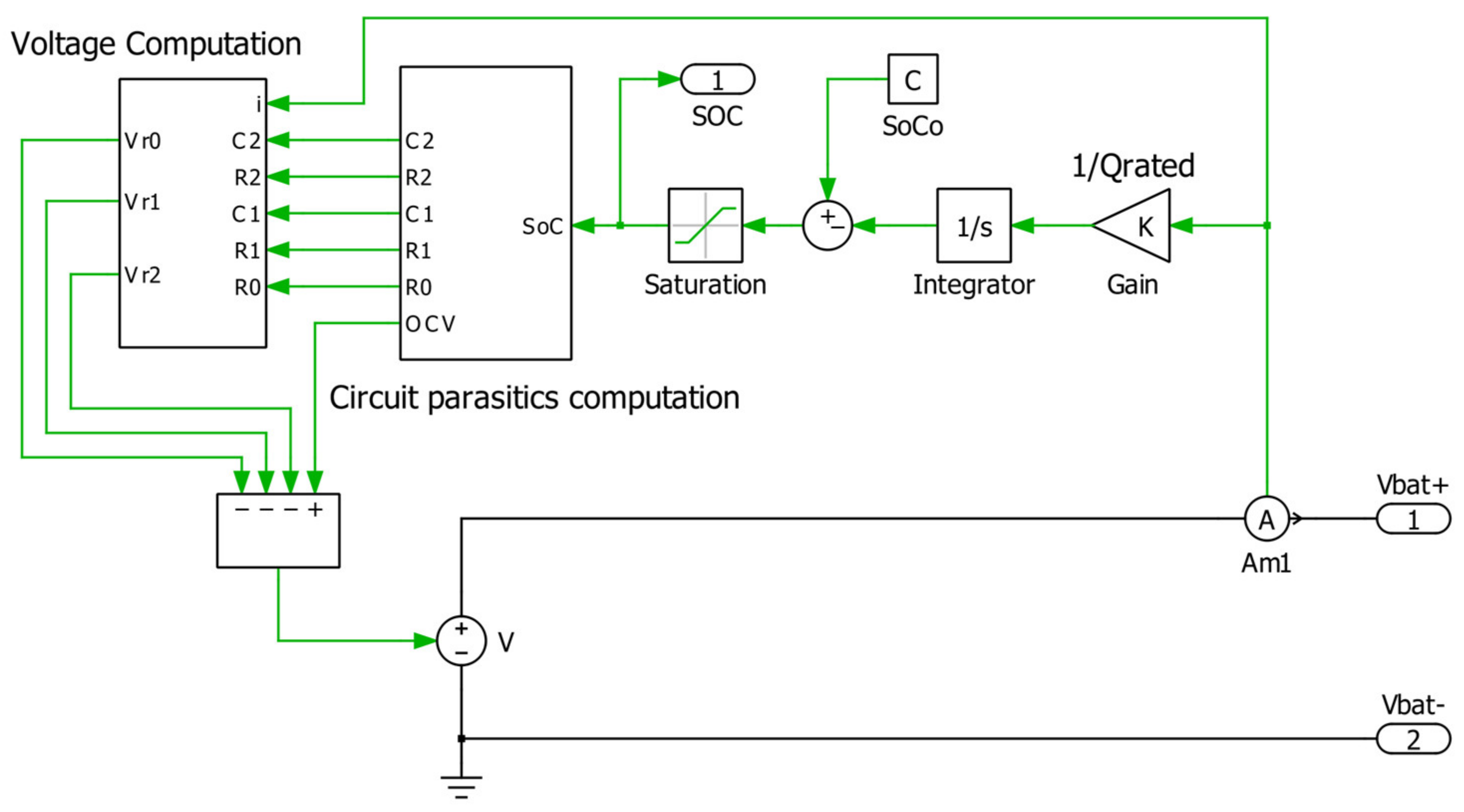
2.2. Battery Modeling
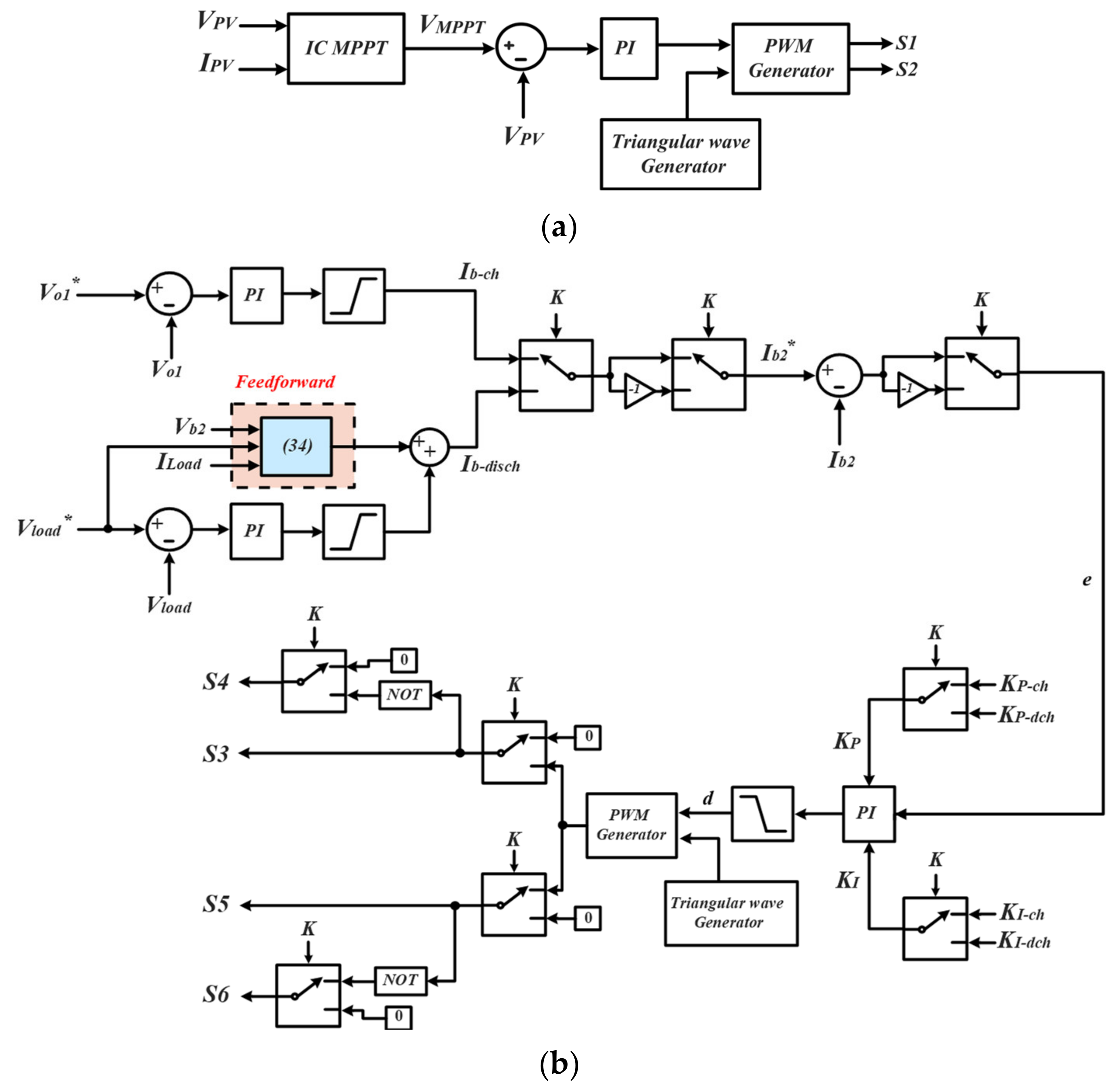
3. Power Management System
4. Small Signal Analysis of the Control System
4.1. MPPT Control
4.2. Battery 2 Charging Voltage and Current Control
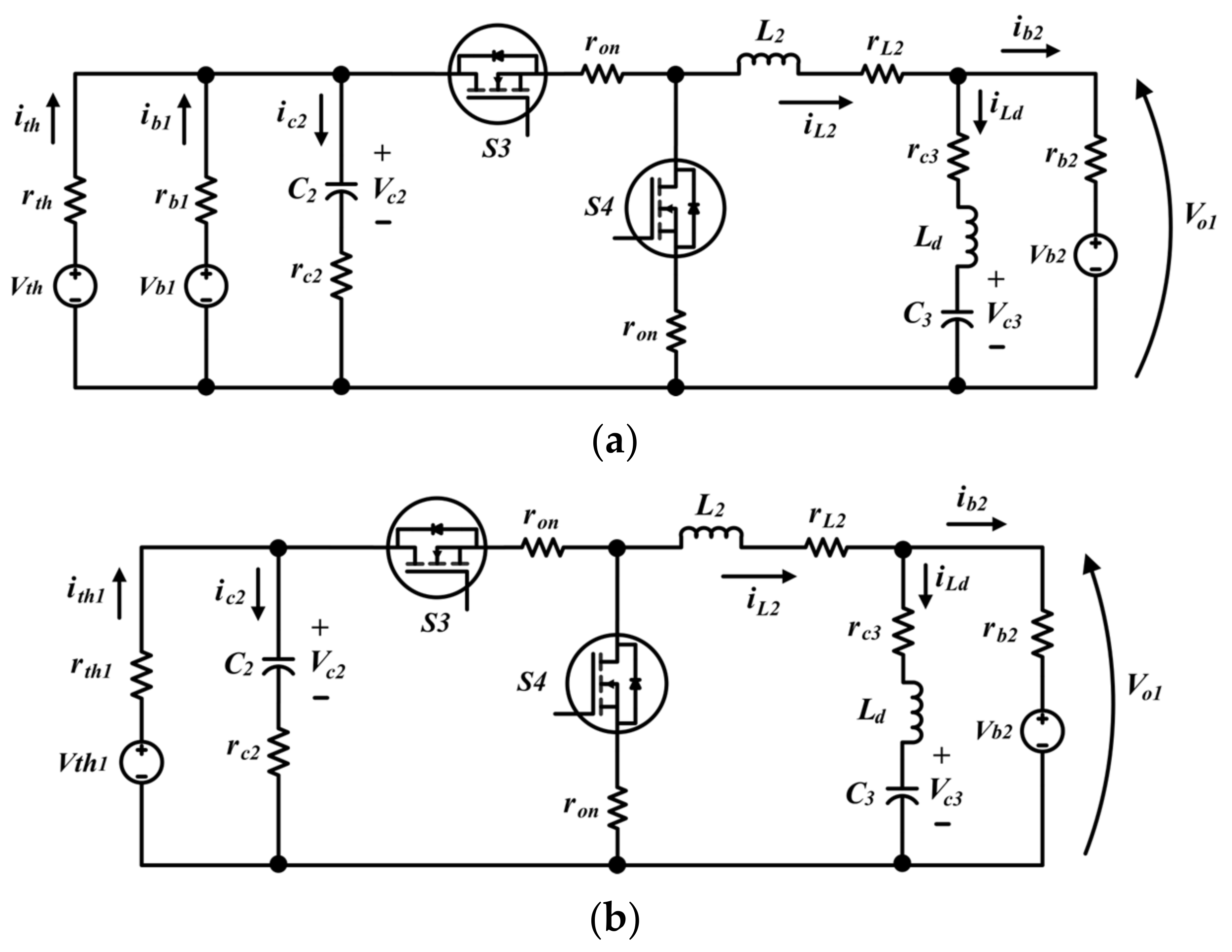
4.3. Control of Battery 2 Discharge
5. Numerical Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bhunia, M.; Gupta, R.; Subudhi, B. Cascaded DC-DC converter for a reliable standalone PV fed DC load. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), Kurukshetra, India, 8–10 December 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Mohapatra, D.; Padhee, S.; Jena, J. Design of Solar Powered Battery Charger: An Experimental Verification. In Proceedings of the 2018 IEEE International Students’ Conference on Electrical, Electronics and Computer Science (SCEECS), Bhopal, India, 24–25 February 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Mirzaei, A.; Forooghi, M.; Ghadimi, A.A.; Abolmasoumi, A.H.; Riahi, M.R. Design and construction of a charge controller for stand-alone PV/Battery hybrid system by using a new control strategy and power management. Sol. Energy 2017, 149, 132–144. [Google Scholar] [CrossRef]
- Shaw, P.; Sahu, P.K.; Maity, S.; Kumar, P. Modeling and control of a battery connected standalone photovoltaic system. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Samanta, S. DC Link Voltage Control based Power Management Scheme for Standalone PV Systems. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Chiang, S.J.; Shieh, H.; Chen, M. Modeling and Control of PV Charger System With SEPIC Converter. IEEE Trans. Ind. Electron. 2009, 56, 4344–4353. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Control strategy for a standalone PV/battery hybrid system. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 3412–3418. [Google Scholar] [CrossRef]
- Rahman, S.; Saha, S.; Islam, S.N.; Arif, M.T.; Mosadeghy, M.; Haque, M.E.; Oo, A.M. Analysis of Power Grid Voltage Stability with High Penetration of Solar PV Systems. IEEE Trans. Ind. Appl. 2021, 57, 2245–2257. [Google Scholar] [CrossRef]
- Garniwa, I.; Kuncoro, M.; Darussalam, R. Comparative Study for PV Power Stabilization Technology using Matlab Simulink. In Proceedings of the 2019 International Conference on Mechatronics, Robotics and Systems Engineering (MoRSE), Bali, Indonesia, 4–6 December 2019; pp. 112–117. [Google Scholar] [CrossRef]
- Zhao, J.; Iu, H.H.C.; Fernando, T.; An, L.; Lu, D.D.-C. Design of a non-isolated single-switch three-port DC-DC converter for standalone PV-battery power system. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 2493–2496. [Google Scholar] [CrossRef]
- Parsekar, S.; Chatterjee, K. A novel strategy for battery placement in standalone solar photovoltaic converter system. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014; pp. 2751–2756. [Google Scholar] [CrossRef]
- Gabbar, H.A.; Othman, A.M.; Abdussami, M.R. Review of Battery Management Systems (BMS) Development and Industrial Standards. Technologies 2021, 9, 28. [Google Scholar] [CrossRef]
- Okay, K.; Eray, S.; Eray, A. Development of Prototype Battery Management System for PV system. Renew. Energy 2022, 181, 1294–1304. [Google Scholar] [CrossRef]
- Spertino, F.; Ciocia, A.; Di Leo, P.; Malgaroli, G.; Russo, A. A smart battery management system for photovoltaic plants in households based on Raw Production Forecast. In Green Energy Advances; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef]
- Subashini, M.; Ramaswamy, M. A novel design of charge controller for a standalone solar photovoltaic system. In Proceedings of the 2016 3rd International Conference on Electrical Energy Systems (ICEES), Chennai, India, 17–19 March 2016; pp. 237–243. [Google Scholar] [CrossRef]
- Yang, Y.; Qin, Y.; Tan, S.-C.; Hui, S.Y.R. Efficient Improvement of Photovoltaic-Battery Systems in Standalone DC Microgrids Using a Local Hierarchical Control for the Battery System. IEEE Trans. Power Electron. 2019, 34, 10796–10807. [Google Scholar] [CrossRef]
- Deshmukh, S.; Thorat, A.R.; Korachagaon, I. Modelling and Analysis of PV Standalone System With Energy Management Scheme. In Proceedings of the 2020 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 2–4 July 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Xiao, W.; Ozog, N.; Dunford, W.G. Topology Study of Photovoltaic Interface for Maximum Power Point Tracking. IEEE Trans. Ind. Electron. 2007, 54, 1696–1704. [Google Scholar] [CrossRef]
- Stošović, M.A.; Dimitrijević, M.; Litovski, V. MPPT controller design for a standalone PV system. In Proceedings of the 2013 11th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 16–19 October 2013; pp. 501–504. [Google Scholar] [CrossRef]
- Chong, L.W.; Wong, Y.W.; Rajkumar, R.K.; Isa, D. Modelling and simulation of standalone PV systems with battery-supercapacitor Hybrid Energy Storage System for a rural household. Energy Procedia 2017, 107, 232–236. [Google Scholar] [CrossRef]
- Zakzouk, N.E.; Lotfi, R.A. Power Flow Control of a Hybrid Battery/Supercapacitor Standalone PV System under Irradiance and Load Variations. In Proceedings of the 2020 10th International Conference on Power and Energy Systems (ICPES), Chengdu, China, 25–27 December 2020; pp. 469–474. [Google Scholar] [CrossRef]
- Badpanda, S.; Dey, J.; Saha, T.K. Power Management and Control for PV-Battery-UC Standalone System. In Proceedings of the 2021 IEEE 4th International Conference on Computing, Power and Communication Technologies (GUCON), Kuala Lumpur, Malaysia, 24–26 September 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Xiao, W.; Elnosh, A.; Khadkikar, V.; Zeineldin, H. Overview of maximum power point tracking technologies for photovoltaic power systems. In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 3900–3905. [Google Scholar] [CrossRef]
- Harini, K.; Syama, S. Simulation and analysis of incremental conductance and Perturb and Observe MPPT with DC-DC converter topology for PV array. In Proceedings of the 2015 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 5–7 March 2015; pp. 1–5. [Google Scholar] [CrossRef]
- John, R.; Mohammed, S.S.; Zachariah, R. Variable step size Perturb and observe MPPT algorithm for standalone solar photovoltaic system. In Proceedings of the 2017 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), Krishnankoil, India, 23–25 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Mohapatra, A.; Nayak, B.; Saiprakash, C. Adaptive Perturb & Observe MPPT for PV System with Experimental Validation. In Proceedings of the 2019 IEEE International Conference on Sustainable Energy Technologies and Systems (ICSETS), Odisha, India, 26 February–1 March 2019; pp. 257–261. [Google Scholar] [CrossRef]
- Macaulay, J.; Zhou, Z. A Fuzzy Logical-Based Variable Step Size P&O MPPT Algorithm for Photovoltaic System. Energies 2018, 11, 1340. [Google Scholar] [CrossRef]
- Venkatramanan, D.; John, V. Dynamic Modeling and Analysis of Buck Converter based Solar PV Charge Controller for Improved MPPT Performance. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Chtita, S.; Derouich, A.; El Ghzizal, A.; Motahhir, S. An improved control strategy for charging solar batteries in off-grid photovoltaic systems. Sol. Energy 2021, 220, 927–941. [Google Scholar] [CrossRef]
- Badreldien, M.M.; Abuagreb, M.; Allehyani, M.F.; Johnson, B.K. Modeling and Control of Solar PV System Combined with Battery Energy Storage System. In Proceedings of the 2021 IEEE Electrical Power and Energy Conference (EPEC), Virtual Conference, 22–31 October 2021; pp. 373–377. [Google Scholar] [CrossRef]
- Tamrakar, V.; Gupta, S.C.; Sawle, Y. Study of characteristics of single and double diode electrical equivalent circuit models of solar PV module. In Proceedings of the 2015 International Conference on Energy Systems and Applications, Pune, India, 30 October–1 November 2015; pp. 312–317. [Google Scholar] [CrossRef]
- Tutkun, N.; Gegin, K.; Sarma, N.; Salam, Z. Comparison of Typical PV Module Performances Based on the Circuit Models. In Proceedings of the 2018 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Sabah, Malaysia, 7–10 October 2018; pp. 206–211. [Google Scholar] [CrossRef]
- Teyabeen, A.A.; Elhatmi, N.B.; Essnid, A.A.; Jwaid, A.E. Parameters Estimation of Solar PV Modules Based on Single-Diode Model. In Proceedings of the 2020 11th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 29–31 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Kar, S.; Banerjee, S.; Chanda, C.K. Stepwise Modelling and Analysis of A PV Module in Matlab Simulink. In Proceedings of the 2021 International Conference on Intelligent Technologies (CONIT), Hubli, India, 25–27 June 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Nezami, M.M.; Sarwar, M. Characteristic modeling analysis and simulation of solar PV module. In Proceedings of the 2015 Annual IEEE India Conference (INDICON), New Delhi, India, 17–20 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Ramos-Hernanz, J.; Lopez-Guede, J.M.; Zulueta, E.; Fernandez-Gamiz, U. Reverse saturation current analysis in photovoltaic cell models. WSEAS Trans. Power Syst. 2017, 12, 231–237. [Google Scholar]
- Sangsawang, V.; Chaitusaney, S. Modeling of photovoltaic module from commercial specification in datasheet. In Proceedings of the 2012 9th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Phetchaburi, Thailand, 16–18 May 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Liu, J.; Dong, Z.; Jin, T.; Liu, L. Recent Advance of Hybrid Energy Storage Systems for Electrified Vehicles. In Proceedings of the 2018 14th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Oulu, Finland, 2–4 July 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Roi, D.; Primon, A.; Rossella, M.; Ornato, M. 12V Battery modeling: Model development, simulation, and validation. In Proceedings of the 2017 International Conference of Electrical and Electronic Technologies for Automotive, Torino, Italy, 15–16 June 2017. [Google Scholar]
- Saldaña, G.; Martín, J.I.S.; Zamora, I.; Asensio, F.J.; Oñederra, O. Analysis of the Current Electric Battery Models for Electric Vehicle Simulation. Energies 2019, 12, 2750. [Google Scholar] [CrossRef]
- Hinz, H. Comparison of Lithium-Ion Battery Models for Simulating Storage Systems in Distributed Power Generation. Inventions 2019, 4, 41. [Google Scholar] [CrossRef]
- Chen, M.; Rincon-Mora, G.A. Accurate electrical battery model capable of predicting runtime and I-V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]
- Susanna, S.; Dewangga, B.R.; Wahyungoro, O.; Cahyadi, A.I. Comparison of Simple Battery Model and Thevenin Battery Model for SOC Estimation Based on OCV Method. In Proceedings of the 2019 International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, 24–25 July 2019; pp. 738–743. [Google Scholar] [CrossRef]
- Chang, W.-Y. The state of charge estimating methods for Battery: A review. ISRN Appl. Math. 2013, 2013, 953792. [Google Scholar] [CrossRef]
- Sridhar, H.; Meera, K.S. Study of grid connected solar photovoltaic system using real time digital simulator. In Proceedings of the 2014 International Conference on Advances in Electronics Computers and Communications, Bangalore, India, 10–11 October 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Callegaro, L.; Ciobotaru, M.; Fletcher, J.E.; Rios, P.A.; Pagano, D.J. Design of cascaded control loop for solar power optimizer based on a buck-boost converter. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- He, Q.; Zhao, Y. The design of controller of buck converter. In Proceedings of the 2010 International Conference on Computer Application and System Modeling (ICCASM 2010), Taiyuan, China, 22–24 October 2010; pp. 251–255. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Maximum power (Pmax) | 300 W |
| Voltage at maximum power (Vmp) | 36.6 V |
| Current at maximum power (Imp) | 8.12 A |
| Open circuit voltage (Voc) | 44.8 V |
| Short circuit current (Isc) | 8.69 A |
| Temperature coefficient of Voc (Kv) | −0.4239%/°C |
| Temperature coefficient of Isc (Ki) | 0.0906%/°C |
| Diode ideality factor (n) | 1.1 |
| Number of cells in series (Ns) | 72 |
| Shunt resistance (Rsh) | 738 Ω |
| Series resistance (Rs) | 0.284 Ω |
| Parameter | Value |
|---|---|
| Battery 1 nominal voltage (Vb1) | 24 V |
| Battery 2 nominal voltage (Vb2) | 12 V |
| Switching frequency (Fsw) | 100 kHz |
| Inductances (L1, L2, L3, Ld) | 460 µH, 400 µH, 200 µH, 8 µH |
| Inductor parasitic resistances (rL1, rL2, rL4) | 60 mΩ, 70 mΩ, 50 mΩ |
| Capacitances (C1, C2, C3, C4) | 100 µF, 150 µF, 400 µF, 200 µF, |
| Capacitor parasitic resistances (rc1, rc2, rc3, rc4) | 50 mΩ, 50 mΩ, 40 mΩ, 60 mΩ |
| Load resistance (RL) | 3 Ω |
| Kp | Ki | PM | BW | |
|---|---|---|---|---|
| MPPT voltage controller | −0.258 | −792 | 60° | 1.2 kHz |
| Load voltage controller | 15.54 | 3031.7 | 72° | 3 kHz |
| Battery 2 voltage charge controller | −1.918 | −6369 | 65° | 2.5 kHz |
| Battery 2 current charge controller | 0.249 | 566.9 | 50° | 800 Hz |
| Battery 2 current discharge controller | 0.51 | 250.6 | 55° | 600 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nkembi, A.A.; Santoro, D.; Cova, P.; Delmonte, N. A Novel Energy Management Control Scheme for a Standalone PV System in a DC Nanogrid. Electronics 2023, 12, 4725. https://doi.org/10.3390/electronics12234725
Nkembi AA, Santoro D, Cova P, Delmonte N. A Novel Energy Management Control Scheme for a Standalone PV System in a DC Nanogrid. Electronics. 2023; 12(23):4725. https://doi.org/10.3390/electronics12234725
Chicago/Turabian StyleNkembi, Armel Asongu, Danilo Santoro, Paolo Cova, and Nicola Delmonte. 2023. "A Novel Energy Management Control Scheme for a Standalone PV System in a DC Nanogrid" Electronics 12, no. 23: 4725. https://doi.org/10.3390/electronics12234725