
Autonomous Vehicles for Healthcare Applications: A Review on Mobile Robotic Systems and Drones in Hospital and Clinical Environments



Abstract
:1. Introduction
- a prospective review that resulted in the phase and component classification of papers and made it possible to observe how the literature changed over time, by process stage, and by intervention level;
- an analytical review that produced a mapping of documents by the implemented methods and involved components.
2. Materials and Methods
2.1. Article Selection Protocol
- Papers published in journals in the categories ‘Article’ or ‘Review’;
- The study involves the application of autonomous vehicles for healthcare purposes;
- The study addresses at least one of the following aspects of autonomous healthcare vehicles: vehicle development and/or design, software description, vehicle performance evaluation, or analysis of the regulations governing these devices;
- The autonomous vehicles are intended for transporting patients or goods;
- The document considers autonomous, semi-autonomous, and/or manual vehicles.
- The document type is neither ‘Article’ nor ‘Review’;
- The document language is different from English;
- The article was published before 2000.
2.2. Taxonomy
2.2.1. Prospective Review
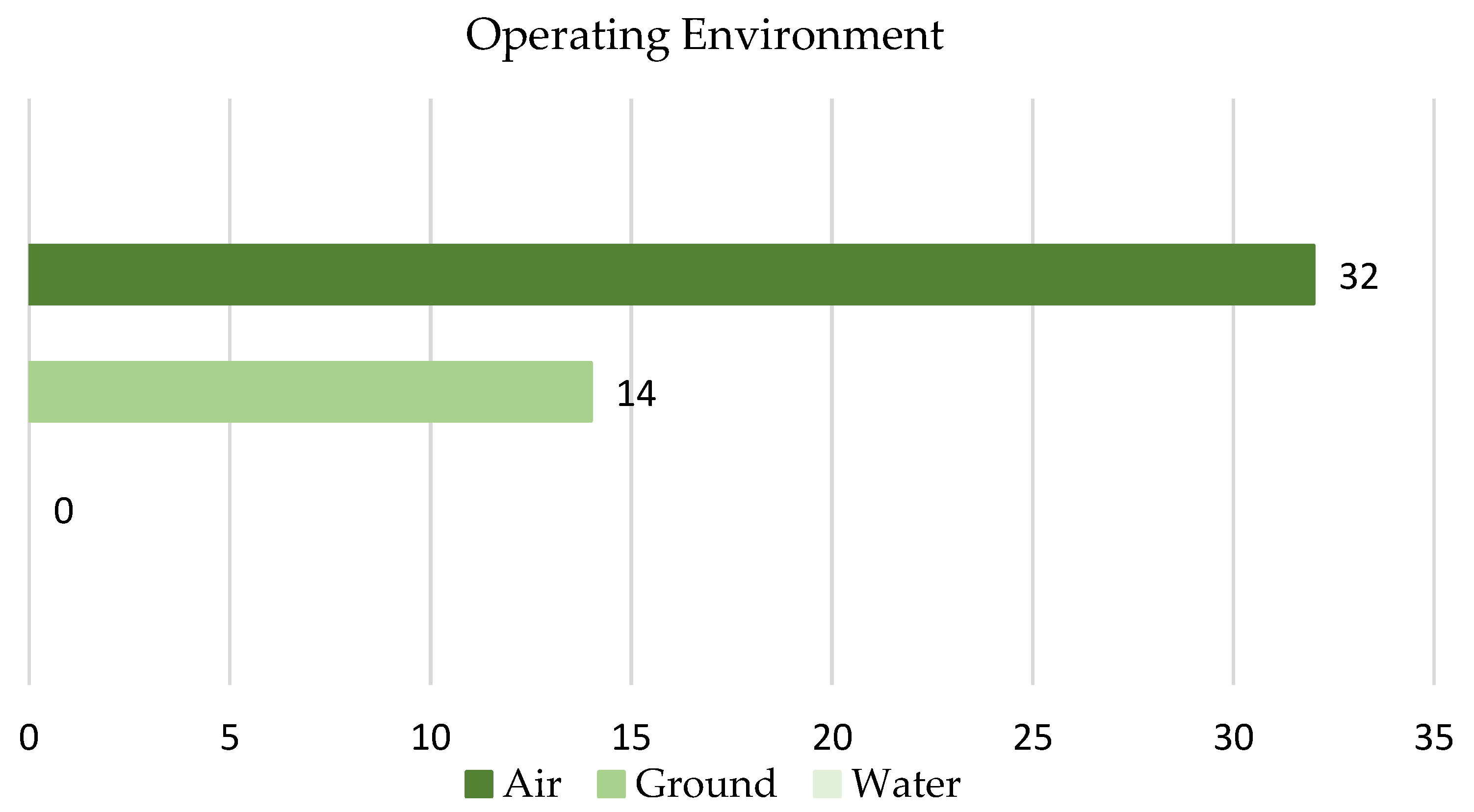
- The operating environment, meant as the settings in which the vehicle is able to work;
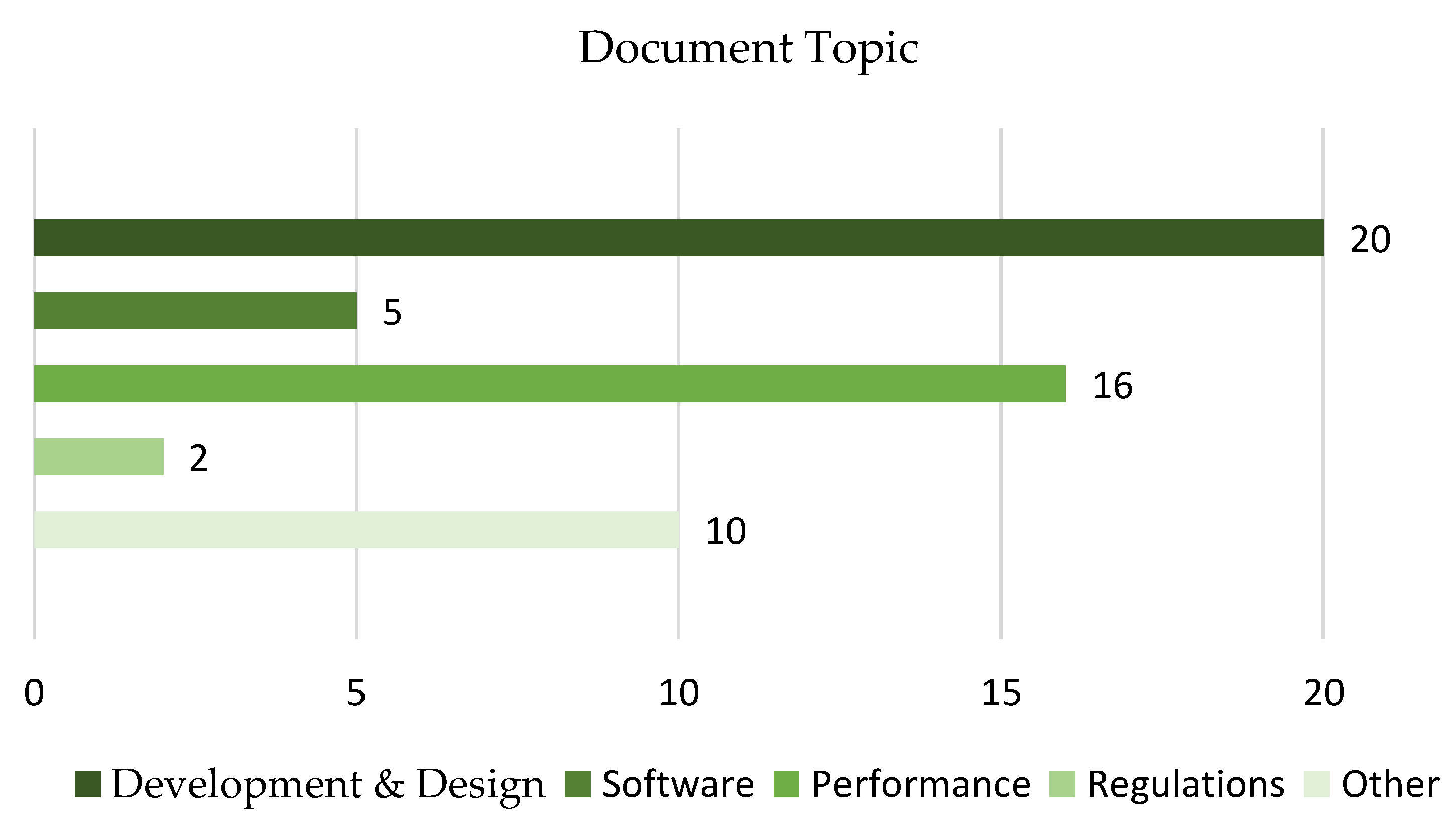
- The document topic, i.e., the main focus covered by the article;
- The vehicle autonomy, which is considered as the degree of autonomy that is enabled for the vehicle by provided control and actuation systems;
- The application sector, defined as the context in which the vehicle works.
- op1
- Air;
- op2
- Ground;
- op3
- Water.
- t1
- Development and Design: this category contains those papers whose focus is on the device design and development.
- t2
- Software: documents assigned to this category describe the development and implementation of the software for the correct operation of the described vehicle.
- t3
- Performance: this category includes papers mainly assigned to the description of the functions and features of the treated vehicle.
- t4
- Regulation: this category collects the documents that describe the regulatory aspects related to the use of the vehicle analyzed in the selected application areas.
- t5
- Other: documents designated to this category deal with vehicles used in hospital and clinical environments but present as the main focus a different topic.
- aut1
- Manual: this category contains those papers that describe vehicles without any automatic handling systems.
- aut2
- Semi-Autonomous: this section includes devices that are driven by humans but are equipped with an assisted movement system.
- aut3
- Autonomous: documents assigned to this category deal with vehicles capable of moving autonomously, without the need to be driven.
- as1
- Logistics Service: this category investigates the solutions implemented to improve the efficiency of the transportation of non-medical items in hospitals. These vehicles can also be used in the industrial sector.
- as2
- Medical: this category contains the solutions used in hospitals and clinics to handle and manage medical goods, such as medicines, defibrillators, and others.
- as3
- Other: documents assigned to this category discuss the use of autonomous vehicles for purposes unrelated to healthcare.
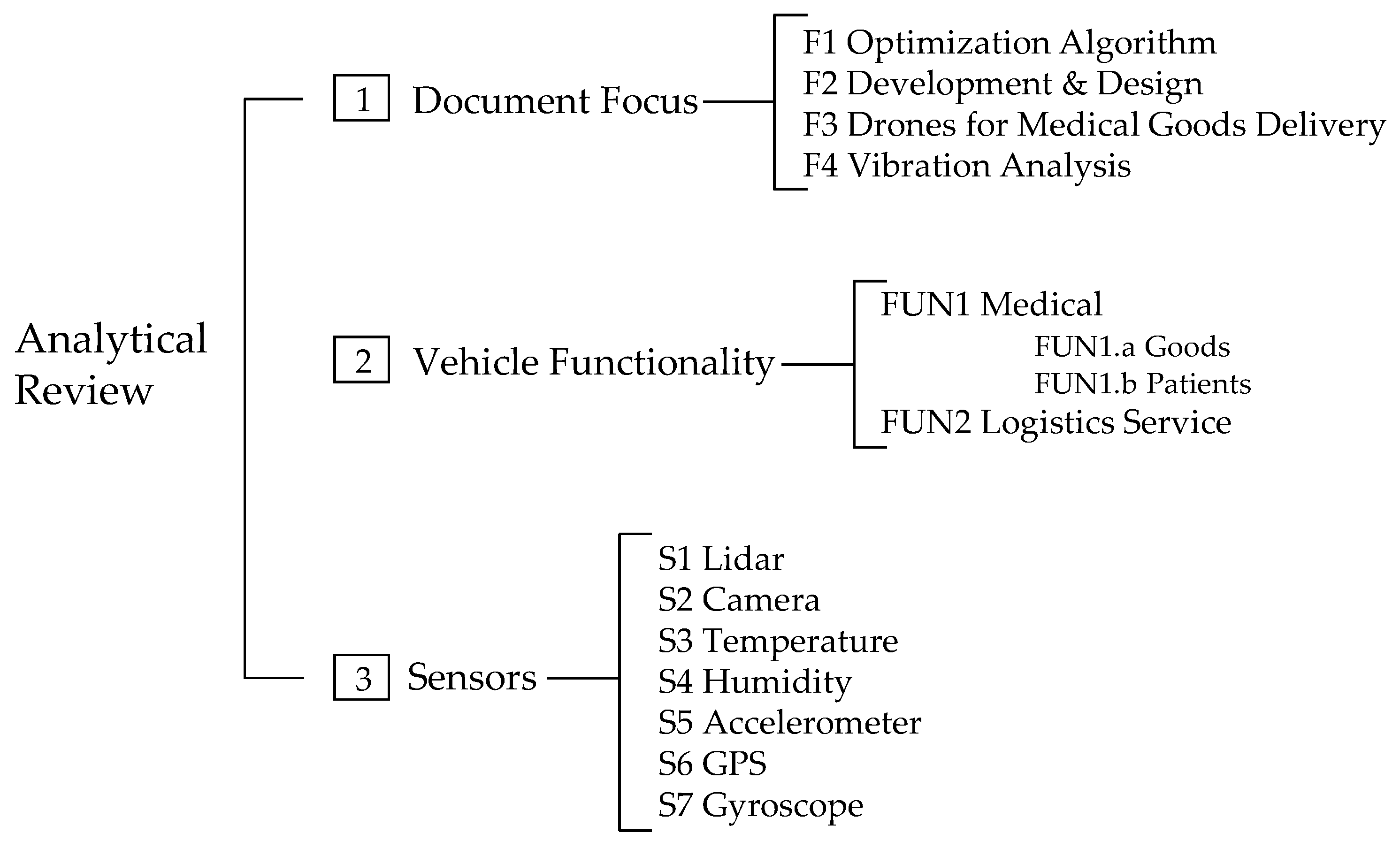
2.2.2. Analytical Review
- F1
- Optimization Algorithms;
- F2
- Development and Design;
- F3
- Vibration Analysis;
- F4
- Drones for Defibrillator Transportation.
- FUN1
- Medical: the articles in this category describe any activity intended to improve patient health, including delivery and distribution of drugs or the transportation of the patients themselves. This category includes the subclasses:
- FUN1.a
- Goods: this section includes papers describing the use of vehicles for transporting medical supplies, such as drugs, medical equipment, defibrillators, and blood bags.
- FUN1.b
- Patients: vehicles in this category are dedicated to the transport of subjects for healthcare-related activities.
- FUN2
- Logistics Service: this category contains articles dealing with systems for the organization of ancillary activities that are indispensable in a hospital facility.
- S1
- LIDAR (light detection and ranging);
- S2
- Camera;
- S3
- Temperature;
- S4
- Humidity;
- S5
- Accelerometer;
- S6
- GPS (global positioning system);
- S7
- Gyroscope.
2.3. Data Analysis
3. Prospective Review
4. Analytical Review
4.1. Document Focus
- Optimization Algorithms;
- Development and Design;
- Vibration Analysis;
- Drones for Transport of Defibrillators.
4.1.1. Optimization Algorithms
- Flight trajectory optimization;
- Hub selection-routing algorithm.
- Vertical Take-Off and Landing (VTOL) of drones;
- UAVs powered by electric batteries: this assumption allows consideration of 95% of the drones on the market;
- Flight at an altitude between 50 and 70 m: this allows for obstacle-free flight and compliance with the majority of national flight laws, which set a maximum altitude for low-weight drones between 100 and 150 m (in EU countries) [34];
- Uniform transport goods in terms of dimensions and weight;
- UAVs in Beyond Visual Line of Sight (BVLOS) mode;
- Hubs with unlimited capacity, which is a coherent hypothesis given the small size of the package a drone can transport.
- Locked and electronically controlled vehicles;
- A track network realized through horizontal, vertical, and curved rails.
4.1.2. Development and Design
- Mechanical container, made of polyurethane;
- Electronics;
- Software platform, consisting of backend software, an app, and electronic firmware.
4.1.3. Drones for Medical Goods Delivery
4.1.4. Vibration Analysis
- Decreased quality of the transported load;
- Decreased equipment reliability;
- Decreased fatigue life;
- Inaccurate information from measuring instruments.
- No payload, to set a zero-point of comparison;
- Fixed payload, directly attached to the quadcopter body;
- Swing payload, free to move in all directions;
- Fixed payload with additional mass of 150 g.
4.2. Vehicle Functionality
4.2.1. Medical
4.2.2. Logistics Service
4.3. Sensors
4.3.1. LIDAR
4.3.2. Camera
4.3.3. Temperature
4.3.4. Humidity
4.3.5. Accelerometer and Gyroscope
4.3.6. GPS
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AED | Automated External Defibrillator |
| AGV | Automated Guided Vehicle |
| AI | Artificial Intelligence |
| AMD | Automated Medicine Delivery |
| BVLOS | Beyond Visual Line Of Sight |
| CNN | Convolutional Neural Network |
| DT | Digital Twin |
| EMS | Emergency Medical Service |
| EU | European Union |
| FDA | Food and Drug Administration |
| FR | First Responder |
| GDP | Good Distribution Practice |
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| ICU | Intensive Care Unit |
| LIDAR | LIght Detection And Ranging |
| LNS | Large Neighborhood Search |
| MDPI | Multidisciplinary Digital Publishing Institute |
| OCP | Optimum Control Problem |
| OHCA | Out-of-Hospital Cardiac Arrest |
| PAD | Public Access Defibrillation |
| SLAM | Simultaneous Localization And Mapping |
| SOC | State-Of-Charge |
| TRL | Technology Readiness Level |
| UAV | Unmanned Aerial Vehicle |
| USA | United States of America |
| VF | Ventricular Fibrillation |
| VTOL | Vertical Take-Off and Landing |
Appendix A. Classification Tables

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference ID | Document Type | Operating Environment op | Document Topic t | Vehicle Autonomy aut | Application Sector as | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 1 | 2 | 3 | ||
| Søraa_2021 [4] | A | √ | √ | √ | √ | ||||||||||
| He_2021 [21] | A | √ | √ | √ | √ | ||||||||||
| Otero_2020 [33] | A | √ | √ | √ | √ | ||||||||||
| Bacik_2017 [5] | A | √ | √ | √ | √ | √ | |||||||||
| Ren_2023 [14] | A | √ | √ | √ | √ | ||||||||||
| Geronel_2022 [6] | A | √ | √ | √ | √ | √ | |||||||||
| Prasad_2019 [3] | A | √ | √ | √ | √ | √ | |||||||||
| Escribano_2020 [7] | A | √ | √ | √ | √ | √ | |||||||||
| Park_2023 [15] | A | √ | √ | √ | √ | ||||||||||
| Goetzendorf_2021 [54] | A | √ | √ | √ | √ | ||||||||||
| Bloss_2014 [2] | R | √ | √ | √ | √ | √ | √ | √ | |||||||
| Yakymets_2022 [55] | A | √ | √ | √ | √ | √ | √ | ||||||||
| Lv_2022 [35] | A | √ | √ | √ | √ | √ | √ | ||||||||
| Fernàndez_2020 [13] | A | √ | √ | √ | √ | ||||||||||
| Saltzherr_2008 [20] | A | √ | √ | √ | √ | ||||||||||
| Rajeswaran_2012 [56] | A | √ | √ | √ | √ | ||||||||||
| Tow_2015 [16] | A | √ | √ | √ | √ | ||||||||||
| Tsima_2019 [18] | A | √ | √ | √ | √ | ||||||||||
| Yin_2016 [19] | A | √ | √ | √ | √ | ||||||||||
| Saad_2019 [23] | A | √ | √ | √ | √ | ||||||||||
| Ajzenberg_2018 [17] | A | √ | √ | √ | √ | ||||||||||
| De Silvestri_2022 [40] | A | √ | √ | √ | |||||||||||
| Liu_2023 [9] | R | √ | √ | √ | √ | √ | |||||||||
| Choi_2021 [44] | A | √ | √ | √ | √ | √ | |||||||||
| Schierbeck_2022 [31] | A | √ | √ | √ | √ | √ | |||||||||
| Claesson_2017 [26] | A | √ | √ | √ | √ | ||||||||||
| Rees_2021 [11] | A | √ | √ | √ | √ | √ | √ | ||||||||
| Poljak_2020 [57] | R | √ | √ | √ | √ | √ | √ | ||||||||
| Ll_2021 [58] | A | √ | √ | √ | √ | ||||||||||
| Mohd_2021- [59] | A | √ | √ | √ | √ | √ | √ | ||||||||
| Damoah_2021 [30] | A | √ | √ | √ | √ | ||||||||||
| Shi_2022 [60] | A | √ | √ | √ | √ | √ | |||||||||
| Sham_2022 [28] | A | √ | √ | √ | √ | ||||||||||
| Rahul_2019 [43] | A | √ | √ | √ | √ | ||||||||||
| Nedelea_2022 [42] | A | √ | √ | √ | √ | √ | |||||||||
| Josephin_2018 [49] | A | √ | √ | √ | √ | ||||||||||
| Baloola_2022 [29] | A | √ | √ | √ | √ | ||||||||||
| Nimilan_2019 [41] | A | √ | √ | √ | √ | √ | |||||||||
| Nenni_2020 [12] | A | √ | √ | √ | √ | √ | |||||||||
| Obulesu_2019 [51] | A | √ | √ | √ | √ | ||||||||||
| Hogan_2022 [10] | A | √ | √ | √ | √ | ||||||||||
| Ackerman_2019 [32] | A | √ | √ | √ | √ | ||||||||||
| Purahong_2022 [27] | A | √ | √ | √ | √ | √ | |||||||||
| Amicone_2021 [8] | A | √ | √ | √ | √ | ||||||||||
| Chen_2021 [22] | A | √ | √ | √ | √ | √ | |||||||||
References
- Khalid, M.; Awais, M.; Singh, N.; Khan, S.; Raza, M.; Malik, Q.B.; Imran, M. Autonomous Transportation in Emergency Healthcare Services: Framework, Challenges, and Future Work. IEEE Internet Things Mag. 2021, 4, 28–33. [Google Scholar] [CrossRef]
- Bloss, R. Unmanned vehicles while becoming smaller and smarter are addressing new applications in medical, agriculture, in addition to military and security. Ind. Robot. Int. J. 2014, 41, 82–86. [Google Scholar] [CrossRef]
- Prasad, G.; Abishek, P.; Karthick, R. Influence of unmanned aerial vehicle in medical product transport. Int. J. Intell. Unmanned Syst. 2019, 7, 88–94. [Google Scholar] [CrossRef]
- Søraa, R.A.; Fostervold, M.E. Social domestication of service robots: The secret lives of Automated Guided Vehicles (AGVs) at a Norwegian hospital. Int. J. Hum. Comput. Stud. 2021, 152, 102627. [Google Scholar] [CrossRef]
- Bacik, J.; Durovsky, F.; Biros, M.; Kyslan, K.; Perdukova, D.; Padmanaban, S. Pathfinder-Development of Automated Guided Vehicle for Hospital Logistics. IEEE Access 2017, 5, 26892–26900. [Google Scholar] [CrossRef]
- Geronel, R.S.; Begnini, G.R.; Botez, R.M.; Bueno, D.D. An overview on the use of unmanned aerial vehicles for medical product transportation: Flight dynamics and vibration issues. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 349. [Google Scholar] [CrossRef]
- Macias, J.E.; Angeloudis, P.; Ochieng, W. Optimal hub selection for rapid medical deliveries using unmanned aerial vehicles. Transp. Res. Part C Emerg. Technol. 2020, 110, 56–80. [Google Scholar] [CrossRef]
- Amicone, D.; Cannas, A.; Marci, A.; Tortora, G. A smart capsule equipped with artificial intelligence for autonomous delivery of medical material through drones. Appl. Sci. 2021, 11, 7976. [Google Scholar] [CrossRef]
- Liu, X.; Yuan, Q.; Wang, G.; Bian, Y.; Xu, F.; Chen, Y. Drones delivering automated external defibrillators: A new strategy to improve the prognosis of out-of-hospital cardiac arrest. Resuscitation 2023, 182, 109669. [Google Scholar] [CrossRef]
- Hogan, W.; Harris, M.; Brock, A.; Rodwell, J. What Is Holding Back The Use of Drones for Medication Delivery in Rural Australia? Sustainability 2022, 14, 15778. [Google Scholar] [CrossRef]
- Rees, N.; Howitt, J.; Breyley, N.; Geoghegan, P.; Powel, C. A simulation study of drone delivery of Automated External Defibrillator (AED) in out of Hospital Cardiac Arrest (OHCA) in the UK. PLoS ONE 2021, 16, e0259555. [Google Scholar] [CrossRef] [PubMed]
- Nenni, M.E.; Pasquale, V.D.; Miranda, S.; Riemma, S. Development of a Drone-Supported Emergency Medical Service. Int. J. Technol. 2020, 11, 656–666. [Google Scholar] [CrossRef]
- Achával, M.I.F.; Mammi, L.F.; FortiniCabarcos, N.; Guiñazú, G.G.; Robledo, C.A.M.; Dvorkin, J.; Monteverde, E.; Pascual, C.; Costa, C.E.; Vainstein, E.O. Assessment of emergency trolley drugs in a children’s hospital. Before and after study on an educational intervention. Arch. Argent. Pediatr. 2020, 118, 234–239. [Google Scholar] [CrossRef]
- Ren, P. Local Path Planning Method for Unmanned Vehicle Based on Model Predictive Control in Hospital Environment. J. Test. Eval. 2023, 51, 20210441. [Google Scholar] [CrossRef]
- Park, Y.; Lee, S.; Sung, I.; Nielsen, P.; Moon, I. Facility Location-Allocation Problem for Emergency Medical Service with Unmanned Aerial Vehicle. IEEE Trans. Intell. Transp. Syst. 2023, 24, 1465–1479. [Google Scholar] [CrossRef]
- Tow, C.Y.; Kuen, K.W. Force Evaluation and Comparison for Supply Trolley in a Hospital. Procedia Manuf. 2015, 3, 1861–1864. [Google Scholar] [CrossRef]
- Ajzenberg, H.; Newman, P.; Harris, G.A.; Cranston, M.; Boyd, J.G. A “Neurological Emergency Trolley” reduces turnaround time for high-risk medications in a general intensive care unit. Intensive Crit. Care Nurs. 2018, 44, 40–44. [Google Scholar] [CrossRef]
- Tsima, B.M.; Rajeswaran, L.; Cox, M. Assessment of cardiopulmonary resuscitation equipment in resuscitation trolleys in district hospitals in Botswana: A cross-sectional study. Afr. J. Prim. Health Care Fam. Med. 2019, 11, a2029. [Google Scholar] [CrossRef]
- Yin, S.; Jun, J.; Siew, H.; Bee, S.; Ng, I.; Putra, A.S.; Ang, A. Functional redesign of the Hospital trolley-Bed tray table. Ergon. Des. 2016, 24, 20–26. [Google Scholar] [CrossRef]
- Saltzherr, T.P.; Luitse, J.S.; Hoogerwerf, N.; Vernooij, A.S.; Goslings, J.C. Facilitating in-hospital transport of trauma patients: Design of a trauma life support trolley. Injury 2008, 39, 809–812. [Google Scholar] [CrossRef]
- He, X.; Quan, H.; Lin, W.; Deng, W.; Tan, Z. AGV Scheduling Optimization for Medical Waste Sorting System. Sci. Program. 2021, 2021. [Google Scholar] [CrossRef]
- Chen, W.A.; Koster, R.B.D.; Gong, Y. Performance evaluation of automated medicine delivery systems. Transp. Res. Part E Logist. Transp. Rev. 2021, 147, 102242. [Google Scholar] [CrossRef]
- Saad, N.M.; Abdullah, A.R.; Noor, N.S.; Hamid, N.A.; Syahmi, M.A.M.; Ali, N.M. Automated medical surgical trolley. Int. J. Electr. Comput. Eng. 2019, 9, 1822–1831. [Google Scholar] [CrossRef]
- Tuğrul, K.M. Drone Technologies and Applications; IntechOpen: London, UK, 2023. [Google Scholar]
- European Commission. A Drone Strategy 2.0 for a Smart and Sustainable Unmanned Aircraft Eco-System in Europe; European Commission: Brussels, Belgium, 2022. [Google Scholar]
- Claesson, A.; Svensson, L.; Nordberg, P.; Ringh, M.; Rosenqvist, M.; Djarv, T.; Samuelsson, J.; Hernborg, O.; Dahlbom, P.; Jansson, A.; et al. Drones may be used to save lives in out of hospital cardiac arrest due to drowning. Resuscitation 2017, 114, 152–156. [Google Scholar] [CrossRef]
- Purahong, B.; Anuwongpinit, T.; Juhong, A.; Kanjanasurat, I.; Pintaviooj, C. Medical Drone Managing System for Automated External Defibrillator Delivery Service. Drones 2022, 6, 93. [Google Scholar] [CrossRef]
- Sham, R.; Siau, C.S.; Tan, S.; Kiu, D.C.; Sabhi, H.; Thew, H.Z.; Selvachandran, G.; Quek, S.G.; Ahmad, N.; Ramli, M.H.M. Drone Usage for Medicine and Vaccine Delivery during the COVID-19 Pandemic: Attitude of Health Care Workers in Rural Medical Centres. Drones 2022, 6, 109. [Google Scholar] [CrossRef]
- Baloola, M.O.; Ibrahim, F.; Mohktar, M.S. Optimization of Medication Delivery Drone with IoT-Guidance Landing System Based on Direction and Intensity of Light. Sensors 2022, 22, 4272. [Google Scholar] [CrossRef]
- Damoah, I.S.; Ayakwah, A.; Tingbani, I. Artificial intelligence (AI)-enhanced medical drones in the healthcare supply chain (HSC) for sustainability development: A case study. J. Clean. Prod. 2021, 328, 129598. [Google Scholar] [CrossRef]
- Schierbeck, S.; Hollenberg, J.; Nord, A.; Svensson, L.; Nordberg, P.; Ringh, M.; Forsberg, S.; Lundgren, P.; Axelsson, C.; Claesson, A. Automated external defibrillators delivered by drones to patients with suspected out-of-hospital cardiac arrest. Eur. Heart J. 2022, 43, 1478–1487. [Google Scholar] [CrossRef]
- Ackerman, E.; Koziol, M. The Blood R Zipline’s medical delivery drones are changing the game in Rwanda. IEEE Spectr. 2019, 56, 24–31. [Google Scholar] [CrossRef]
- Arenzana, A.O.; Macias, J.J.E.; Angeloudis, P. Design of Hospital Delivery Networks Using Unmanned Aerial Vehicles. Transp. Res. Rec. 2020, 2674, 405–418. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote. Sens. 2017, 9, 924. [Google Scholar] [CrossRef]
- Lv, Z.; Chen, D.; Feng, H.; Zhu, H.; Lv, H. Digital Twins in Unmanned Aerial Vehicles for Rapid Medical Resource Delivery in Epidemics. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25106–25114. [Google Scholar] [CrossRef] [PubMed]
- Deren, L.; Wenbo, Y.; Zhenfeng, S. Smart city based on digital twins. Comput. Urban Sci. 2021, 1, 4. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Lee, B.; Guizani, M.; Kumar, N.; Qiao, Y.; Liu, X. Blockchain for decentralized multi-drone to combat COVID-19 and future pandemics: Framework and proposed solutions. Trans. Emerg. Telecommun. Technol. 2021, 32, e4255. [Google Scholar] [CrossRef]
- Gupta, M.; Abdelsalam, M.; Mittal, S. Enabling and Enforcing Social Distancing Measures using Smart City and ITS Infrastructures: A COVID-19 Use Case. arXiv 2020, arXiv:2004.09246. [Google Scholar]
- Hussain, Z. Paradigm of technological convergence and digital transformation: The challenges of CH sectors in the global COVID-19 pandemic and commencing resilience-based structure for the post-COVID-19 era. Digit. Appl. Archaeol. Cult. Herit. 2021, 21, e00182. [Google Scholar] [CrossRef]
- Silvestri, S.D.; Pagliarani, M.; Tomasello, F.; Trojaniello, D.; Sanna, A. Design of a Service for Hospital Internal Transport of Urgent Pharmaceuticals via Drones. Drones 2022, 6, 70. [Google Scholar] [CrossRef]
- Nimilan, V.; Manohar, G.; Sudha, R.; Stanley, P. Drone-aid: An aerial medical assistance. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 1288–1292. [Google Scholar] [CrossRef]
- Nedelea, P.L.; Popa, T.O.; Manolescu, E.; Bouros, C.; Grigorasi, G.; Andritoi, D.; Pascale, C.; Andrei, A.; Cimpoesu, D.C. Telemedicine System Applicability Using Drones in Pandemic Emergency Medical Situations. Electronics 2022, 11, 2160. [Google Scholar] [CrossRef]
- Rahul, S.R.; Arun, V.; Prasad, S.V. Design and implementation of GPS based medical services using drone. Int. J. Eng. Adv. Technol. 2019, 8, 1683–1686. [Google Scholar] [CrossRef]
- Choi, D.S.; Hong, K.J.; Shin, S.D.; Lee, C.G.; Kim, T.H.; Cho, Y.; Song, K.J.; Ro, Y.S.; Park, J.H.; Kim, K.H. Effect of topography and weather on delivery of automatic electrical defibrillator by drone for out-of-hospital cardiac arrest. Sci. Rep. 2021, 11, 24195. [Google Scholar] [CrossRef] [PubMed]
- Valenzuela, T.D.; Roe, D.J.; Nichol, G.; Clark, L.L.; Spaite, D.W.; Hardman, R.G. Outcomes of Rapid Defibrillation by Security Officers after Cardiac Arrest in Casinos. N. Engl. J. Med. 2000, 343, 1206–1209. [Google Scholar] [CrossRef] [PubMed]
- Claesson, A.; Herlitz, J.; Svensson, L.; Ottosson, L.; Bergfeldt, L.; Engdahl, J.; Ericson, C.; Sandén, P.; Axelsson, C.; Bremer, A. Defibrillation before EMS arrival in western Sweden. Am. J. Emerg. Med. 2017, 35, 1043–1048. [Google Scholar] [CrossRef] [PubMed]
- Comtet, H.E.; Johannessen, K.A. The moderating role of pro-innovative leadership and gender as an enabler for future drone transports in healthcare systems. Int. J. Environ. Res. Public Health 2021, 18, 2637. [Google Scholar] [CrossRef] [PubMed]
- Arcara, P.; Bittanti, S.; Lovera, M. Periodic control of helicopter rotors for attenuation of vibrations in forward flight. IEEE Trans. Control Syst. Technol. 2000, 8, 883–894. [Google Scholar] [CrossRef]
- Dhivya, A.J.A.; Hemalatha, R.J.; Thamizhvani, R.T.; Joseph, J.E.; Babu, B.; Chandrasekaran, R. Medical Drone—A Life Saver in Emergency Situations. Int. J. Eng. Technol. 2018, 7, 14. [Google Scholar] [CrossRef]
- Reutebuch, S.; Andersen, H.E.; Mcgaughey, R. Light Detection and Ranging (LIDAR): An Emerging Tool for Multiple Resource Inventory. J. For. 2005, 103, 286–292. [Google Scholar]
- Obulesu, D.; Arunkumar, G.; Mishra, B.P.; Spoorthi, J.; Manjunath, T.C. Recent advances in the design and development of a drone used for bio-medical engineering applications: Medi-sky. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 796–800. [Google Scholar] [CrossRef]
- Spilker, J.J.J.; Penina, A.; Bradford, W.P.; Per, E. Global Positioning System: Theory and Applications, Volume I; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1996. [Google Scholar] [CrossRef]
- Kakaes, K.; Greenwood, F.; Lippincott, M.; Dosemagen, S.; Meier, P.; Wich, S. Drones and Aerial Observation: New Technologies for Property Rights, Human Rights, and Global Development; New America: Washington, DC, USA, 2015. [Google Scholar]
- Goetzendorf-Grabowski, T.; Tarnowski, A.; Figat, M.; Mieloszyk, J.; Hernik, B. Lightweight unmanned aerial vehicle for emergency medical service—Synthesis of the layout. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 235, 5–21. [Google Scholar] [CrossRef]
- Yakymets, V.M.; Pechiborshch, V.P.; Yakymets, V.V.; Volianskyi, P.B.; Yadchenko, D.M.; Buyun, L.I.; Ohorodniychuk, I.V. Prospects for Using Unmanned Aerial Vehicles for Medical and Biological Protection of the Civilians and the Military in the Safe Zone and the Joint Forces Operation (JFO) Area. Sci. Innov. 2022, 18, 49–60. [Google Scholar] [CrossRef]
- Rajeswaran, L.; Ehlers, V.J. Audits of emergency trolleys’ contents in selected hospitals in Botswana. Health SA Gesondheid 2012, 17, a621. [Google Scholar] [CrossRef]
- Poljak, M.; Šterbenc, A. Use of drones in clinical microbiology and infectious diseases: Current status, challenges and barriers. Clin. Microbiol. Infect. 2020, 26, 425–430. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Goh, W.; Jhanjhi, N. A design of IoT-based medicine case for the multi-user medication management using drone in elderly centre. J. Eng. Sci. Technol. 2021, 16, 1145–1166. [Google Scholar]
- Mohd, S.A.; Gan, K.B.; Ariffin, A.K. Development of Medical Drone for Blood Product Delivery: A Technical Assessment. Int. J. Online Biomed. Eng. 2021, 17, 183–196. [Google Scholar] [CrossRef]
- Shi, Y.; Lin, Y.; Li, B.; Li, R.Y.M. A bi-objective optimization model for the medical supplies’ simultaneous pickup and delivery with drones. Comput. Ind. Eng. 2022, 171, 108389. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marmaglio, P.; Consolati, D.; Amici, C.; Tiboni, M. Autonomous Vehicles for Healthcare Applications: A Review on Mobile Robotic Systems and Drones in Hospital and Clinical Environments. Electronics 2023, 12, 4791. https://doi.org/10.3390/electronics12234791
Marmaglio P, Consolati D, Amici C, Tiboni M. Autonomous Vehicles for Healthcare Applications: A Review on Mobile Robotic Systems and Drones in Hospital and Clinical Environments. Electronics. 2023; 12(23):4791. https://doi.org/10.3390/electronics12234791
Chicago/Turabian StyleMarmaglio, Paolo, Davide Consolati, Cinzia Amici, and Monica Tiboni. 2023. "Autonomous Vehicles for Healthcare Applications: A Review on Mobile Robotic Systems and Drones in Hospital and Clinical Environments" Electronics 12, no. 23: 4791. https://doi.org/10.3390/electronics12234791