1. Introduction
With the development of science and technology, the way of human communication has evolved from wired to wireless, which has also prompted many applications of wireless communication. Wireless Sensor Networks (WSNs) are one of the most important in wireless communication applications. WSNs are composed of multiple sensor nodes, which collect different environmental information such as temperature, sound, or pressure data and then process the data according to a variety of applications. WSNs are applied in many fields such as military monitoring, environmental detection, smart homes, and target localization and tracking [
1,
2]. The wireless ad hoc network composes multiple mobile hosts, such as notebook computers or smartphones. Each mobile host is equipped with a wireless network card so that each device can communicate with the other. An ad hoc network is characterized in that there is no base station in the network, and the transmission work is connected peer-to-peer between networks. Its advantage is that the network can be quickly formed, and it has considerable convenience and adaptability. Compared with the wireless networks of the general base station structure, such as GSM, GPRS, or 4G and other systems, the deployment cost of the wireless ad hoc network is greatly reduced. A wireless ad hoc network is the predecessor of the wireless sensor network; both are infrastructure-less network forms. They have much in common in terms of concept, but the construction conditions of wireless sensor networks are more stringent. The wireless sensor network originated from the Smart Dust project at the University of California, Berkeley. Its purpose was to develop a set of tiny sensor nodes for the U.S. Department of Defense and apply it to military-related intelligence collection. Under the wireless network architecture, the design of the sensor is to save power and be small as the primary goal. Sensors must not only have sensing capabilities, but also have communication capabilities. Each sensor is like a tiny computer. Since then, the University of California, Los Angeles, and the Massachusetts Institute of Technology have successively developed different sensors to expand the application of wireless sensor network.
This paper focuses on the application of wireless sensor networks in target localization and tracking. Generally speaking, the positioning methods of wireless sensor networks can be divided into range-based and range-free [
1,
2]. The former is most representative of a Global Positioning System (GPS). The advantage of GPS is that it has high positioning accuracy, but its disadvantages are that the construction cost is high and it is easily affected by factors such as weather effects or building shelters, which will affect the range of use and positioning quality. The former is most represented by the GPS. In practical applications, to meet the needs of dynamic events, the sensor needs to have the ability to move [
3,
4]. Therefore, this study will explore how to use the characteristics of information sharing and the movement of elements or particles (sensors) in artificial intelligence algorithms, combined with the received signal strength index (RSSI) channel model to improve the performance of target positioning and tracking in wireless sensor networks.
In the target localization and tracking system, each sensor needs to know its position, and the fastest way is to use GPS for target localization and tracking. However, it is very expensive to install a GPS positioning system on large-scale sensing equipment, so many target localization and tracking methods of wireless sensor networks have been proposed, such as Received Signal Strength (RSS), Time of Arrival (TOA), Time Difference of Arrival (TDOA), Angle of Arrival (AOA), etc. [
5,
6,
7,
8]. The sensors communicate with each other to receive signals to the target point to estimate the target position. However, in these methods, the equipment required by TOA, TDOA, and AOA is more expensive than RSS, and the computational complexity is higher. Therefore, this paper uses RSS to estimate the distance between the target point and the algorithm (sensor). However, the shortcoming of RSS is that it is easily affected by the change in environment, which will cause the estimation error of the target position to be too large. Therefore, reducing the positioning error caused by the fluctuation of RSS is one of the issues to be discussed in this study.
A variety of indoor localization technologies have been proposed in the literature. Localization techniques on signal processing methodology, such as proximity sensing, lateration, angulation, dead reckoning, fingerprinting, and hybrid approaches have been used to navigate the objects in either indoor or outdoor environments. A variety of artificial intelligent methods, e.g., machine learning, neural networks, deep learning, Bayesian networks, fuzzy systems, particle swarm optimization, unsupervised learning techniques, etc., have been proposed for improving the accuracy of localization [
9,
10]. The genetic algorithm has also been applied for localization [
11,
12,
13]. Some physical layer localization technologies have been adopted for object tracking in indoor environments; for example, WiFi, RFID, Bluetooth, UWB, Ultrasound, Visible Light, FM radio, Zigbee, LoRa, mobile networks, and Hybrid [
14,
15]. The 3D Bayesian graphical model has been used for indoor localization systems [
16,
17]. In the literature [
18,
19,
20,
21], Modified Particle Swarm Optimization (M-PSO) and AFSA were used to locate the target using the Least Square method. The literature [
22,
23,
24] used PSO to optimize sensing data such as GPS, inertial sensors, and speedometers for vehicle positioning. In literature [
25,
26], using PSO, Artificial Neural Network (ANN), and Levenberg Marquardt (LM) training methods, RSSI received by a fixed anchor node from a moving target point was taken as ANN input. The number of hidden layers and the learning rate of the ANN were determined by PSO, and the target localization was estimated by this method. In contrast to the stationary reference node method for target localization estimation, RSSI received from mobile nodes was used in this study, along with a swarm algorithm to mimic the foraging properties of organisms. The highest points of food sources (RSSI values) are located through the continuous movement of nodes. However, to improve the accuracy of this architecture, it is necessary to increase the number of sensor nodes, which will increase the cost.
This paper discusses the influence of the initial location arrangement and the number of particles in the PSO algorithm used for target localization and tracking. The impact of fixed weight and adaptive weight on improving the PSO algorithm is also considered in the paper. In addition, a Region Segmentation Method (RSM) is proposed in the paper for reducing the localization time investigated. Meanwhile, this paper proposes a Dynamic Individual Selection (DIS) Method for target tracking systems to reduce the computing complexity in the PSO algorithm, examined through simulations.
The rest of the paper is as follows.
Section 2 presents the literature review, and the system architecture is introduced in
Section 3.
Section 4 describes the simulation experiment and results. Finally, a conclusion is given in
Section 5.
5. Conclusions
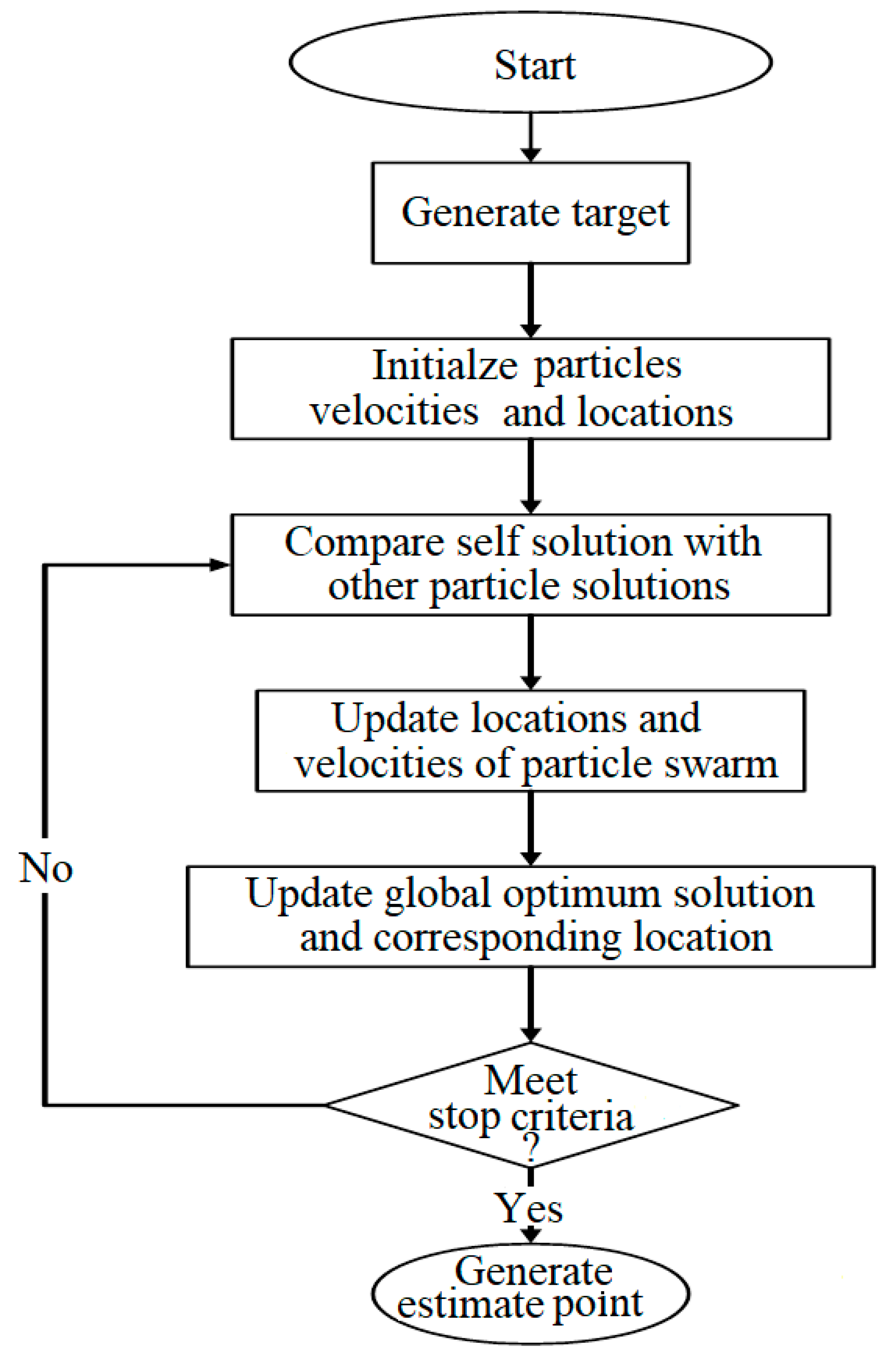
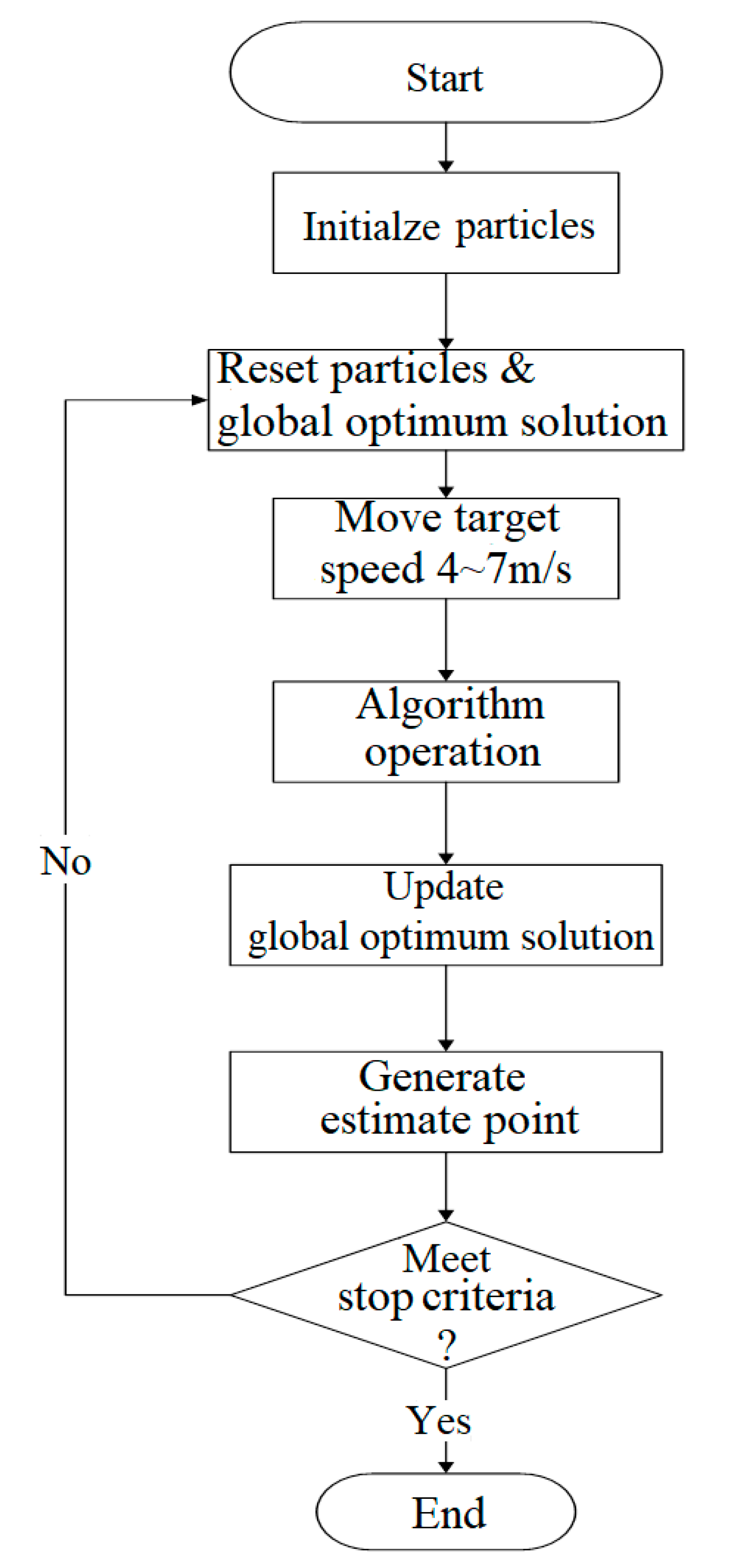
In this paper, PSO is used to study indoor target localization and tracking. The simulation results show that the more algorithms used, the better the accuracy and stability of target location estimation, but the longer the time for target location estimation, so this paper proposes a region segmentation method (RSM). The simulation results show that the proposed RSM method can reduce the number of particles used in the PSO algorithm and improve the speed of positioning and tracking without affecting the accuracy of target localization and tracking. The total average localization time for target localization and tracking with the RSM method can be reduced by 48.95% and 34.14%, respectively, and the average accuracy of target tracking reaches up to 93.09%.
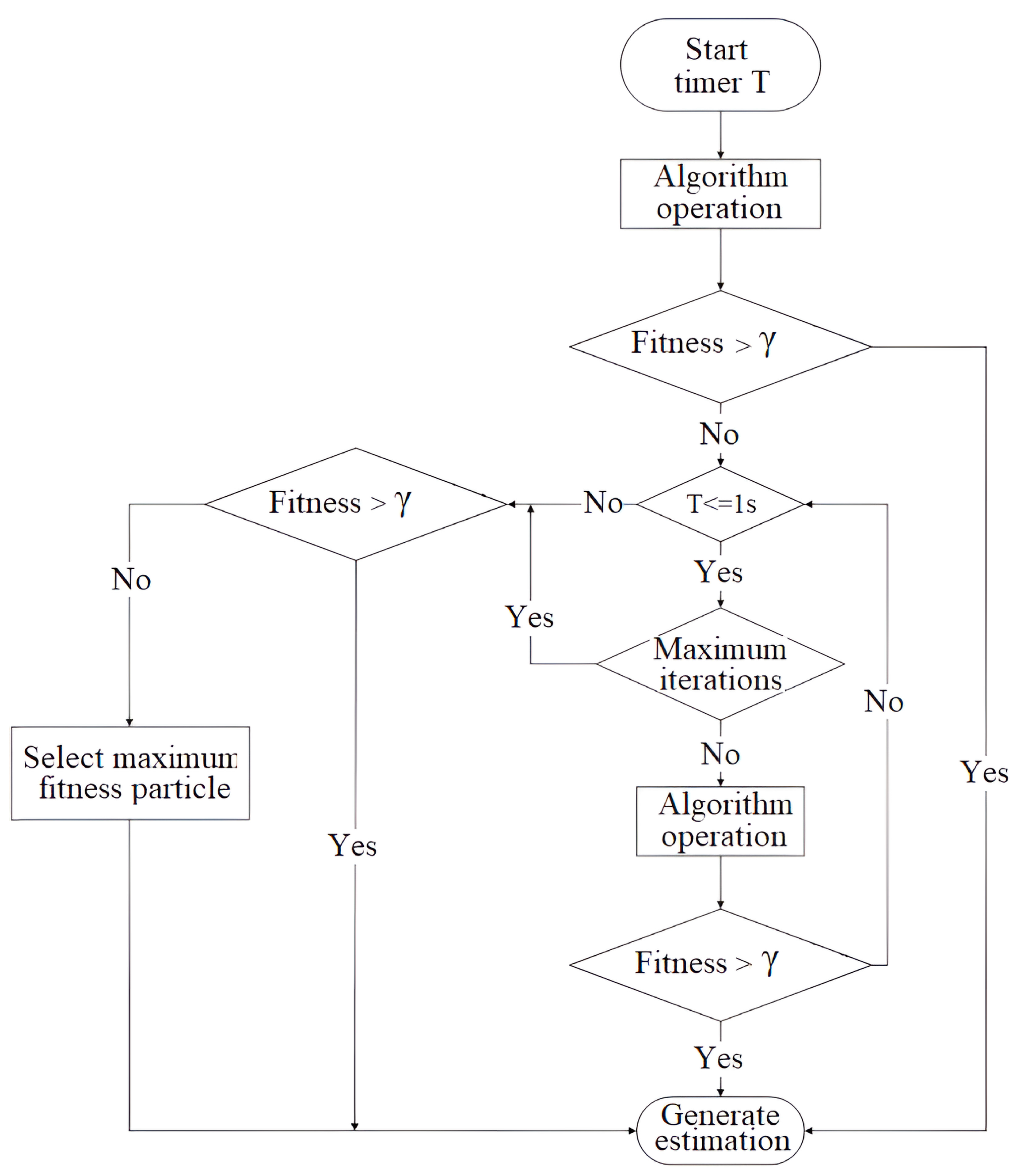
In addition, the DIS method is proposed in the target tracking system to further reduce the number of algorithm individuals used in target location estimation. The simulation results show that the DIS can indeed use fewer individuals than the original number of individuals to achieve a good target tracking effect when the number of individuals is large. However, when the number of algorithms is small, the success rate of target tracking will greatly decrease when the DIS method is used in the target tracking system. By adding RSM and DIS into the target tracking system, the average target tracking success rate of 96.8% can be achieved by using a small number of individuals in the algorithms.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}