
Active Disturbance Rejection-Based Performance Optimization and Control Strategy for Proton-Exchange Membrane Fuel Cell System

Abstract
:1. Introduction
- (1)
- The mathematical model of the PEMFC air supply system is developed, and an ADRC method is employed for OER control.
- (2)
- The result of ADRC OER control is compared with that of other methods, which shows that the ADRC can better reduce overshoot, shorten the stabilization time, and improve the dynamic response.
- (3)
- An ORCS based on maximal net power output is proposed, which can achieve better system output performance than FRCS.
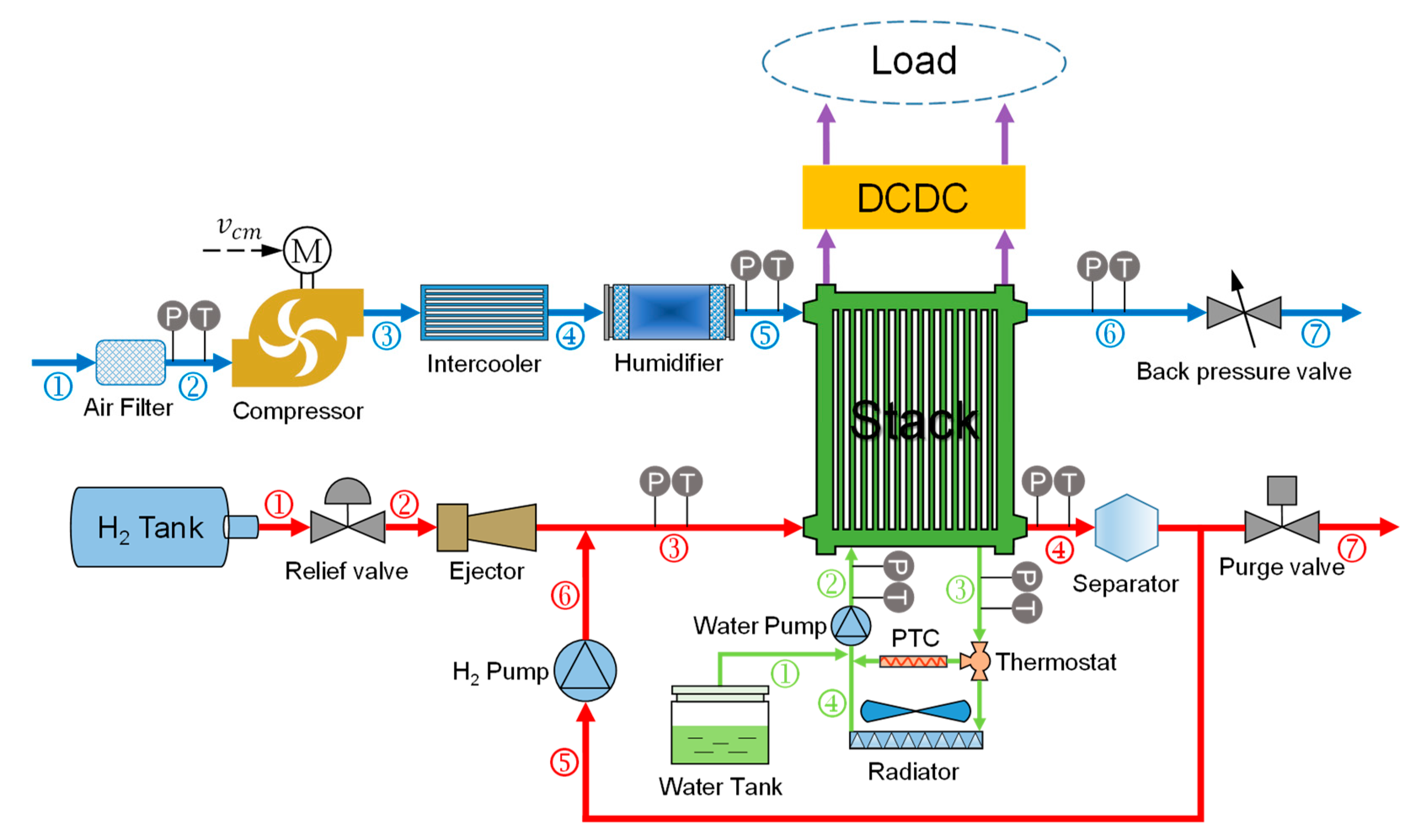
2. System Mathematical Modelling
- (1)
- All gases are ideal gases and obey the ideal gas law;
- (2)
- The ratio of N2 to O2 in the air is 79:21;
- (3)
- The hydrogen excess ratio () is 1;
- (4)
- The PEMFC is capable of maintaining a constant stack temperature of 353.15 K.
2.1. Electrochemical Model
2.2. Air Compressor
2.3. Cathode Model
3. Control Strategy for Air-Feed System
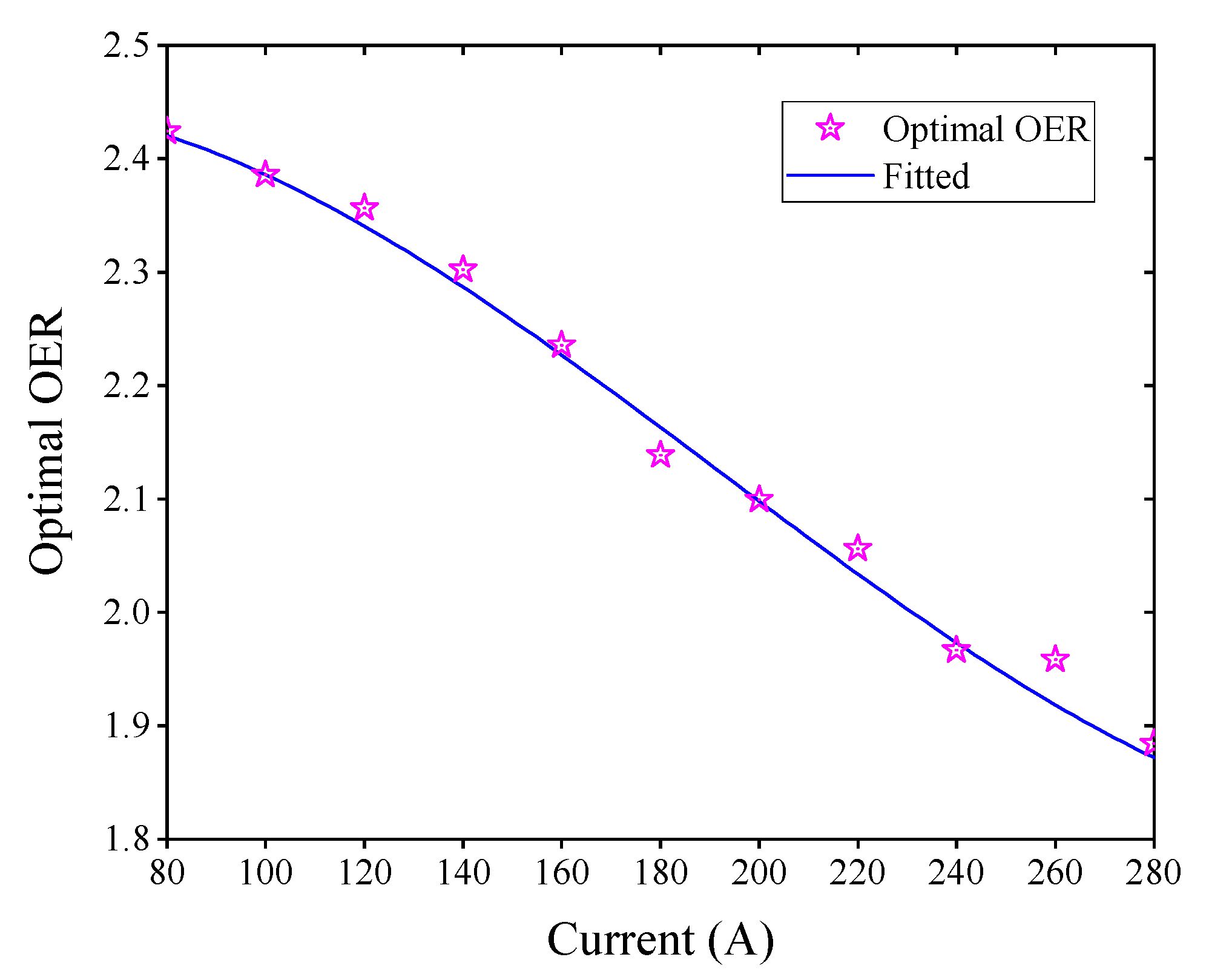
3.1. Fitting of the Optimal OER
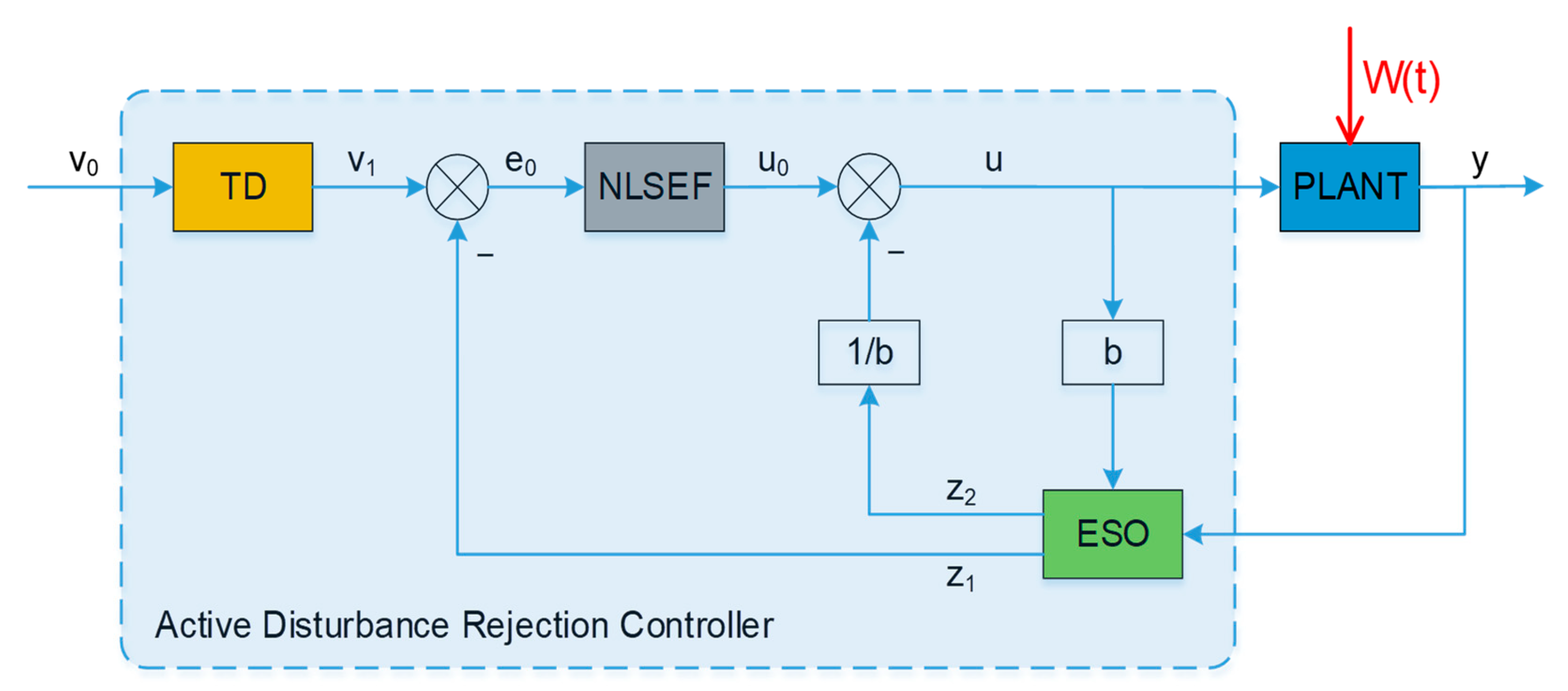
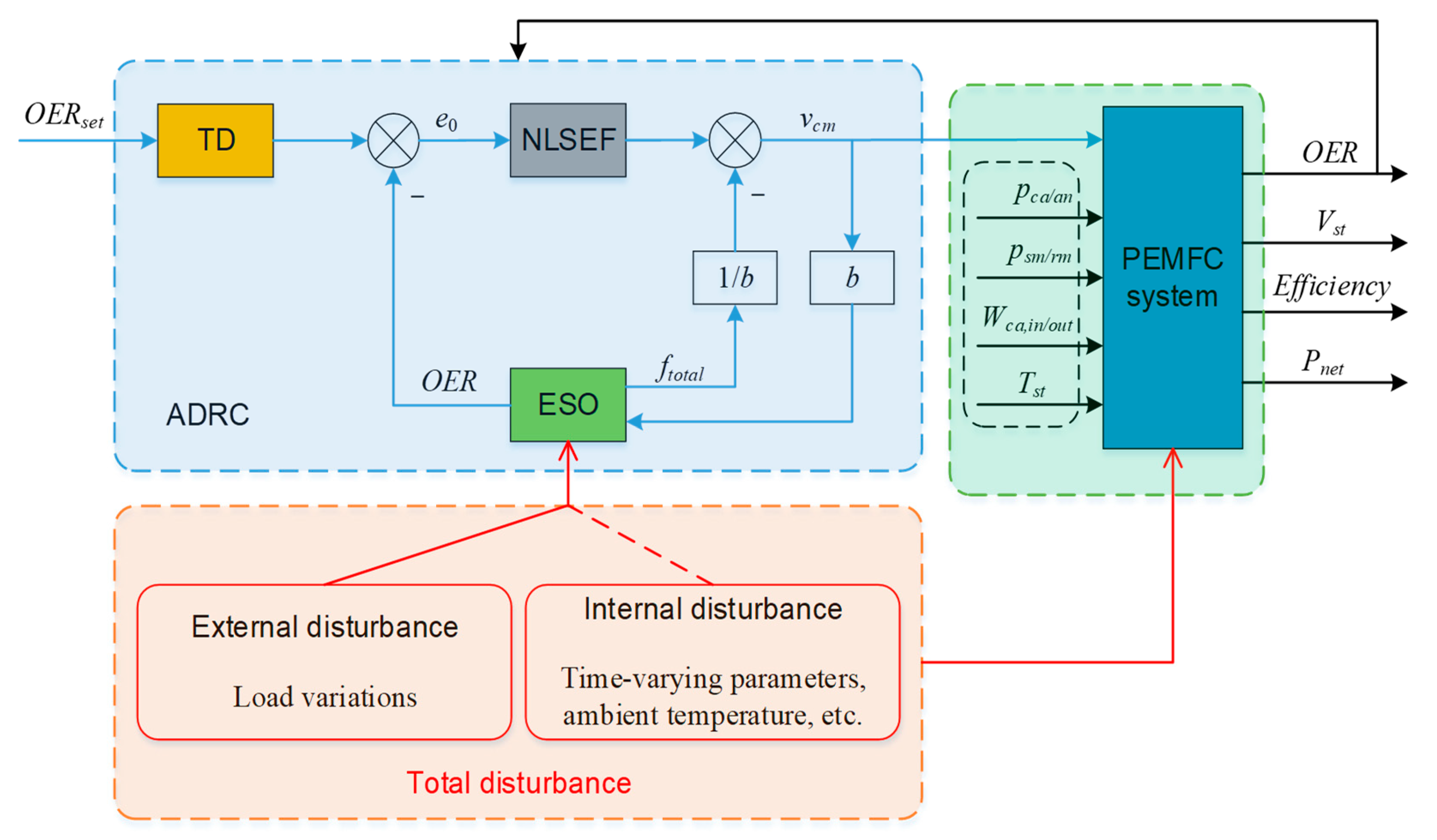
3.2. ADRC Algorithm
4. Results and Discussion
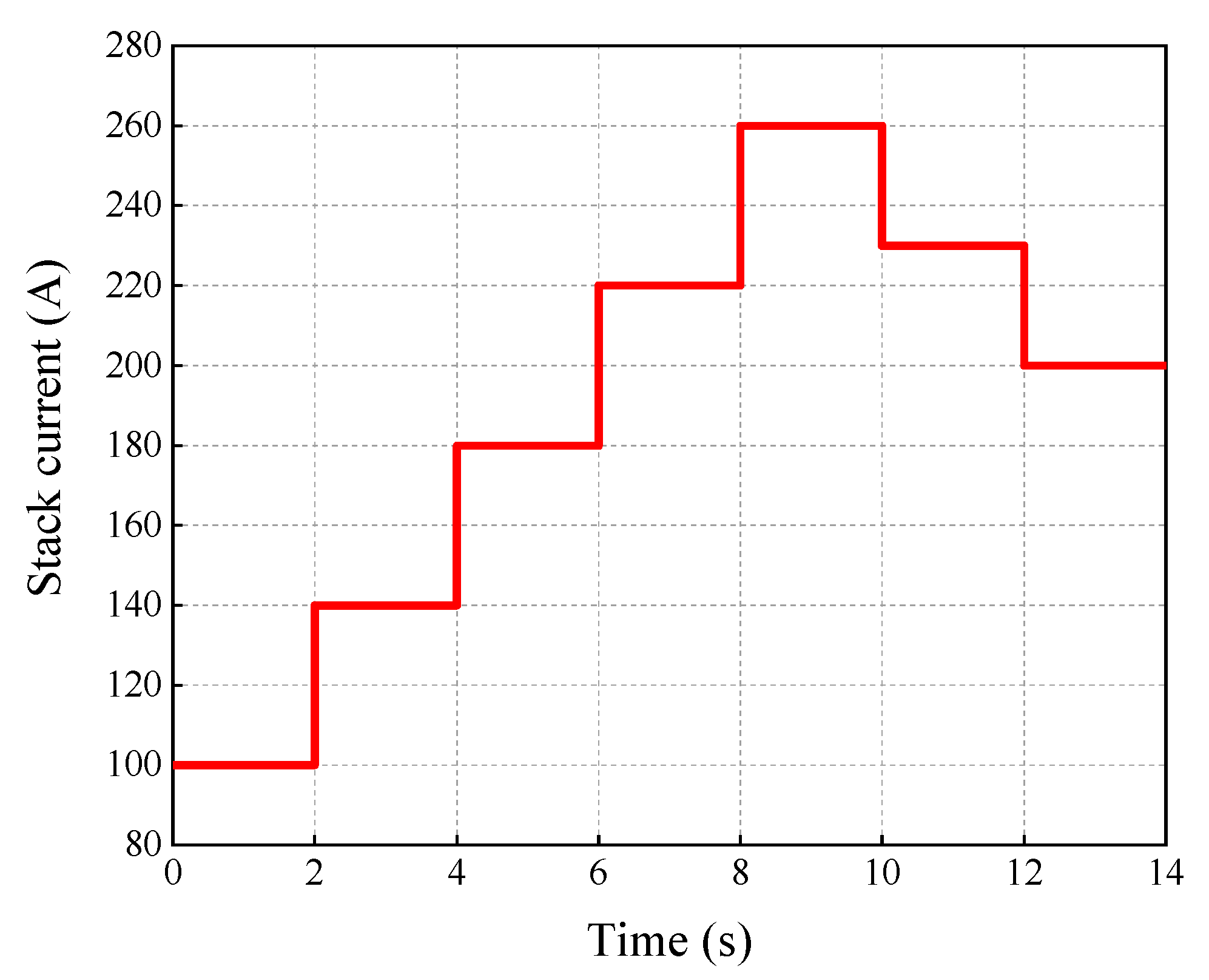
4.1. Simulation Scenario
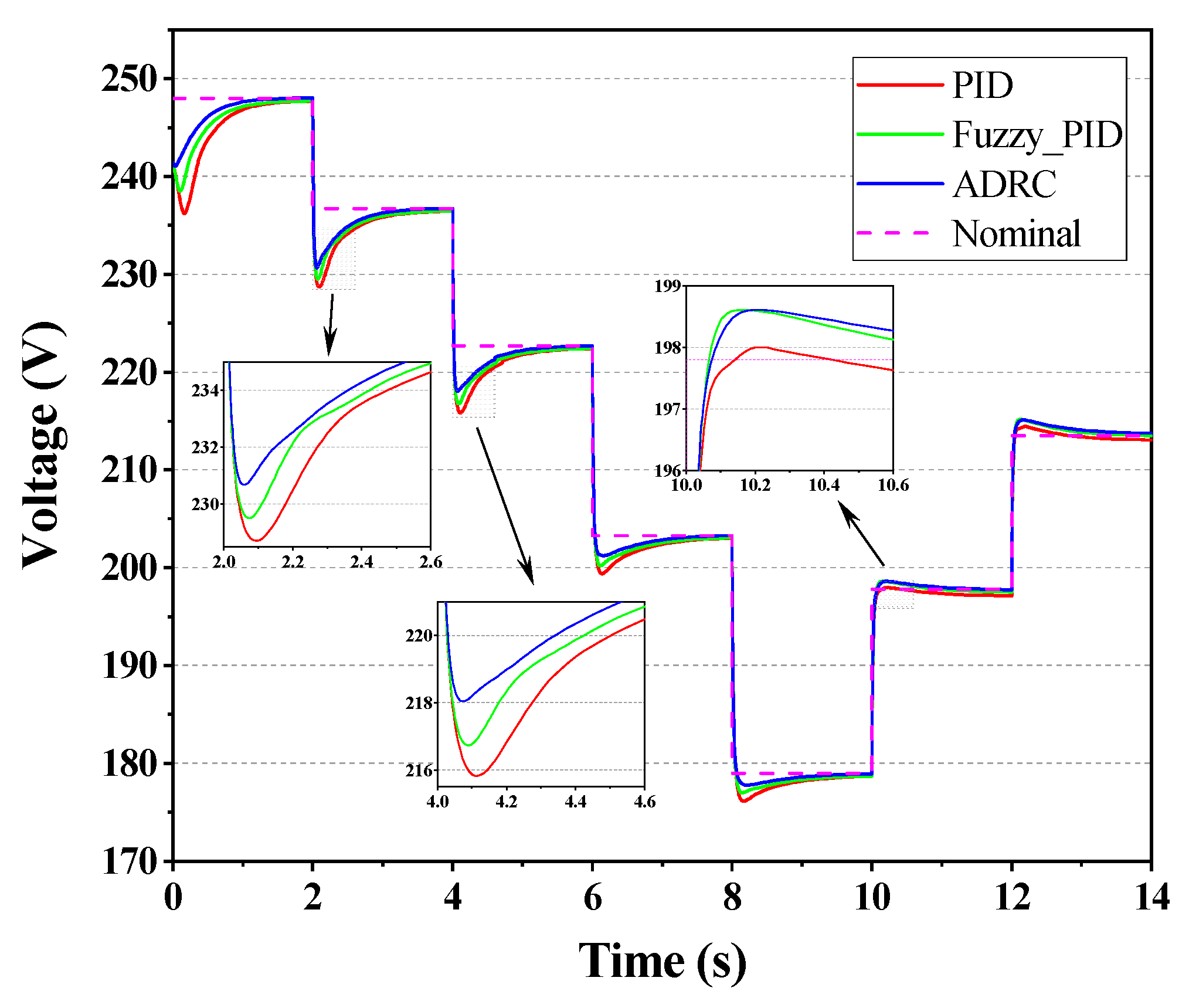
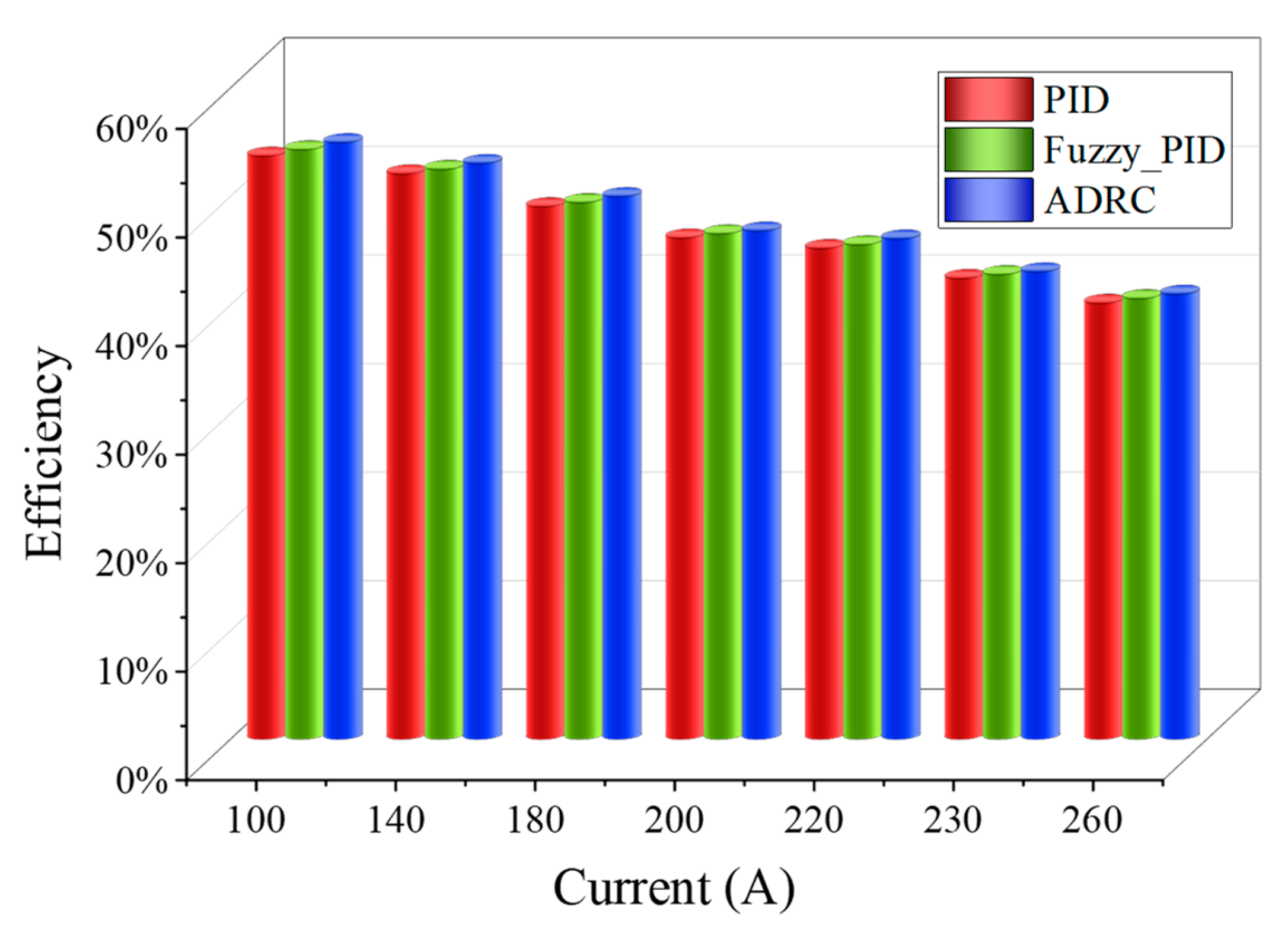
4.2. The Performance Comparison of Different Control Methods in PEMFC OER Control
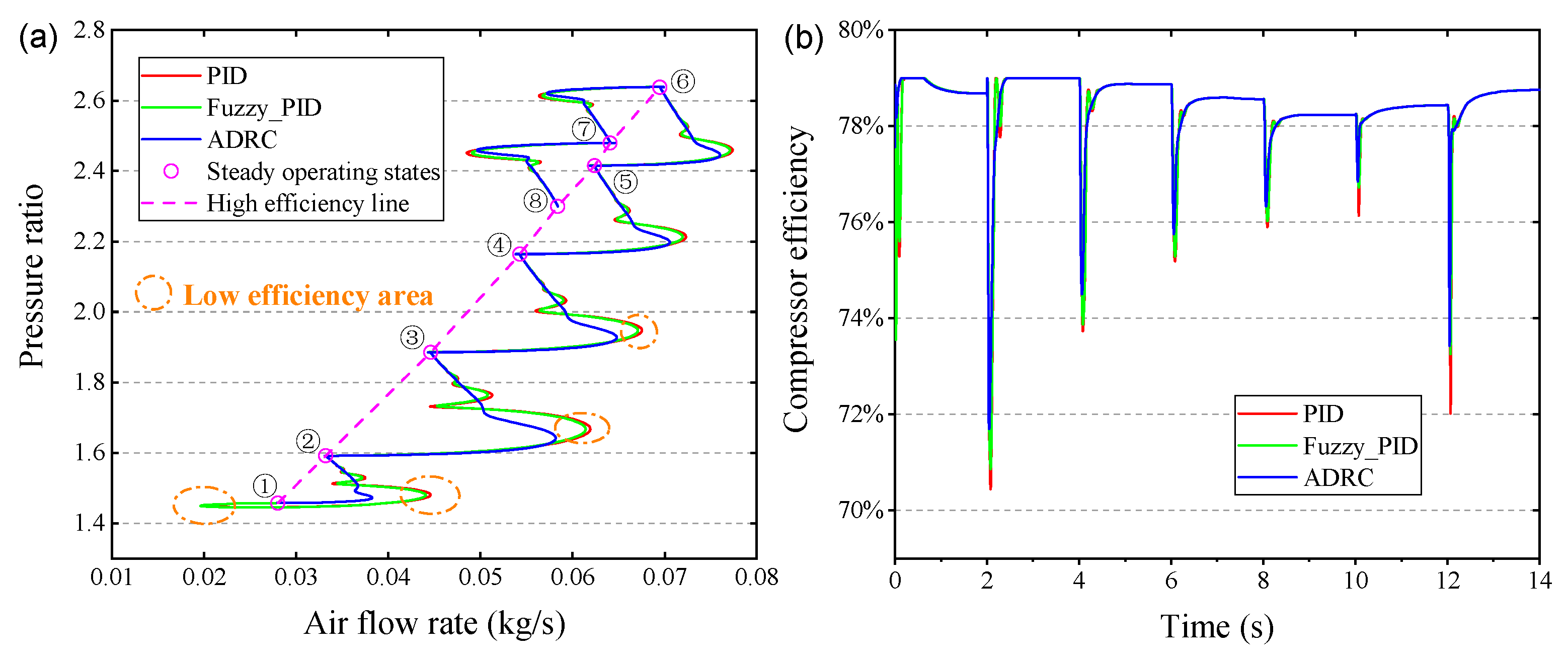
4.3. Performance Verification of ORCS
5. Conclusions
- (1)
- Compared with PID and fuzzy-PID control, the ADRC can significantly improve the control performance with a lower control cost and less wear on the compressor; the IAE of OER control is reduced by up to 50%.
- (2)
- Since the air can be fed to the fuel cell more promptly to cope with the sudden current changes in load-pulling conditions, the output voltage is improved and the PEMFC efficiency is increased by up to 1.84% under the ADRC OER control.
- (3)
- The system performance of the ADRC OER control under ORCS and FRCS is also discussed. The results indicate that the ORCS increases the system net output power by up to 1.85% compared with FRCS.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| PEMFC | Proton-Exchange Membrane Fuel Cell | V | Voltage (V) or volume (m3) |
| OER | Oxygen Excess Ratio | I | Current (A) |
| ADRC | Active Disturbance Rejection Control | Greek symbols | |
| GHG | Greenhouse Gases | Ratio of the specific heats of air | |
| ICEV | Internal Combustion Engine Vehicle | Density (kg/m3) | |
| PID | Proportion–Integral–Differential | Efficiency (%) | |
| FLC | Fuzzy Logic Control | Membrane water content | |
| SMC | Sliding Mode Control | Relative humidity (%) | |
| MRAC | Model-Referenced Adaptive Control | Excess ratio | |
| MPC | Model Predictive Control | Angular speed (rad/s) | |
| DDRL | Distributed Deep Reinforcement Learning | Torque (N⋅m) | |
| AC | Alternating Current | Filter factor | |
| DC | Direct Current | Error | |
| ORCS | Optimal-Reference Control Strategy | Subscripts | |
| FRCS | Fixed-Reference Control Strategy | atm | Atmospheric |
| BOP | Balance of Plant | ca | Cathode |
| PTC | Positive Temperature Coefficient | cm | Compressor motor |
| TD | Tracking Differentiator | cp | Compressor |
| ESO | Extended State Observer | fc | Fuel cell |
| NLSEF | Nonlinear State Error Feedback | st | Stack |
| CPU | Central Processing Unit | m | Membrane |
| RAM | Random Access Memory | H2 | Hydrogen |
| RMSE | Root Mean Square Error | O2 | Oxygen |
| MAE | Mean Absolute Error | N2 | Nitrogen |
| IAE | Integral Absolute Error | sat | Saturation |
| TV | Total Variation | sm | Supply manifold |
| HiL | Hardware-in-the-Loop | rm | Return manifold |
| Pressure (Pa) | in | Inlet | |
| T | Temperature (K) | out | Outlet |
| W | Mass flow rate (kg/s) | ref | Reference |
| P | Power (kW) | t | Trajectory |
References
- Wei, H.; He, C.; Li, J.; Zhao, L. Online estimation of driving range for battery electric vehicles based on SOC-segmented actual driving cycle. J. Energy Storage 2022, 49, 104091. [Google Scholar] [CrossRef]
- Chen, X.; Shuai, C.; Wu, Y.; Zhang, Y. Analysis on the carbon emission peaks of China’s industrial, building, transport, and agricultural sectors. Sci. Total. Environ. 2019, 709, 135768. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Zhang, B.; Xu, S. Research on air mass flow-pressure combined control and dynamic performance of fuel cell system for vehicles application. Appl. Energy 2022, 309, 118446. [Google Scholar] [CrossRef]
- Shen, J.; Du, C.; Yan, F.; Chen, B.; Tu, Z. Experimental study on the dynamic performance of a power system with dual air-cooled PEMFC stacks. Appl. Energy 2022, 326, 120025. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Z.; Wang, F.; Ouyang, Q.; Su, H. Optimal Oxygen Excess Ratio Control for PEM Fuel Cells. IEEE Trans. Control. Syst. Technol. 2017, 26, 1711–1721. [Google Scholar] [CrossRef]
- Yousfi-Steiner, N.; Moçotéguy, P.; Candusso, D.; Hissel, D. A review on polymer electrolyte membrane fuel cell catalyst degradation and starvation issues: Causes, consequences and diagnostic for mitigation. J. Power Sources 2009, 194, 130–145. [Google Scholar] [CrossRef]
- Chen, H.; Zhao, X.; Zhang, T.; Pei, P. The reactant starvation of the proton exchange membrane fuel cells for vehicular applications: A review. Energy Convers. Manag. 2019, 182, 282–298. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Z.; Ye, X.; Yi, L.; Xu, S.; Zhang, T. Air flow and pressure optimization for air supply in proton exchange membrane fuel cell system. Energy 2021, 238, 121949. [Google Scholar] [CrossRef]
- Hou, J.; Yang, M.; Ke, C.; Zhang, J. Control logics and strategies for air supply in PEM fuel cell engines. Appl. Energy 2020, 269, 115059. [Google Scholar] [CrossRef]
- Pukrushpan, J.; Stefanopoulou, A.; Peng, H. Control of Fuel Cell Power Systems: Principles, Modeling, Analysis and Feedback Design; Springer Science & Business Media: New York, NY, USA, 2004. [Google Scholar]
- Suh, K. Modeling, Analysis and Control of Fuel Cell Hybrid Power Systems. Department of Mechanical Engineering; The University of Michigan: Ann Arbor, MI, USA, 2006. [Google Scholar]
- Daud, W.; Rosli, R.; Majlan, E.; Hamid, S.; Mohamed, R.; Husaini, T. PEM fuel cell system control: A review. Renew. Energy 2017, 113, 620–638. [Google Scholar] [CrossRef]
- Williams, J.G.; Liu, G.; Chai, S.; Rees, D. Intelligent control for improvements in PEM fuel cell flow performance. Int. J. Autom. Comput. 2008, 5, 145–151. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Wang, D. Adaptive robust control of oxygen excess ratio for PEMFC system based on type-2 fuzzy logic system. Inf. Sci. 2019, 511, 1–17. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, H.; Peng, L.; Ye, X.; Xu, S.; Zhang, T. Feedforward-decoupled closed-loop fuzzy proportion-integral-derivative control of air supply system of proton exchange membrane fuel cell. Energy 2021, 240, 122490. [Google Scholar] [CrossRef]
- Baroud, Z.; Benmiloud, M.; Benalia, A.; Ocampo-Martinez, C. Novel hybrid fuzzy-PID control scheme for air supply in PEM fuel-cell-based systems. Int. J. Hydrogen Energy 2017, 42, 10435–10447. [Google Scholar] [CrossRef] [Green Version]
- Pilloni, A.; Pisano, A.; Usai, E. Observer-Based Air Excess Ratio Control of a PEM Fuel Cell System via High-Order Sliding Mode. IEEE Trans. Ind. Electron. 2015, 62, 5236–5246. [Google Scholar] [CrossRef] [Green Version]
- Matraji, I.; Laghrouche, S.; Jemei, S.; Wack, M. Robust control of the PEM fuel cell air-feed system via sub-optimal second order sliding mode. Appl. Energy 2013, 104, 945–957. [Google Scholar] [CrossRef]
- Han, J.; Yu, S.; Yi, S. Adaptive control for robust air flow management in an automotive fuel cell system. Appl. Energy 2017, 190, 73–83. [Google Scholar] [CrossRef]
- Han, J.; Yu, S.; Yi, S. Oxygen excess ratio control for proton exchange membrane fuel cell using model reference adaptive control. Int. J. Hydrogen Energy 2019, 44, 18425–18437. [Google Scholar] [CrossRef]
- Yang, D.; Pan, R.; Wang, Y.; Chen, Z. Modeling and control of PEMFC air supply system based on T-S fuzzy theory and predictive control. Energy 2019, 188, 116078. [Google Scholar] [CrossRef]
- Wang, Y.; Li, H.; Feng, H.; Han, K.; He, S.; Gao, M. Simulation study on the PEMFC oxygen starvation based on the coupling algorithm of model predictive control and PID. Energy Convers. Manag. 2021, 249, 114851. [Google Scholar] [CrossRef]
- Li, J.; Yang, B.; Yu, T. Distributed deep reinforcement learning-based coordination performance optimization method for proton exchange membrane fuel cell system. Sustain. Energy Technol. Assessments 2021, 50, 101814. [Google Scholar] [CrossRef]
- Li, J.; Yu, T. Intelligent Controller Based on Distributed Deep Reinforcement Learning for PEMFC Air Supply System. IEEE Access 2021, 9, 7496–7507. [Google Scholar] [CrossRef]
- Heidary, J.; Gheisarnejad, M.; Khooban, M.H. Stability Enhancement and Energy Management of AC-DC Microgrid based on Active Disturbance Rejection Control. Electr. Power Syst. Res. 2023, 217, 109105. [Google Scholar] [CrossRef]
- Li, D.; Li, C.; Gao, Z.; Jin, Q. On active disturbance rejection in temperature regulation of the proton exchange membrane fuel cells. J. Power Sources 2015, 283, 452–463. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.; Liu, Q.; Chen, Y.; Wang, X.; Li, W.; Ding, Y.; Wan, Z. Active disturbance rejection control strategy applied to cathode humidity control in PEMFC system. Energy Convers. Manag. 2020, 224, 113389. [Google Scholar] [CrossRef]
- Sun, L.; Jin, Y.; You, F. Active disturbance rejection temperature control of open-cathode proton exchange membrane fuel cell. Appl. Energy 2019, 261, 114381. [Google Scholar] [CrossRef]
- Wu, D.; Peng, C.; Yin, C.; Tang, H. Review of System Integration and Control of Proton Exchange Membrane Fuel Cells. Electrochem. Energy Rev. 2020, 3, 466–505. [Google Scholar] [CrossRef]
- Gong, Z.; Wang, B.; Xu, Y.; Ni, M.; Gao, Q.; Hou, Z.; Cai, J.; Gu, X.; Yuan, X.; Jiao, K. Adaptive optimization strategy of air supply for automotive polymer electrolyte membrane fuel cell in life cycle. Appl. Energy 2022, 325, 119839. [Google Scholar] [CrossRef]
- Pukrushpan, J. Modeling and Control of Fuel Cell Systems and Fuel Processors. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2003. [Google Scholar]
- Sanchez, V.M.; Barbosa, R.; Arriaga, L.; Ramirez, J.M. Real time control of air feed system in a PEM fuel cell by means of an adaptive neural-network. Int. J. Hydrogen Energy 2014, 39, 16750–16762. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process Control 2003, 13, 291–309. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Universal gas constant, J/(mol⋅K) | 8.314 | |
| Air gas constant, J/(kg⋅K) | 286.9 | |
| Oxygen gas constant, J/(kg⋅K) | 259.8 | |
| Nitrogen gas constant, J/(kg⋅K) | 296.8 | |
| Vapor gas constant, J/(kg⋅K) | 461.5 | |
| Air molar mass, kg/mol | 29 × 10−3 | |
| Oxygen molar mass, kg/mol | 32 × 10−3 | |
| Nitrogen molar mass, kg/mol | 28 × 10−3 | |
| Vapor molar mass, kg/mol | 18.02 × 10−3 | |
| Atmospheric pressure, Pa | 1.01325 × 105 | |
| Atmospheric temperature, K | 298.15 | |
| Air specific heat ratio | 1.4 | |
| Air specific heat capacity | 1004 | |
| Air density, kg/m3 | 1.23 | |
| Gibbs free energy change, J/mol | 237.2 × 103 | |
| Reaction entropy, J/(mol⋅K) | 163.3 × 103 | |
| Faraday constant, C/mol | 96,485 |
| Parameter | Symbol | Value |
|---|---|---|
| Stack temperature, K | 353.15 | |
| Fuel cell active area, cm2 | 280 | |
| Membrane thickness, cm | 1.275 × 10−2 | |
| Maximum current density, A/cm2 | 2.2 | |
| Number of fuel cells | 381 | |
| Activation voltage loss constant | 10 | |
| Ohmic voltage loss constant | 350 | |
| Ohmic voltage loss constant | 0.005139 | |
| Ohmic voltage loss constant | 0.00326 | |
| Concentration voltage loss constant | 2 | |
| Motor constant, N⋅m/A | 0.0225 | |
| Motor constant, V/(rad⋅s) | 0.0153 | |
| Motor constant, Ω | 1.2 | |
| Compressor motor inertia, kg⋅m2 | 5 × 10−5 | |
| Compressor motor mechanical efficiency, % | 98 | |
| Cathode volume, m3 | 0.01 | |
| Supply manifold volume, m3 | 0.02 | |
| Return manifold volume, m3 | 0.005 | |
| Cathode inlet orifice constant, kg/(s⋅Pa) | 0.3629 × 10−5 | |
| Cathode outlet orifice constant, kg/(s⋅Pa) | 0.2177 × 10−5 |
| Method | Control Precision | Control Cost | |||
|---|---|---|---|---|---|
| RMSE | MAE | IAE | TV | ||
| PID | 0.1344 | 0.0697 | 0.1636 | 799.44 | 1.6218 |
| Fuzzy-PID | 0.1661 | 0.0916 | 0.1403 | 721.63 | 1.6181 |
| ADRC | 0.1084 | 0.0579 | 0.0818 | 629.63 | 1.5790 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, H.; Du, C. Active Disturbance Rejection-Based Performance Optimization and Control Strategy for Proton-Exchange Membrane Fuel Cell System. Electronics 2023, 12, 1393. https://doi.org/10.3390/electronics12061393
Wei H, Du C. Active Disturbance Rejection-Based Performance Optimization and Control Strategy for Proton-Exchange Membrane Fuel Cell System. Electronics. 2023; 12(6):1393. https://doi.org/10.3390/electronics12061393
Chicago/Turabian StyleWei, Heng, and Changqing Du. 2023. "Active Disturbance Rejection-Based Performance Optimization and Control Strategy for Proton-Exchange Membrane Fuel Cell System" Electronics 12, no. 6: 1393. https://doi.org/10.3390/electronics12061393