
Asynchronous Track-to-Track Association Based on Pseudo Nearest Neighbor Distance for Distributed Networked Radar System

Abstract
1. Introduction
- By defining the pseudo nearest neighbor distance between the coordinate points of the track and the track data set, the correlation degree between the tracks is established, and an asynchronous TTTA algorithm based on pseudo nearest neighbor distance is proposed. This algorithm does not need time domain alignment, reduces steps, effectively avoids introducing estimation bias, and directly associates the track data.
- The average correct association rate of the tracks of the algorithm under different cycle ratios, different delay startup times, and different noise distribution forms is analyzed, and the anti-interference and effectiveness of the algorithm are proved.
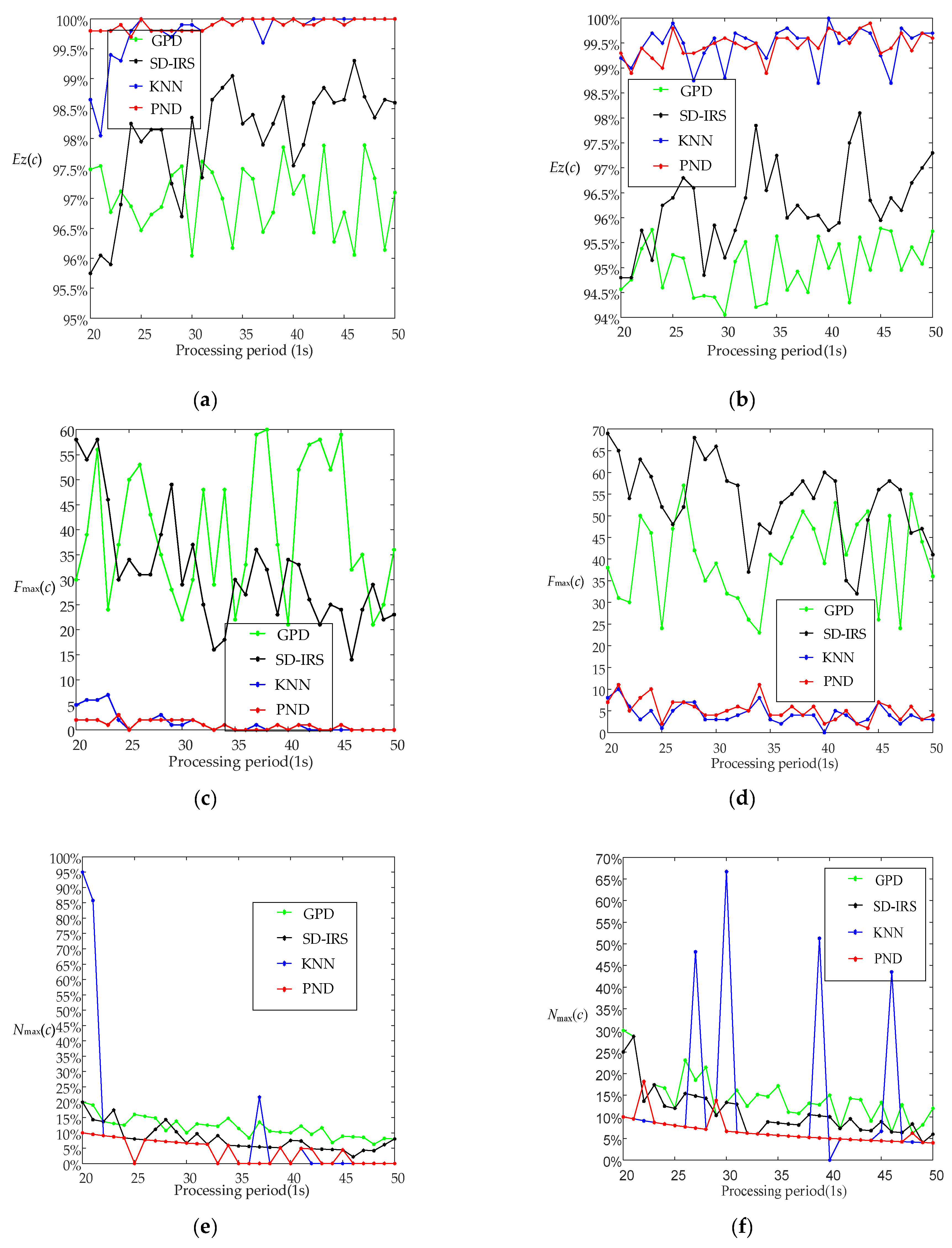
- In different targets’ moving environments, by changing the simulation conditions of the number of target batches and processing periods, the number of false associations, the maximum false association rates, and the average correct association rate of various algorithms are compared, which proves that the proposed algorithm has strong robustness and superiority.
2. Materials and Methods
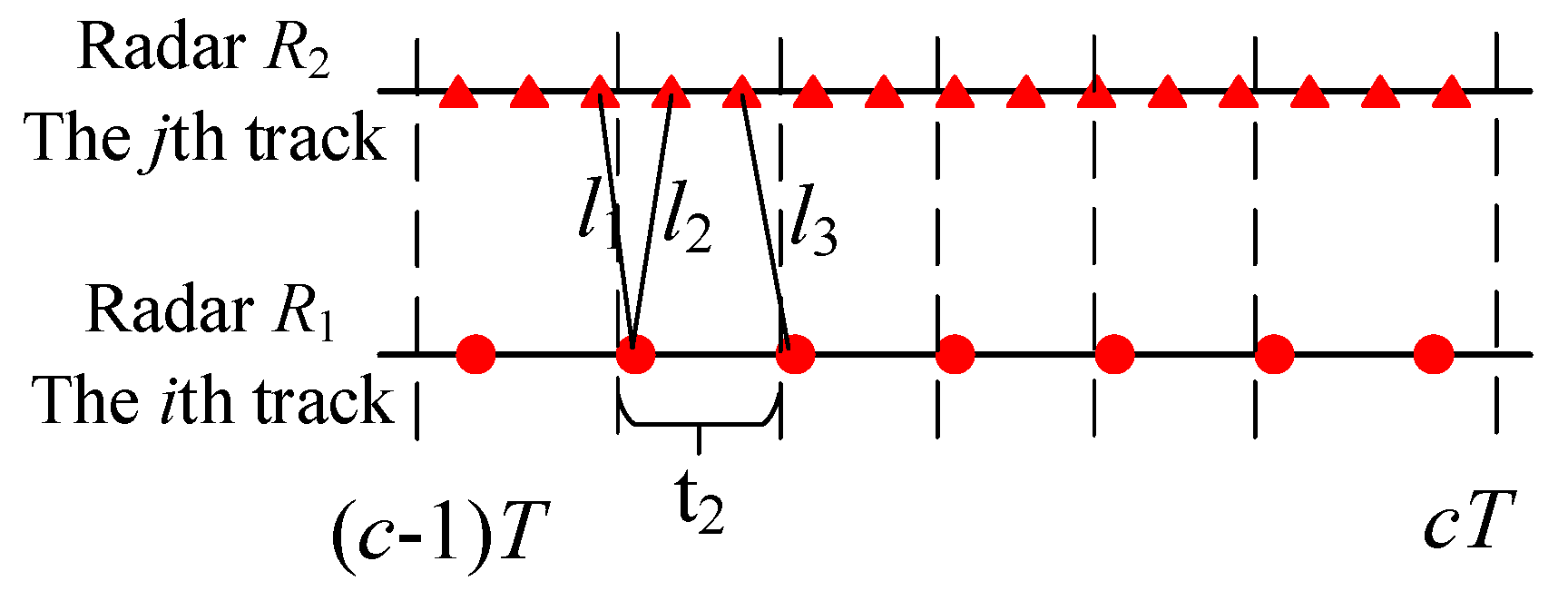
2.1. Mathematical Formula Definition
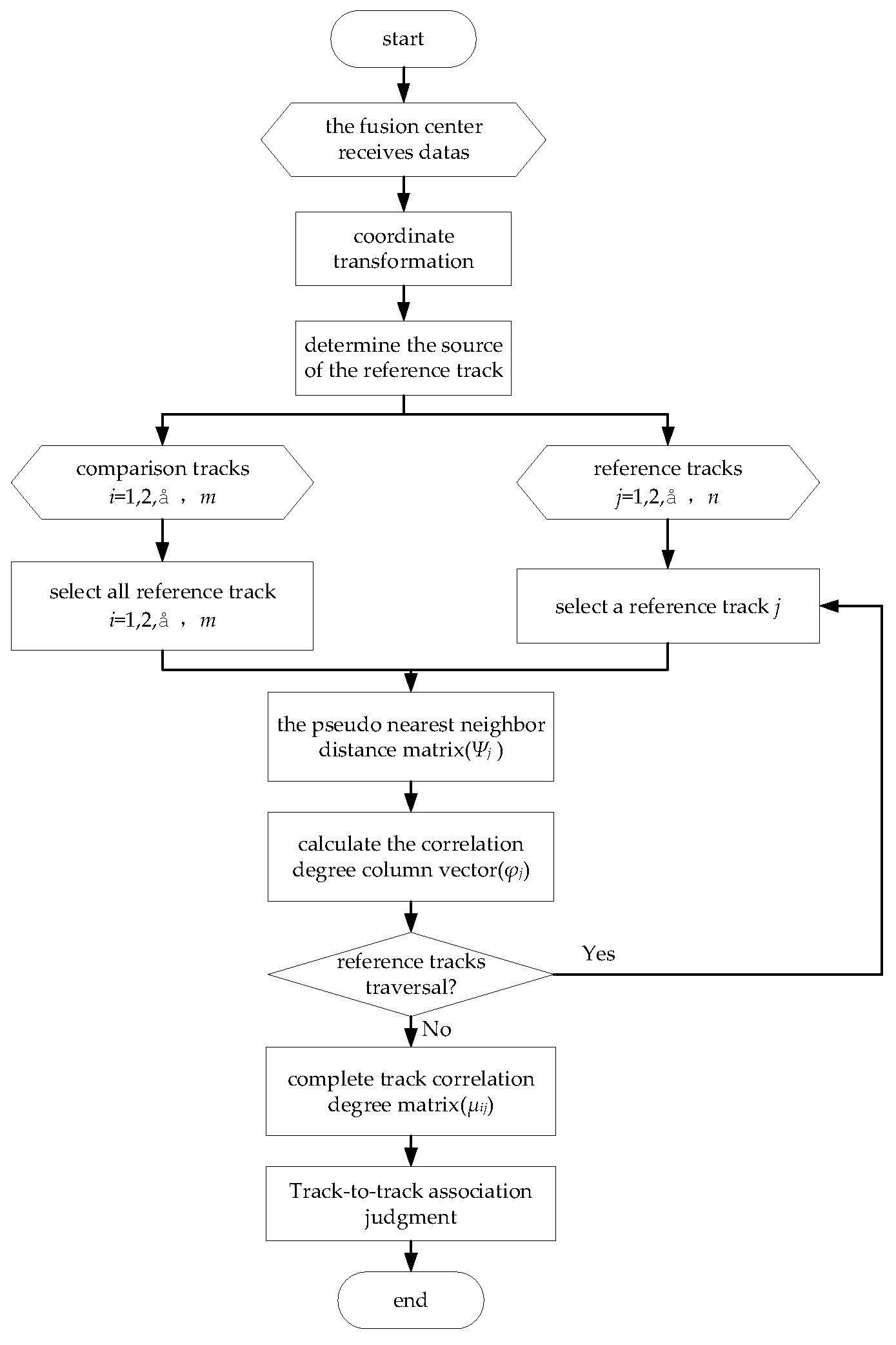
2.2. Asynchronous Track-to-Track Association Algorithm Based on Pseudo Nearest Neighbor Distance
2.2.1. Data Reception
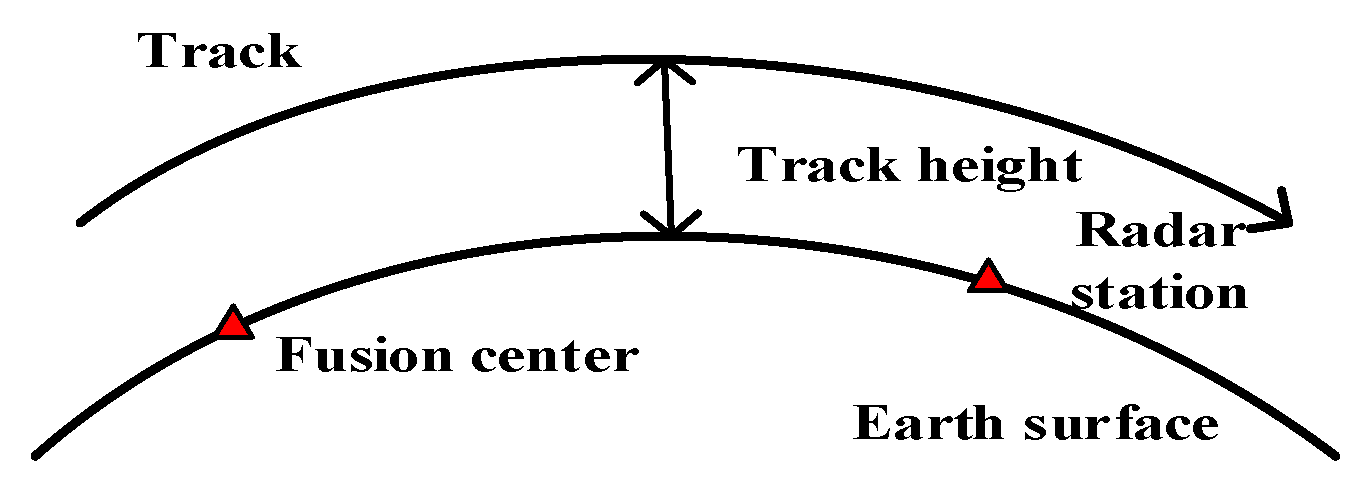
2.2.2. Coordinate Transformation
2.2.3. Reference Track Selection
2.2.4. Derivation of Track Correlation Matrix
2.2.5. Track-to-Track Association Judgment
3. Experiments and Performance Analysis
3.1. Simulation Environment and Evaluation Index
3.2. Algorithm Performance Analysis
3.2.1. Algorithm Effectiveness Analysis
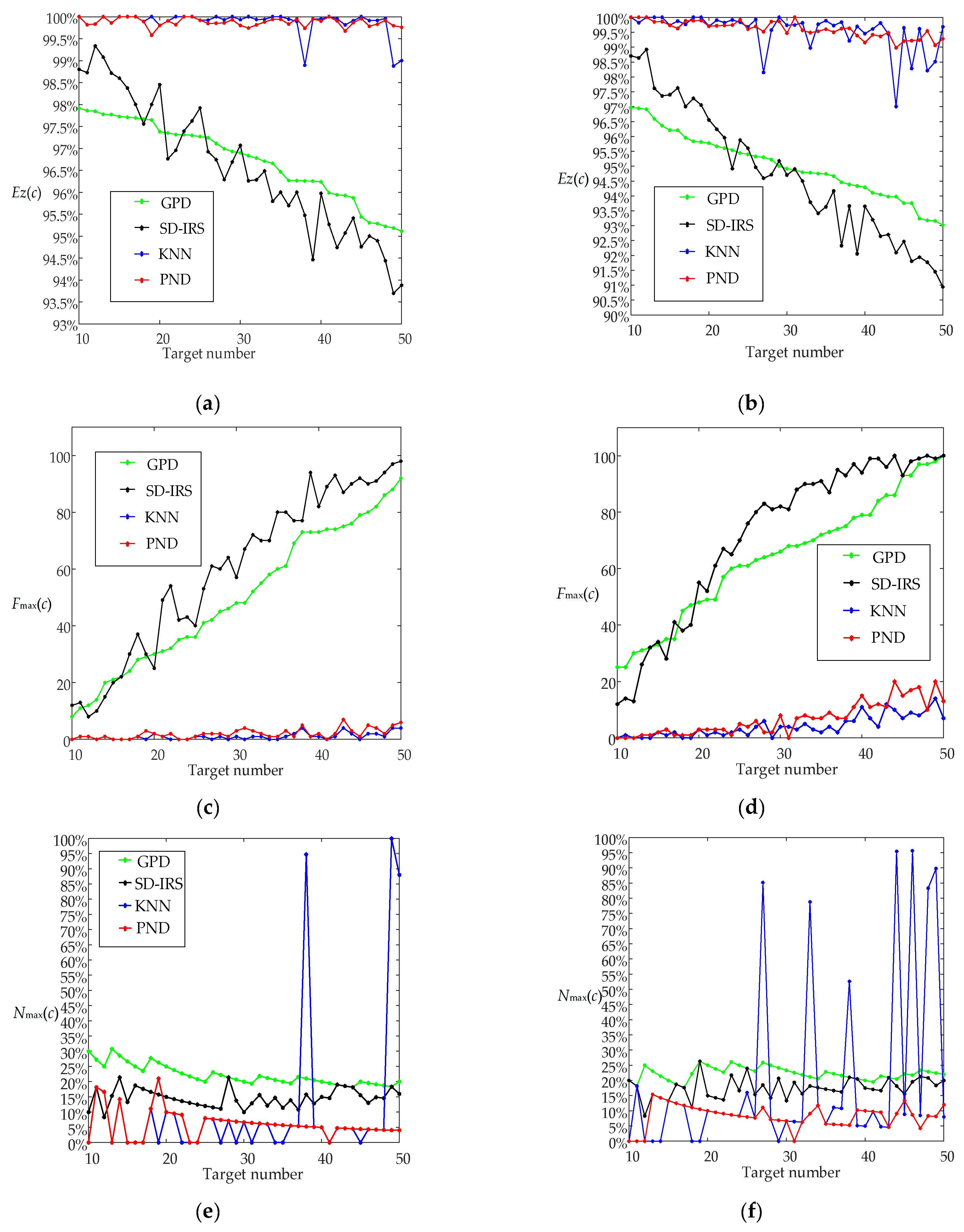
3.2.2. Analysis of Different Target Numbers and Different Movement Forms
3.2.3. Analysis of Different Processing Periods and Different Movement Forms
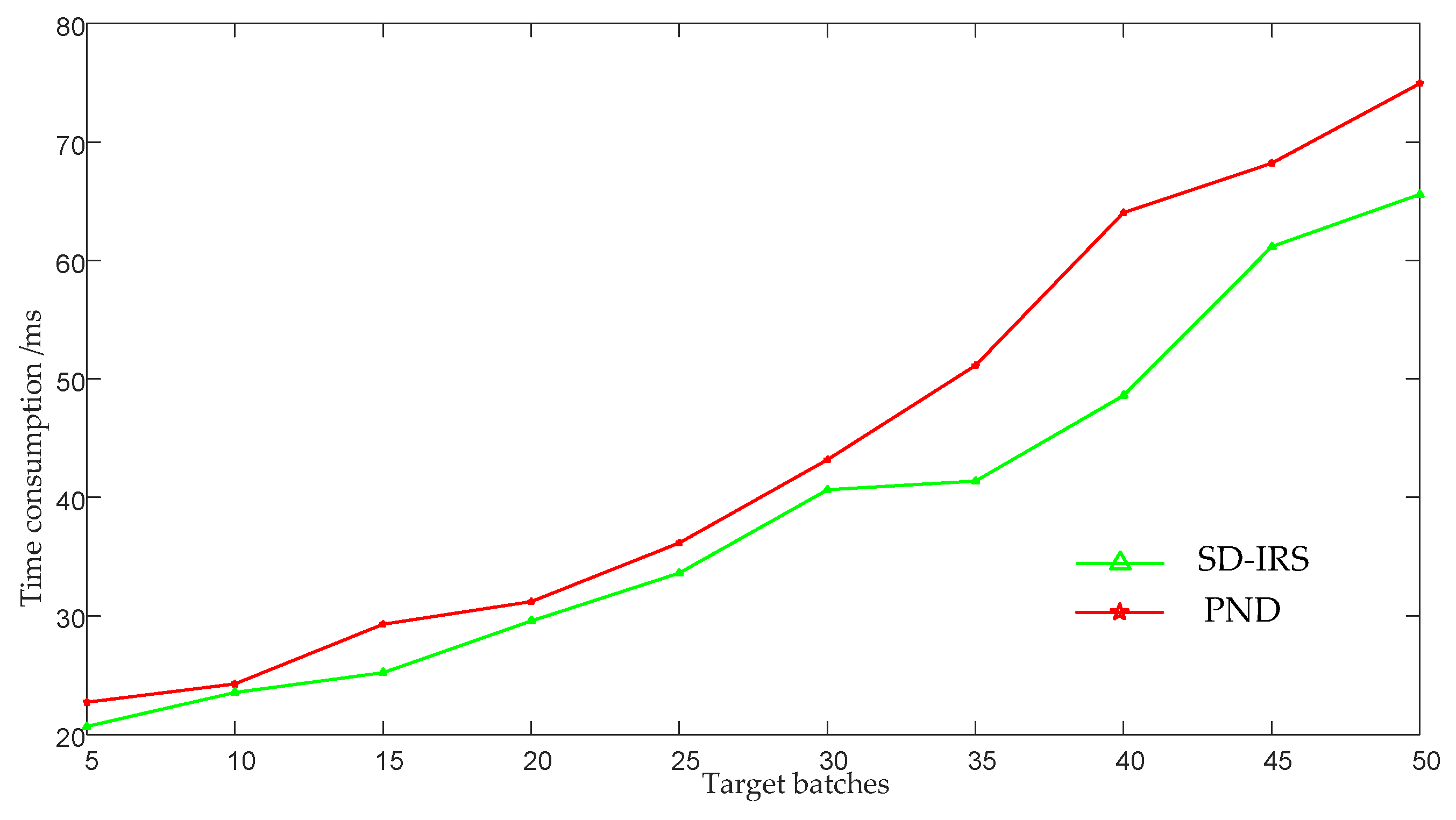
3.2.4. Algorithm Complexity Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Durr, A.; Schweizer, B.; Bechter, J.; Waldschmidt, C. Phase noise mitigation for multistatic FMCW radar sensor networks using carrier transmission. IEEE Microw. Wirel. Compon. Lett. 2018, 28, 1143–1145. [Google Scholar] [CrossRef]
- Ren, P.; Munari, A.; Petrova, M. Performance tradeoffs of joint radar-communication networks. IEEE Wirel. Commun. Lett. 2018, 8, 165–168. [Google Scholar] [CrossRef]
- Nazari, M.; Pashazadeh, S.; Mohammad-Khanli, L. An adaptive density-based fuzzy clustering track association for distributed tracking system. IEEE Access 2019, 7, 135972–135981. [Google Scholar] [CrossRef]
- Yang, D.; Ji, H.; Gao, Y. A robust D-S fusion algorithm for multi-target multi-sensor with higher reliability. Inf. Fusion 2019, 47, 47. [Google Scholar]
- He, X.; Wang, T.; Liu, W.; Luo, T. Measurement data fusion based on optimized weighted least-squares algorithm for multi-target tracking. IEEE Access 2019, 7, 13901–13916. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, W.A.; Yu, L.; Hu, G.; Song, H. Distributed fusion estimation with communication bandwidth constraints. IEEE Trans. Autom. Control 2015, 60, 1398–1403. [Google Scholar] [CrossRef]
- Okello, N.N.; Challa, S. Joint sensor registration and track-to-track fusion for distributed trackers. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 808–823. [Google Scholar] [CrossRef]
- Xu, L.; Jin, S.L.; Yin, G.S. A track association algorithm based on leader-follower on-line clustering in dense target environment. Radioengineering 2014, 23, 259–265. [Google Scholar]
- Zhu, H.; Wang, W.; Wang, C. Robust track-to-track association in the presence of sensor biases and missed detections. Inf. Fusion 2016, 27, 33–40. [Google Scholar] [CrossRef]
- Wang, X.; Xu, Z.; Gou, X. Consensus-based track association with multistatic sensors under a nested probabilistic-numerical linguistic environment. Sensors 2019, 19, 1381–1389. [Google Scholar] [CrossRef]
- Yu, Y.; Hou, Q.; Zhang, W.; Zhang, J. A sequential two-stage track-to-track association method in asynchronous bearings-only sensor networks for aerial targets surveillance. Sensors 2019, 19, 3175–3193. [Google Scholar] [CrossRef] [PubMed]
- Lian, F.; Hou, L.; Wei, B.; Han, C. Sensor selection for decentralized large-scale multi-target tracking network. Sensors 2018, 18, 4115–4123. [Google Scholar] [CrossRef] [PubMed]
- Kanyuck, A.J.; Singer, R.A. Correlation of multiple-site track data. IEEE Trans. Aerosp. Electron. Syst. 1970, 6, 180–187. [Google Scholar] [CrossRef]
- Jian, G.; You, H.; Ying-Ning, P. Distributed CFAR detector based on local test statistic. Signal Process. 2000, 80, 373–379. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, L.; Xiong, W.; Zhou, Z. GF-4 Satellite and automatic identification system data fusion for ship tracking. IEEE Geosci. Remote Sens. Lett. 2019, 16, 281–285. [Google Scholar] [CrossRef]
- Zhu, H.; Leung, H.; Yuen, K.V. A joint data association, registration, and fusion approach for distributed tracking. Inf. Sci. 2015, 324, 186–196. [Google Scholar] [CrossRef]
- Qi, L.; Dong, K.; Liu, Y. Anti-bias track-to-track association algorithm based on distance detection. IET Radar Sonar Navigat. 2017, 11, 269–276. [Google Scholar] [CrossRef]
- Bu, S.; Zhou, C.; Zhou, G. Simultaneous spatiotemporal bias and state estimation for asynchronous multi-sensor system. J. Eng. 2019, 19, 5824–5828. [Google Scholar] [CrossRef]
- Tian, W.; Wang, Y.; Shan, X.; Yang, J. Track-to-track association for biased data based on the reference topology feature. IEEE Signal Process. 2014, 21, 449–453. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, M.; Yuen, K.V.; Leung, H. Track-to-track association by coherent point drift. IEEE Signal Process. 2017, 24, 643–647. [Google Scholar] [CrossRef]
- Zheng, J.-C.; Wang, Y.; Lin, C.-C.; Zhang, X.-L.; Liu, J.; Ji, L.-W. A fusion algorithm of target dynamic information for asynchronous multi-sensors. Microsyst. Technol. 2018, 24, 3995–4005. [Google Scholar] [CrossRef]
- Sönmez, H.H.; Hocaoğlu, A.K. Asynchronous track-to-track association algorithm based on reference topology feature. Signal Image Video Process. 2021, 16, 789–796. [Google Scholar] [CrossRef]
- Sun, W.; Li, X.; Pang, Z.; Ji, Y.; Dai, Y.; Huang, W. Track-to-Track Association Based on Maximum Likelihood Estimation for T/R-R Composite Compact HFSWR. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–12. [Google Scholar] [CrossRef]
- Ahmed, I.; Jun, M.; Ding, Y. A Spatio-Temporal Track Association Algorithm Based on Marine Vessel Automatic Identification System Data. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20783–20797. [Google Scholar] [CrossRef]
- Cao, Y.; Cao, J.; Zhou, Z. Track Segment Association Method Based on Bidirectional Track Prediction and Fuzzy Analysis. Aerospace 2022, 9, 274. [Google Scholar] [CrossRef]
- Yi, X.; Zhang, H.W. A track association algorithm for distributed multi-target systems based on gray interval numbers. Acta Aeronaut. Astronaut. Sin. 2013, 34, 352–360. [Google Scholar]
- Zu, X.; Yang, C. An EGR performance evaluation and decision-making approach based on grey theory and grey entropy analysis. PLoS ONE 2018, 13, e0191626. [Google Scholar] [CrossRef]
- Yi, X.; Han, J.Y. Asynchronous track-to-track association algorithm based on similarity degree of interval-real sequence. Acta Aeronaut. Astronaut. Sin. 2015, 36, 1212–1220. [Google Scholar]
- Yi, X.; Du, J.P. Asynchronous track-to-track association algorithm based on discrete degree of segmented sequence. Acta Aeronaut. Astronaut. Sin. 2020, 41, 265–274. [Google Scholar]
- Xin, G.; You, H.; Xiao, Y. Gray track-to-track correlation algorithm for distributed multitarget tracking system. Signal Process. 2006, 86, 3448–3455. [Google Scholar] [CrossRef]
- Ristic, B.; Okello, N. Sensor registration in ECEF coordinates using the MLR algorithm. In Proceedings of the 2003 Sixth International Conference of Information Fusion, Cairns, QLD, Australia, 8–11 July 2003. [Google Scholar]
- Yi, X.; Zen, Y. Asynchronous track-to-track association algorithm based on k means distance of nearest neighbors. Syst. Eng. Electron. 2022, 44, 3515–3521. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Settings | Geographical Coordinates | Slope Range System Error | Azimuth Angle System Error | Pitch Angle System Error |
|---|---|---|---|---|
| R1 | (0°, 0°, 0 m) | 150 m | 0.01 rad | 0.02 rad |
| R2 | (0°, 0.2°, 0 m) | 100 m | 0.01 rad | 0.01 rad |
| The Processing Period of the FC | The Number of Targets | The Motion Starting Direction | The Motion Starting Velocity | The Sampling Period of Radar R2 |
|---|---|---|---|---|
| 50 s | 20 | 0~2π rad | 100~300 m/s | 4 s |
| Sampling Period Ratio | k = 1 | k = 1.5 | k = 2 | k = 2.5 | k = 3 |
|---|---|---|---|---|---|
| time-consuming(s) | 2.4318 | 1.6680 | 1.3570 | 1.1446 | 0.9537 |
| Startup Time Difference(s) | The Evaluation Indexes | Sampling Period Ratio | ||||
|---|---|---|---|---|---|---|
| k = 1 | k = 1.5 | k = 2 | k = 2.5 | k = 3 | ||
| 1 | 1 | 1 | 0 | 1 | 1 | |
| 99.9% | 99.9% | 100% | 99.9% | 99.9% | ||
| 1.5 | 0 | 0 | 0 | 0 | 1 | |
| 100% | 100% | 100% | 100% | 99.9% | ||
| 2 | 0 | 1 | 0 | 0 | 0 | |
| 100% | 99.9% | 100% | 100% | 100% | ||
| 2.5 | 1 | 0 | 1 | 0 | 1 | |
| 99.9% | 100% | 99.9% | 100% | 99.9% | ||
| Different Noise Distribution Forms | Gaussian Distribution | Rayleigh Distribution | Exponential Distribution | Uniform Distribution |
|---|---|---|---|---|
| 99% | 100% | 99% | 100% |
| The Processing Period of the FC | The Motion Starting Direction | The Motion Starting Velocity | The Maneuvering Turning Rate | The Sampling Period of Radar R1 | The Sampling Period of Radar R2 | The Number of Targets |
|---|---|---|---|---|---|---|
| 30 s | 0~2π rad | 100~300 m/s | 0.05~0.5 | 4 s | 5 s | 10:1:50 |
| The Processing Period of the FC | The Motion Starting Direction | The motion starting velocity | The Maneuvering Turning Rate | The Sampling Period of Radar R1 | The Sampling Period of Radar R2 | The Number of Targets |
|---|---|---|---|---|---|---|
| 20:2:50 s | 0~2π rad | 100~300 m/s | 0.05~0.5 | 4 s | 5 s | 20 |
| Target Number | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
|---|---|---|---|---|---|---|---|---|---|---|
| KNN | 18.18% | 0.00% | 0.00% | 0.00% | 13.33% | 12.50% | 11.76% | 0.00% | 0.00% | 10.00% |
| PND | 0.00% | 0.00% | 15.38% | 14.29% | 13.33% | 12.50% | 11.76% | 11.11% | 10.53% | 10.00% |
| Target number | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 |
| KNN | 9.52% | 9.09% | 8.70% | 8.33% | 16.00% | 7.69% | 85.19% | 7.14% | 0.00% | 6.67% |
| PND | 9.52% | 9.09% | 8.70% | 8.33% | 8.00% | 7.69% | 11.11% | 7.14% | 6.90% | 6.67% |
| Target number | 31 | 32 | 33 | 34 | 35 | 36 | 37 | 38 | 39 | 40 |
| KNN | 6.45% | 6.25% | 78.79% | 11.76% | 5.71% | 11.11% | 10.81% | 52.63% | 5.13% | 5.00% |
| PND | 0.00% | 6.25% | 9.09% | 11.76% | 5.71% | 5.56% | 5.41% | 5.26% | 10.26% | 10.00% |
| Target number | 41 | 42 | 43 | 44 | 45 | 46 | 47 | 48 | 49 | 50 |
| KNN | 9.76% | 4.76% | 4.65% | 95.45% | 8.89% | 95.65% | 8.51% | 83.33% | 89.80% | 8.00% |
| PND | 9.76% | 9.52% | 4.65% | 9.09% | 13.33% | 8.70% | 4.26% | 8.33% | 8.16% | 12.00% |
| Processing Period/S | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 |
|---|---|---|---|---|---|---|---|---|---|---|
| KNN | 9.52% | 9.09% | 8.70% | 8.33% | 8.00% | 7.69% | 48.15% | 7.14% | 13.79% | 66.67% |
| PND | 9.52% | 18.18% | 8.70% | 8.33% | 8.00% | 7.69% | 7.41% | 7.14% | 13.79% | 6.67% |
| Processing period/S | 31 | 32 | 33 | 34 | 35 | 36 | 37 | 38 | 39 | 40 |
| KNN | 6.45% | 6.25% | 6.06% | 5.88% | 5.71% | 5.56% | 5.41% | 5.26% | 51.28% | 0.00% |
| PND | 6.45% | 6.25% | 6.06% | 5.88% | 5.71% | 5.56% | 5.41% | 5.26% | 5.13% | 5.00% |
| Processing period/S | 41 | 42 | 43 | 44 | 45 | 46 | 47 | 48 | 49 | 50 |
| KNN | 4.88% | 4.76% | 4.65% | 4.55% | 6.67% | 43.48% | 4.26% | 4.17% | 4.08% | 4.00% |
| PND | 4.88% | 4.76% | 4.65% | 4.55% | 4.44% | 4.35% | 4.26% | 6.25% | 4.08% | 4.00% |
| Algorithm Type | SD-IRS | PND |
|---|---|---|
| Multiplication operation amount | 2 mn2 + mn | 6 mn2 + mn |
| Amount of addition operations | 4 mn2 − mn | 6 mn2 − mn |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Zhang, H.; Ma, J.; Xie, H. Asynchronous Track-to-Track Association Based on Pseudo Nearest Neighbor Distance for Distributed Networked Radar System. Electronics 2023, 12, 1794. https://doi.org/10.3390/electronics12081794
Chen S, Zhang H, Ma J, Xie H. Asynchronous Track-to-Track Association Based on Pseudo Nearest Neighbor Distance for Distributed Networked Radar System. Electronics. 2023; 12(8):1794. https://doi.org/10.3390/electronics12081794
Chicago/Turabian StyleChen, Shuangyou, Hongwei Zhang, Juntao Ma, and Hui Xie. 2023. "Asynchronous Track-to-Track Association Based on Pseudo Nearest Neighbor Distance for Distributed Networked Radar System" Electronics 12, no. 8: 1794. https://doi.org/10.3390/electronics12081794
APA StyleChen, S., Zhang, H., Ma, J., & Xie, H. (2023). Asynchronous Track-to-Track Association Based on Pseudo Nearest Neighbor Distance for Distributed Networked Radar System. Electronics, 12(8), 1794. https://doi.org/10.3390/electronics12081794