
Stability Study of an Interventional Surgery Robot Based on Active Disturbance Rejection Control


Abstract
1. Introduction
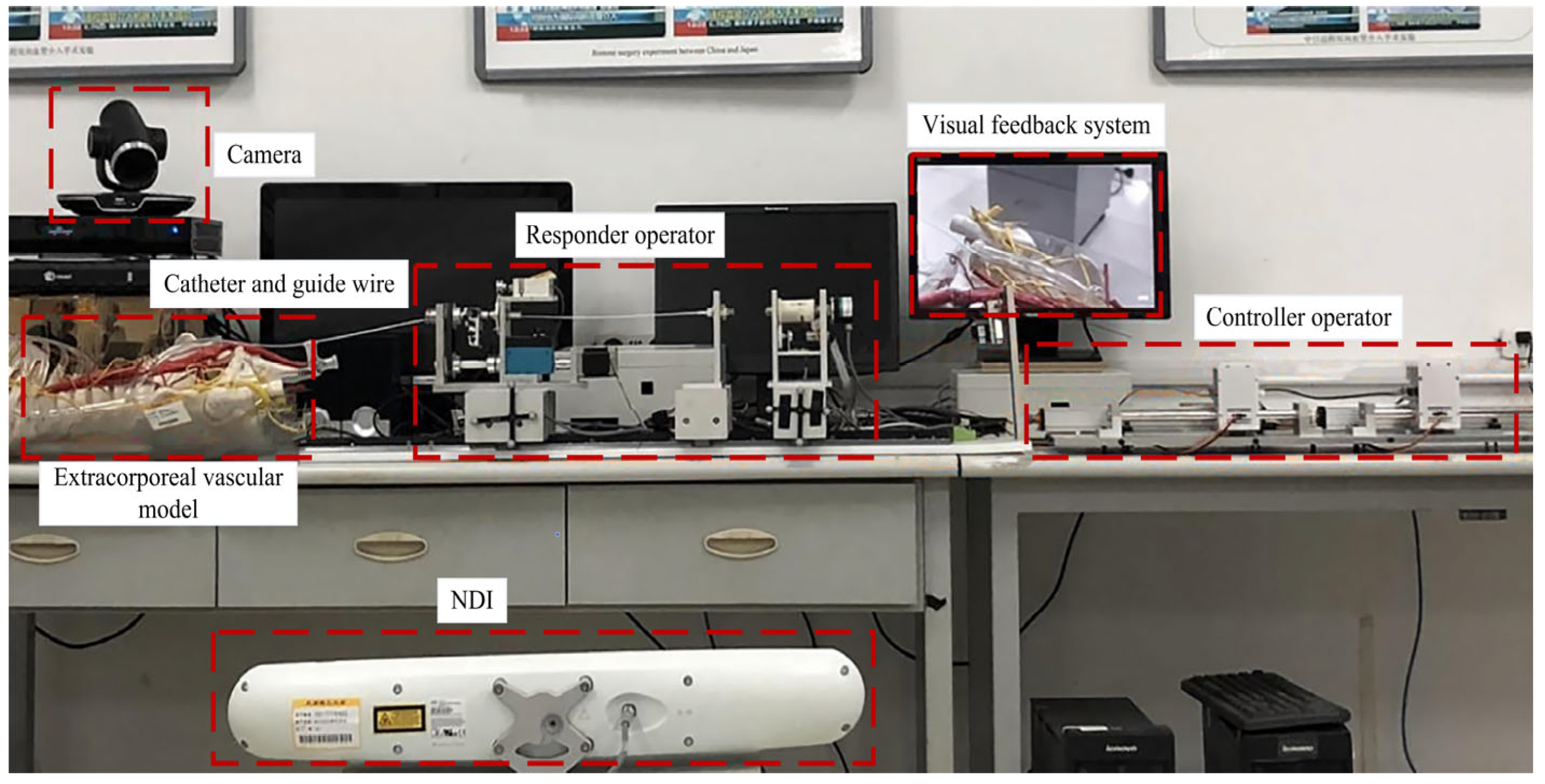
2. Equipment
3. Methodology
3.1. Extended State Observer Design
- Step 1
- Determine the structure of the RBF neural network and initialize the relevant parameters.
- Step 2
- Sample the system input signal and output signal and analyze the error; if the deviation meets the neural network performance index, go to step 4; otherwise, go to step 3.
- Step 3
- Correct of each weight parameter of the RBF neural network (output weights, node center vectors, and basewidth parameters).
- Step 4
- Calculate Jacobian information.
- Step 5
- Adjust the ESO parameters using the gradient descent method to output the optimal controller parameters.
- Step 6
- Repeat steps 2–6 until the system has an optimal solution.
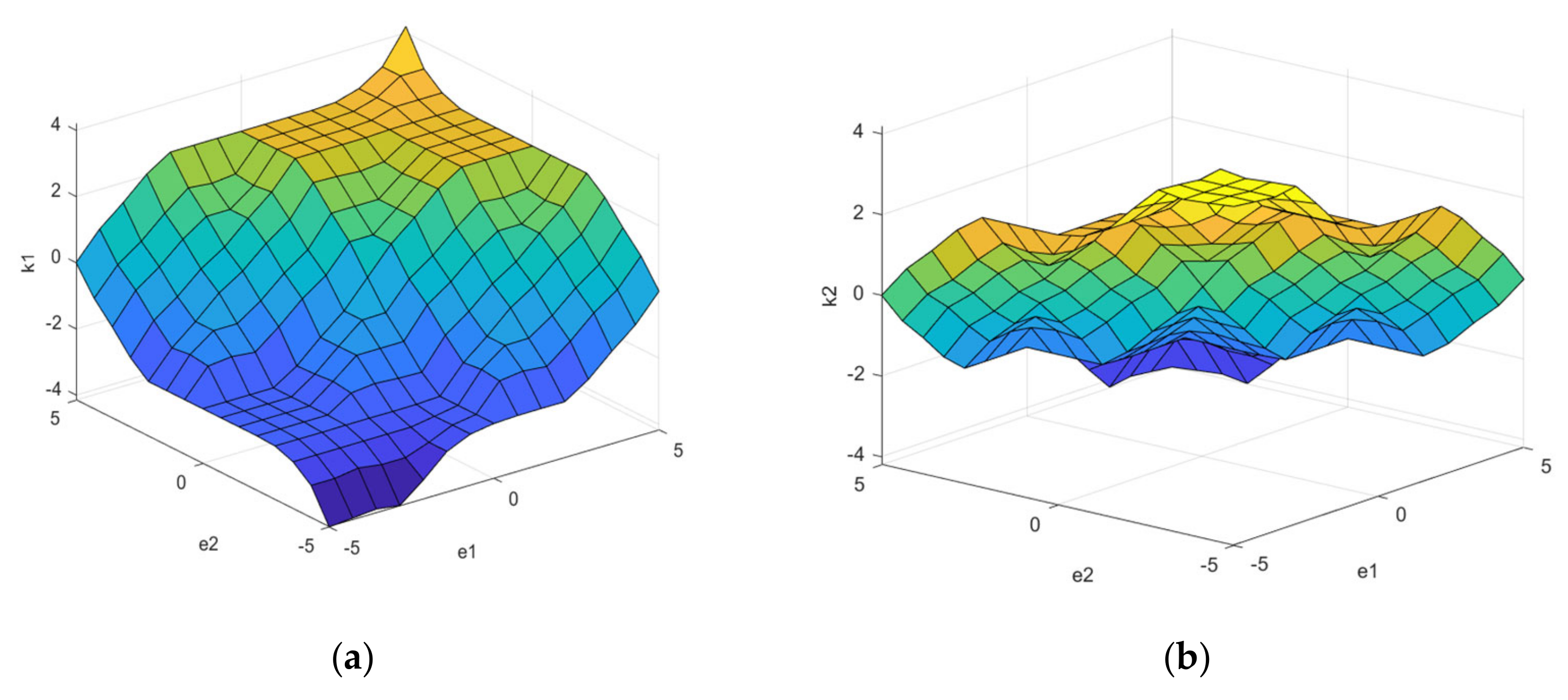
3.2. Nonlinear State Error Feedback Design
3.3. Tracking Differentiator Design
4. Results
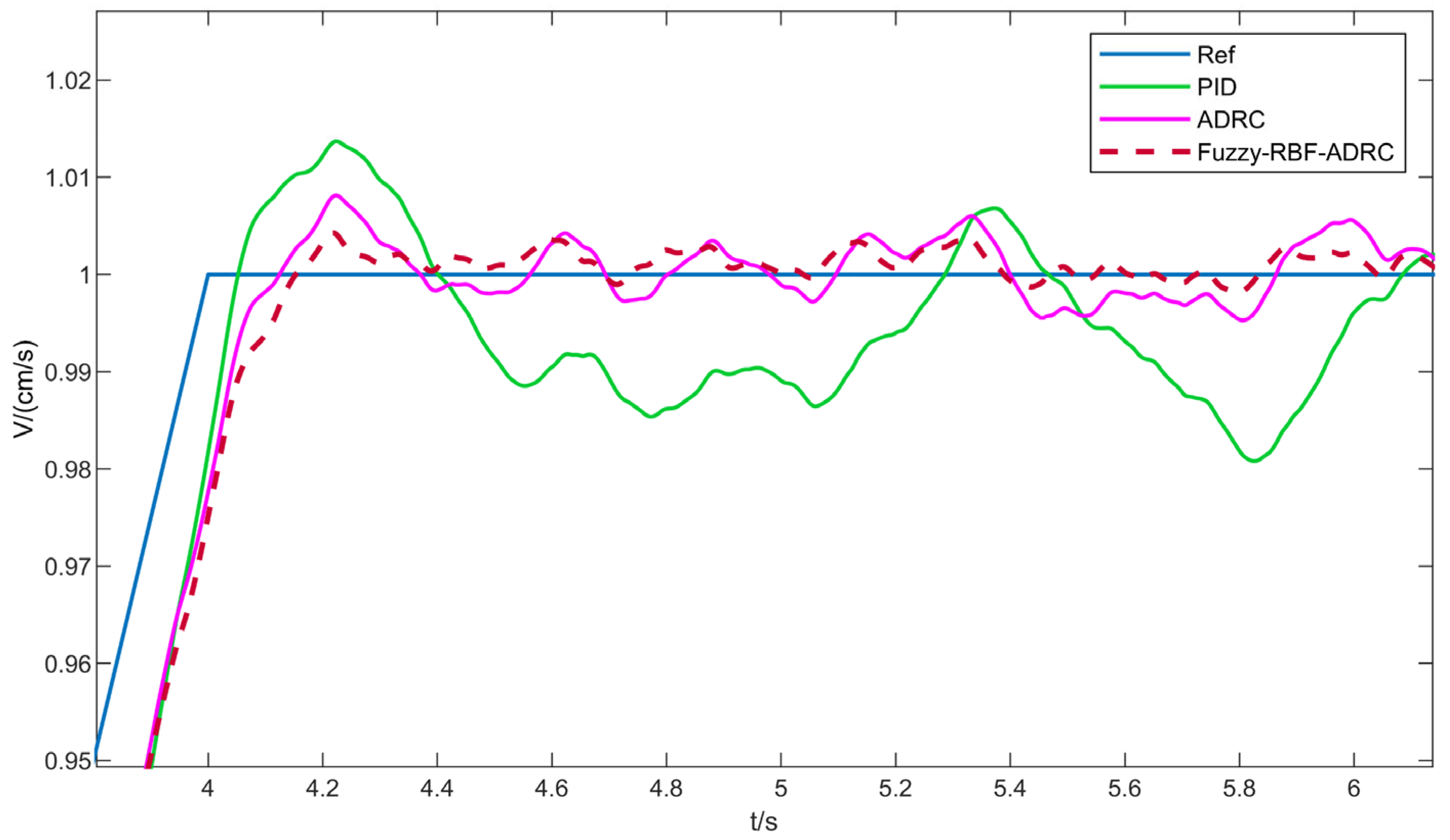
4.1. Performance Analysis of Guidewire Tracking from the End Surgical Robot
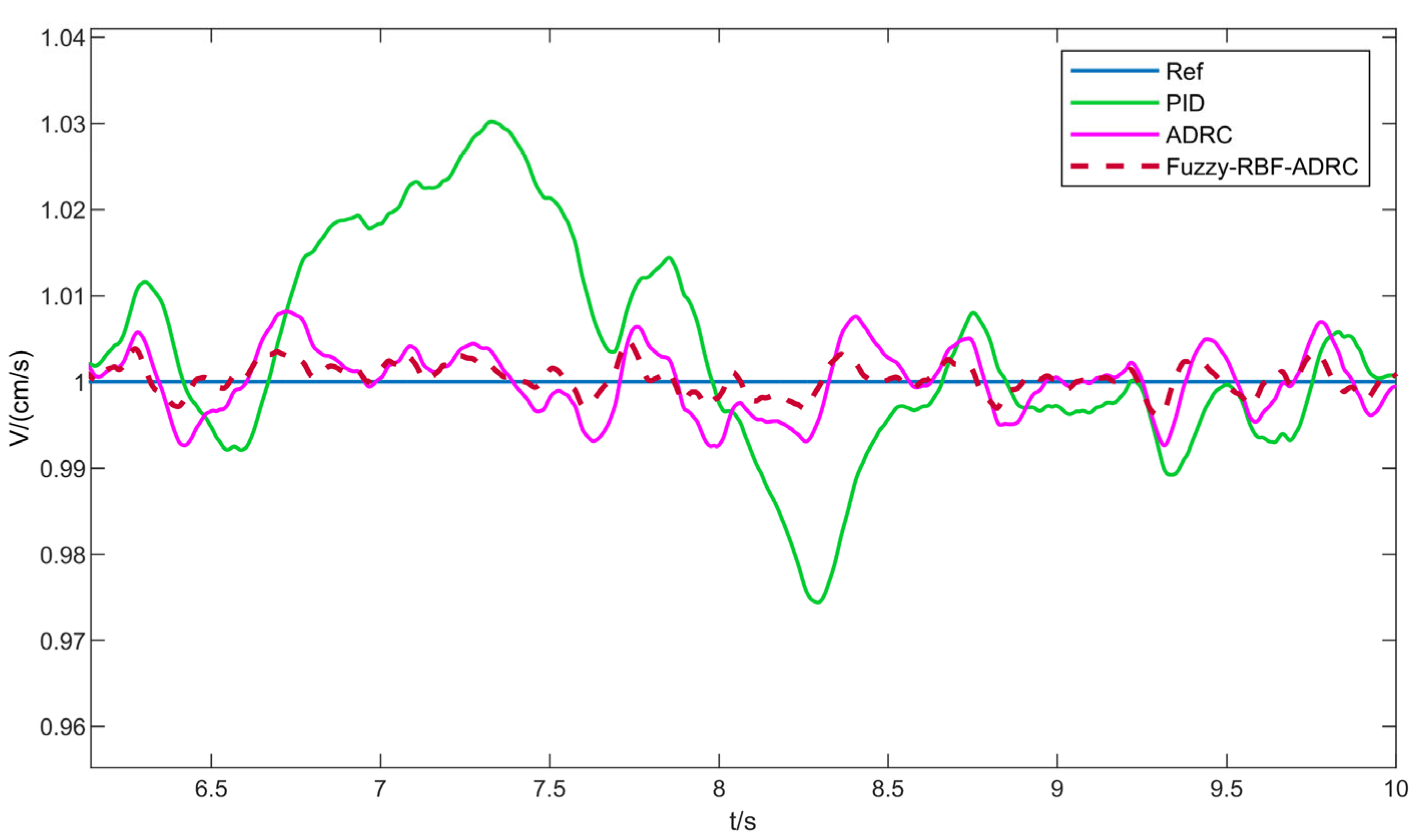
4.2. Static Disturbance and Disturbance Immunity Analysis
4.3. Dynamic Disturbance and Stability Analysis
4.4. Tests
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, L.; Wang, Z.; Fan, J.; Hu, S.S. Summary of the Chinese Cardiovascular Health and Disease Report 2021. Chin. J. Interv. Cardiol. 2022, 30, 481–496. [Google Scholar] [CrossRef]
- Linet, M.S.; Kim, K.P.; Miller, D.L.; Kleinerman, R.A.; Simon, S.L.; De Gonzalez, A.B. Historical review of occupational exposures and cancer risks in medical radiation workers. Radiat. Res. 2010, 174, 793–808. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Guo, S.; Shao, L.; Wang, P.; Gao, Q. Design and performance evaluation of a novel robotic catheter system for vascular interventional surgery. Microsyst. Technol. 2016, 22, 2167–2176. [Google Scholar] [CrossRef]
- Zhao, H.; Xie, X.; Feng, Z.; Liu, S.; Zhou, X.H. Review of vascular interventional surgery robot system. China Med. Devices 2020, 35, 11–16. [Google Scholar] [CrossRef]
- Zhao, Y.; Mei, Z.; Luo, X.; Mao, J.; Zhao, Q.; Liu, G.; Wu, D. Remote vascular interventional surgery robotics: A literature review. Quant. Imaging Med. Surg. 2022, 12, 2552. [Google Scholar] [CrossRef]
- Rafii-Tari, H.; Payne, C.J.; Yang, G.Z. Current and Emerging Robot-Assisted Endovascular Catheterization Technologies: A Review. Ann. Biomed. Eng. 2014, 42, 697–715. [Google Scholar] [CrossRef]
- Li, A.; Li, J.; Li, J.; Zhang, T.; Yang, R.; Xing, Y.; Liu, Q.; Wang, S.X. Experimental study on remote operation of Chinese robot miaohan-s system. Abdom. Surg. 2016, 29, 473–477. [Google Scholar] [CrossRef]
- Zhang, W. Master Hand Design and Master-Slave Control of Vascular Interventional Surgical Robot. Master’s Thesis, Yanshan University, Qinhuangdao, China, 2015. [Google Scholar]
- Au, S.; Ko, K.; Tsang, J.; Chan, Y.C. Robotic endovascular surgery. Asian Cardiovasc. Thorac. Ann. 2014, 22, 110–114. [Google Scholar] [CrossRef]
- Zhao, Y.; Guo, S.; Wang, Y.; Cui, J.; Ma, Y.; Zeng, Y.; Liu, X.; Jiang, Y.; Li, Y.; Shi, L.; et al. A CNN-based prototype method of unstructured surgical state perception and navigation for an endovascular surgery robot. Med. Biol. Eng. Comput. 2019, 57, 1875–1887. [Google Scholar] [CrossRef]
- Han, J.Q. Active Disturbance Rejection Control Technology: Control Technology for Estimating Compensation Uncertainty Factors; National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Yu, X.N.; Zhu, L.L. Dynamic parameter setting and application of active disturbance rejection controller. J. N. China Electr. Power Univ. 2005, 32, 9–13. [Google Scholar] [CrossRef]
- Li, S.; Zhang, S.; Liu, Y.; Zhou, S.W. Tuning Parameters of Active Disturbance Rejection Controller Based on System Time Scale. Control. Theory Appl. 2012, 29, 125–129. [Google Scholar]
- Wu, L.; Bao, H.; Du, J.; Wang, C.S. An Active Disturbance Rejection Controller Parameter Learning Algorithm. Acta Autom. Sin. 2014, 40, 556–560. [Google Scholar] [CrossRef]
- Bao, X.; Guo, S.; Xiao, N.; Li, Y.; Yang, C.; Shen, R.; Cui, J.; Jiang, Y.; Liu, X.; Liu, K. Operation evaluation in-human of a novel remote-controlled vascular interventional robot. Biomed. Microdevices 2018, 20, 34. [Google Scholar] [CrossRef] [PubMed]
- Srimathveeravalli, G.; Kesavadas, T.; Li, X. Design and fabrication of a robotic mechanism for remote steering and positioning of interventional devices. Int. J. Med. Robot. Comput. Assist. Surg. 2010, 6, 160–170. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Guo, S.; Xiao, N.; Li, Y.; Jiang, Y. Surgeons’ operation skill-based control strategy and preliminary evaluation for a vascular interventional surgical robot. J. Med. Biol. Eng. 2019, 39, 653–664. [Google Scholar] [CrossRef]
- Guo, J.; Guo, S.; Yu, Y. Design and characteristics evaluation of a novel teleoperated robotic catheterization system with force feedback for vascular interventional surgery. Biomed. Microdevices 2016, 18, 76. [Google Scholar] [CrossRef]
- Guo, S.; Wang, Y.; Xiao, N.; Li, Y.; Jiang, Y. Study on real-time force feedback for a master–slave interventional surgical robotic system. Biomed. Microdevices 2018, 20, 37. [Google Scholar] [CrossRef]
- Han, J.Q. Active disturbance rejection controller and its application. Control. Decis. 1998, 1, 19–23. [Google Scholar] [CrossRef]
- Gao, Z.Q. Research on Active Disturbance Rejection Control. Control. Theory Appl. 2013, 30, 1498–1510. [Google Scholar]
- Li, X.; Guo, S.; Shi, P.; Jin, X.; Kawanishi, M. An Endovascular Catheterization Robotic System Using Collaborative Operation with Magnetically Controlled Haptic Force Feedback. Micromachines 2022, 13, 505. [Google Scholar] [CrossRef]
- Li, J.; Qi, X.; Xia, Y.; Gao, Z.Q. Linear/Nonlinear Active Disturbance rejection Switching control. Acta Autom. Sin. 2016, 2, 202–212. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, T. An active disturbance rejection control for hysteresis compensation based on neural networks adaptive control. ISA Trans. 2021, 109, 81–88. [Google Scholar] [CrossRef]
- Li, X.; Wang, J. Fuzzy active disturbance rejection control design for autonomous underwater vehicle manipulators system. Adv. Control. Appl. Eng. Ind. Syst. 2021, 3, e44. [Google Scholar] [CrossRef]
- Fan, X.Y. Active Disturbance Rejection Control of Unmanned Surface Craft Based on RBF Neural Network. Master’s Thesis, Dalian Maritime University, Dalian, China, 2019. [Google Scholar]
- Kong, B.; Pazilat, M.; Wang, J.J. Active Front Wheel Steering Active Disturbance Rejection Control Based on Radial Basis Function Neural Network. Sci. Technol. Eng. 2021, 21, 11813–11819. [Google Scholar] [CrossRef]
- Tang, C. Research on Load Disturbance Suppression of a Multiple Rocket Launcher Based on RBF Parameter Setting. Master’s Thesis, Nanjing University of Science and Technology, Nanjing, China, 2020. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 4989–4996. [Google Scholar]
- Sui, Y.; Li, X.; Li, X.; Liu, H.; Wang, Y.Q. Motion of precision linear Motor based on fuzzy active disturbance rejection. Electr. Mach. Control. Appl. 2020, 47, 6–11. [Google Scholar] [CrossRef]
- Premkumar, K.; Manikandan, B.V. Adaptive Neuro-Fuzzy Inference System based speed controller for brushless DC motor. Neurocomputing 2014, 138, 260–270. [Google Scholar] [CrossRef]
- He, J.; Xiao, J.; Ni, L.; Yu, W.; Yang, C.; Zheng, G.Y. Auto disturbance rejection control of high precision motor based on Fuzzy Neural Network. Missiles Guid. 2020, 40, 10–14. [Google Scholar] [CrossRef]
- Duan, H.D. Research on Cascaded Active Disturbance Rejection Control Strategy for a Class of Uncertain High-order Nonlinear Systems. Ph.D. Thesis, Jilin University, Jilin, China, 2012. [Google Scholar]
- Ma, X.; Guo, S.; Xiao, N.; Guo, J.; Yoshida, S.; Tamiya, T.; Kawanishi, M. Development of a Novel Robotic Catheter Manipulating System with Fuzzy PID Control. Int. J. Intell. Mechatronics Robot. 2012, 2, 58–77. [Google Scholar] [CrossRef]
- Ma, X.; Zhou, J.; Zhang, X.; Qi, Y.; Huang, X. Design of a New Catheter Operating System for the Surgical Robot. Appl. Bionics Biomech. 2021, 2021, 8898311. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NS | Z0 | PS | PB | ||
|---|---|---|---|---|---|---|
| NB | NB/PB | NS/PS | NS/PS | NS/PS | Z0/Z0 | |
| NS | NB/PB | NS/PS | NS/PS | Z0/Z0 | PS/NS | |
| Z0 | NS/PS | NS/PS | Z0/Z0 | PS/NS | PS/NS | |
| PS | NS/PS | Z0/Z0 | PS/NS | PS/NS | PS/NS | |
| PB | Z0/Z0 | PS/NS | PS/NS | PS/NS | PB/NB | |
| NB | NB/PB | NS/PS | NS/PS | NS/PS | Z0/Z0 | |
| Projects | PID | ADRC | Fuzzy-RBF-ADRC |
|---|---|---|---|
| 21.9% | 3.8% | 1.1% | |
| T/s | 0.141 | 0.324 | 0.386 |
| /s | 2.5 | 1.399 | 0.617 |
| Projects | PID | ADRC | Fuzzy-RBF-ADRC |
|---|---|---|---|
| 3.6% | 0.8% | 0.3% | |
| /s | 2.5 | 1.279 | 0.405 |
| Projects | PID | ADRC | Fuzzy-RBF-ADRC |
|---|---|---|---|
| 3.98% | 3.41% | 2.73% | |
| T/s | 0.05 | 0.13 | 0.20 |
| APD | 1.339% | 1.332% | 1.222% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Wen, Q. Stability Study of an Interventional Surgery Robot Based on Active Disturbance Rejection Control. Electronics 2023, 12, 2115. https://doi.org/10.3390/electronics12092115
Ma X, Wen Q. Stability Study of an Interventional Surgery Robot Based on Active Disturbance Rejection Control. Electronics. 2023; 12(9):2115. https://doi.org/10.3390/electronics12092115
Chicago/Turabian StyleMa, Xu, and Quan Wen. 2023. "Stability Study of an Interventional Surgery Robot Based on Active Disturbance Rejection Control" Electronics 12, no. 9: 2115. https://doi.org/10.3390/electronics12092115
APA StyleMa, X., & Wen, Q. (2023). Stability Study of an Interventional Surgery Robot Based on Active Disturbance Rejection Control. Electronics, 12(9), 2115. https://doi.org/10.3390/electronics12092115