

Decentralized Virtual Impedance Control for Power Sharing and Voltage Regulation in Islanded Mode with Minimized Circulating Current

 , ,
, ,  and
and
Abstract
:1. Introduction
- Droop control tends to have a trade-off with load sharing accuracy, where frequency and voltage variations are reinstated proportional to P and Q in the input generation from the DG.
- A dynamic response of power sharing is dependent on droop coefficients and the method of power calculation. Moreover, the application of droop control is restricted by the addition of low-pass filters.
- A reduction in a seamless transfer when the microgrid returns to the grid-connected mode is another limitation of droop control because voltage restoration is needed to compensate for the f and v drop that droop control produces.
- Harmonic signal sharing is not supported by droop control, and hence the conventional droop control strategy is inappropriate for non-linear loads.
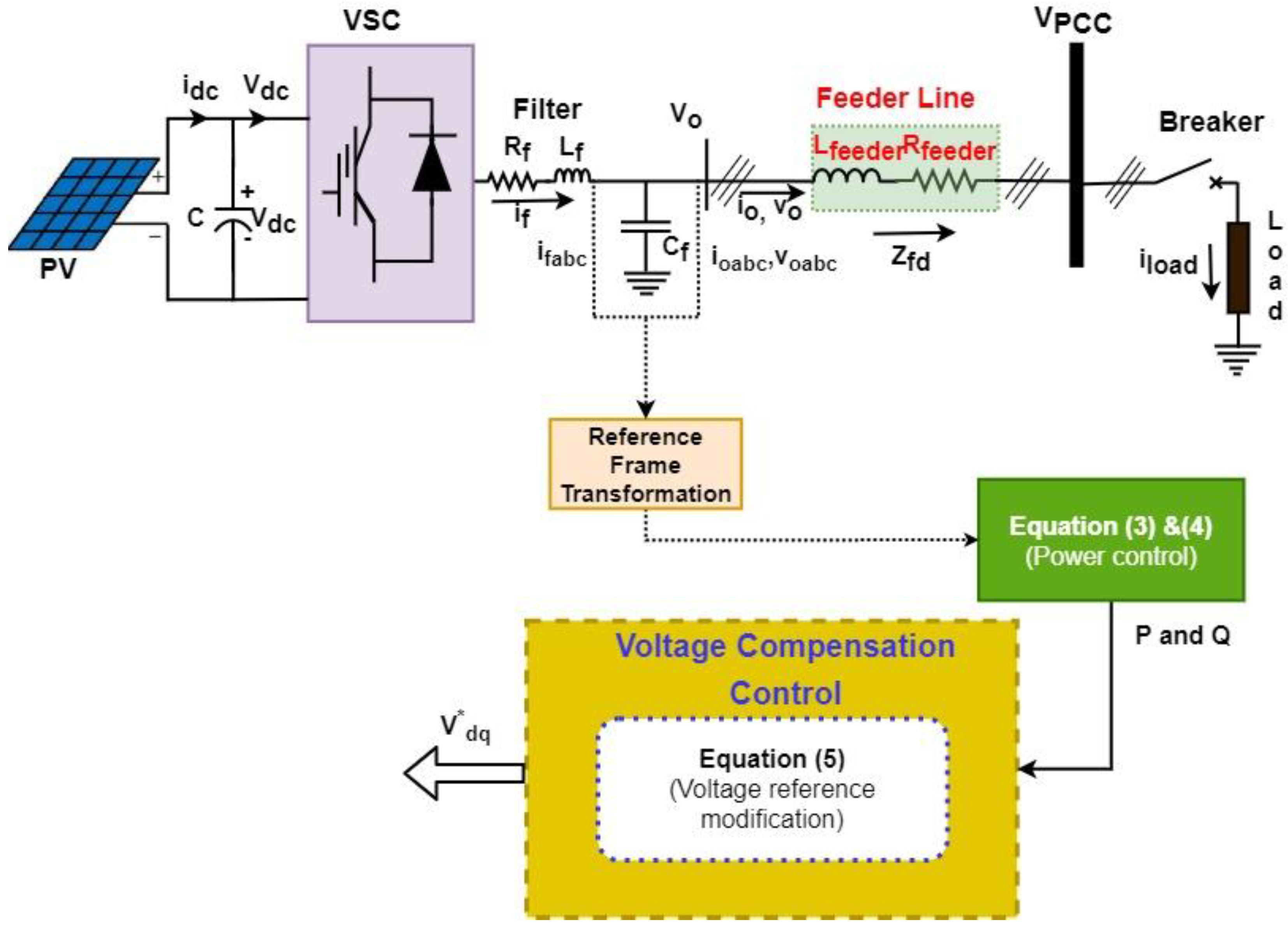
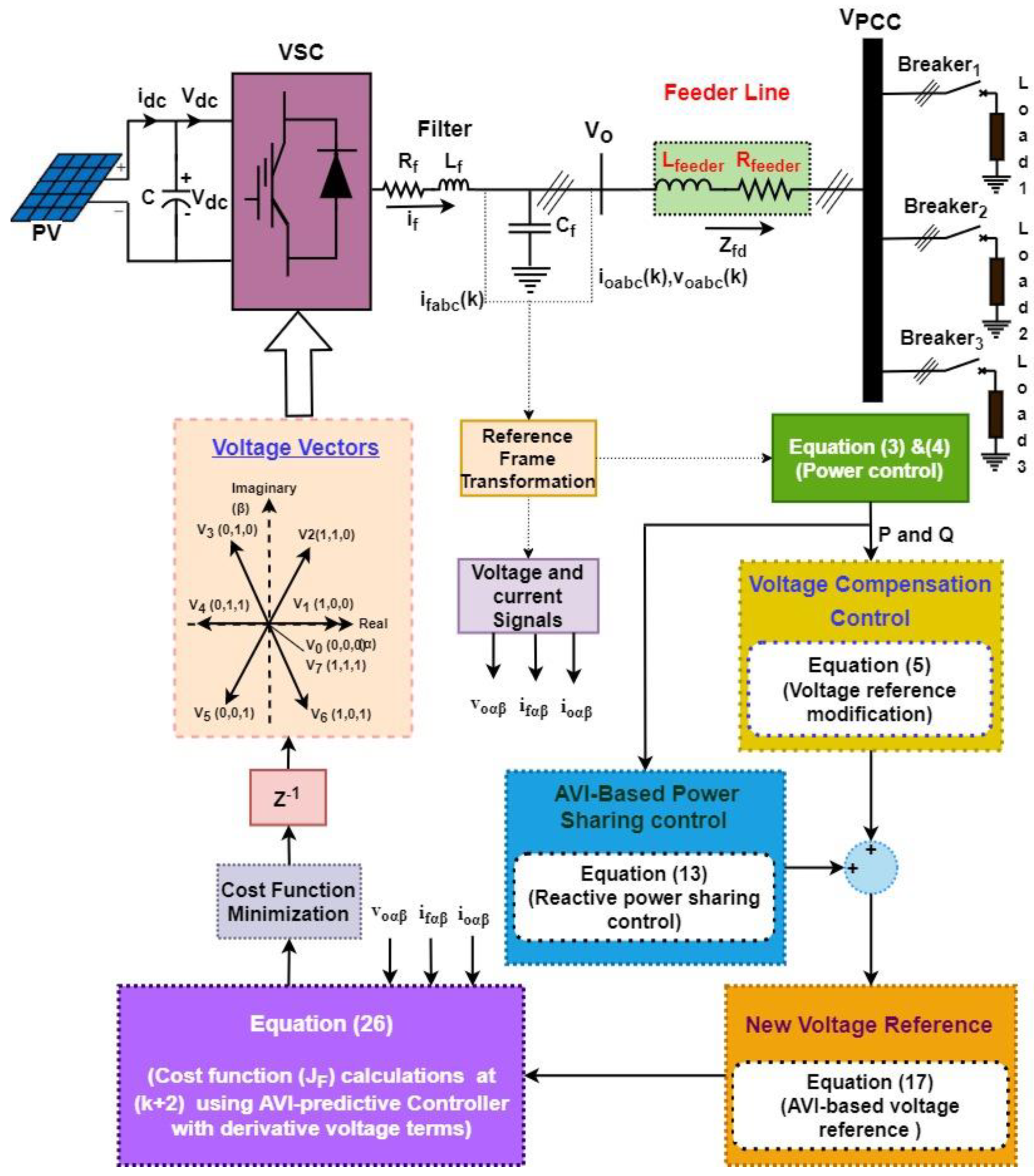
2. Proposed Control Scheme
2.1. Power Calculations
2.2. Reference Voltage Modification for AVI Input
2.3. Adaptive Virtual Impedance (AVI) Model
2.4. Inverter LC Filter
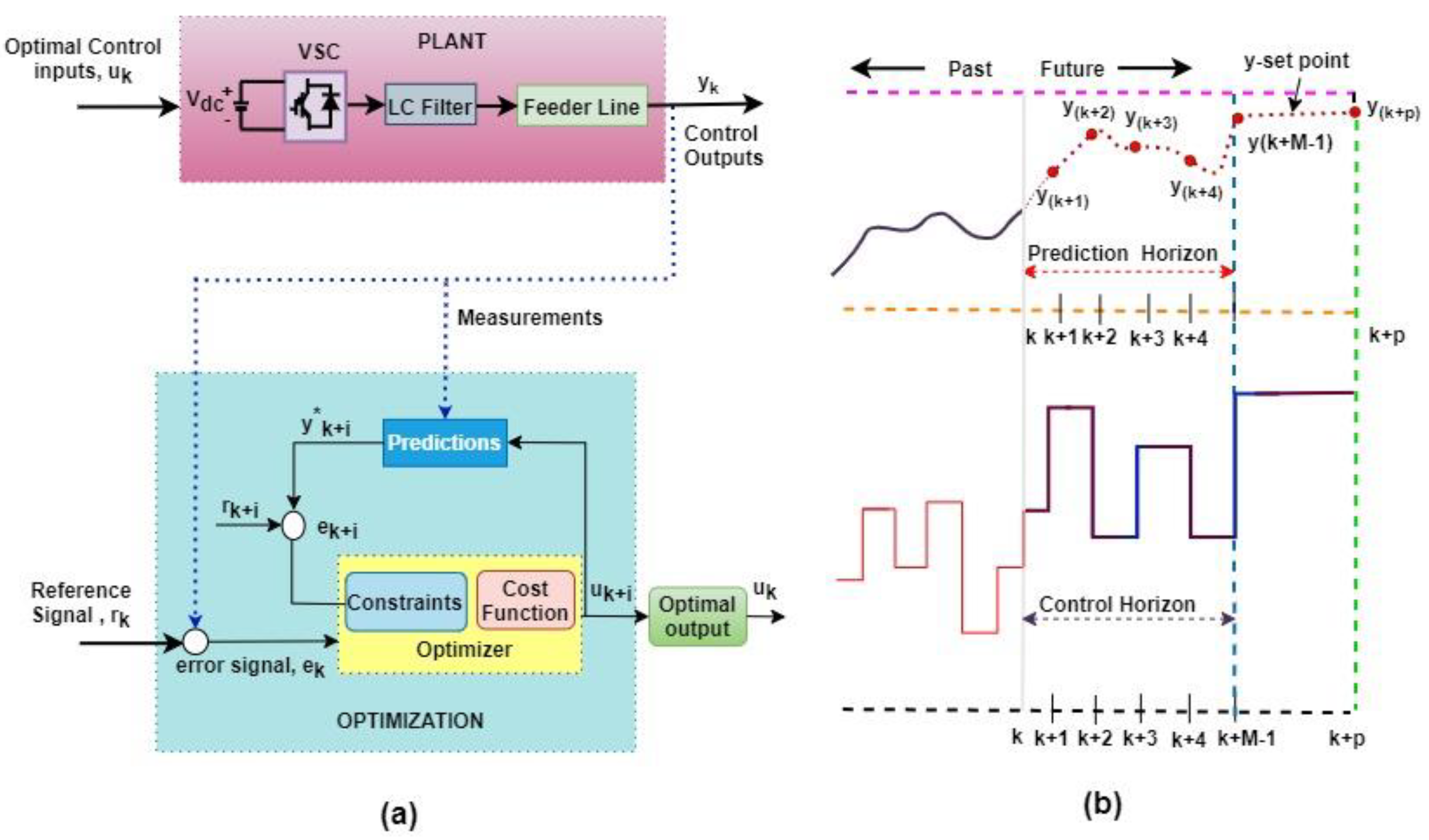
2.5. VSC Vector Switching with AVI FCS MPC Controller
3. CF Based on Adaptive Virtual Impedance
4. CF Optimization and Prediction Algorithms as Space-Vector Improvement
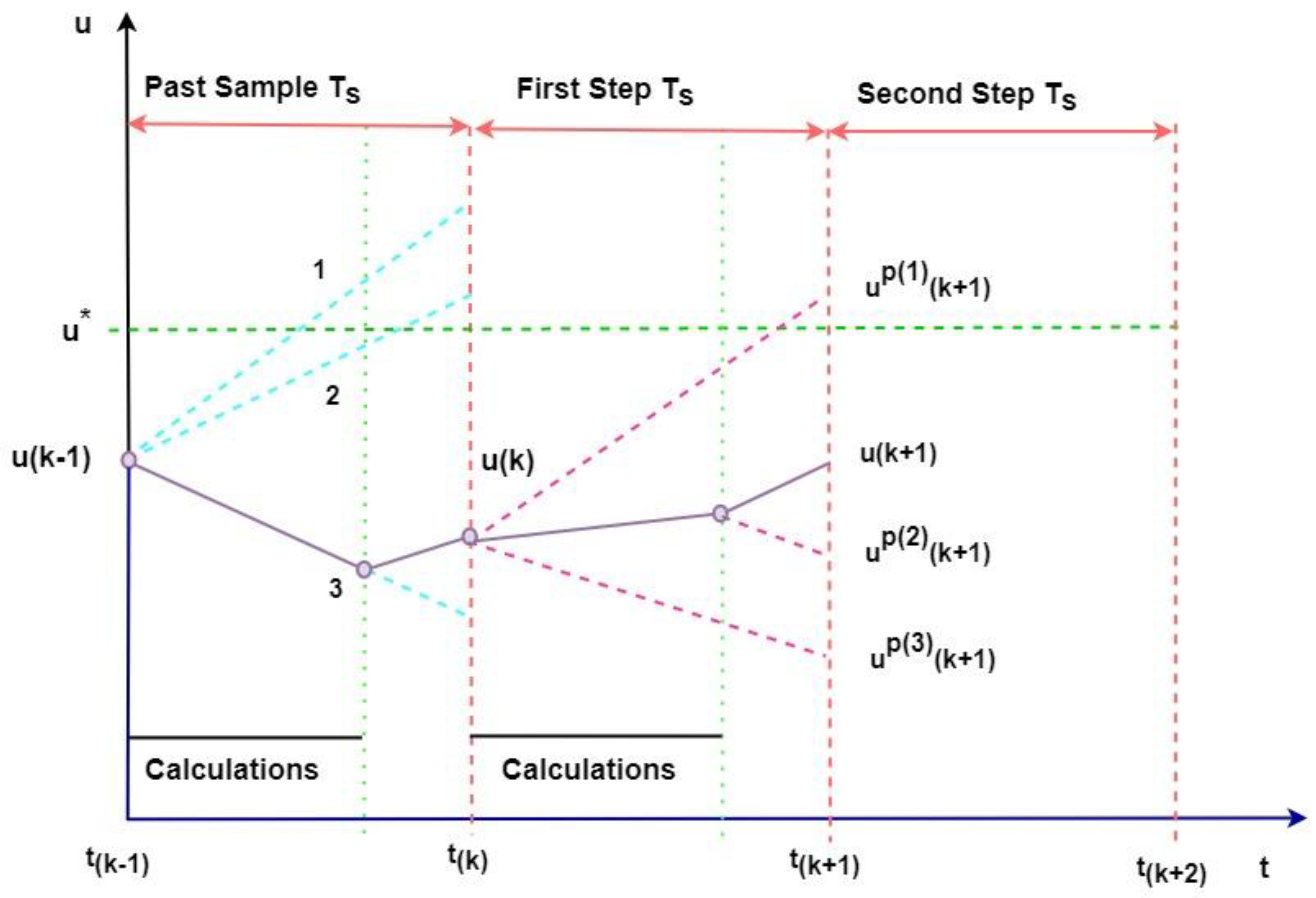
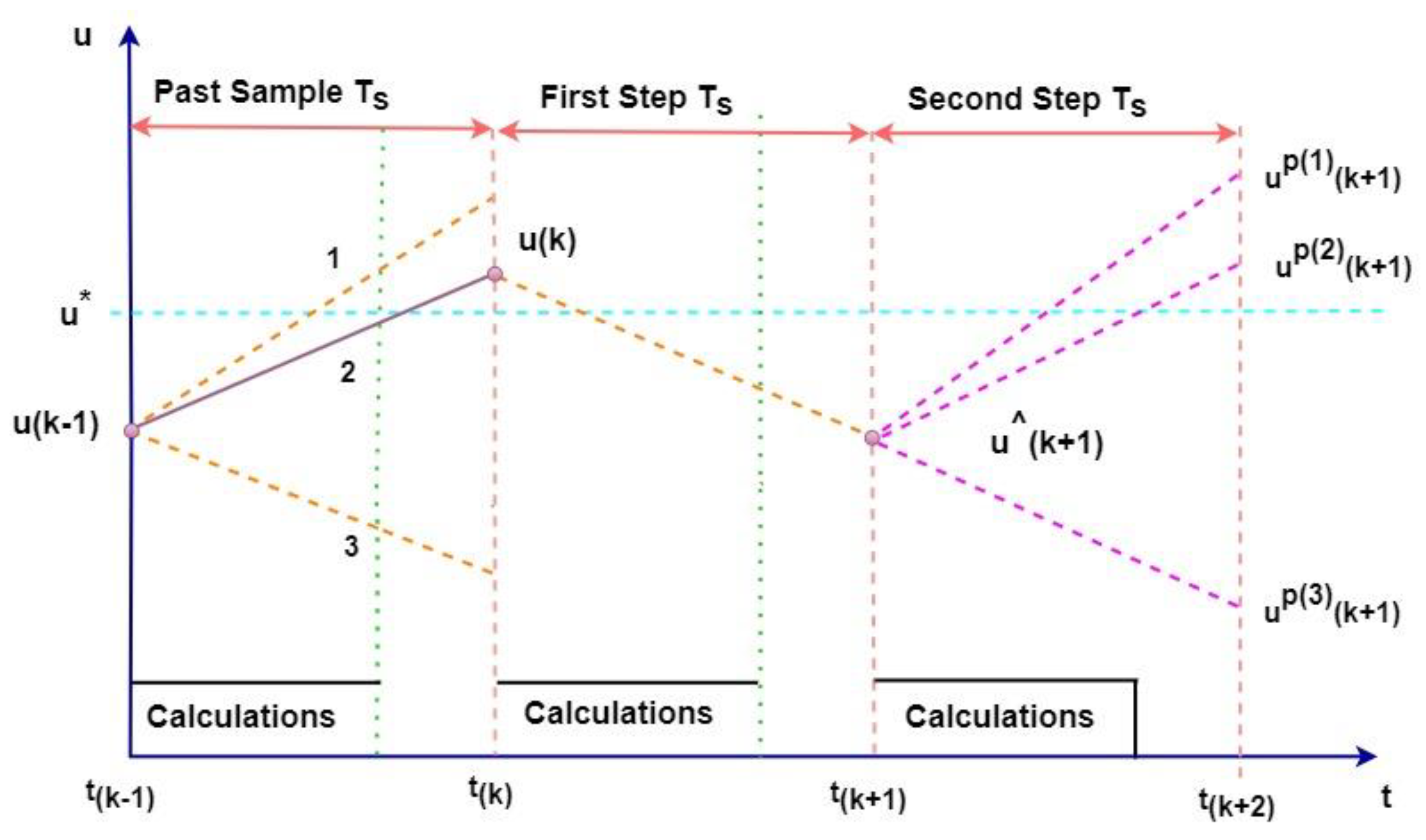
5. Computational Burden Reduction and Time Delay Compensation at MPC Time Step
6. Circulating Current Error Estimation Measurement
7. Results: Discussion and Comparison
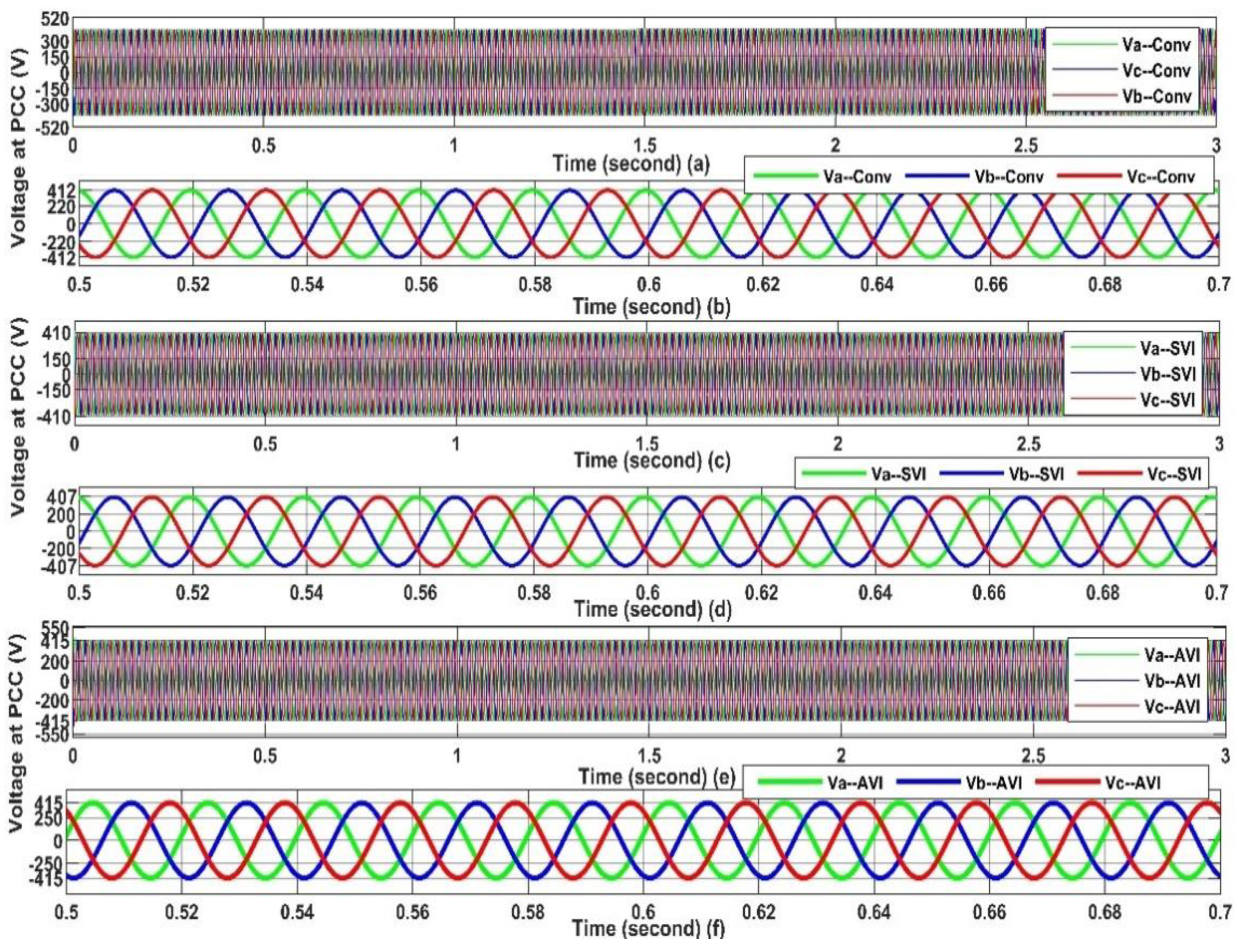
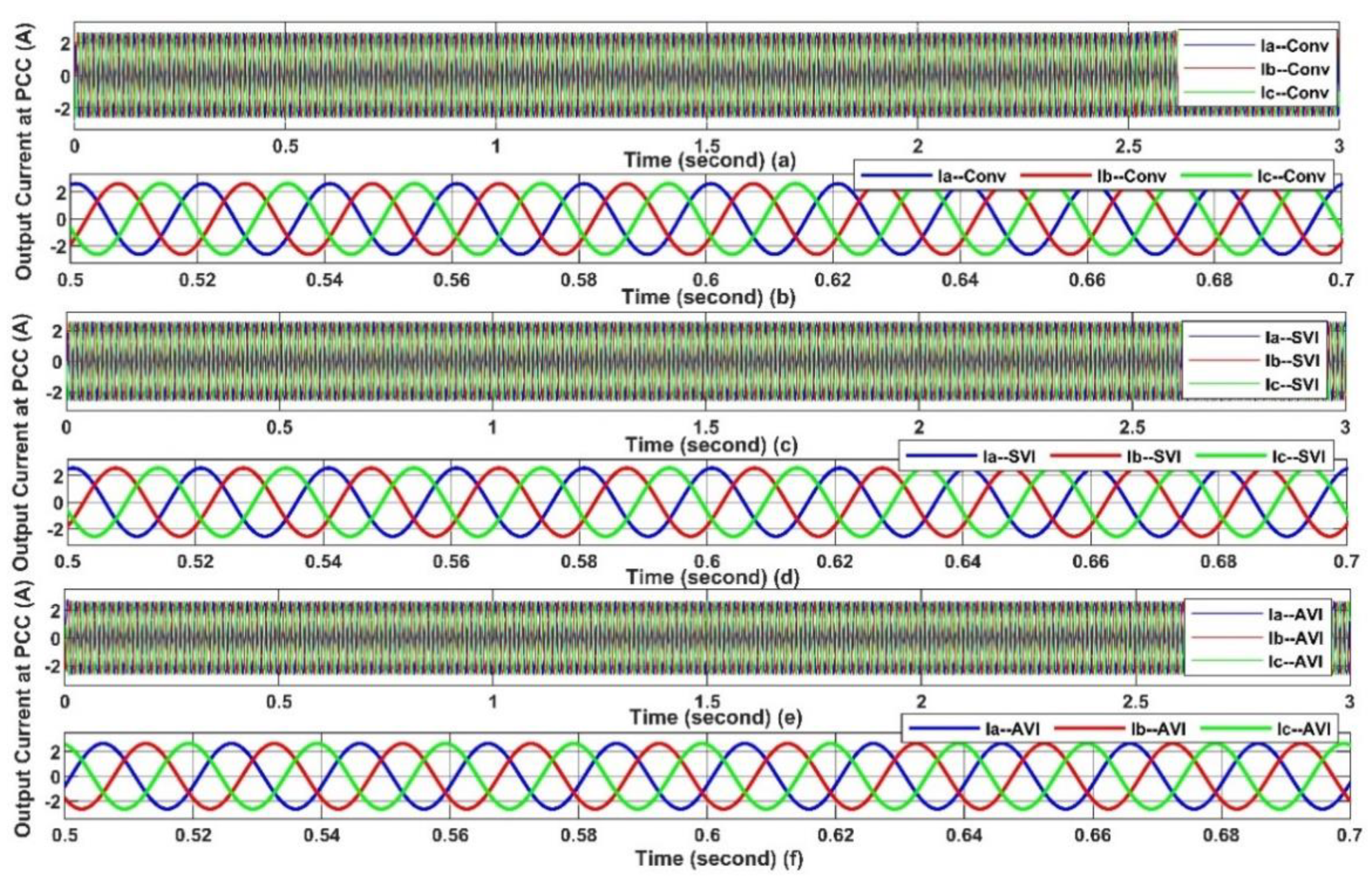
7.1. Comparison of Voltage and Current at PCC between Conventional, SVI-Based, and AVI-Based Controllers
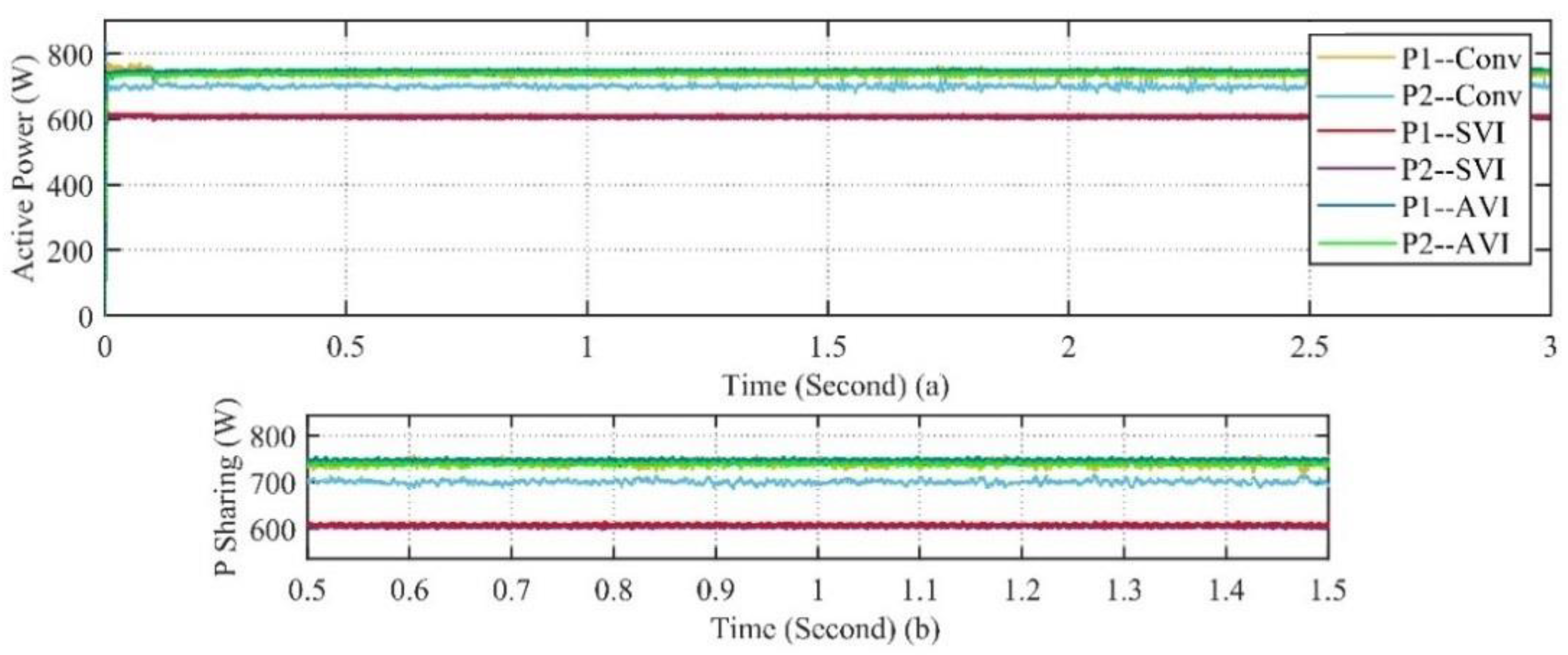
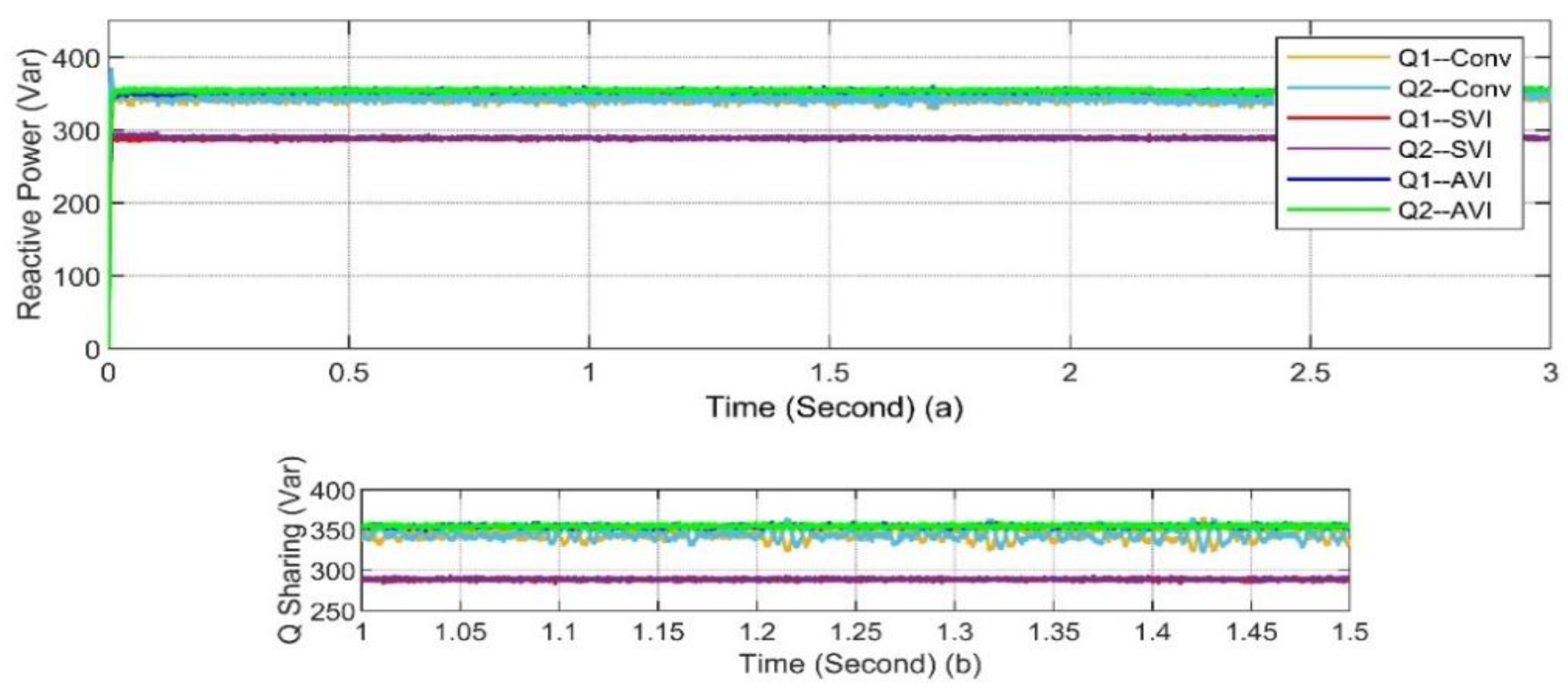
7.2. PCC Active and Reactive Power-Sharing Comparison
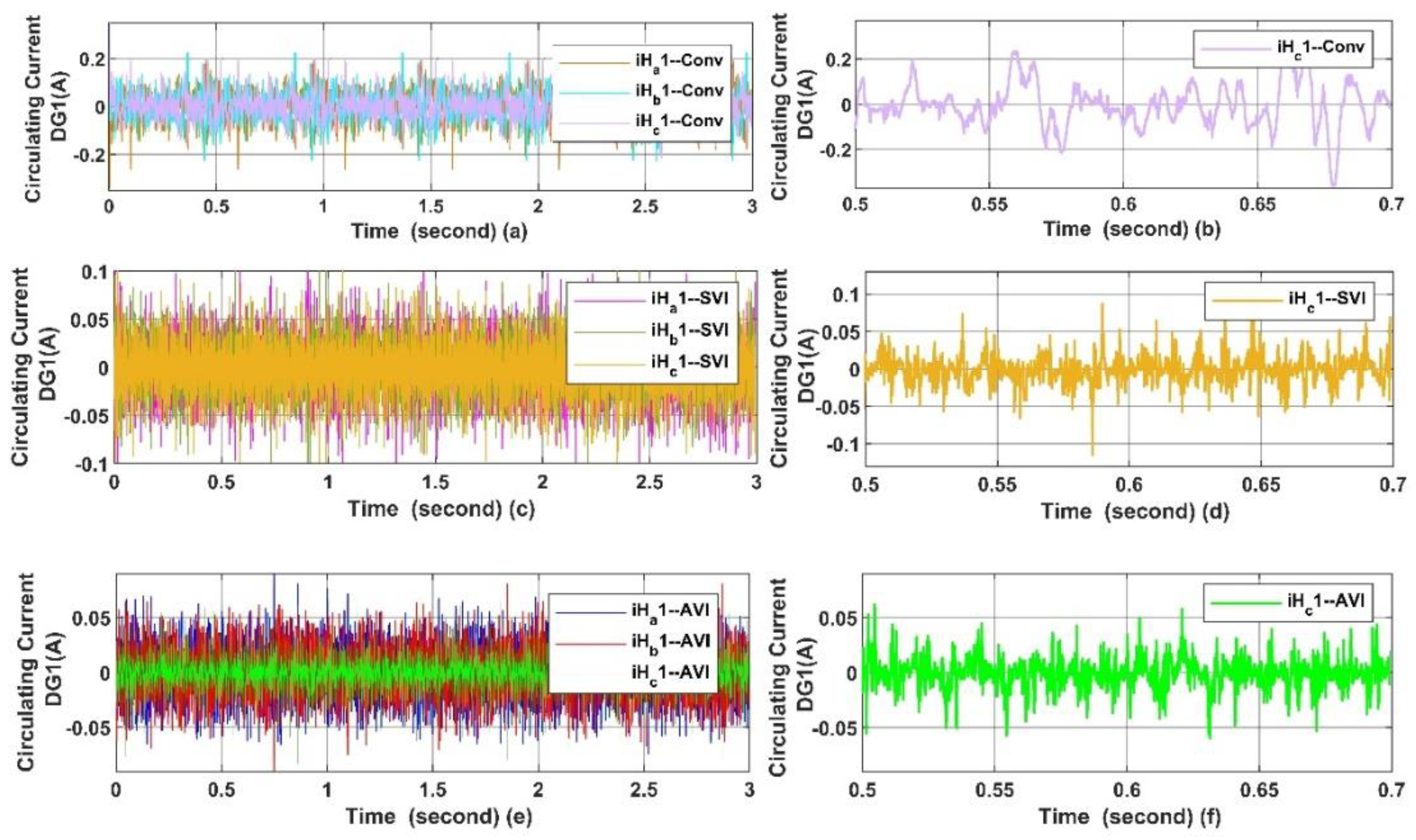
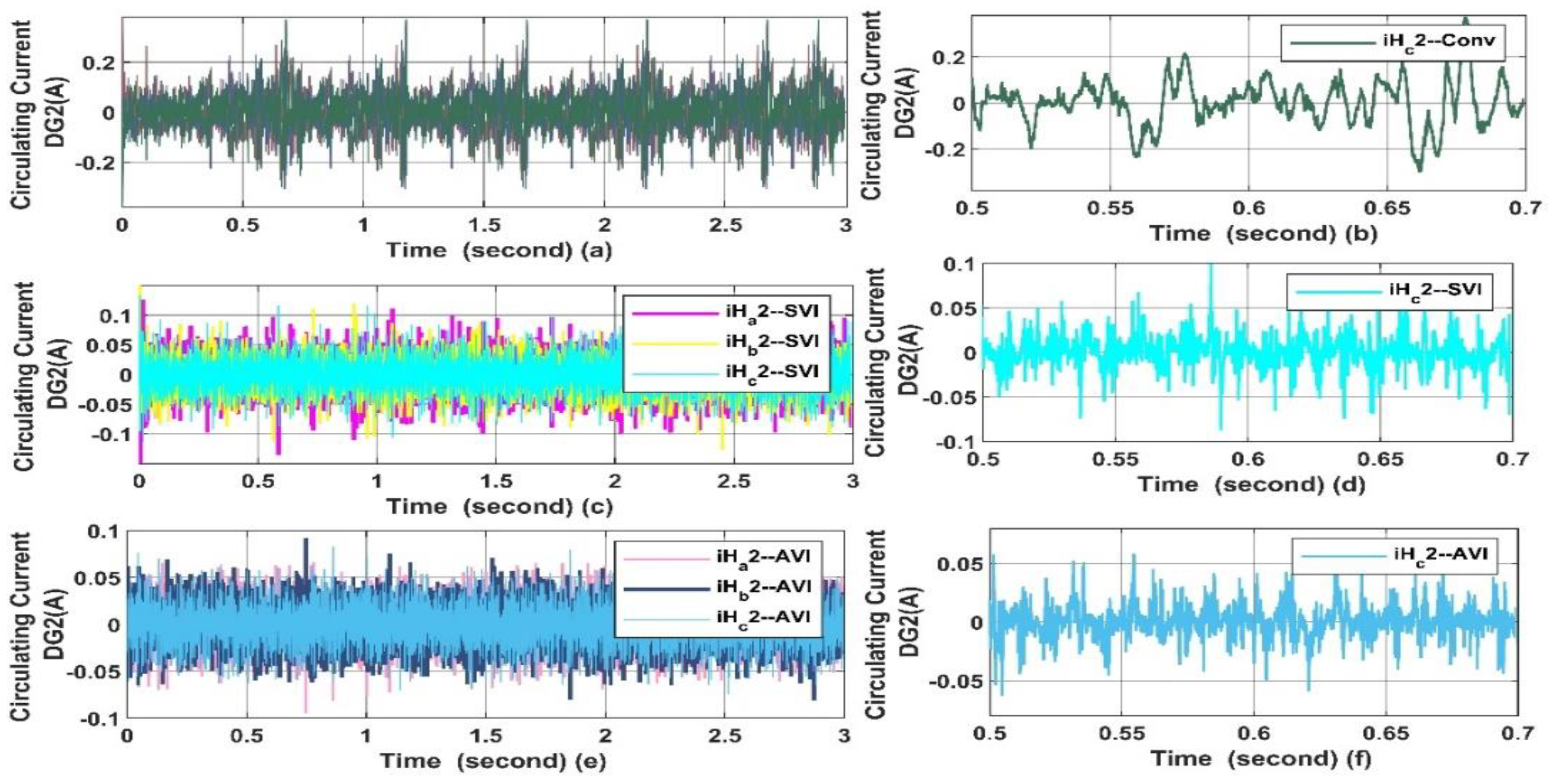
7.3. Circulating Current at PCC
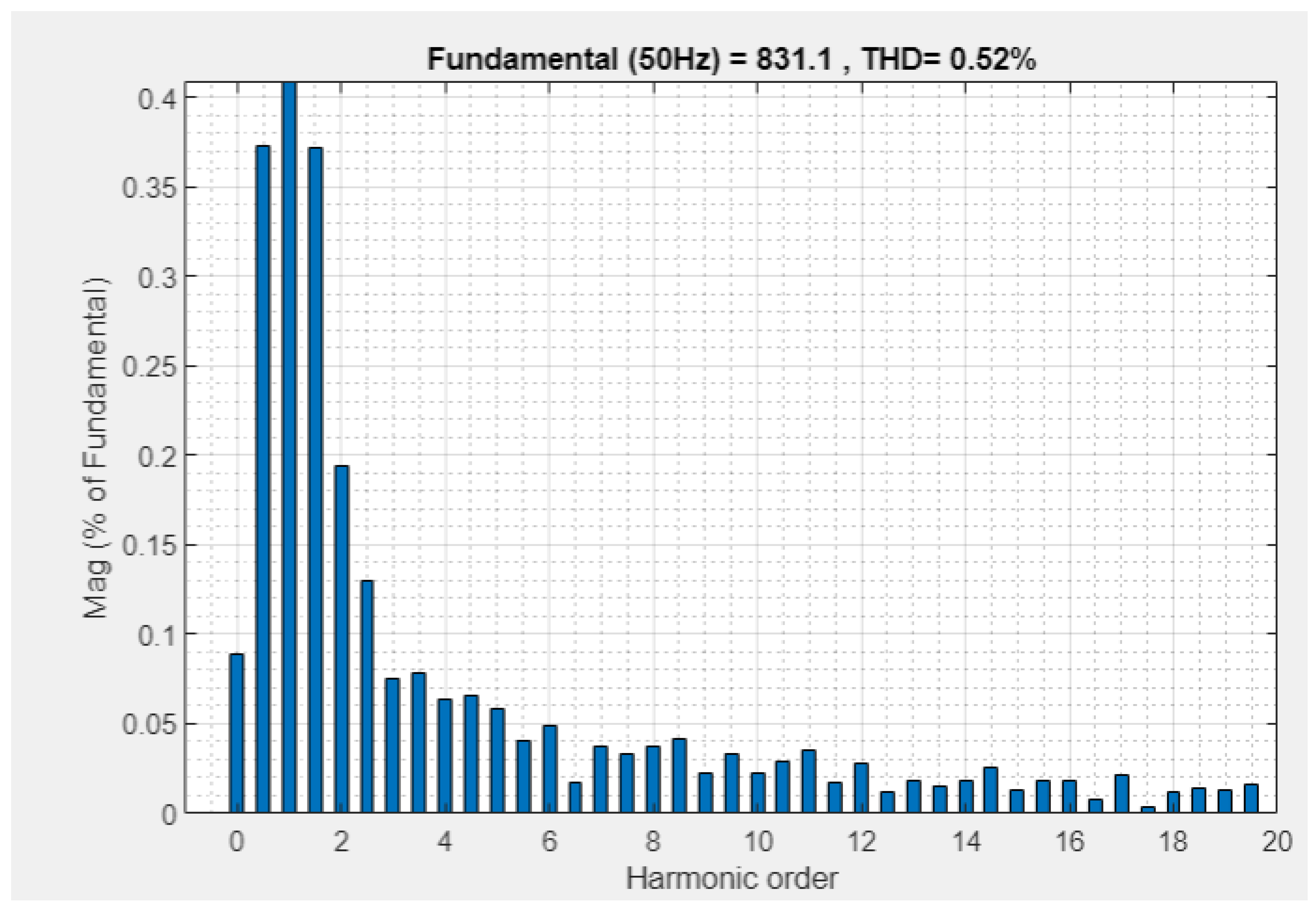
7.4. FFT Spectra Analysis
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hou, S.; Chen, J.; Chen, G. Distributed control strategy for voltage and frequency restoration and accurate reactive power-sharing for islanded microgrid. Energy Rep. 2023, 9, 742–751. [Google Scholar] [CrossRef]
- Jasim, A.M.; Jasim, B.H.; Bureš, V.; Mikulecký, P. A New Decentralized Robust Secondary Control for Smart Islanded Microgrids. Sensors 2022, 22, 8709. [Google Scholar] [CrossRef]
- Feng, K.; Liu, C. Distributed Hierarchical Control for Fast Frequency Restoration in VSG-Controlled Islanded Microgrids. IEEE Open J. Ind. Electron. Soc. 2022, 3, 496–506. [Google Scholar] [CrossRef]
- Hennane, Y.; Pierfederici, S.; Berdai, A.; Meibody-Tabar, F.; Martin, J.P. Distributed control of islanded meshed microgrids. IEEE Access 2023, 11, 78262–78272. [Google Scholar] [CrossRef]
- Wang, G.; Duan, G.; Duan, J.; Cao, S.; Song, Y.; Kang, J. An integrated control method of multi-source islanded microgrids. Energy Rep. 2023, 9, 630–636. [Google Scholar] [CrossRef]
- Zuo, K.; Wu, L. A review of decentralized and distributed control approaches for islanded microgrids: Novel designs, current trends, and emerging challenges. Electr. J. 2022, 35, 5. [Google Scholar] [CrossRef]
- Almousawi, A.Q.; Aldair, P.D.A.A. Design an Accurate Power Control Strategy of Parallel Connected Inverters in Islanded Microgrids. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1105, 012021. [Google Scholar] [CrossRef]
- Mai, R.; Lu, L.; Li, Y.; Lin, T.; He, Z. Circulating Current Reduction Strategy for Parallel-Connected Inverters Based IPT Systems. Energies 2017, 10, 261. [Google Scholar] [CrossRef]
- Guerrero, J.M.; De Vicuña, L.G.; Matas, J.; Miret, J.; Castilla, M. Output impedance design of parallel-connected UPS inverters. IEEE Int. Symp. Ind. Electron. 2004, 2, 1123–1128. [Google Scholar]
- Jin, L.; He, Z. A New Virtual Impedance Method for Parallel. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–26 October 2016; pp. 1–4. [Google Scholar]
- Zhang, M.; Song, B.; Wang, J. Circulating current control strategy based on equivalent feeder for parallel inverters in Islanded microgrid. IEEE Trans. Power Syst. 2018, 34, 595–605. [Google Scholar] [CrossRef]
- Matas, J.; Castilla, M.; De Vicuña, L.G.; Miret, J.; Vasquez, J.C. Virtual impedance loop for droop-controlled single-phase parallel inverters using a second-order general-integrator scheme. IEEE Trans. Power Electron. 2010, 25, 2993–3002. [Google Scholar]
- Zhang, Q.; Peng, C.; Chen, Y.; Lin, G.; Luo, A. A control strategy for parallel operation of multi-inverters in Microgrid. Proc. CSEE 2012, 32, 126–132. [Google Scholar]
- Mohd, A.; Ortjohann, E.; Morton, D.; Omari, O. Review of control techniques for inverters parallel operation. Electr. Power Syst. Res. 2010, 80, 1477–1487. [Google Scholar] [CrossRef]
- Zhang, P.; Li, R.; Shi, J.; He, X. An improved reactive power control strategy for inverters in microgrids. In Proceedings of the IEEE International Symposium on Industrial Electronics, Taipei, Taiwan, 28–31 May 2013. [Google Scholar]
- Avelar, H.J.; Parreira, W.A.; Vieira, J.B.; De Freitas, L.C.G.; Coelho, E.A.A. A state equation model of a single-phase grid-connected inverter using a droop control scheme with extra phase shift control action. IEEE Trans. Ind. Electron. 2011, 59, 1527–1537. [Google Scholar] [CrossRef]
- Pan, C.T.; Liao, Y.H. Modeling and coordinate control of circulating currents in parallel three-phase boost rectifiers. IEEE Trans. Ind. Electron. 2007, 54, 825–838. [Google Scholar] [CrossRef]
- Sanz, C.A.; Miguel, J.; González, R.; Domínguez, J.A. Circulating Current Produced in a System of two Inverters Connected in Parallel Due to a Difference between the Zero-Vector Parameters. Int. J. Renew. Energy Biofuels 2013, 2013, 1–11. [Google Scholar] [CrossRef]
- Hao, C.; Hengyu, L.; Xuchen, L.; Defu, W.; Tie, G.; Wei, W. Parallel Inverter Circulating Current Suppression Method Based on Adaptive Virtual Impedance. In Proceedings of the 2019 4th International Conference on Power and Renewable Energy, ICPRE, Chengdu, China, 21–23 September 2019; pp. 162–166. [Google Scholar]
- Wei, B.; Guerrero, J.M.; Vásquez, J.C. A Circulating Current Suppression Method for Parallel Connected Voltage-Source-Inverters (VSI) with Common DC and AC Buses. IEEE Trans. Ind. Appl. 2017, 53, 3758–3769. [Google Scholar] [CrossRef]
- Ishfaq, M. A New Adaptive Approach to Control Circulating and Output Current of Modular Multilevel Converter. Energies 2019, 12, 1118. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Yaramasu, V.; Fuentes, R.L.; Zargari, N.R. Model Predictive Control of High-Power Modular Multilevel Converters—An Overview. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 168–183. [Google Scholar] [CrossRef]
- Issa, W.; Sharkh, S.; Abusara, M. A review of recent control techniques of drooped inverter-based AC microgrids. Energy Sci. Eng. 2024, 12, 1792–1814. [Google Scholar] [CrossRef]
- Kim, J.; Lee, Y.; Kim, H.; Han, B. A New Reactive-Power Sharing Scheme for Two Inverter-Based Distributed Generations with Unequal Line Impedances in Islanded Microgrids. Energies 2017, 10, 1800. [Google Scholar] [CrossRef]
- Eid, B.M.; Guerrero, J.M.; Abusorrah, A.M.; Islam, M.R. A new voltage regulation strategy using developed power sharing techniques for solar photovoltaic generation-based microgrids. Electr. Eng. 2021, 103, 3023–3031. [Google Scholar] [CrossRef]
- Han, H.; Liu, Y.; Sun, Y.; Su, M.; Guerrero, J.M. An Improved Droop Control Strategy for Reactive Power Sharing in Islanded Microgrid. IEEE Trans. Power Electron. 2014, 30, 3133–3141. [Google Scholar] [CrossRef]
- Zhang, M.; Du, Z.; Lin, X.; Chen, J. Control Strategy Design and Parameter Selection for Suppressing Circulating Current Among SSTs in Parallel. IEEE Trans. Smart Grid 2015, 6, 1602–1609. [Google Scholar] [CrossRef]
- Sun, Y.; Hou, X.; Su, M.; Yang, J.; Han, H. New Perspectives on Droop Control in AC Microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5741–5745. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Accurate Reactive Power Sharing in an Islanded Microgrid using Adaptive Virtual Impedances. IEEE Trans. Power Electron. 2014, 30, 1605–1617. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, C.; Dong, L.; Li, Y.; Zhao, J.; Nian, H.; Kong, L. An Enhanced Droop Control Strategy for Accurate Reactive Power Sharing in Islanded Microgrids. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Asia, ISGT 2019, Chengdu, China, 21–24 May 2019; Volume 19, pp. 2352–2356. [Google Scholar]
- Wei, B.; Guerrero, J.M.; Guo, X. Cross-circulating current suppression method for parallel three-phase two-level inverters. In Proceedings of the 5th IEEE International Conference on Consumer Electronics—Berlin, ICCE-Berlin 2015, Berlin, Germany, 6–9 September 20115; pp. 423–427. [Google Scholar]
- Rodriguez-Martinez, O.F.; Andrade, F.; Vega-Penagos, C.A.; Luna, A.C. A Review of Distributed Secondary Control Architectures in Islanded-Inverter-Based Microgrids. Energies 2023, 16, 878. [Google Scholar] [CrossRef]
- Ghiasi, N.S.; Hadidi, R.; Ghiasi, S.M.S.; Liasi, S.G. A Hybrid Controller with Hierarchical Architecture for Microgrid to Share Power in an Islanded Mode. IEEE Trans. Ind. Appl. 2022, 59, 2202–2209. [Google Scholar] [CrossRef]
- Khan, M.H.; Zulkifli, S.A.; Jackson, R.; Elhassan, G.; Zeb, N.; Abdullah, M.N. Dual Mode Power Sharing Control and Voltage Compensation for Islanded Microgrid. In Proceedings of the 2022 IEEE International Conference on Power and Energy (PEC on 2022), Langkawi, Kedah, Malaysia, 5–6 December 2022; pp. 257–262. [Google Scholar]
- Abbasi, M.; Abbasi, E.; Li, L.; Aguilera, R.P.; Lu, D.; Wang, F. Review on the Microgrid Concept, Structures, Components, Communication Systems, and Control Methods. Energies 2023, 16, 484. [Google Scholar] [CrossRef]
- Tsuchiya, Y.; Fujimoto, Y.U.; Yoshida, A.; Amano, Y.; Hayashi, Y. Operational Planning of a Residential Fuel Cell System for Minimizing Expected Operational Costs Based on a Surrogate Model. IEEE Access 2020, 8, 173983–173998. [Google Scholar] [CrossRef]
- Azim, M.I.; Ali, L.; Peters, J.; Shawon, M.H.; Tatari, F.R.; Muyeen, S.M.; Ghosh, A. A proportional power sharing method through a local control for a low-voltage islanded microgrid. Energy Rep. 2022, 8, 51–59. [Google Scholar] [CrossRef]
- Mohammed, N.; Lashab, A.; Ciobotaru, M.; Guerrero, J.M. Accurate Reactive Power Sharing Strategy for Droop-Based Islanded AC Microgrids. IEEE Trans. Ind. Electron. 2022, 70, 2696–2707. [Google Scholar] [CrossRef]
- Zhang, Z.; Gao, S.; Zhong, C.; Zhang, Z. Accurate Active and Reactive Power Sharing Based on a Modified Droop Control Method for Islanded Microgrids. Sensors 2023, 23, 14. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Zhou, J.; Liang, L.; Wu, Y.; Cai, S. Consensus active power sharing for islanded microgrids based on distributed angle droop control. IET Renew. Power Gener. 2021, 15, 2826–2839. [Google Scholar] [CrossRef]
- Fani, B.; Shahgholian, G.; Alhelou, H.H.; Siano, P. Inverter-based islanded microgrid: A review on technologies and control. e-Prime—Adv. Electr. Eng. Electron. Energy 2022, 2, 100068. [Google Scholar] [CrossRef]
- Pham, M.-D.; Lee, H.-H. Enhanced Reactive Power Sharing and Voltage Restoration in Islanded Microgrid. In Proceedings of the KIPE Conference, Daejeon, Republic of Korea, 5–8 December 2016; pp. 47–48. [Google Scholar]
- Saleh-ahmadi, A.; Moattari, M.; Gahedi, A.; Pouresmaeil, E. Droop method development for microgrids control considering higher order sliding mode control approach and feeder impedance variation. Appl. Sci. 2021, 11, 967. [Google Scholar] [CrossRef]
- Sabzevari, K.; Karimi, S. Modified droop control for improving adaptive virtual impedance strategy for parallel distributed generation units in islanded microgrids. Int. Trans. Electr. Energy Syst. 2018, 29, e2689. [Google Scholar] [CrossRef]
- Lu, F.; Liu, H. An Accurate Power Flow Method for Microgrids with Conventional Droop Control. Energies 2022, 15, 5841. [Google Scholar] [CrossRef]
- Dong, J.; Gong, C.; Chen, H.; Wang, Z. Secondary frequency regulation and stabilization method of islanded droop inverters based on integral leading compensator. Energy Rep. 2022, 8, 1718–1730. [Google Scholar] [CrossRef]
- Mohammadi, F.; Mohammadi-Ivatloo, B.; Gharehpetian, G.B.; Ali, M.H.; Wei, W.; Erdinc, O.; Shirkhani, M. Robust Control Strategies for Microgrids: A Review. IEEE Syst. J. 2021, 16, 2401–2412. [Google Scholar] [CrossRef]
- Babayomi, O.; Zhang, Z.; Li, Y.; Kennel, R. Adaptive predictive control with neuro-fuzzy parameter estimation for microgrid grid-forming converters. Sustainability 2021, 13, 7038. [Google Scholar] [CrossRef]
- Taher, A.M.; Hasanien, H.M.; Ginidi, A.R.; Taha, A.T.M. Hierarchical Model Predictive Control for Performance Enhancement of Autonomous Microgrids. Ain Shams Eng. J. 2021, 12, 1867–1881. [Google Scholar] [CrossRef]
- Scoltock, J.; Geyer, T.; Madawala, U.K. A comparison of model predictive control schemes for MV induction motor drives. IEEE Trans. Ind. Inform. 2012, 9, 909–919. [Google Scholar] [CrossRef]
- Halpin. Revisions to ieee standard 519-1992. In Proceedings of the 2005/2006 IEEE/PES Transmission and Distribution Conference and Exhibition, Dallas, TX, USA, 21–24 May 2006; pp. 149–1151. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value/Unit | Parameter | Value |
|---|---|---|---|
| Vnom | 415 V | Load | 1500 W, 700 VAR |
| fnom | 50 Hz | Rf | 0.23 Ω |
| Feeder1 resistance | 0.19 Ω | Feeder1 resistance | 3.3 mH |
| Feeder1 inductance | 2.83 mH | Feeder2 inductance | 3.14 mH |
| Sampling time, Ts | 12 × 10−6 | Lf | 0.1 Ω |
| Weighting factors (λd and λu) | 0.002–0.05 | Cf | 20 μF |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, M.H.; Zulkifli, S.A.; Tutkun, N.; Ekmekci, I.; Burgio, A. Decentralized Virtual Impedance Control for Power Sharing and Voltage Regulation in Islanded Mode with Minimized Circulating Current. Electronics 2024, 13, 2142. https://doi.org/10.3390/electronics13112142
Khan MH, Zulkifli SA, Tutkun N, Ekmekci I, Burgio A. Decentralized Virtual Impedance Control for Power Sharing and Voltage Regulation in Islanded Mode with Minimized Circulating Current. Electronics. 2024; 13(11):2142. https://doi.org/10.3390/electronics13112142
Chicago/Turabian StyleKhan, Mubashir Hayat, Shamsul Aizam Zulkifli, Nedim Tutkun, Ismail Ekmekci, and Alessandro Burgio. 2024. "Decentralized Virtual Impedance Control for Power Sharing and Voltage Regulation in Islanded Mode with Minimized Circulating Current" Electronics 13, no. 11: 2142. https://doi.org/10.3390/electronics13112142