
Continuous Time Simulation and System-Level Model of a MVDC Distribution Grid Including SST and MMC-Based AFE



Abstract
:1. Introduction
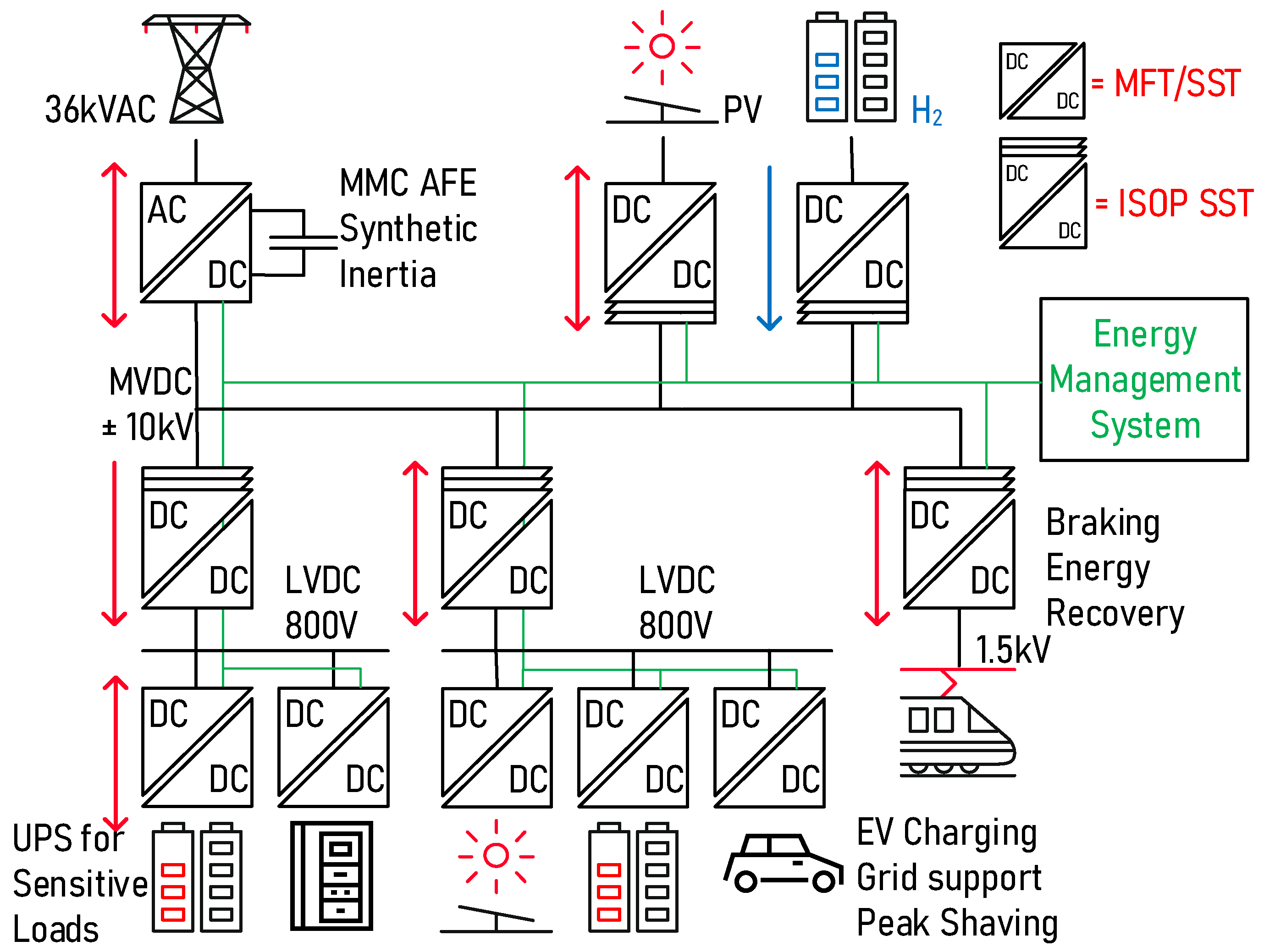
1.1. Prospects and Challenges in MVDC
1.2. System-Level Modelling and Simulation
2. Voltage/Current Source System-Level Models
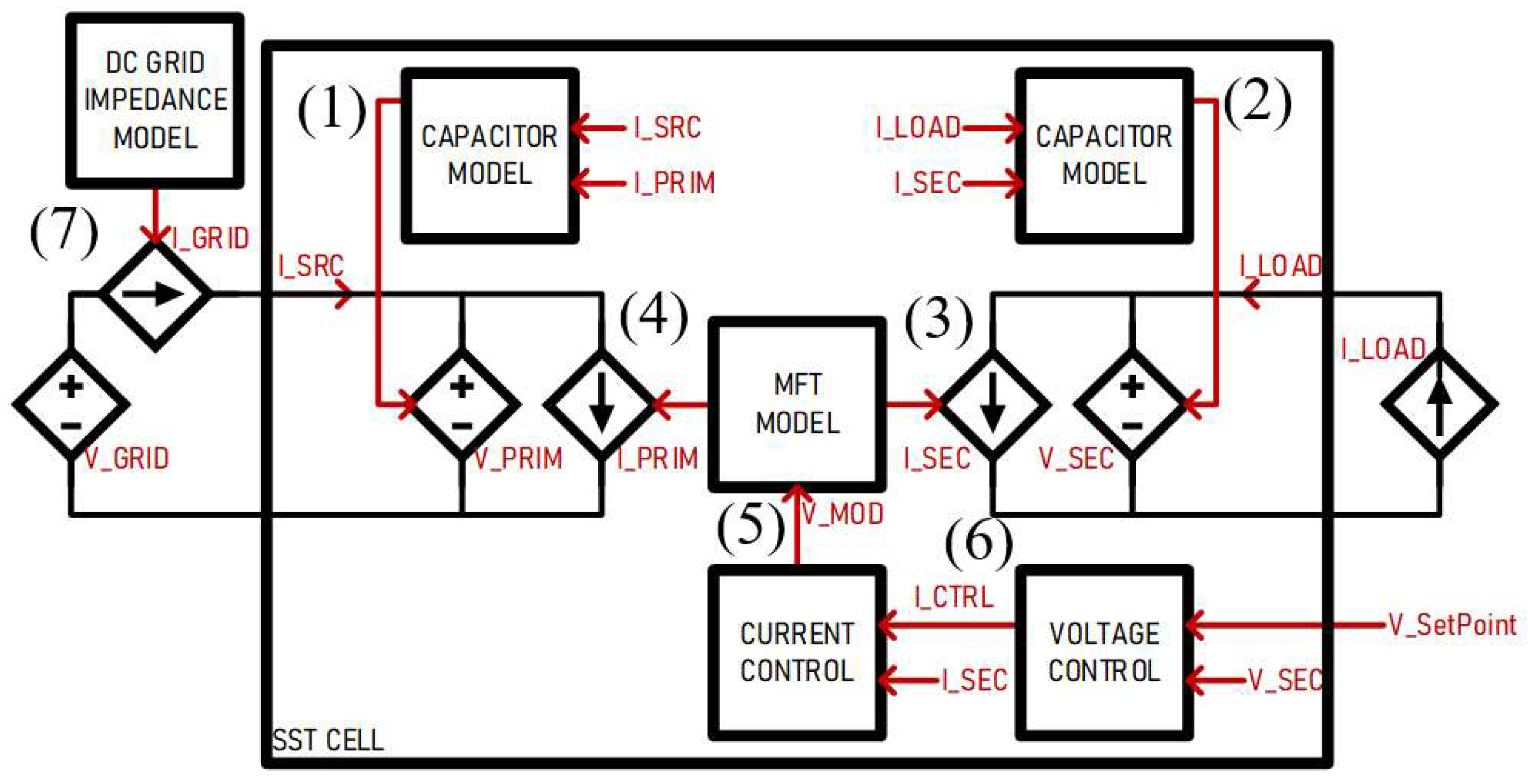
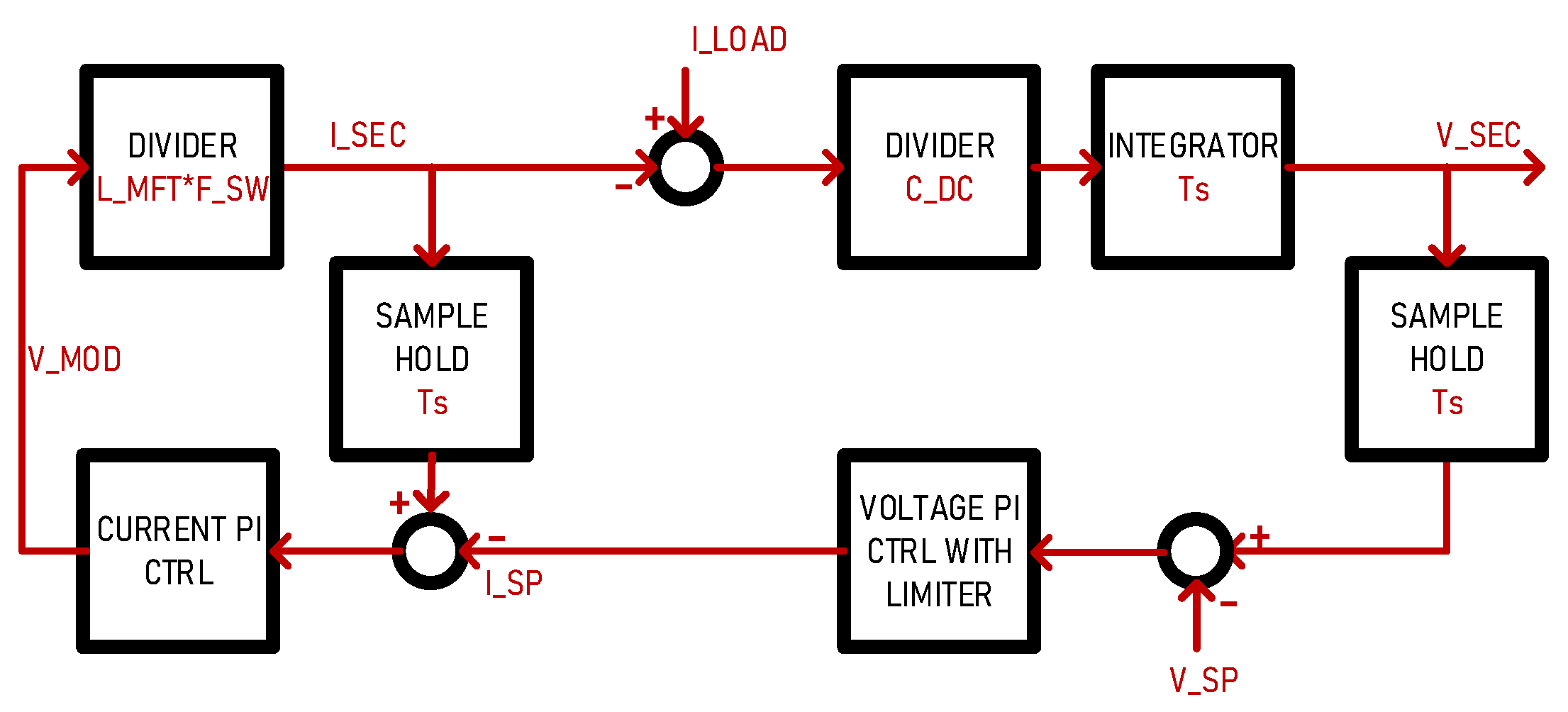
2.1. SST Elementary Cell
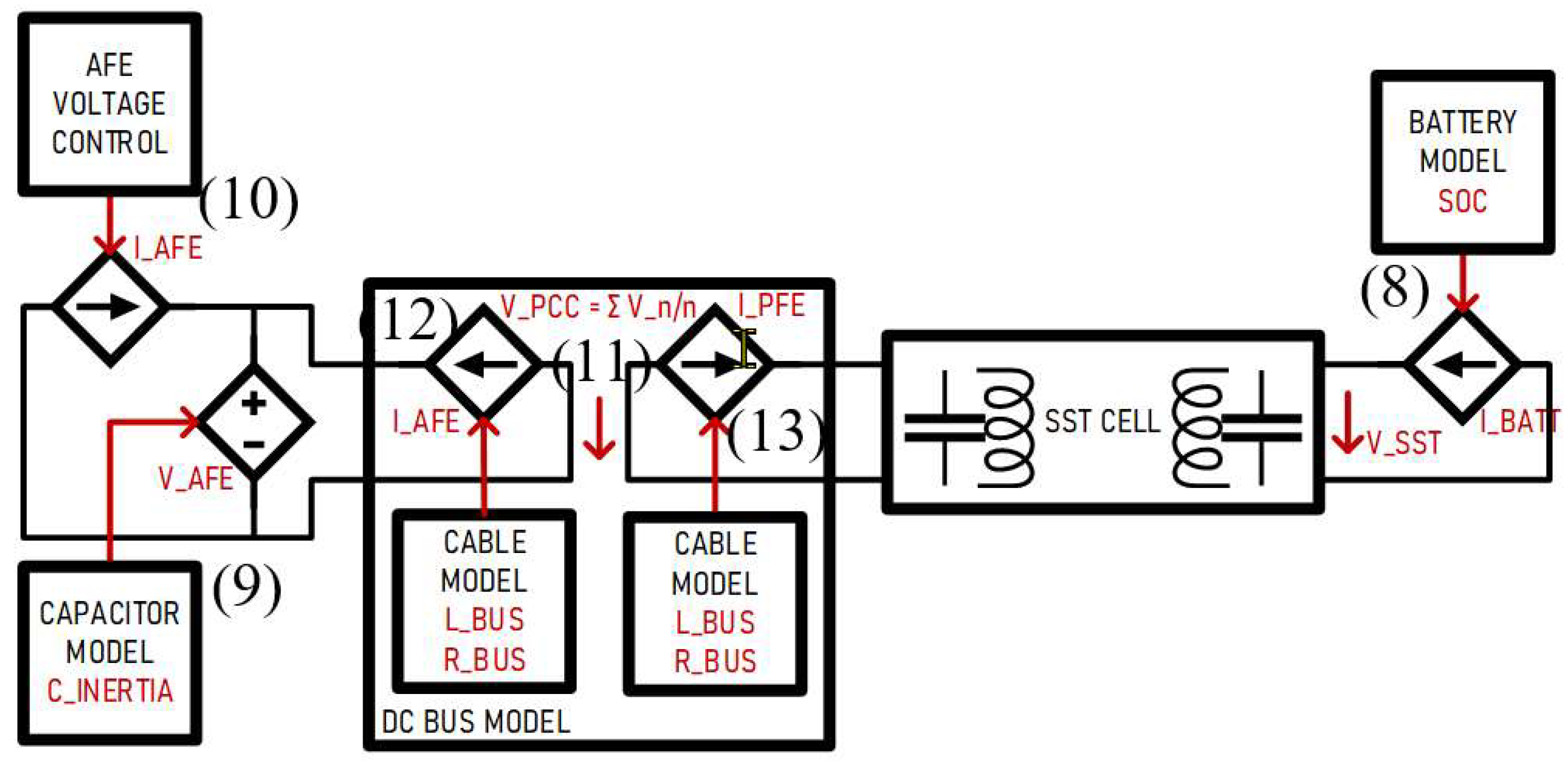
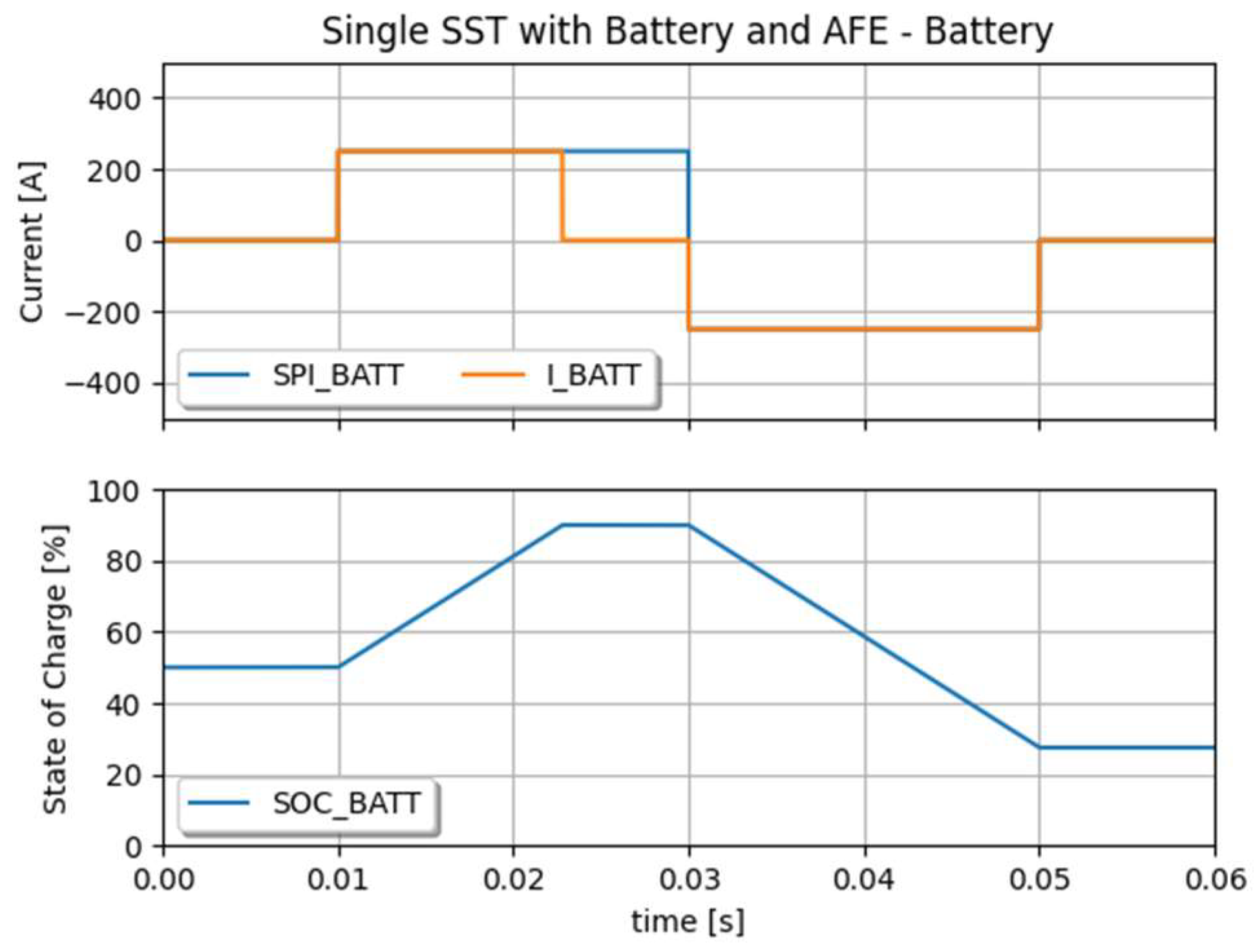
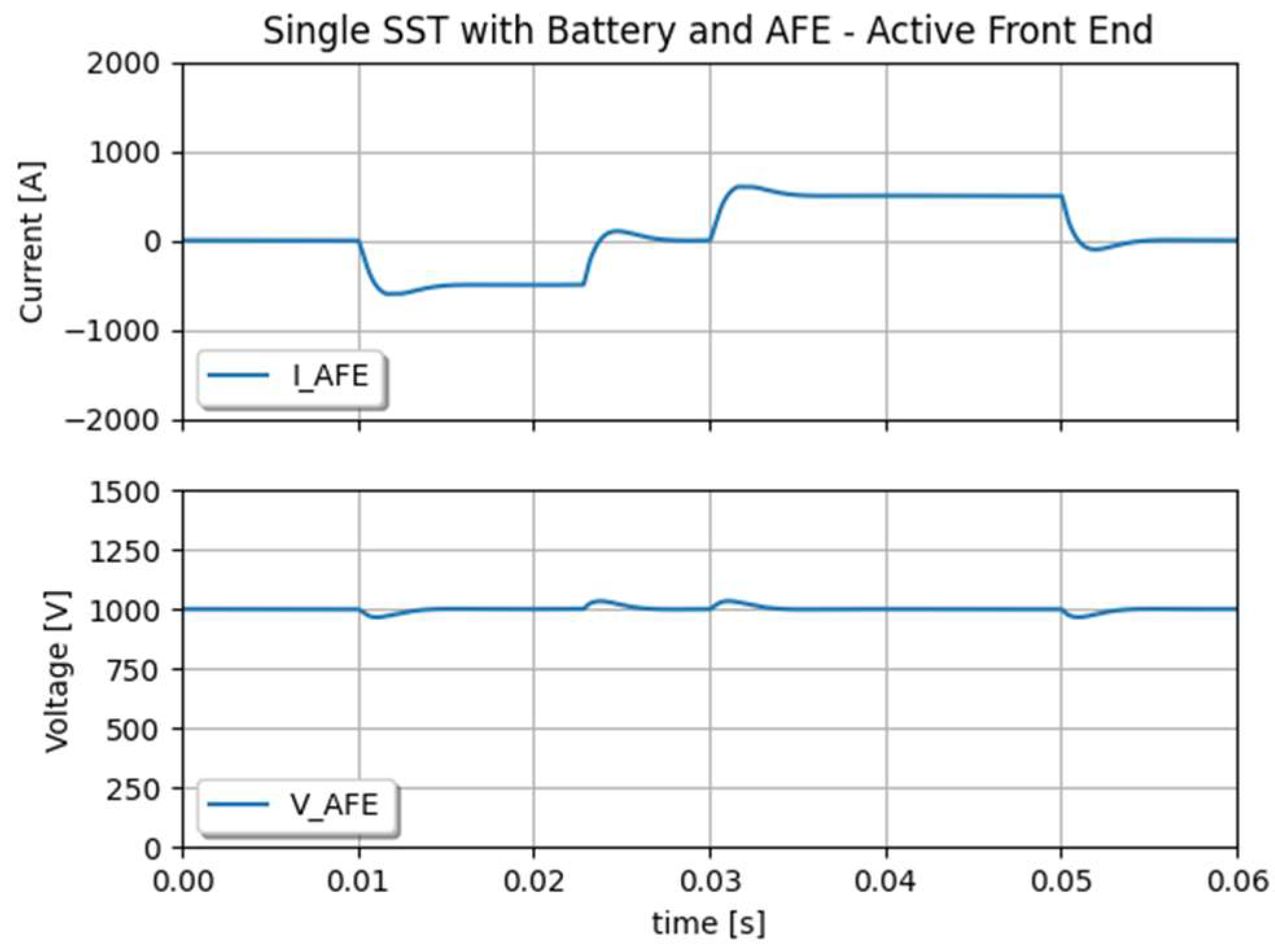
2.2. SST Cell Connecting a Battery and an AFE through a PCC
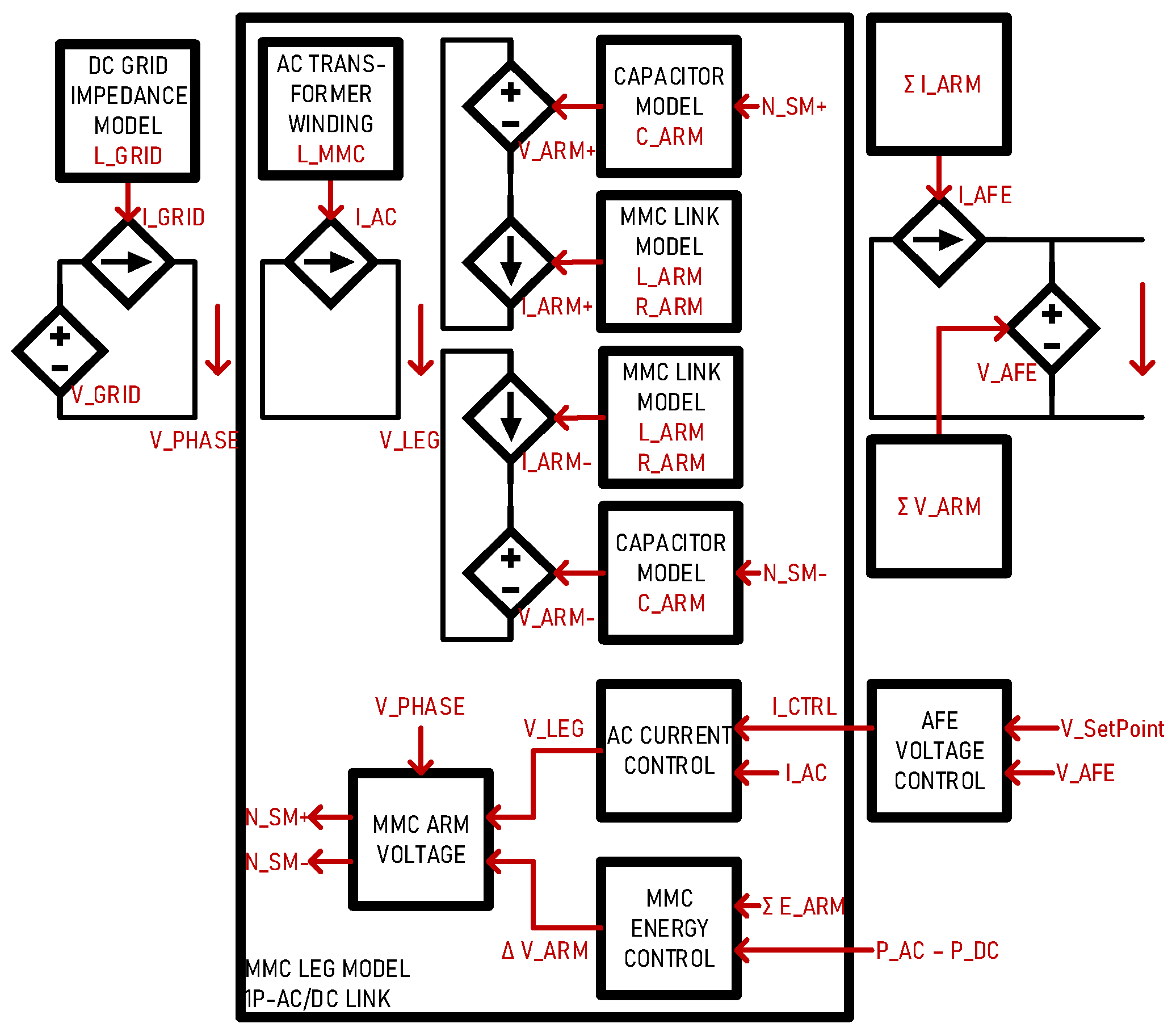
2.3. Considerations on Modelling MMC and AC Connection
2.4. Discretisation in the Simulation Model and Stability
3. Modelling of the Modular SST
3.1. Parallel Connection in Modular SST
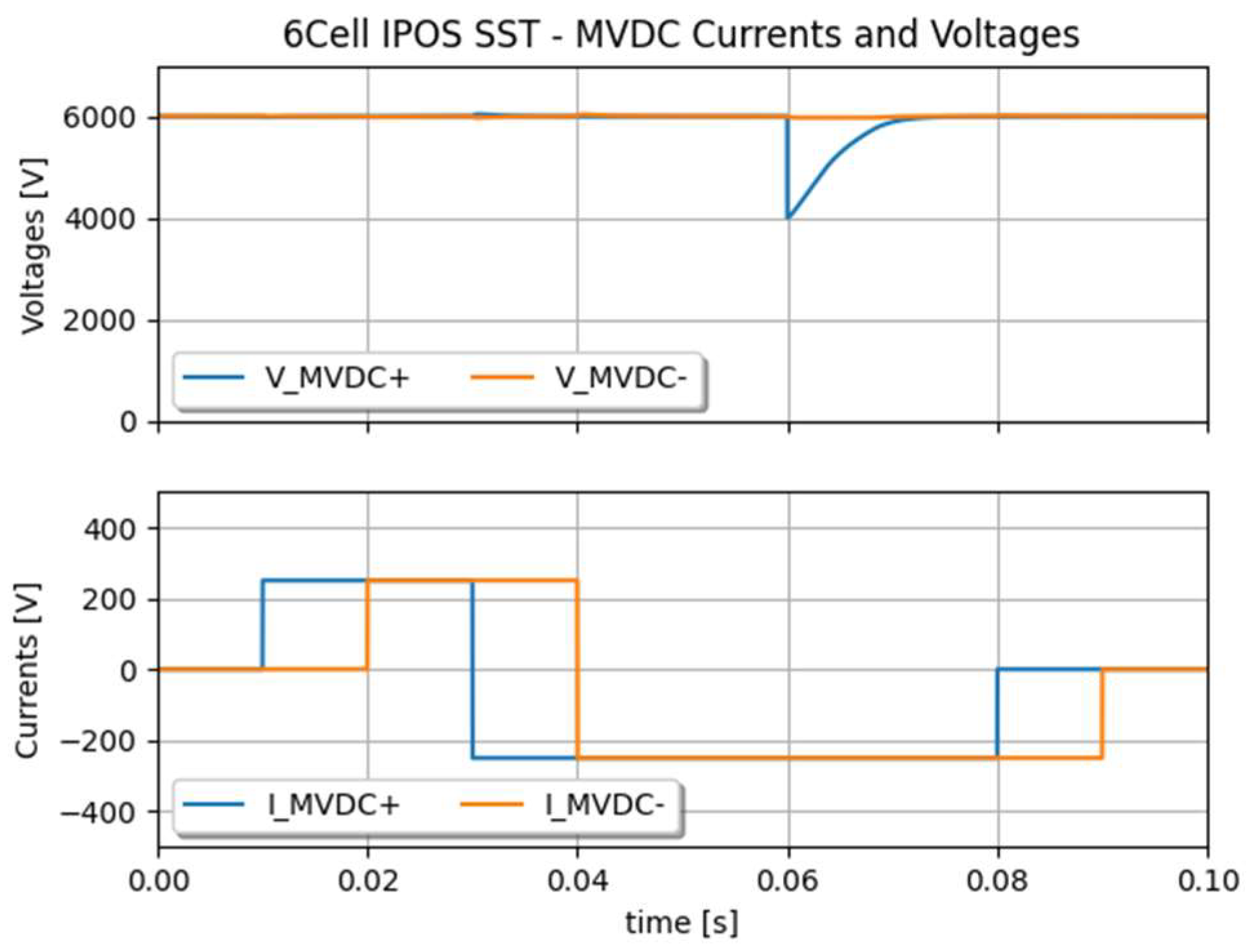
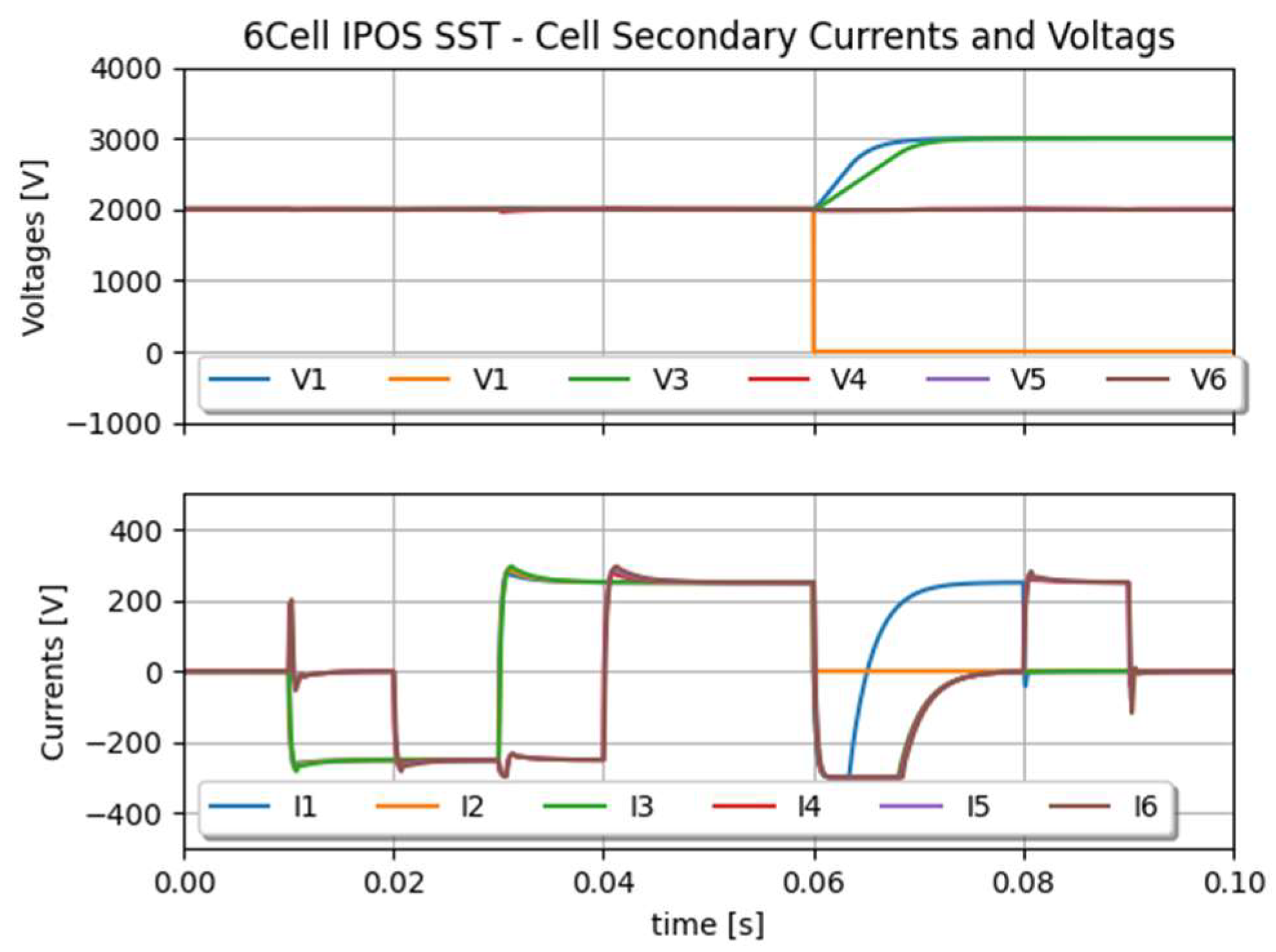
3.2. SST in IPOS Configuration with Faults
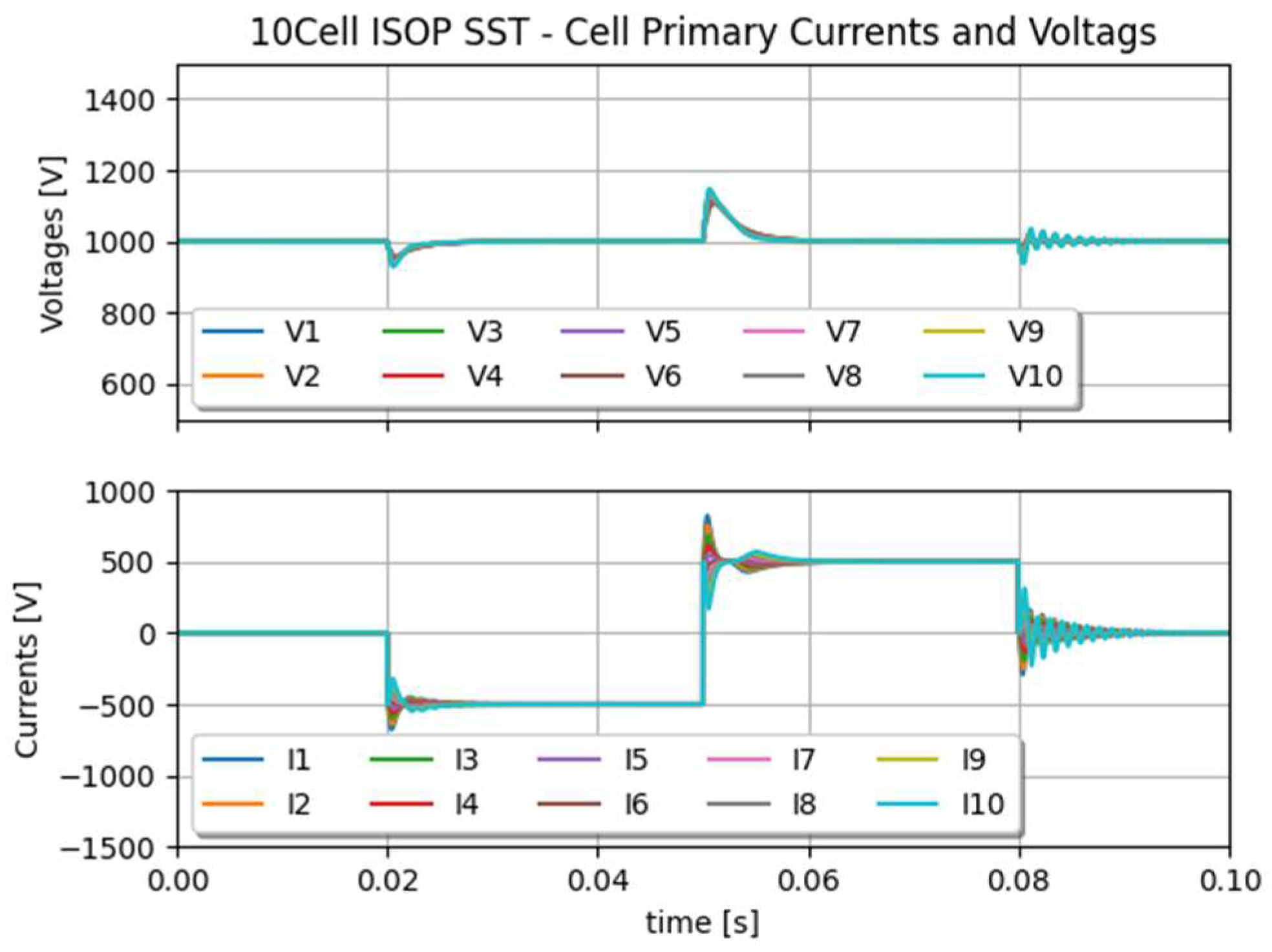
3.3. SST in ISOP Configuration
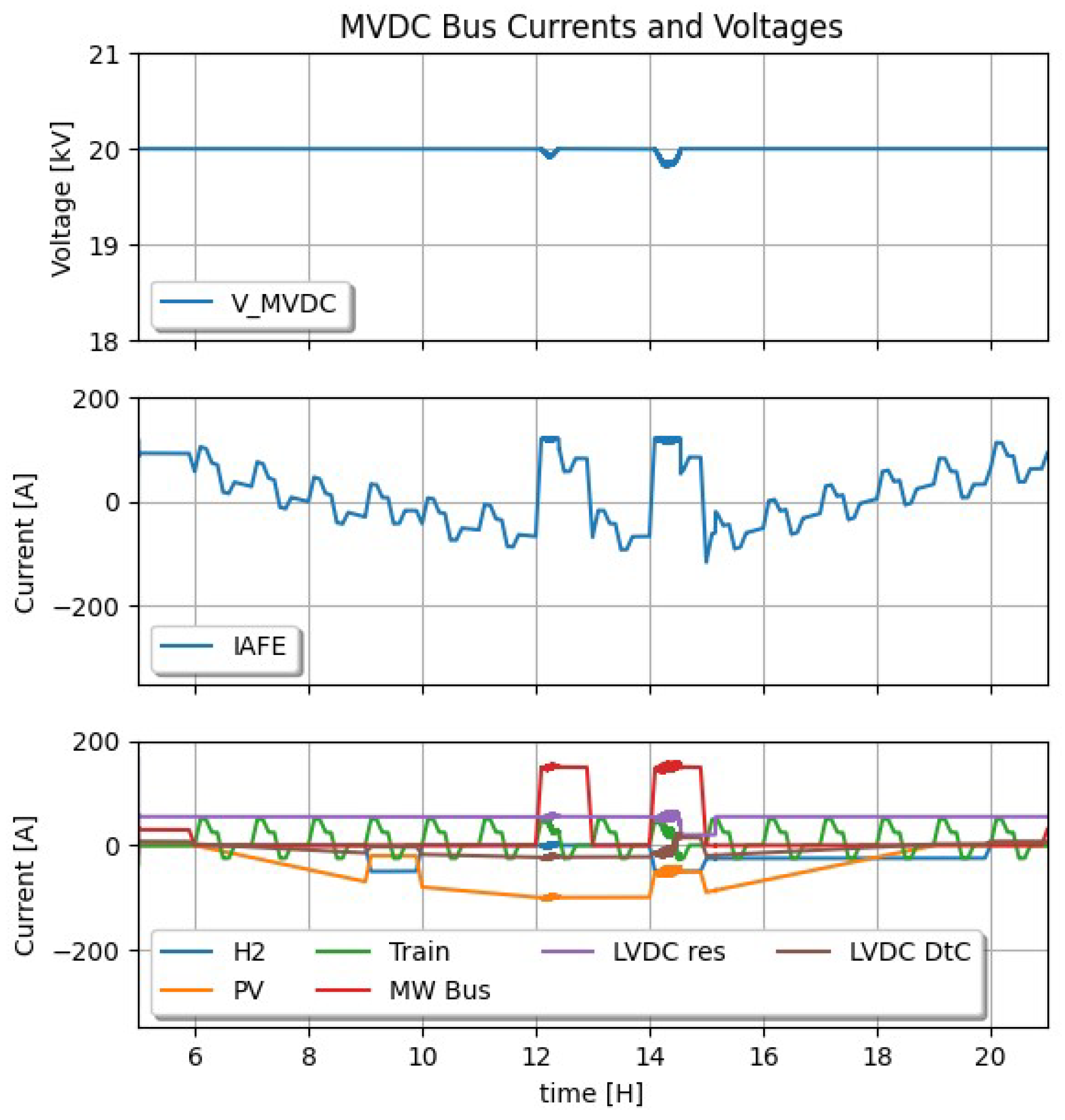
4. Simulation of the Full MVDC System
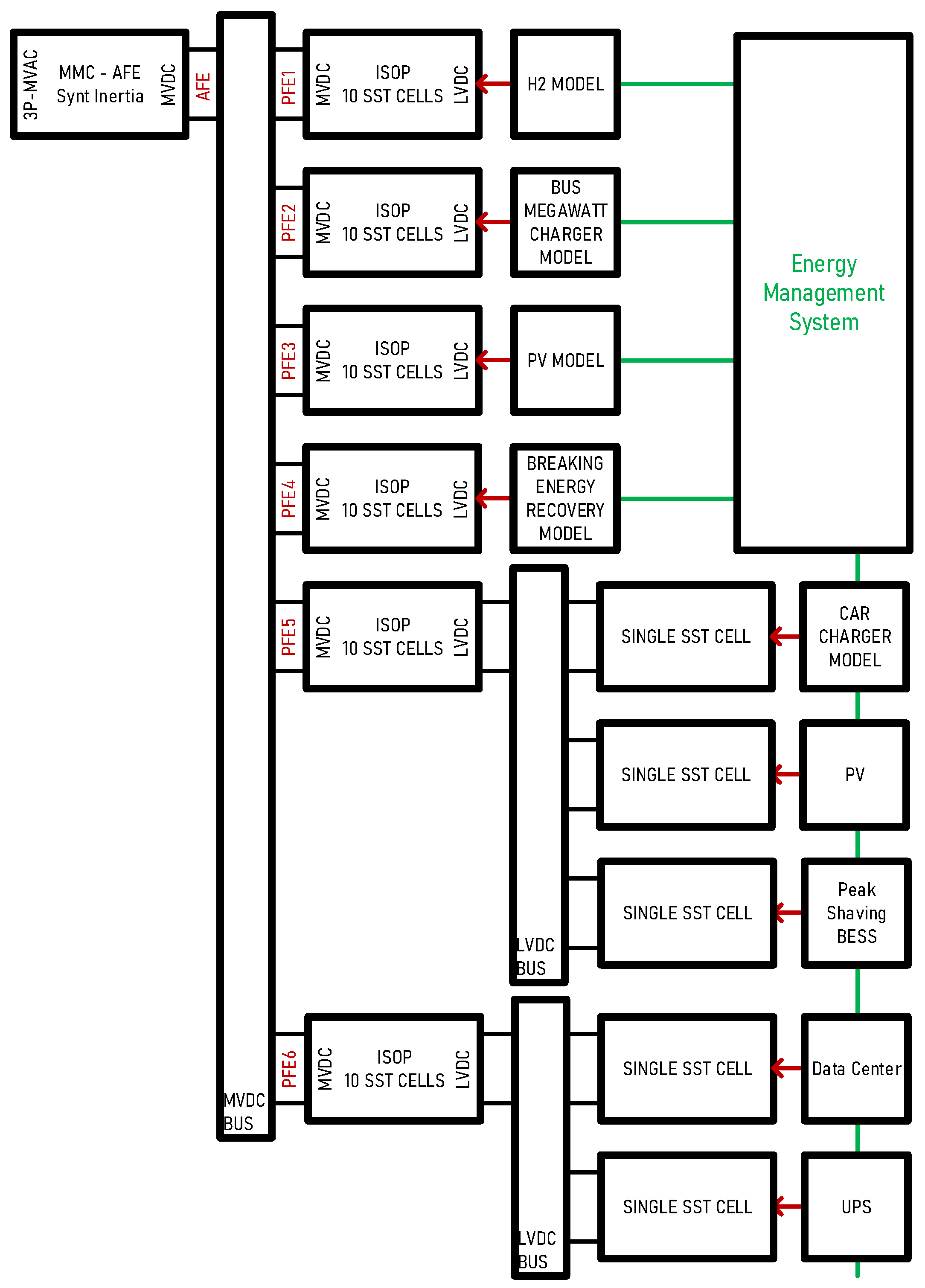
4.1. Full Power System Model
4.2. Continuous Time Model Interface
5. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| AI | Artificial Intelligence |
| AFE | Active Front End |
| DAB | Dual Active Bridge |
| DM | Data Mining |
| EV | Electric Vehicle |
| HMG | Conventional hybrid AC–DC microgrid |
| ISOP | Input Series Output Parallel |
| MHM | Meshed Hybrid Microgrid |
| MMC | Modular Multilevel Convert |
| LVD | Low-Voltage DC |
| MFT | Medium-Frequency Transformer |
| MM | Modular Multilevel Converter |
| MVDC | Medium-Voltage DC |
| PET | Power Electronics Transformer |
| PFE | Passive Front End |
| PPC | Point of Common Coupling |
| REG | Renewable Energy Generation |
| SoC | State of Charge (battery related) |
| SST | Solid-State Transformer |
| ST | Smart Transformer |
| UPS | Uninterrupted Power Supply |
References
- Li, W.; Li, Y.; Yu, S.; Wei, T.; Chen, J.; Liu, Y.; Xu, S. State of the Art of Researches and Applications of MVDC Distribution Systems in Power Grid. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 5680–5685. [Google Scholar] [CrossRef]
- Núñez-Rodríguez, R.A.; Unsihuay-Vila, C.; Posada, J.; Pinzón-Ardila, O.; Aoki, A.R.; Bueno-Otto, R. Real-Time Testing Optimal Power Flow in Smart-Transformer-Based Meshed Hybrid Microgrids: Design and Validation. Energies 2024, 17, 1950. [Google Scholar] [CrossRef]
- Das, D.; Kumar, C. Partial Startup Scheme for Smart Transformer in Meshed Hybrid Islanded Grid Operation. IEEE Trans. Ind. Appl. 2022, 58, 142–151. [Google Scholar] [CrossRef]
- Hrishikesan, V.M.; Kumar, C.; Liserre, M. An MVDC-Based Meshed Hybrid Microgrid Enabled Using Smart Transformers. IEEE Trans. Ind. Electron. 2022, 69, 3722–3731. [Google Scholar] [CrossRef]
- Zhao, X.; Li, B.; Fu, Q.; Mao, S.; Xu, D.G.; Leon, J.I.; Franquelo, L.G. DC Solid State Transformer Based on Three-Level Power Module for Interconnecting MV and LV DC Distribution Systems. IEEE Trans. Power Electron. 2021, 36, 1563–1577. [Google Scholar] [CrossRef]
- Jin, H.; Chen, W.; Hou, K.; Shao, S.; Shu, L.; Li, R. A Sharing-Branch Modular Multilevel DC Transformer with Wide Voltage Range Regulation for DC Distribution Grids. IEEE Trans. Power Electron. 2021, 37, 5714–5730. [Google Scholar] [CrossRef]
- Zhuang, Y.; Liu, F.; Huang, Y.; Wang, S.; Pan, S.; Zha, X.; Diao, X. A Multiport DC Solid-state Transformer for MVDC Integration Interface of Multiple Distributed Energy Sources and DC Loads in Distribution Network. IEEE Trans. Power Electron. 2022, 37, 2283–2296. [Google Scholar] [CrossRef]
- Sha, G.; Duan, Q.; Sheng, W.; Ma, C.; Zhao, C.; Zhang, Y.; Tian, J. Research on Multi-Port DC-DC Converter Based on Modular Multilevel Converter and Cascaded H Bridges for MVDC Applications. IEEE Access 2021, 9, 95006–95022. [Google Scholar] [CrossRef]
- Zhao, S.; Chen, Y.; Cui, S.; Hu, J. Modular Multilevel DC-DC Converter with Inherent Bipolar Operation Capability for Resilient Bipolar MVDC Grids. CPSS Trans. Power Electron. Appl. 2022, 7, 37–48. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Y.; Zhou, J.; Wang, J.; Shi, G.; Cai, X. Control of a Hybrid Modular Solid-State Transformer for Uninterrupted Power Supply Under MVdc Short-Circuit Fault. IEEE Trans. Ind. Electron. 2023, 70, 76–87. [Google Scholar] [CrossRef]
- Sadat, A.R.; Krishnamoorthy, H.S. Fault-Tolerant ISOSP Solid-State Transformer for MVDC Distribution. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 6985–6996. [Google Scholar] [CrossRef]
- Liao, J.; Zhou, N.; Qin, Z.; Purgat, P.; Wang, Q.; Bauer, P. Coordination Control of Power Flow Controller and Hybrid DC Circuit Breaker in MVDC Distribution Networks. J. Mod. Power Syst. Clean Energy 2021, 9, 1257–1268. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Q.; Li, B.; Wei, T.; Zhu, Z.; Li, W.; Wen, W.; Wang, C. A Practical DC Fault Ride-Through Method for MMC Based MVDC Distribution Systems. IEEE Trans. Power Deliv. 2021, 36, 2510–2519. [Google Scholar] [CrossRef]
- Feng, X.; Xiong, Q.; Gattozzi, A.L.; Hebner, R.E. Partial Discharge Experimental Study for Medium Voltage DC Cables. IEEE Trans. Power Deliv. 2021, 36, 1128–1136. [Google Scholar] [CrossRef]
- Hunter, L.C.; Booth, C.D.; Egea-Alvarez, A.; Dysko, A.; Finney, S.J.; Junyent-Ferre, A. A New Fast-Acting Backup Protection Strategy for Embedded MVDC Links in Future Distribution Networks. IEEE Trans. Power Deliv. 2021, 36, 861–869. [Google Scholar] [CrossRef]
- Zhang, G.; Song, J.; Li, C.; Gu, X. A Circulating Current Suppression Strategy for MMC Based on the 2N+1 PWM Approach. World Electr. Veh. J. 2023, 14, 106. [Google Scholar] [CrossRef]
- Pesce, C.; Riedemann, J.; Peña, R.; Andrade, I.; Jara, W.; Villalobos, R. Decoupled Control for Double-T Dc-Dc MMC Topology for MT-HVdc/MVdc Grids. Appl. Sci. 2023, 13, 3778. [Google Scholar] [CrossRef]
- Liao, Z.; Jiao, Y.; Suo, Z.; Li, B.; Zhao, X.; Han, L.; Xu, D. A Three-Port Power Electronic Transformer Based on Magnetic Integration. Appl. Sci. 2022, 12, 11607. [Google Scholar] [CrossRef]
- Lin, Y.; Fu, L. A Study for a Hybrid Wind-Solar-Battery System for Hydrogen Production in an Islanded MVDC Network. IEEE Access 2022, 10, 85355–85367. [Google Scholar] [CrossRef]
- Robertson, J.; Harrison, G.; Wallace, A. A pseudo-real time distribution network simulator for analysis of coordinated ANM control strategies. In Proceedings of the CIRED 2012 Workshop: Integration of Renewables into the Distribution Grid, Lisbon, Portugal, 29–30 May 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Lo, B.; Monti, A.; Dougal, R. Real-time hardware-in-the-loop testing during design of power electronics controls. In Proceedings of the IECON’03, 29th Annual Conference of the IEEE Industrial Electronics Society (IEEE Cat. No.03CH37468), Roanoke, VA, USA, 2–6 November 2003; Volume 2, pp. 1840–1845. [Google Scholar] [CrossRef]
- Kiffe, A.; Formann, S.; Schulte, T.; Maas, J. Hardware-in-the-loop capable state-space-averaging models for power converters in discontinuous conduction mode considering parasitic component behavior. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- Nayak, G.; Dasgupta, A. Full Order Averaged Modelling for Modular Solid State Transformer. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, J.; Buticchi, G.; Yan, H.; Gu, C.; Zhang, H.; Wheeler, P. Impedance-based Sensitivity Analysis of Dual Active Bridge DC-DC Converter. In Proceedings of the 2019 IEEE 13th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Sonderborg, Denmark, 23–25 April 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Rosyadi, M.; Umemura, A.; Takahashi, R.; Tamura, J. Detailed and Average Models of a Grid-Connected MMC-Controlled Permanent Magnet Wind Turbine Generator. Appl. Sci. 2022, 12, 1619. [Google Scholar] [CrossRef]
- Siemaszko, D.; Noisette, P. Power System Simulation Tool for Quick Benchmarking of Innovative MVDC Grids in E-Mobility Applications. In Proceedings of the 2022 24th European Conference on Power Electronics and Applications (EPE’22 ECCE Europe), Hanover, Germany, 5–9 September 2022. [Google Scholar]
- Stieneker, M.; De Doncker, R.W. Dual-Active Bridge DC-DC Converter Ssystems for Medium-Voltage DC Distribution Grids. In Proceedings of the Power Electronics Conference 2015, COBEP 2015, Fortaleza, Brazil, 29 November–2 December 2015. [Google Scholar]
- Barrade, P. Électronique de Puissance; Presses Polytechniques et Universitaires Romandes: Lausanne, Switzerland, 2006. [Google Scholar]
- Available online: https://simba.io/ (accessed on 3 March 2024).
- Heinig, S.; Siemaszko, D.; Baumann, R.; Hubatka, N.; Klaeusler, M.; Ruiz, R.; Burkart, R.; Yuan, C. Experimental Insights into the MW Range Dual Active Bridge with Silicon Carbide Devices. In Proceedings of the International Power Electronics Conference IPEC-Himeji 2022—ECCE ASIA, Himeji, Japan, 15–19 May 2022. [Google Scholar]
- Angquist, L.; Antonopoulos, A.; Siemaszko, D.; Ilves, K.; Vasiladiotis, M.; Nee, H.-P. Open-Loop Control of Modular Multilevel Converters Using Estimation of Stored Energy. IEEE Trans. Ind. Appl. 2011, 47, 2516–2524. [Google Scholar] [CrossRef]
- Milovanovic, S.; Luo, M.; Dujic, D. Virtual Capacitor Concept for Computationally Efficient and Flexible Real-Time MMC Model. IEEE Access 2021, 9, 144211–144226. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Comment | |
|---|---|---|---|
| DC nominal voltage on primary side | VPRIM | 1000 V | Set by grid model VGRID |
| DC nominal voltage on secondary side | VSEC | 2000 V | Controlled by SST |
| nominal current on secondary side | ISEC | 250 A | Set by load model ILOAD |
| maximum current on secondary side | ISEC_MAX | 300 A | Controlled by SST |
| MFT-side SST inductance | LMFT | 8.5 µH | Defines control’s time response |
| DC-side SST capacitor | CDC | 3 mF | Defines control’s time response |
| MFT switching frequency | fSW | 10 kHz | Defines control’s transfer function |
| Simulation time step | ts | 1 µs | This time step is used in all runs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siemaszko, D.; Carpita, M. Continuous Time Simulation and System-Level Model of a MVDC Distribution Grid Including SST and MMC-Based AFE. Electronics 2024, 13, 2193. https://doi.org/10.3390/electronics13112193
Siemaszko D, Carpita M. Continuous Time Simulation and System-Level Model of a MVDC Distribution Grid Including SST and MMC-Based AFE. Electronics. 2024; 13(11):2193. https://doi.org/10.3390/electronics13112193
Chicago/Turabian StyleSiemaszko, Daniel, and Mauro Carpita. 2024. "Continuous Time Simulation and System-Level Model of a MVDC Distribution Grid Including SST and MMC-Based AFE" Electronics 13, no. 11: 2193. https://doi.org/10.3390/electronics13112193