
Adaptive Speed Control Scheme Based on Congestion Level and Inter-Vehicle Distance



Abstract
:1. Introduction
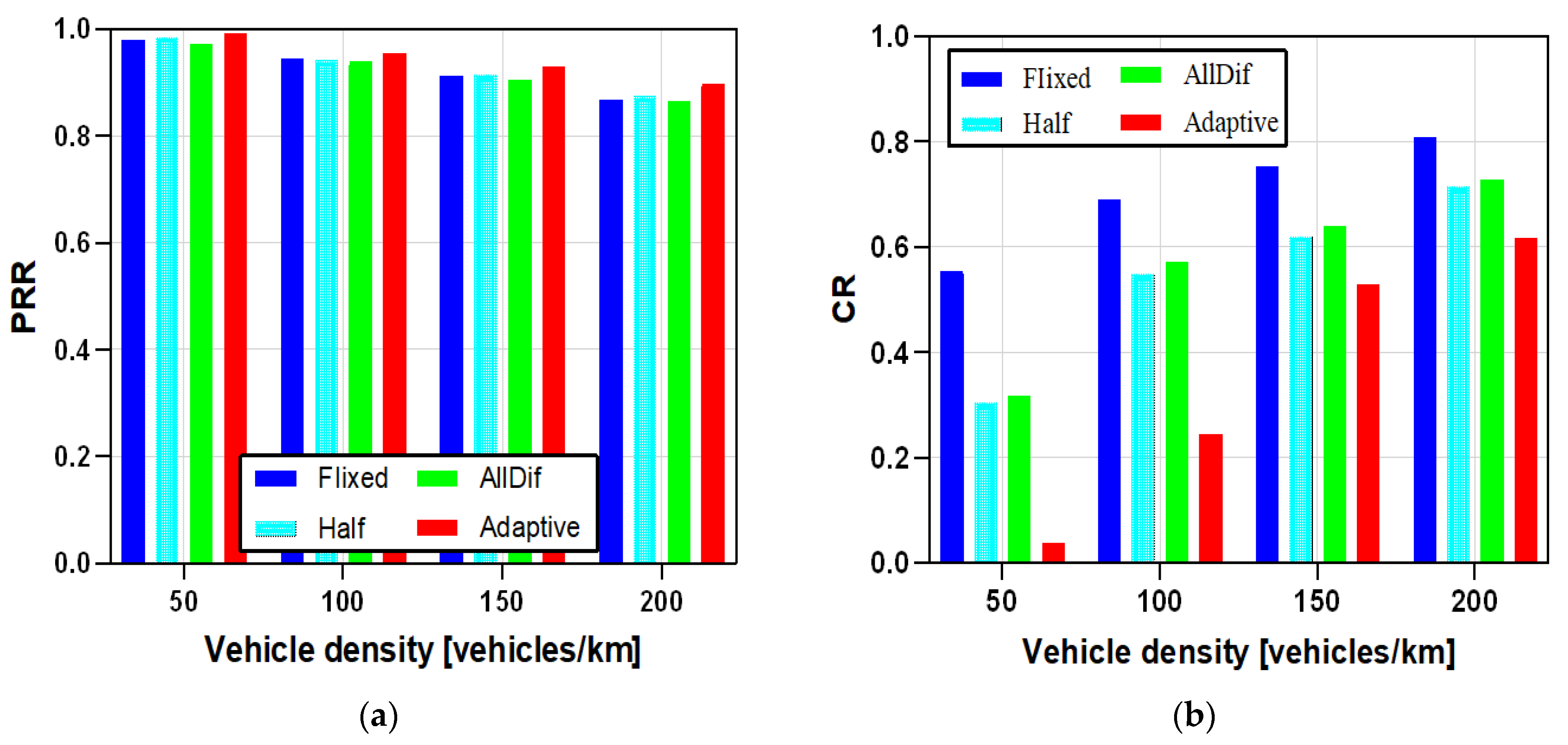
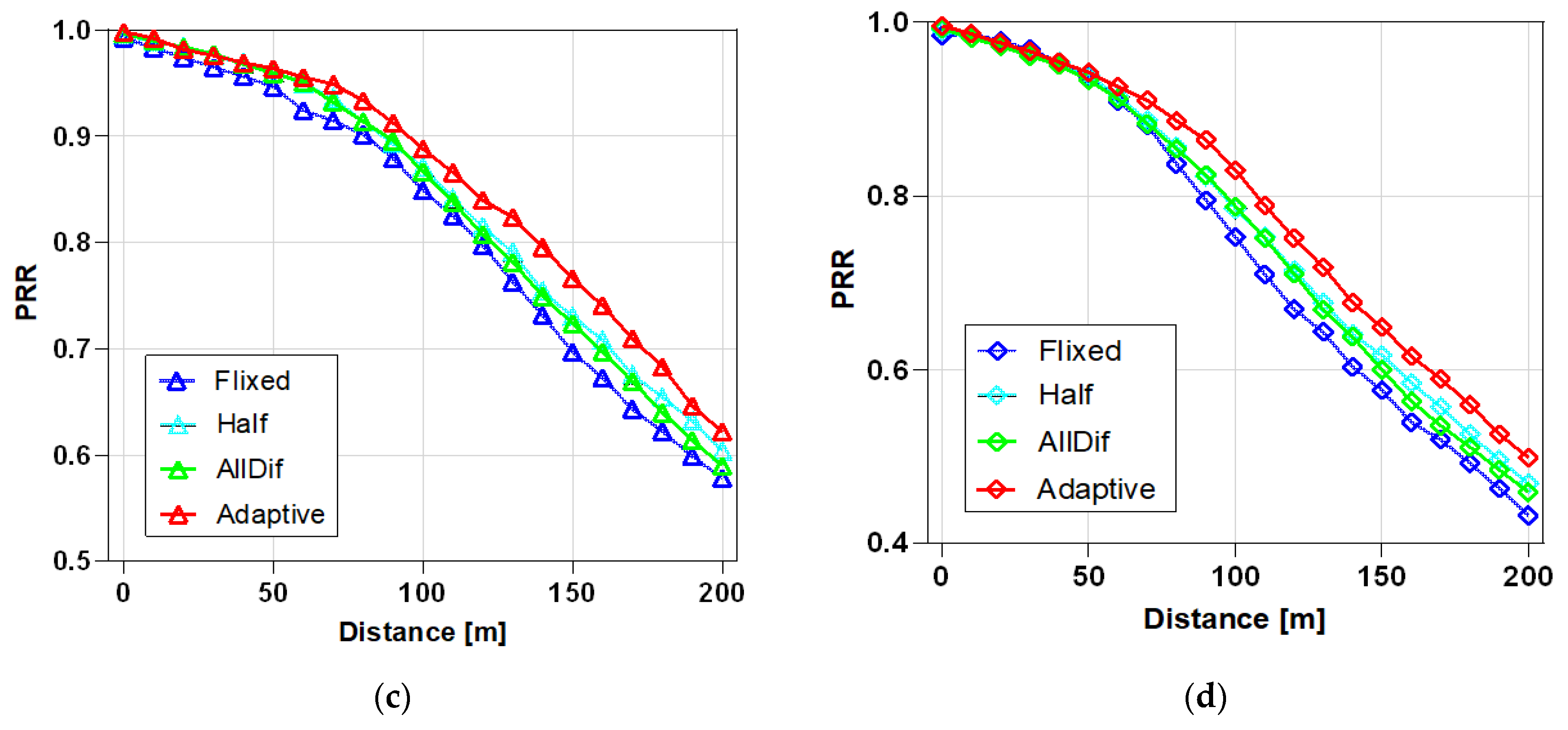
- The influence of vehicle speed on communication performance is analysed, considering the packet reception rate (PRR) and collision ratio (CR), especially in NR-V2X scenarios where vehicles and infrastructure coexist.
- An adaptive vehicle speed scheme based on the zone congestion level (CL) and inter-vehicle distance level (DL) is established to improve traffic efficiency and communication performance.
- The effectiveness of the adaptive vehicle speed in improving performance metrics is demonstrated.
2. Related Work
3. Overview of Technologies
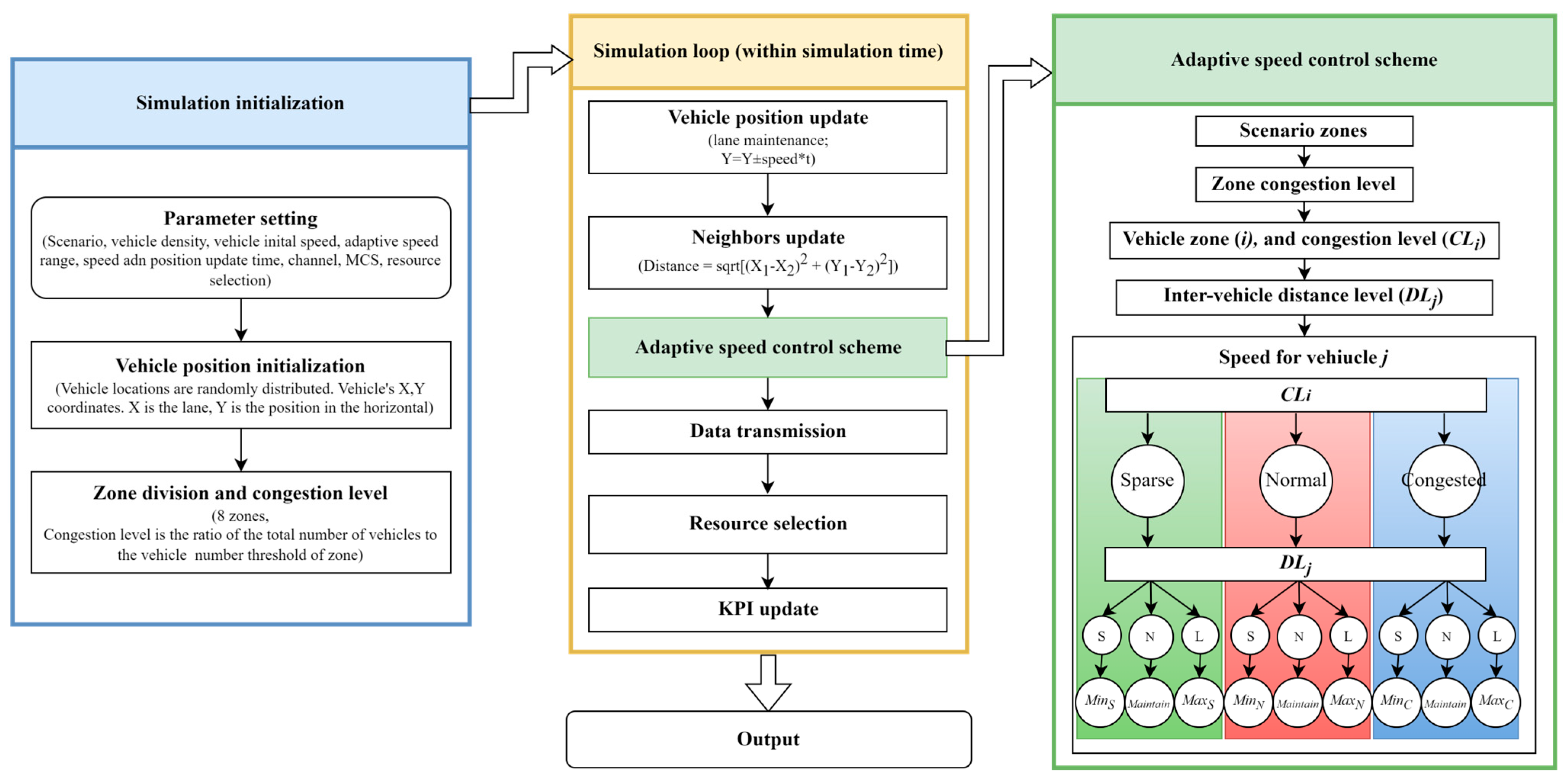
4. Adaptive Speed Scheme Based on Zone Congestion Level and Inter-Vehicle Distance Level
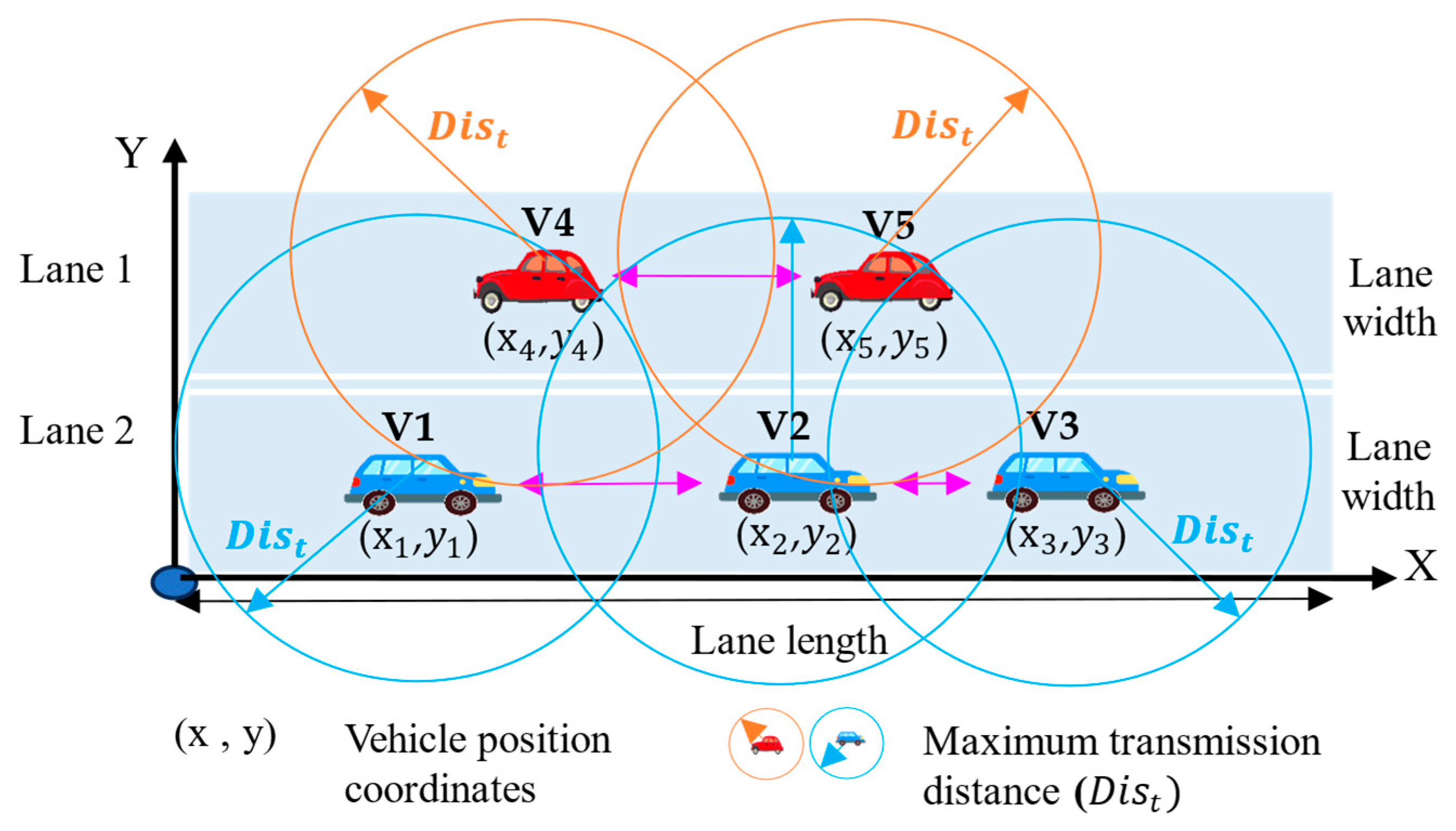
4.1. Zone Division and Congestion Level in Each Zone
4.2. Inter-Vehicle Distance Level
4.3. Adaptive Speed Based on Congestion Level and Inter-Vehicle Distance
| Algorithm 1: Scenario zone division and congestion level | ||
| 1. | Scenario zones | |
| 2. | 🡠 Road length. | |
| 3. | 🡠 Number of vehicles. | |
| 4. | 🡠 Number of zones in each direction. | |
| 5. | for = | |
| 6. | Follow Equations (4) and (5) | |
| 7. | 🡠 Right boundary of the th zone | |
| 8. | 🡠 Left boundary of the th zone. | |
| 9. | end | |
| 10. | Congestion level () | |
| 11. | 🡠 Safe distance. | |
| 12. | = | 🡠 Threshold for the number of vehicles in zone. |
| 13. | Follow Equation (6) to obtain | |
| 14. | 🡠 Number of vehicles in th zone. | |
| 15. | 🡠 Vehicle ratio for the th zone. | |
| 16. | = | |
| 17. | 🡠 Congestion level of the th zone. | |
| 18. | 🡠 Tolerance for zone congestion level. | |
| 19. | if 0 | |
| 20. | is sparse | |
| 21. | elseif 0 and | |
| 22. | is normal | |
| 23. | else | |
| 24. | is congested | |
| 25. | end | |
| Algorithm 2: Vehicle zone and inter-distance level | ||
| 1. | Vehicle zone | |
| 2. | , | 🡠 X and Y coordinate of the vehicle. |
| 3. | 🡠 Zone in which vehicle is located. | |
| 4. | if [, ] | |
| 5. | = i; | |
| 6. | end | |
| 7. | Inter-vehicle distance level () | |
| 8. | , | 🡠 Current vehicle, vehicle ahead of . |
| 9. | , | 🡠 Safe distance and tolerance for inter-distance level. |
| 10. | 🡠 Inter-vehicle distance between and in the same lane. | |
| 11. | = | |
| 12. | 🡠 Inter-distance level of . | |
| 13. | if ( − ) | |
| 14. | is large | |
| 15. | elseif | |
| 16. | is normal | |
| 17. | elseif ( − ) (−) | |
| 18. | is small | |
| 19. | end | |
| Algorithm 3: Adaptive speed based on and | ||
| 1. | Speed for | |
| 2. | 🡠 High speed for the sparse zones. | |
| 3. | 🡠 Low speed for the sparse zones. | |
| 4. | 🡠 High speed for the normal zones. | |
| 5. | 🡠 Low speed for the normal zones. | |
| 6. | 🡠 High speed for the congested zones. | |
| 7. | 🡠 Low speed for the congested zones. | |
| 8. | 🡠 CL of the zone in which the vehicle is located. | |
| 9. | 🡠 Inter-distance level of | |
| 10. | 🡠 Speed for . | |
| 11. | if is sparse or (normal) or [congested] | |
| 12. | if is large | |
| 13. | = or () or []; | |
| 14. | elseif is normal | |
| 15. | = maintain current speed; | |
| 16. | elseif is small | |
| 17. | = or () or []; | |
| 18. | end | |
| 19. | end | |
5. Simulation Setting and Results
5.1. Impact of Vehicle Speed
5.2. Performance Comparison between Conventional and Adaptive Speed Schemes
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- 3rd Generation Partnership Project. Study on Evaluation Methodology of New Vehicle-to-Everything (V2X) Use Cases for LTE and NR; 3GPP TR 37.885 V15.3.0; 3GPP Support Office: Valbonne, France, 2019. [Google Scholar]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network; NR; NR and NG-RAN Overall Description; Stage 2; 3GPP TS 38.300 V 17.4.0; 3GPP Support Office: Valbonne, France, 2023. [Google Scholar]
- ETSI Standard EN 302 637-2; Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service. ETSI: Valbonne, France, 2014.
- ETSI Standard EN 302 637-3; Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service. ETSI: Valbonne, France, 2014.
- 3rd Generation Partnership Project. Enhancement of 3GPP Support for V2X Scenarios; Stage 1; 3GPP TS 22.186 V17.0.0; 3GPP Support Office: Valbonne, France, 2022. [Google Scholar]
- Brambilla, M.; Combi, L.; Matera, A.; Tagliaferri, D.; Nicoli, M.; Spagnolini, U. Sensor-Aided V2X Beam Tracking for Connected Automated Driving: Distributed Architecture and Processing Algorithms. Sensors 2020, 20, 3573. [Google Scholar] [CrossRef] [PubMed]
- Bagheri, H.; Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Pesch, D.; Moessner, K.; Xiao, P. 5G NR-V2X: Toward Connected and Cooperative Autonomous Driving. IEEE Commun. Stand. Mag. 2021, 5, 48–54. [Google Scholar] [CrossRef]
- Cinque, E.; Valentini, F.; Persia, A.; Chiocchio, S.; Santucci, F.; Pratesi, M. V2X Communication Technologies and Service Requirements for Connected and Autonomous Driving. In Proceedings of the 2020 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 18–20 November 2020; pp. 1–6. [Google Scholar]
- Kutila, M.; Pyykonen, P.; Huang, Q.; Deng, W.; Lei, W.; Pollakis, E. C-V2X Supported Automated Driving. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–5. [Google Scholar]
- Boubakri, A.; Gammar, S.M. Intra-platoon communication in autonomous vehicle: A survey. In Proceedings of the 2020 9th IFIP International Conference on Performance Evaluation and Modeling in Wireless Networks (PEMWN), Berlin, Germany, 1–3 December 2020; pp. 1–6. [Google Scholar]
- Alalewi, A.; Dayoub, I.; Cherkaoui, S. On 5G-V2X Use Cases and Enabling Technologies: A Comprehensive Survey. IEEE Access 2021, 9, 107710–107737. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative Adaptive Cruise Control in Real Traffic Situations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 296–305. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Barth, M.J. A Review on Cooperative Adaptive Cruise Control (CACC) Systems: Architectures, Controls, and Applications. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2884–2891. [Google Scholar]
- Garcia, M.H.C.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; Şahin, T.; Kousaridas, A. A tutorial on 5G NR V2X communications. IEEE Commun. Surv. Tutor. 2021, 23, 1972–2026. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, W.; Chen, J.; Wang, W. Evolutionary V2X Technologies Toward the Internet of Vehicles: Challenges and Op-portunities. Proc. IEEE 2020, 108, 308–323. [Google Scholar] [CrossRef]
- Soto, I.; Calderon, M.; Amador, O.; Urueña, M. A Survey on Road Safety and Traffic Efficiency Vehicular Applications Based on C-V2X Technologies. Veh. Commun. 2022, 33, 100428. [Google Scholar] [CrossRef]
- MacHardy, Z.; Khan, A.; Obana, K.; Iwashina, S. V2X Access Technologies: Regulation, Research, and Remaining Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 1858–1877. [Google Scholar] [CrossRef]
- Wang, J.; Shao, Y.; Ge, Y.; Yu, R. A Survey of Vehicle to Everything (V2X) Testing. Sensors 2019, 19, 334. [Google Scholar] [CrossRef]
- Ganesan, K.; Lohr, J.; Mallick, P.B.; Kunz, A.; Kuchibhotla, R. NR Sidelink Design Overview for Advanced V2X Service. IEEE Internet Things Mag. 2020, 3, 26–30. [Google Scholar] [CrossRef]
- Wiseman, Y. Autonomous vehicles will spur moving budget from railroads to roads. Int. J. Intell. Unmanned Syst. 2024, 12, 19–31. [Google Scholar] [CrossRef]
- Dey, K.C.; Yan, L.; Wang, X.; Wang, Y.; Shen, H.; Chowdhury, M.; Yu, L.; Qiu, C.; Soundararaj, V. A Review of Communi-cation, Driver Characteristics, and Controls Aspects of Cooperative Adaptive Cruise Control (CACC). IEEE Trans. Intell. Transp. Syst. 2016, 17, 491–509. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Wang, W.; Xing, L.; Liu, S.; Wei, X. Evaluation of the Impacts of Cooperative Adaptive Cruise Control on Reducing Rear-End Collision Risks on Freeways. Accid. Anal. Prev. 2017, 98, 87–95. [Google Scholar] [CrossRef] [PubMed]
- Summala, H. Brake reaction times and driver behavior analysis. Transp. Hum. Factors 2000, 2, 217–226. [Google Scholar] [CrossRef]
- Choudhury, A.; Maszczyk, T.; Asif, M.T.; Mitrovic, N.; Math, C.B.; Li, H.; Dauwels, J. An Integrated V2X Simulator with Applications in Vehicle Platooning. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1017–1022. [Google Scholar]
- Aznar-Poveda, J.; Egea-Lopez, E.; Garcia-Sanchez, A.-J.; Garcia-Haro, J. Advisory Speed Estimation for an Improved V2X Communications Awareness in Winding Roads. In Proceedings of the 2020 22nd International Conference on Transparent Optical Networks (ICTON), Bari, Italy, 19–23 July 2020; pp. 1–4. [Google Scholar]
- Li, Y.; Chen, W.; Peeta, S.; Wang, Y. Platoon Control of Connected Multi-Vehicle Systems Under V2X Communications: De-sign and Experiments. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1891–1902. [Google Scholar] [CrossRef]
- Yan, S.; Wang, J.; Wang, J. Coordinated Control of Vehicle Lane Change and Speed at Intersection under V2X. In Proceedings of the 2018 3rd International Conference on Mechanical, Control and Computer Engineering (ICMCCE), Huhhot, China, 14–16 September 2018; pp. 69–73. [Google Scholar]
- Zhou, S.; Wu, Q.; Tan, G.; Yang, D.; Ni, B. On Performance of Cooperative V2X Communication with Vehicular Platoon Systems. In Proceedings of the 2021 IEEE 23rd Int Conf on High Performance Computing & Communications; 7th Int Conf on Data Science & Systems; 19th Int Conf on Smart City; 7th Int Conf on Dependability in Sensor, Cloud & Big Data Systems & Application (HPCC/DSS/SmartCity/DependSys), Haikou, China, 20–22 December 2021; pp. 955–960. [Google Scholar]
- Wang, P.; Di, B.; Zhang, H.; Bian, K.; Song, L. Platoon cooperation in cellular V2X networks for 5G and beyond. IEEE Trans. Wirel. Commun. 2019, 18, 3919–3932. [Google Scholar] [CrossRef]
- Nardini, G.; Virdis, A.; Campolo, C.; Molinaro, A.; Stea, G. Cellular-V2X Communications for Platooning: Design and Evalu-ation. Sensors 2018, 18, 1527. [Google Scholar] [CrossRef]
- Cao, L.; Roy, S.; Yin, H. Resource Allocation in 5G Platoon Communication: Modeling, Analysis and Optimization. IEEE Trans. Veh. Technol. 2023, 72, 5035–5048. [Google Scholar] [CrossRef]
- Yin, J.; Hwang, S.-H. Adaptive Sensing-Based Semipersistent Scheduling with Channel-State-Information-Aided Reselection Probability for LTE-V2V. ICT Express 2022, 8, 296–301. [Google Scholar] [CrossRef]
- Lei, L.; Liu, T.; Zheng, K.; Hanzo, L. Deep reinforcement learning aided platoon control relying on V2X information. IEEE Trans. Veh. Technol. 2022, 71, 5811–5826. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. NR; Physical Channels and Modulation; 3GPP TS 38.211 V18.2.0; 3GPP Support Office: Valbonne, France, 2024. [Google Scholar]
- 3rd Generation Partnership Project. NR; Requirements for Support of Radio Resource Management; 3GPP TS 38.133 V18.3.0; 3GPP Support Office: Valbonne, France, 2023. [Google Scholar]
- 3rd Generation Partnership Project. NR; Physical Layer Procedures for Data; 3GPP TS 38.214 V16.7.0; 3GPP Support Office: Valbonne, France, 2021. [Google Scholar]
- 3rd Generation Partnership Project. 2X Services Based on NR; User Equipment (UE) Radio Transmission and Reception; 3GPP TR 38.886 V16.3.0; 3GPP Support Office: Valbonne, France, 2023. [Google Scholar]
- 3rd Generation Partnership Project. Overall Description of Radio Access Network (RAN) Aspects for Vehicle-to-Everything (V2X) Based on LTE and NR; 3GPP TR 37.985 V17.1.1; 3GPP Support Office: Valbonne, France, 2022. [Google Scholar]
- 3rd Generation Partnership Project. NR; Physical Layer Measurements; 3GPP TS 38.215 V17.3.0; 3GPP Support Office: Valbonne, France, 2023. [Google Scholar]
- 3rd Generation Partnership Project. Study on Channel Model for Frequencies from 0.5 to 100 GHz; 3GPP TR 38.901 V18.0.0; 3GPP Support Office: Valbonne, France, 2024. [Google Scholar]
- Todisco, V.; Bartoletti, S.; Campolo, C.; Molinaro, A.; Berthet, A.O.; Bazzi, A. Performance analysis of sidelink 5G-V2X mode 2 through an open-source simulator. IEEE Access 2021, 9, 145648–145661. [Google Scholar] [CrossRef]
- 3rd Generation Partnership Project. Study on Scenarios and Requirements for Next Generation Access Technologies; 3GPP TR 38.913 V16.0.0; 3GPP Support Office: Valbonne, France, 2020. [Google Scholar]
- 3rd Generation Partnership Project. User Equipment (UE) Radio Transmission and Reception; Part 1: Range 1 Standalone; 3GPP TS 38.101 V17.3.0; 3GPP Support Office: Valbonne, France, 2021. [Google Scholar]
- 3rd Generation Partnership Project. NR; Study on NR Vehicle-to-Everything (V2X); 3GPP TS 38.885 V16.0.0; 3GPP Support Office: Valbonne, France, 2019. [Google Scholar]
- 3rd Generation Partnership Project. Service Requirements for V2X Services; Stage 1; 3GPP TS 38.101 V17.3.0; 3GPP Support Office: Valbonne, France, 2022. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Scenario (Highway) | |
| Lanes | One lane in each direction [42] |
| Length of road () | 2000 m [42] |
| Width () | 4 m [42] |
| Vehicle density () | 50, 100, 150, and 200 vehicles/km [41] |
| Number of vehicles | * () [41] |
| Vehicle initial speed | 60 km/h [44,45] |
| Physical layer | |
| Simulation time () | 50 s [41] |
| Channels | ITS bands at 5.9 GHz [41] |
| Bandwidth | 10 MHz [41] |
| Antenna gain () | 3 dB [41] |
| Noise figure | 9 dB [41] |
| Channel model | WINNER+, Scenario B1 [41] |
| Transmission power () | 23 dBm [43] |
| Modulation and coding scheme (MCS) | 3 (QPSK, ) [34] |
| Subcarrier spacing (SCS) | 15 kHz [36] |
| Subchannel size | 10 RBs [41] |
| Resource allocation(SB-SPS) | |
| Resource reservation interval (RRI) | 100 ms [41] |
| Sensing duration () | 1100 ms [41] |
| Resource sensing threshold () | −110 dBm [41] |
| Resource keeping probability () | 0.4 [41] |
| Adaptive speed | |
| Position and speed update interval (, ) | 100 ms [41] |
| Safe distance () | 25 m [11] |
| High speed for sparse zones () | 100 km/h [44,45] |
| Low speed for sparse zones () | 50 km/h [44,45] |
| High speed for normal zones () | 80 km/h [44,45] |
| Low speed for normal zones () | 40 km/h [44,45] |
| High speed for congested zones () | 70 km/h [44,45] |
| Low speed for congested zones ( | 30 km/h [44,45] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Hwang, S.-H. Adaptive Speed Control Scheme Based on Congestion Level and Inter-Vehicle Distance. Electronics 2024, 13, 2678. https://doi.org/10.3390/electronics13132678
Yin J, Hwang S-H. Adaptive Speed Control Scheme Based on Congestion Level and Inter-Vehicle Distance. Electronics. 2024; 13(13):2678. https://doi.org/10.3390/electronics13132678
Chicago/Turabian StyleYin, Jicheng, and Seung-Hoon Hwang. 2024. "Adaptive Speed Control Scheme Based on Congestion Level and Inter-Vehicle Distance" Electronics 13, no. 13: 2678. https://doi.org/10.3390/electronics13132678
APA StyleYin, J., & Hwang, S.-H. (2024). Adaptive Speed Control Scheme Based on Congestion Level and Inter-Vehicle Distance. Electronics, 13(13), 2678. https://doi.org/10.3390/electronics13132678