Abstract
This paper presents an alternative method to solve the control problem of an uncertain nonlinear system in strict-feedback form with a time delay. Instead of using Lyapunov–Krasovskii functionals, ordinary Lyapunov functionals are used to design the controllers. In order to address the completely unknown uncertainties of the system, including the unmodeled dynamics, time-delay nonlinearities, and external disturbances, command filters are applied to reconstruct the estimations of such uncertainties, and the negative feedback of these estimations can be used to reduce the influence of such uncertainties on the system. With the help of the backstepping technique and the Lyapunov stability criterion, it is proved that the system output tracks the target signal with a small error, and contrastive simulation results verify our method’s effectiveness.
1. Introduction
During the past decades, the backstepping technique has become a very popular design method in the nonlinear system control domain, and it has been extensively used in various nonlinear systems, especially strict-feedback systems; see [1,2,3,4] and the references therein. In the classical backstepping design procedure, the time derivatives of the tuning functions (or the virtual control functions) are needed to construct the final controller, which results in tremendous complexity in the control design. In order to overcome this disadvantage in backstepping, command-filtered backstepping [5] has emerged, and it uses command filters to estimate the time derivatives of the virtual control functions and avoids analytic computations. Therefore, the computational burden is greatly reduced in command-filtered backstepping. Subsequently, many command-filtered-backstepping-based control methods have been proposed for different types of nonlinear systems. To list a few, in [6], the authors combined a command-filtered technique and adaptive control and achieved a command-filtered adaptive backstepping control scheme for nonlinear systems in generalized-parameter strict-feedback form. The authors of [7] presented an immersion- and invariance-based command-filtered adaptive backstepping control method for vehicles with vertical take-off and landing. In [8], the authors investigated the consensus control problems of fixed-topology-based multi-agent systems by using a command-filtered backstepping technique and neural networks. In [9], the authors presented a novel command-filtered backstepping approach by using finite-time stability and backstepping with novel virtual control functions and improved error compensators, which further developed the advantages of command-filtered backstepping. From the above-mentioned results, we can conclude that regardless of if one is using a dynamic surface technique without an error compensator or a command-filtered approach with an error compensator, the main function of the command filter is to estimate the time derivative of virtual control functions, and thus, the problem of the explosion of terms is avoided.
In recent years, many command-filter-based control methods have been proposed. For example, a new set of backstepping control algorithms with low complexity were presented in [10] for a class of strict-feedback systems by using command filters with time-varying gains and compensators based on “softening” sign functions. In [11], the authors studied a gain-varying backstepping strategy for a class of systems with external disturbances in which novel gain-varying functions were used to improve the systems’ anti-disturbance capabilities, and command filters with a gain-varying error compensation mechanism were applied to avoid the differential explosion problem. A neural-network-based command-filtered adaptive tracking control scheme was designed in [12] for a class of input-constrained nonlinear systems in the discrete-time domain by introducing a command-filtering technique with a filtering error compensation mechanism and radial-basis-function-based neural networks. The adaptive fixed-time control problem for nonlinear systems in a strict-feedback form was addressed in [13] via fixed-time control and a finite-time command filter; the system output could track the target signal from any initial conditions and in a finite time, and the convergence time had no connection with the system’s initial conditions. A modified command-filter-based backstepping tracking control scheme was proposed in [14] for a class of uncertain nonlinear systems with input saturation by using a fuzzy logic system, convex optimization method, adaptive control technique, and Lasalle invariant principle. Moreover, a novel piecewise continuous function was designed to solve the input saturation problem. The scaled consensus adaptive tracking control problem for a class of input-delayed multiagent systems with external disturbances and unknown mixed control gains was solved in [15] by using a neural-network-based state observer, a command-filtering technique with a filtering error compensation mechanism, the Lyapunov–Krasovskii functionals, and an approach based on the Nussbaum gain function. In [16], the authors handled the asymptotic tracking control of full-state constrained uncertain systems in nonstrict-feedback form by designing a command-filtered technology with a boundary estimation method and a significant nonlinear transformed function, and the tracking error asymptotically converged to zero with all the other variables being bounded and constrained in predefined asymmetric sets under the proposed control method. A command-filtered finite-time robust backstepping approach was proposed in [17] for a class of flexible-joint robots with only position feedback by applying disturbance observers (they were used to estimate the velocity information and the mismatched or matched disturbances), a finite-time backstepping controller, and command filters. A command-filter-based practical finite-time backstepping technique was proposed in [18] for nonlinear systems with external disturbances, unknown control direction coefficients, and unmodeled dynamics by using novel command filters with practical finite-time convergence (they were used to construct the approximations of the system uncertainties), as well as a virtual control direction method (which solved the control problem resulting from unknown control direction coefficients).
Time delay, as a common phenomenon in engineering, environmental sciences, economics, etc, has long been attributed much importance in the fields of control science, environmental science, and economic regulation and control. The effect of a time delay on a system is very significant, since it may degrade the system’s control performance or, even worse, make the system unstable. Time delay is an important factor in mathematical economic models, and the study of dynamic economic systems with time delays is one of the frontier topics in the field of differential dynamics. Some economic phenomena cannot be described purely by ordinary differential equations because they are not as regular as mathematical expressions and often show a kind of time-lag phenomenon. Therefore, using time delay and perturbation can allow real economic systems to be described more effectively. For example, in nonlinear econometric models, the time delay not only affects the time and degree of the effectiveness of monetary policy but also determines whether the impact of monetary policy on macroeconomic operations is favorable to a large extent. If a monetary policy adopted to curb the development of an economic phenomenon can take effect in a relatively short period of time, then that monetary policy is beneficial to the operation of the macroeconomy. However, if a monetary policy takes a long time to take effect, the operation of the national economy is affected by other factors during this period, and the situation is completely different from that when the monetary policy is formulated, then that monetary policy may have an adverse impact on the operation of the macroeconomy. A well-known method to overcome the influence of time delay on a system is the Lyapunov–Krasovskii functional approach. For example, the authors of [19] solved the globally uniform asymptotic stabilization problem for nonlinear systems in feedback form with an input time delay based on the Lyapunov–Krasovskii functional. In [20,21], the authors used adaptive fuzzy control and the Lyapunov–Krasovskii approach to solve the control problem of time-delayed nonlinear systems. In [22,23], the authors considered the tracking control problem for two different time-delayed nonlinear systems by using an adaptive neural network control method and the Lyapunov–Krasovskii approach. The global asymptotic stabilization problem was studied by the authors in [24] for a class of stochastic nonlinear varying-time-delay systems under weaker conditions on nonlinear functions based on the stochastic time-delayed system stability criterion, the Lyapunov–Krasovskii functional, and global asymptotic stability in probability. The problem of delay-dependent memory filtering for continuous-time semi-Markovian jump linear systems with a time-varying delay was investigated in [25] by using a semi-Markovian Lyapunov–Krasovskii formulation of the scaled small-gain problem combined with a projection lemma, an approximation technique, and linear matrix inequalities. An adaptive dynamic-surface fuzzy control method was presented in [26] for a class of state-constrained nonstrict-feedback time-delayed systems with external disturbances and unknown control directions based on the Nussbaum gain technique, the Lyapunov–Krasovskii functional, the adaptive fuzzy backstepping method, and a dynamic-surface technique. The asymptotic stabilization control problem was studied by the authors of [27] for an actuator-saturated nonlinear system with time-delayed states by designing an event-triggered switched control strategy and linear matrix inequalities based on the delay-dependent Lyapunov–Krasovskii functional, and the proposed control method could reduce the burden of networks’ data transmission while ensuring the stability of the closed-loop system with actuator saturation. The output-feedback control problem for a class of nonlinear time-delayed systems with unmeasured system states was considered by the authors of [28], and novel control-gain-based Lyapunov–Krasovkii functionals were designed in a controller without a time delay. The adaptive fixed-time disturbance rejection control problem was investigated in [29] for a class of time-delayed nonlinear systems subject to event-triggered and quantized input signals by using a disturbance observer, the event-triggered backstepping technique with fuzzy logic systems, and the Lyapunov–Krasovskii functional method. In [30], the fixed-time tracking control problem was studied for high-order stochastic time-delayed nonlinear systems, and an improved Lyapunov–Krasovskii function ws designed, which not only compensated for the time-delay term but also solved the difficulties caused by the high-order term. It can be concluded from the aforementioned results that the Lyapunov–Krasovskii approach is indeed a good method for dealing with systems with a time delay, but in most Lyapunov–Krasovskii-functional-based methods, the time-delay nonlinearities are assumed to be less than or equal to some known functions, which greatly limits the application of this method.
In this paper, we consider the control problem for a class of strict-feedback uncertain nonlinear systems with multiple time-varying time delays in which unmodeled dynamics, external disturbances, and unknown time-delay nonlinearities are all taken into account. Without using Lyapunov–Krasovskii functionals and universal approximators, such as fuzzy logic systems or neural networks (NNs), we present a new and simple control scheme for such a complex control system on account of ordinary Lyapunov functionals, a backstepping technique, and command filters. In our approach, the command filters are used to obtain the estimations of the time derivatives of some system signals; then, these estimations can be applied to reconstruct the approximations of the system uncertainties, including the unmodeled system dynamics, external disturbances, and unknown time-delay nonlinearities. In the end, the negative feedback of such approximations can be used to reduce the influence of uncertainties. This paper’s contributions are the following: (i) command filters are primarily designed to handle unmodeled system dynamics, external disturbances, and unknown time-delay nonlinearities; (ii) the structure of our controller is simpler than that of an adaptive fuzzy controller or adaptive NN controller.
The rest of our work is organized as follows. The problem formulation and preliminaries are given in Section 2, and the design procedure for the improved command-filter-based backstepping controller is presented in Section 3. A stability analysis of the closed-loop system is described in Section 4. Section 5 shows the simulation results, and followed by Section 6, which concludes this paper.
2. Problem Formulation and Preliminaries
Let us consider a system with a time delay and disturbances,
where , and , , and are the system state, control input, and system output, respectively. For , represents the unmodeled dynamics, denotes the time-delay nonlinearity, () is the control direction function, and denotes the external disturbance. For , , and is an unknown time-varying time delay of a system state.
Assumption 1.
and are continuous and bounded.
Assumption 2.
Functions , , and are smooth functions.
Assumption 3.
The unknown time delays are bounded by an unknown constant, i.e.,
For a known signal , the following command filter is adopted to estimate by using :
where is a positive constant.
3. Improved Command-Filter-Based Backstepping Controller Design
The design procedure for our improved command-filter-based backstepping controller for nonlinear systems (1) is demonstrated step by step in this section.
Step 1. Let and ; considering the Lyapunov function candidate , then, the time derivative of can be given by
Here, it is easy to find that an ideal virtual control function should be provided functions , and are all known. However, in the studied system, functions , and are unknown; thus, the ideal virtual control function cannot be implemented.
In order to design , some frequently used methods are worth mentioning here. (1) In order to deal with the time-delay nonlinearity , most existing results use the Lyapunov–Krasovskii functional approach with some known inequalities on ; see [19,20,21,22,23] and the references therein. (2) To handle the unknown system nonlinearities and external disturbances, many works impose some known inequality or equality constraints on and , such as in [31,32]; some other results use a universal approximator such as a fuzzy logic system [33] or neural networks [34], to obtain the estimations of and . Inequality or equality constraints cannot be used here, since such constraints of and are not allowed in our studied system. As for universal-approximator-based methods, the controllers are too complicated to be implemented because at least n universal approximators are needed for an n-dimensional uncertain system. In this article, we will show a new and simple way to deal with the unknown functions , and without using the Lyapunov–Krasovskii functionals, universal approximators, or some known inequality or equality constraints.
Consider the time derivative of ,
It is true that
which means that the unknown system nonlinearity () can be replaced by using . The command filter concept in Section 2 will be applied to obtain the estimation of , and such a command filter (command filter 1) is defined as follows:
where , . The error between and is defined by
Equation (8) indicates that the unknown system nonlinearity () is approximated by with error . Combining (3) with (8), one has
Then, one can design the virtual control function as
where .
Step 2. Let and ; then, one has
Note that in the original command-filter-based backstepping, the command filter is used to estimate such that the calculation of the analytic expression of can be avoided. However, this still cannot address the uncertainties , and , since they are unknown. Considering the time derivative of , one has
and can be obtained with the following equation provided that is known and available.
Since the precise value of cannot be obtained, we use (15) to obtain the estimation of as follows:
where , . The error between and can be defined by
Equation (17) means that the uncertainty can be approximated by with error .
The virtual control function can be defined by
where .
Stepi (). Let and ; then, is obtained by
Using a similar procedure to that in (13)–(16) in Step 2, we have
where stands for the ith command-filter output, which is given below:
where , , and denotes the error between and , i.e., .
Step n. Let .
According to the method shown in the steps completed above, one has
where , . The estimation error is defined by
Then, one has
Here, a different approach is applied to design the controller u. Let and with ; the following equations hold:
Moreover, the unknown nonlinearity can be rewritten as
We design as
where .
Step Choosing the Lyapunov function candidate , is given by
The estimation of can be obtained by using
where , . The estimation error is defined by
Then, is designed as
and thus, the real controller is
4. Stability Analysis
Our main results are summarized by the following two theorems. The first theorem is given to show the boundedness of the filter errors , and the second one proves the convergence of the system tracking error.
Theorem 1.
Proof.
Let , and choosing , we have
where , , , and . Furthermore, it can be found that
which means that
Theorem 2.
The system tracking error converges to a neighborhood of the origin as .
Proof.
Then, one has
and is
The proof of Theorem 2 is complete. □
Remark 1.
In our improved command-filter-based backstepping method, the filter errors are not further addressed or compensated, which may affect the control precision. In the traditional command-filtered backstepping (CFB) technique, an error compensation mechanism is designed such that the control performance can be further improved, which motivates us to carry out future work on introducing the error compensation mechanism of CFB into our improved command-filter-based backstepping method.
Remark 2.
From (51) and (52), one can find that if and are assigned large values, then a will be large and will be small. Thus, the upper bound of the tracking error will be small. In practice, to reduce the tracking error, one can choose larger values of and . On the other hand, if and are too large, the controller input will be very large at system startup. This is not good for a control system, since it can generate a large system overshoot. Therefore, for a real system, the parameter-setting procedure is unavoidable.
Remark 3.
In the proposed command-filter-based backstepping control method, command filters are introduced to deal with the unknown system terms, and the only parameters that need to be designed are and , which means that, in total, parameters need to be set. In adaptive NN backstepping control schemes, such as that in [35], n neural networks are designed, which results in ( denotes the number of NN nodes of the ith NN, and stands for the number of the ith NN input) parameters that need to be assigned. Since NNs contain too many design parameters, the number of parameters in the adaptive NN backstepping controller is much greater than that in the proposed command-filter-based backstepping controller.
5. Simulation Results
Let us consider the following two-dimensional uncertain nonlinear system with a time delay and external disturbances:
where , , and the functions , , and are completely unknown. The initial conditions of system (53) are . In the simulation, we set
According to our proposed improved command-filter-based backstepping technique, the final controller and virtual controllers of system (53) can be designed as follows:
where , , , , , . Our controller parameters are , , , , , and .
According to [35], the adaptive NN backstepping (ANNB) controller, its virtual controller, and the adaptive laws are given by
where and for are design parameters, , and is the basis function vector. The ANNB controller parameters are , , , , and . Neural network has 7 nodes with centers at , with the widths being 2. Neural network has 14 nodes with centers at , and the widths are 4. The initial conditions of and are .
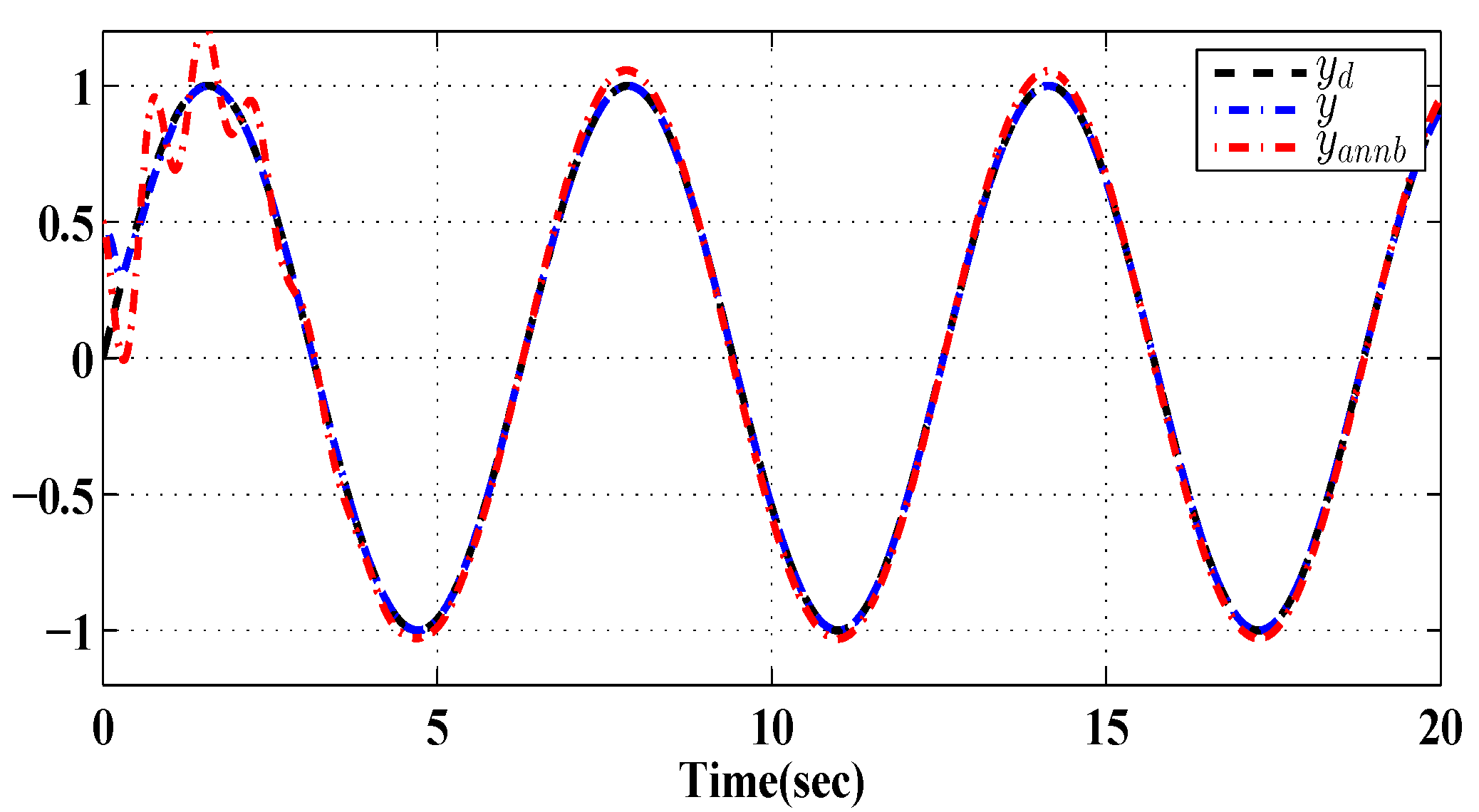
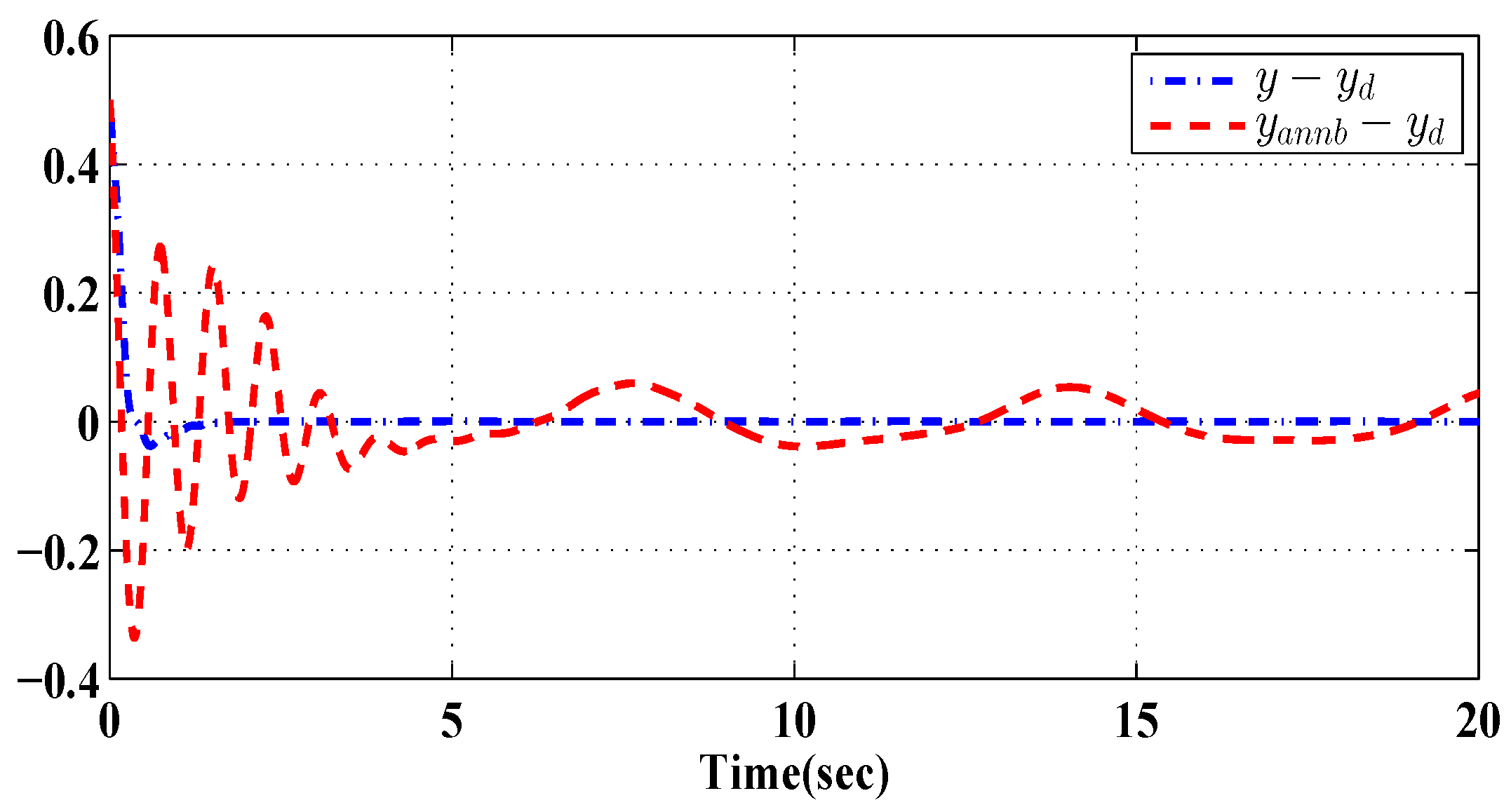
The sinusoidal signal () tracking control response of system (53) is obtained by using our proposed improved command-filter-based backstepping controller and the ANNB controller from [35]. The simulation results are shown in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7. Figure 1 and Figure 2 illustrate the tracking performance and tracking error when using the two control methods.
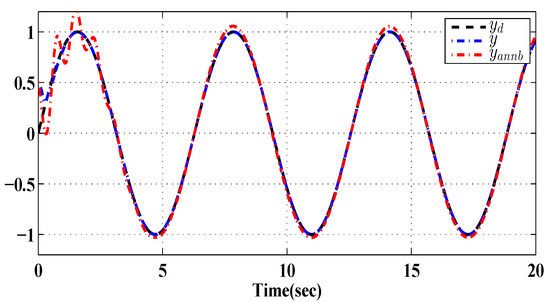
Figure 1.
Sinusoidal signal tracking response of system (53). y represents the system output of our proposed controller, and denotes the system output of the ANNB controller from [35].
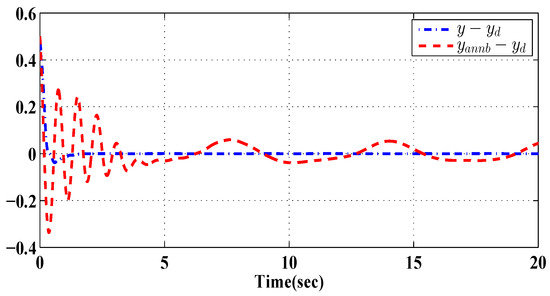
Figure 2.
Responses of the tracking errors. represents the tracking error with our proposed controller, and denotes the tracking error with the ANNB controller from [35].
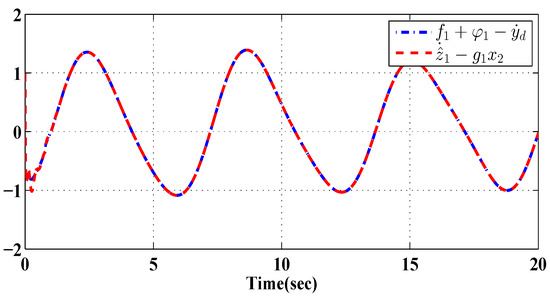
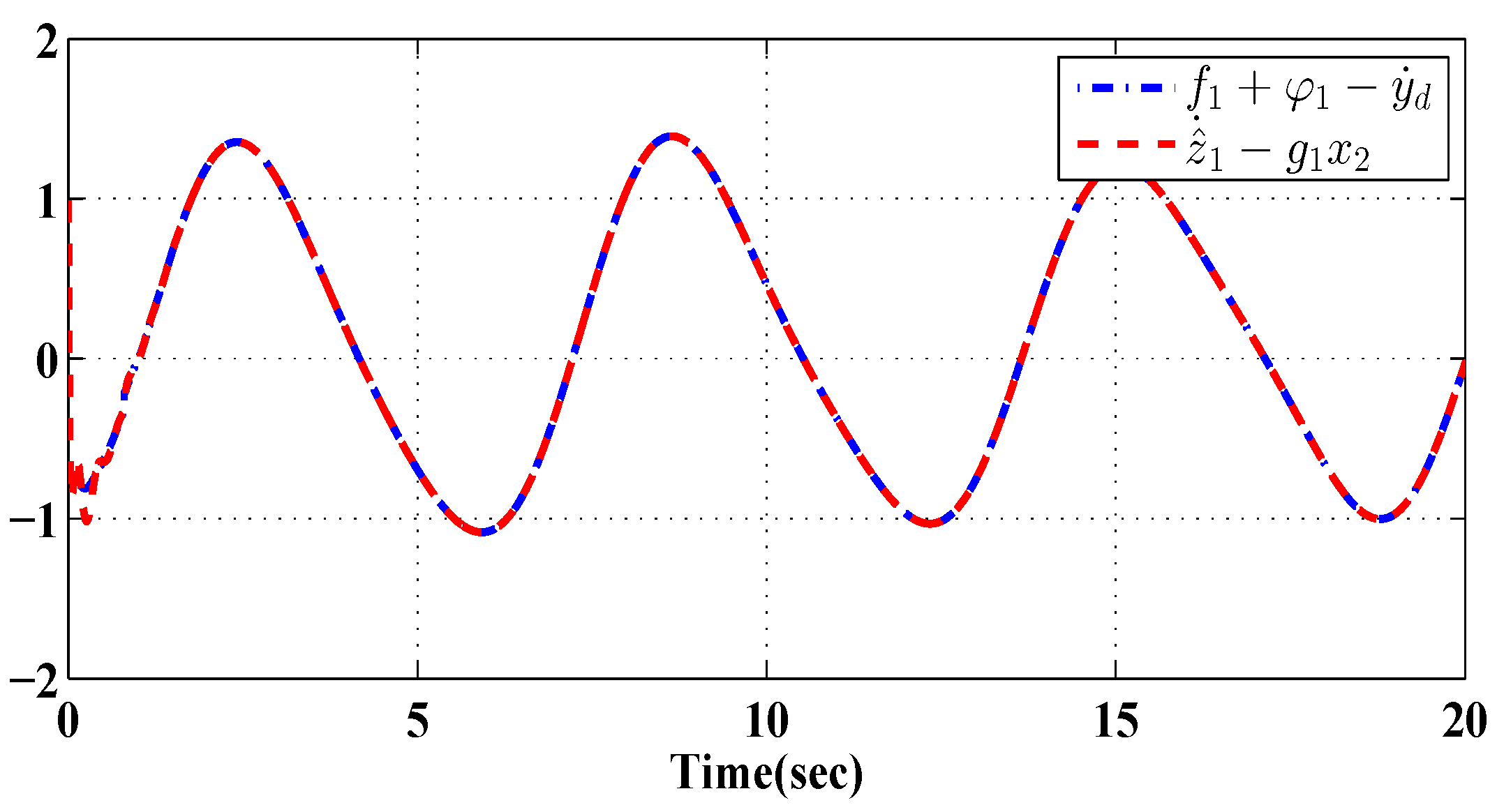
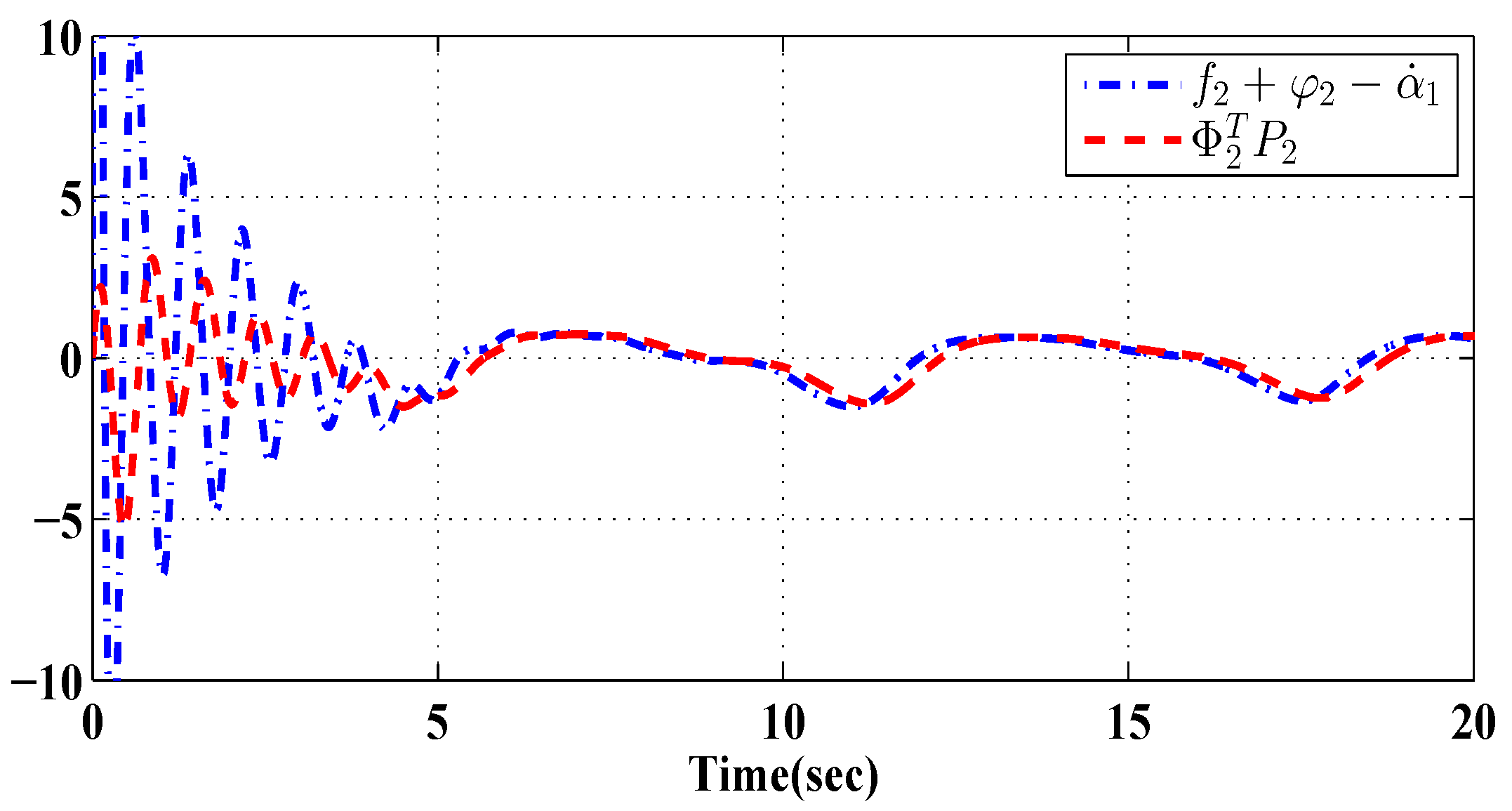
Figure 3.
Reconstruction of the system uncertainties by using our method.
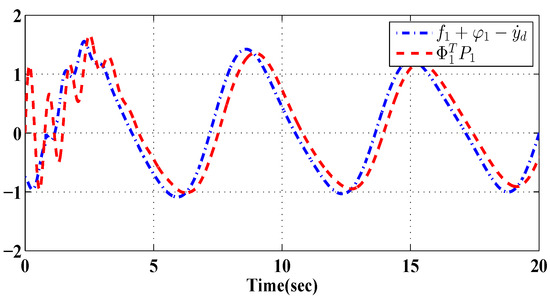
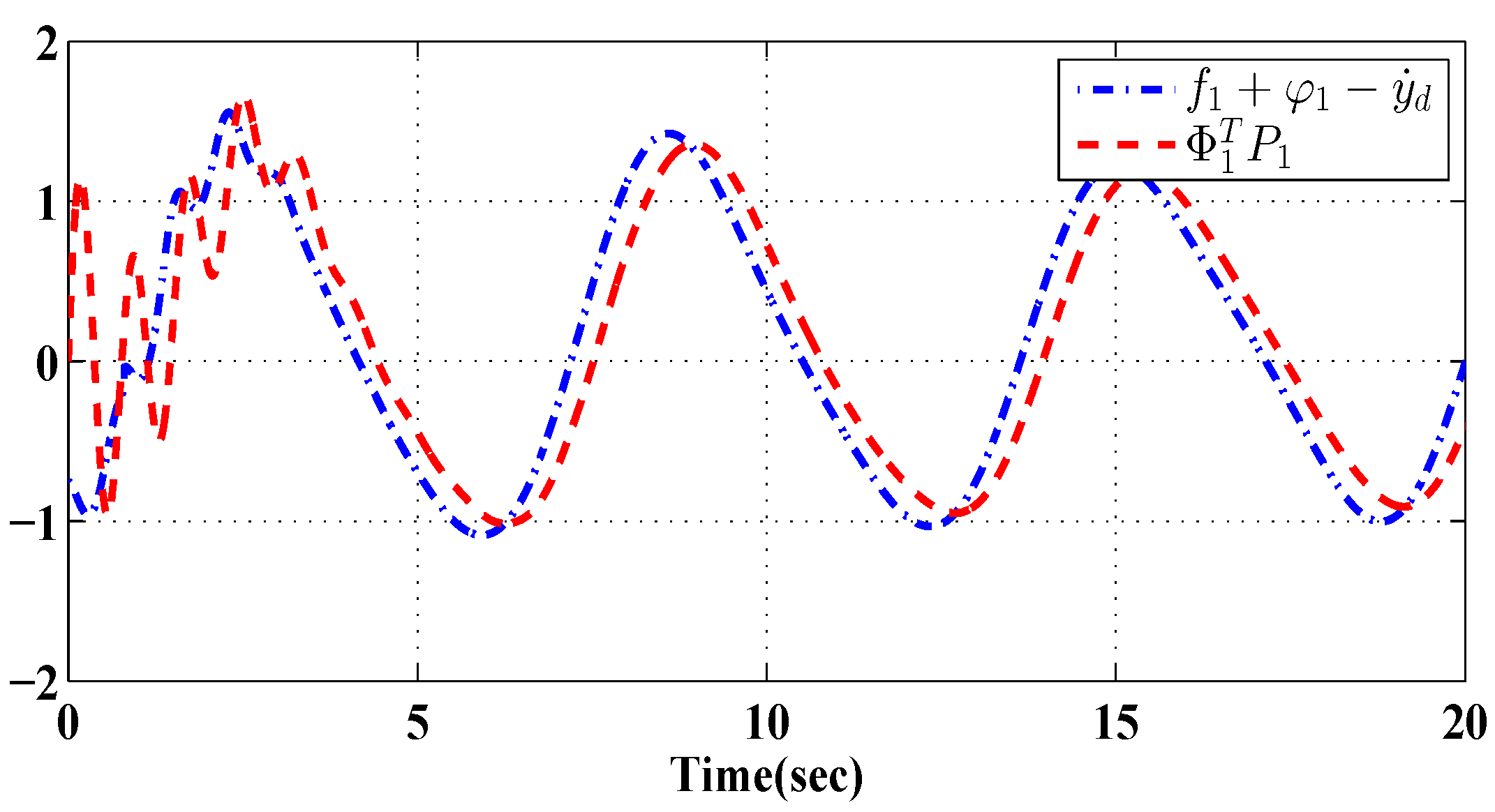
Figure 4.
NN approximation in [35].
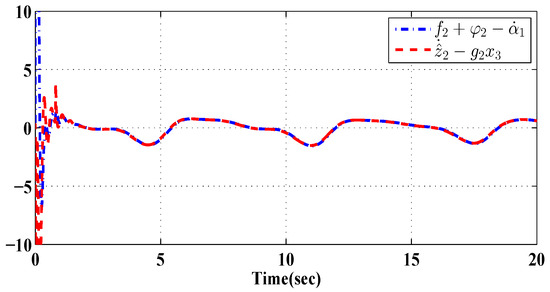
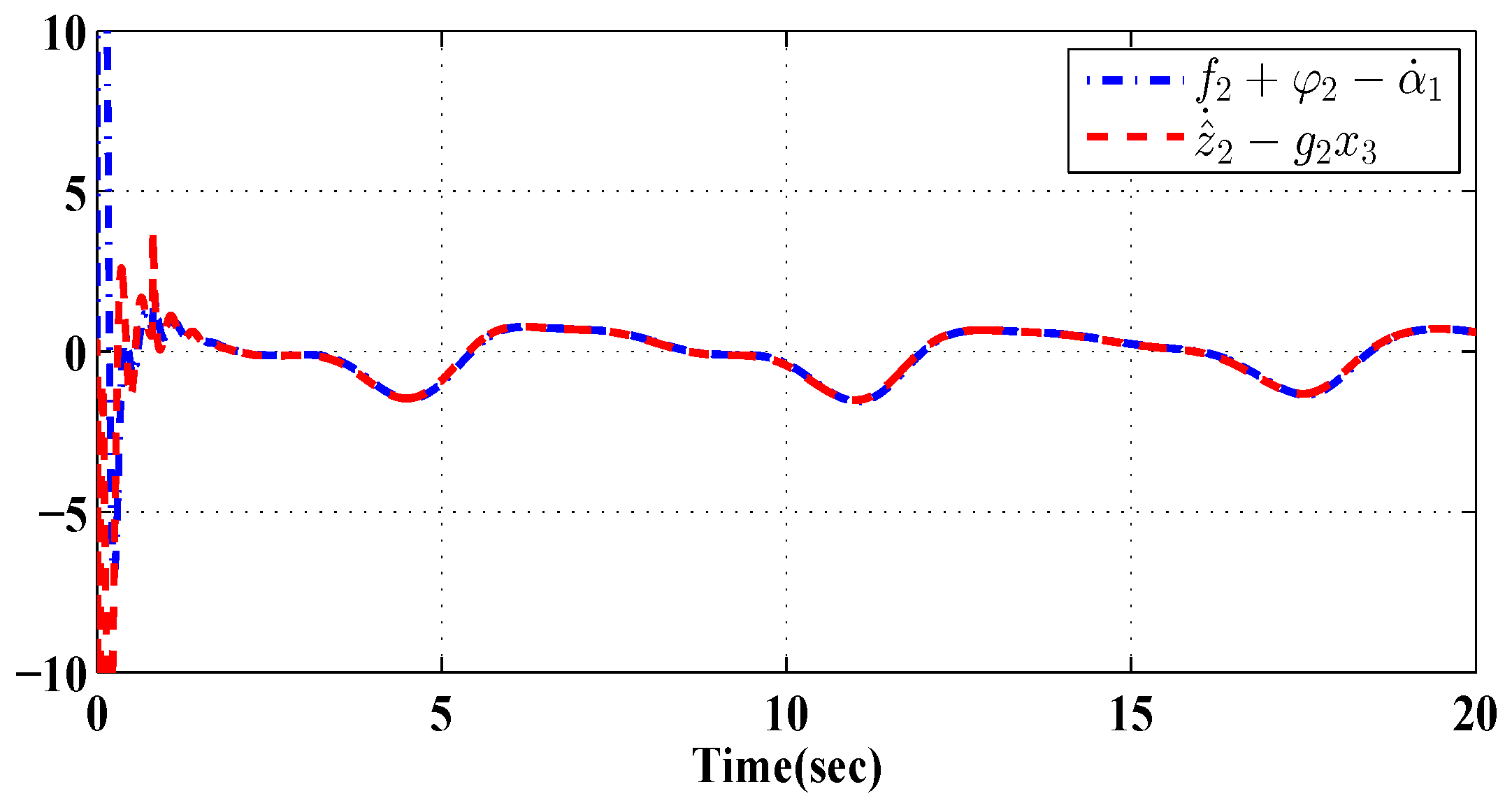
Figure 5.
Reconstruction of the system uncertainties by using our method.
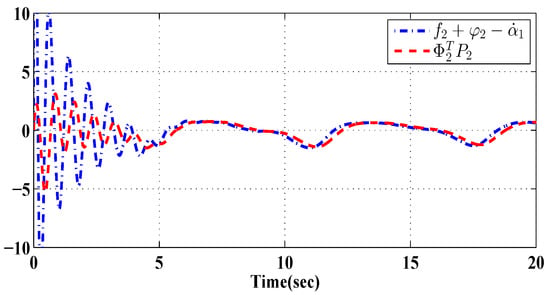
Figure 6.
NN approximation in [35].
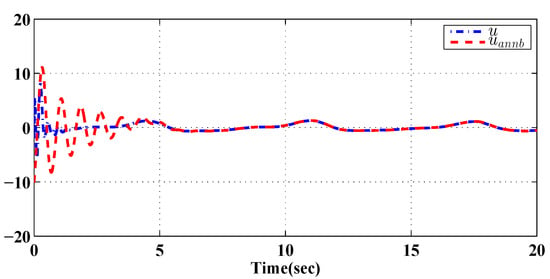
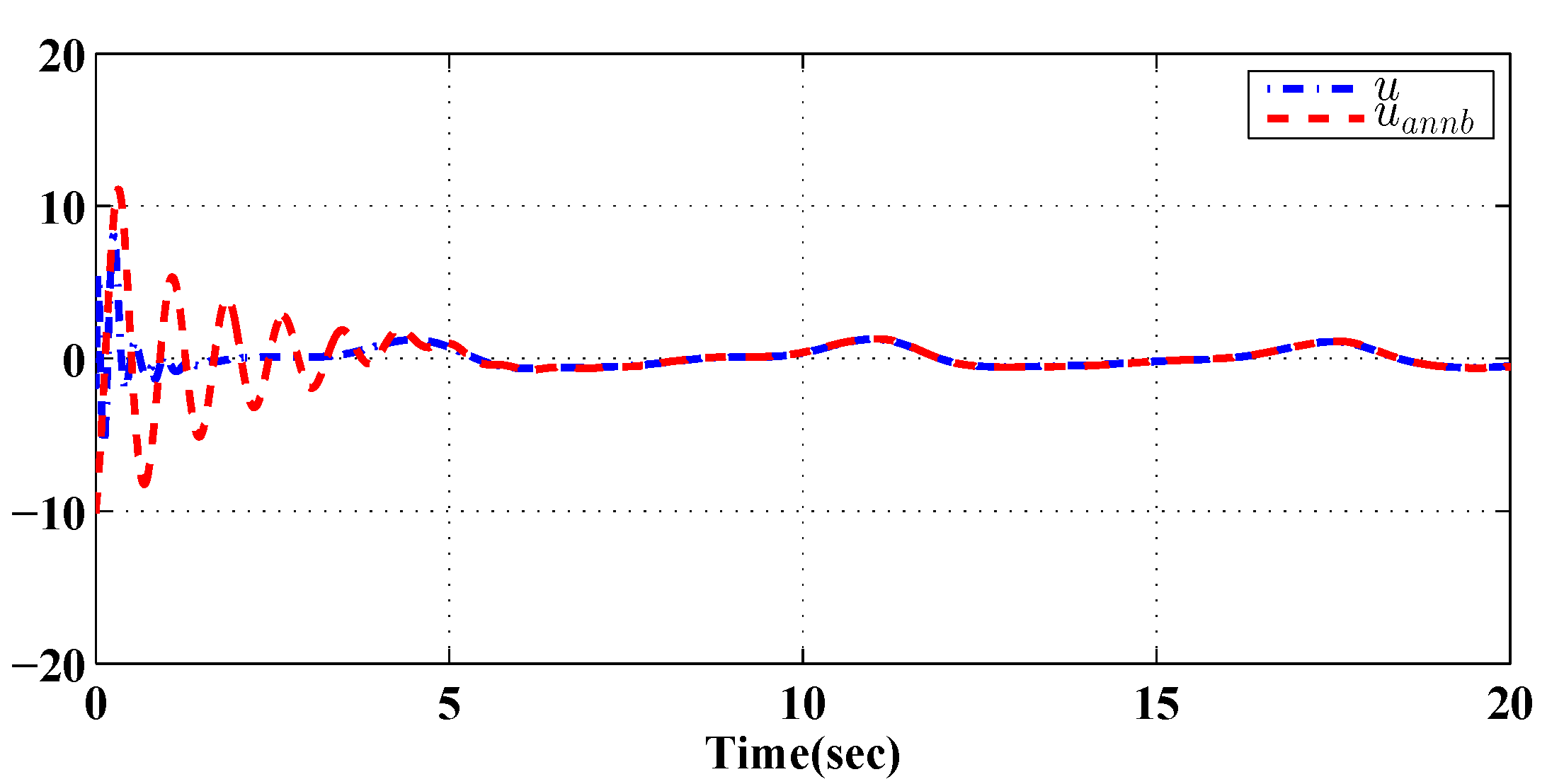
Figure 7.
Responses of control inputs. u represents our controller, while denotes the ANNB controller from [35].
The reconstruction of the system uncertainties and the NN approximations of the two methods are shown in Figure 3, Figure 4, Figure 5 and Figure 6, and the controller inputs of both methods are illustrated in Figure 7. In Figure 2, one can see that the tracking error with our controller is small. The reason is that NNs with -modification can only roughly approximate unknown functions, and thus, the function approximation errors are very large, which eventually renders bad tracking performance of the system. However, in our method, the unknown nonlinearities are reconstructed by using the estimation of , i.e., . Therefore, the function approximation error can be very small provided that the command filter can obtain with a small error. To this end, one can design large values of , and by using (47) and (52), it is not difficult to find that the function approximation error and the tracking error can both be reduced. On the other hand, from Figure 3, Figure 4, Figure 5 and Figure 6, it can be concluded that the unknown system nonlinearities, including the time-delay nonlinearities, are well reconstructed by using our command-filter-based backstepping control method.
6. Conclusions
An improved command-filter-based backstepping control strategy is proposed for a class of uncertain nonlinear systems in strict-feedback form with a time delay. Instead of adopting Lyapunov–Krasovskii functionals and universal approximators, the proposed approach only uses command filters and a backstepping technique, and the control problem of the studied system is, thus, solved. A new and simple control strategy for strict-feedback time-delayed nonlinear systems is presented based on ordinary Lyapunov functionals, a backstepping technique, and command filters. Command filters are used to estimate the time derivatives of some system signals; then, such estimations can be applied to reconstruct the approximations of such uncertainties, including unmodeled dynamics, external disturbances, and unknown time-delay nonlinearities. In the end, the negative feedback of such approximations can reduce the influence of uncertainties on the system. Compared with some results, such as those of adaptive neural network control, our designed controller has a simpler structure and fewer parameters. Next, we will improve this control method and apply it in more complex systems of environmental science and economic regulation and control.
Author Contributions
Conceptualization, D.Z. and X.Z.; methodology, D.Z.; validation, D.Z.; formal analysis, D.Z.; writing—original draft preparation, D.Z.; writing—review and editing, D.Z. and X.Z.; visualization, D.Z. and X.Z.; supervision, X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China under Grant 62203135.
Data Availability Statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhang, X.; Wang, R.; Fang, Y.; Li, B.; Ma, B. Acceleration-Level Pseudo-Dynamic Visual Servoing of Mobile Robots with Backstepping and Dynamic Surface Control. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 2071–2081. [Google Scholar] [CrossRef]
- Li, D.; Lu, S.; Liu, L. Adaptive NN Cross Backstepping Control for Nonlinear Systems with Partial Time-Varying State Constraints and Its Applications to Hyper-Chaotic Systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 2821–2832. [Google Scholar] [CrossRef]
- Shang, Y.; Chen, B.; Lin, C. Consensus Tracking Control for Distributed Nonlinear Multiagent Systems via Adaptive Neural Backstepping Approach. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 2436–2444. [Google Scholar] [CrossRef]
- Yin, S.; Gao, H.; Qiu, J.; Kaynak, O. Adaptive Fault-Tolerant Control for Nonlinear System with Unknown Control Directions Based on Fuzzy Approximation. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1909–1918. [Google Scholar] [CrossRef]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Dong, W. Command filtered backstepping. IEEE Trans. Autom. Control 2009, 54, 1391–1395. [Google Scholar] [CrossRef]
- Dong, W.; Farrell, J.A.; Polycarpou, M.M.; Djapic, V.; Sharma, M. Command filtered adaptive backstepping. IEEE Trans. Control. Syst. Technol. 2012, 20, 566–580. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H. Immersion and invariance based command-filtered adaptive backstepping control of VTOL vehicles. Automatica 2013, 49, 2160–2167. [Google Scholar] [CrossRef]
- Shen, Q.; Shi, P. Distributed command filtered backstepping consensus tracking control of nonlinear multiple-agent systems in strict-feedback form. Automatica 2015, 53, 120–124. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Ye, H.; Song, Y. Backstepping Design Embedded with Time-Varying Command Filters. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2832–2836. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, L. Error-Based Gain-Varying Finite-Time Command Filtered Backstepping Control for Nonlinear Systems with Disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2917–2921. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, J.; Yu, J.; Wang, Q.G. Adaptive Neural Networks Command Filtered Control for MIMO Nonlinear Discrete-Time Systems with Input Constraint. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 581–585. [Google Scholar] [CrossRef]
- Chen, M.; Li, Y.; Wang, H.; Peng, K.; Wu, L. Adaptive Fixed-Time Tracking Control for Nonlinear Systems Based on Finite-Time Command-Filtered Backstepping. IEEE Trans. Fuzzy Syst. 2023, 31, 1604–1613. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Q.G.; Yu, J. Convex Optimization-Based Adaptive Fuzzy Control for Uncertain Nonlinear Systems with Input Saturation Using Command Filtered Backstepping. IEEE Trans. Fuzzy Syst. 2023, 31, 2086–2091. [Google Scholar] [CrossRef]
- Zhao, X.; Chen, S.; Zhang, Z.; Zheng, Y. Observer-Based Adaptive Scaled Tracking Control for Nonlinear MASs via Command-Filtered Backstepping. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 425–437. [Google Scholar] [CrossRef]
- Xin, C.; Li, Y.X.; Ahn, C.K. Adaptive Neural Asymptotic Tracking of Uncertain Non-Strict Feedback Systems with Full-State Constraints via Command Filtered Technique. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 8102–8107. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Zhang, M.; Du, F. Robust Finite-Time Command-Filtered Backstepping Control for Flexible-Joint Robots with Only Position Measurements. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 1263–1275. [Google Scholar] [CrossRef]
- Zheng, X.; Yu, X.; Jiang, J.; Yang, X. Practical Finite-Time Command Filtered Backstepping with its Application to DC Motor Control Systems. IEEE Trans. Ind. Electron. 2024, 71, 2955–2964. [Google Scholar] [CrossRef]
- Mazenc, F.; Bliman, P.A. Backstepping design for time-delay nonlinear systems. IEEE Trans. Autom. Control 2006, 51, 149–154. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.; Liu, K.; Shi, P.; Lin, C. Direct adaptive fuzzy control for nonlinear systems with time-varying delays. Inf. Sci. 2010, 180, 776–792. [Google Scholar] [CrossRef]
- Yin, S.; Shi, P.; Yang, H. Adaptive Fuzzy Control of Strict-Feedback Nonlinear Time-Delay Systems with Unmodeled Dynamics. IEEE Trans. Cybern. 2016, 46, 1926–1938. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Lai, G.; Zhang, Y.; Chen, X.; Chen, C.L.P. Adaptive Neural Control for a Class of Nonlinear Time-Varying Delay Systems with Unknown Hysteresis. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 2129–2140. [Google Scholar]
- Li, T.; Li, Z.; Wang, D.; Chen, C.L.P. Output-Feedback Adaptive Neural Control for Stochastic Nonlinear Time-Varying Delay Systems with Unknown Control Directions. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1188–1201. [Google Scholar] [CrossRef]
- Liu, L.; Yin, S.; Zhang, L.; Yin, X.; Yan, H. Improved Results on Asymptotic Stabilization for Stochastic Nonlinear Time-Delay Systems with Application to a Chemical Reactor System. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 195–204. [Google Scholar] [CrossRef]
- Wei, Y.; Qiu, J.; Karimi, H.R.; Ji, W. A Novel Memory Filtering Design for Semi-Markovian Jump Time-Delay Systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 2229–2241. [Google Scholar] [CrossRef]
- Sun, W.; Wang, L.; Wu, Y. Adaptive Dynamic Surface Fuzzy Control for State Constrained Time-Delay Nonlinear Nonstrict Feedback Systems with Unknown Control Directions. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7423–7434. [Google Scholar] [CrossRef]
- Li, H.; Zhang, L.; Zhang, X.; Yu, J. A Switched Integral-Based Event-Triggered Control of Uncertain Nonlinear Time-Delay System with Actuator Saturation. IEEE Trans. Cybern. 2022, 52, 11335–11347. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Zhang, Z.; Ge, S.S. Stabilization Control for Strict-Feedback Nonlinear Systems with Time Delays. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7549–7560. [Google Scholar] [CrossRef]
- Liu, W.; Ma, Q.; Lu, Y.; Xu, S. Adaptive Fixed-Time Event-Triggered Fuzzy Control for Time-Delay Nonlinear Systems with Disturbances and Quantization. IEEE Trans. Fuzzy Syst. 2023, 31, 2848–2860. [Google Scholar] [CrossRef]
- Xu, K.; Wang, H.; Liu, P.X. Adaptive Fixed-Time Control for High-Order Stochastic Nonlinear Time-Delay Systems: An Improved Lyapunov–Krasovskii Function. IEEE Trans. Cybern. 2024, 54, 776–786. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C. Robust regulation of a chain of power integrators perturbed by a lower-triangular vector field. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2000, 10, 397–421. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. Practical output tracking of nonlinear systems with uncontrollable unstable linearization. IEEE Trans. Autom. Control 2002, 47, 21–36. [Google Scholar] [CrossRef]
- Chen, B.; Liu, X.; Liu, K.; Lin, C. Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 2009, 45, 1530–1535. [Google Scholar] [CrossRef]
- Ge, S.S.; Wang, C. Direct adaptive NN control of a class of nonlinear systems. IEEE Trans. Neural Netw. 2002, 13, 214–221. [Google Scholar] [CrossRef]
- Wang, M.; Chen, B.; Shi, P. Adaptive Neural Control for a Class of Perturbed Strict-Feedback Nonlinear Time-Delay Systems. IEEE Trans. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2008, 38, 721–730. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).