
Research on an Active Adjustment Mechanism Based on Non-Singular Terminal Sliding Mode and Finite-Time Disturbance Observer
Abstract
:1. Introduction
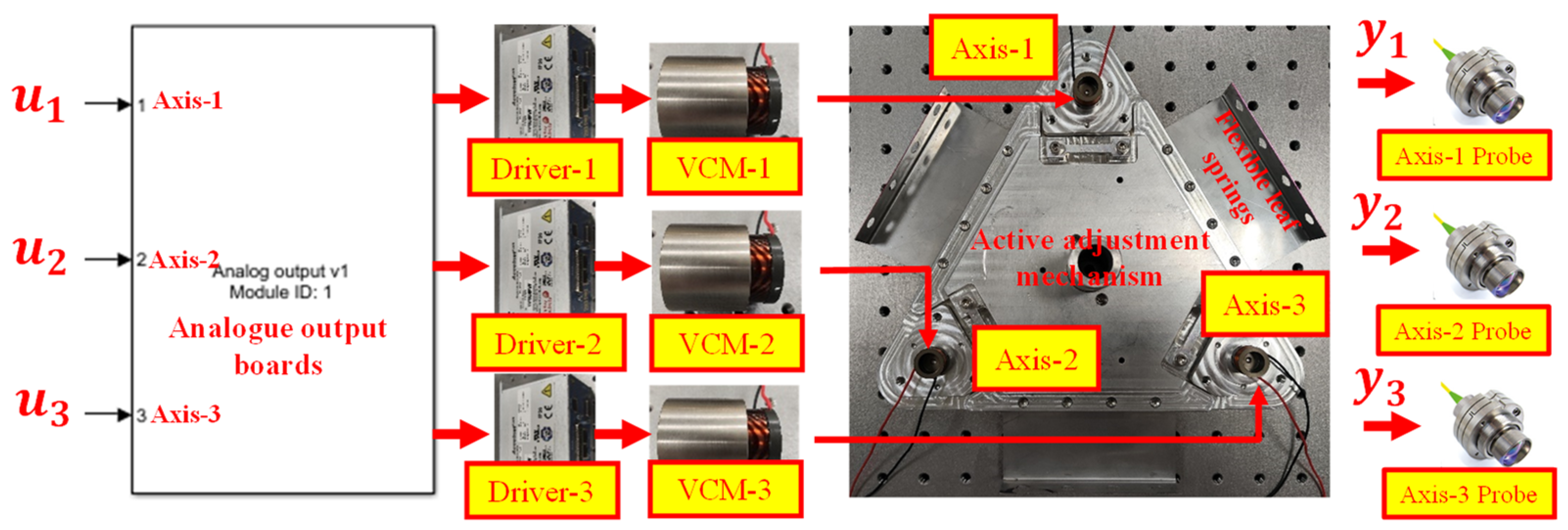
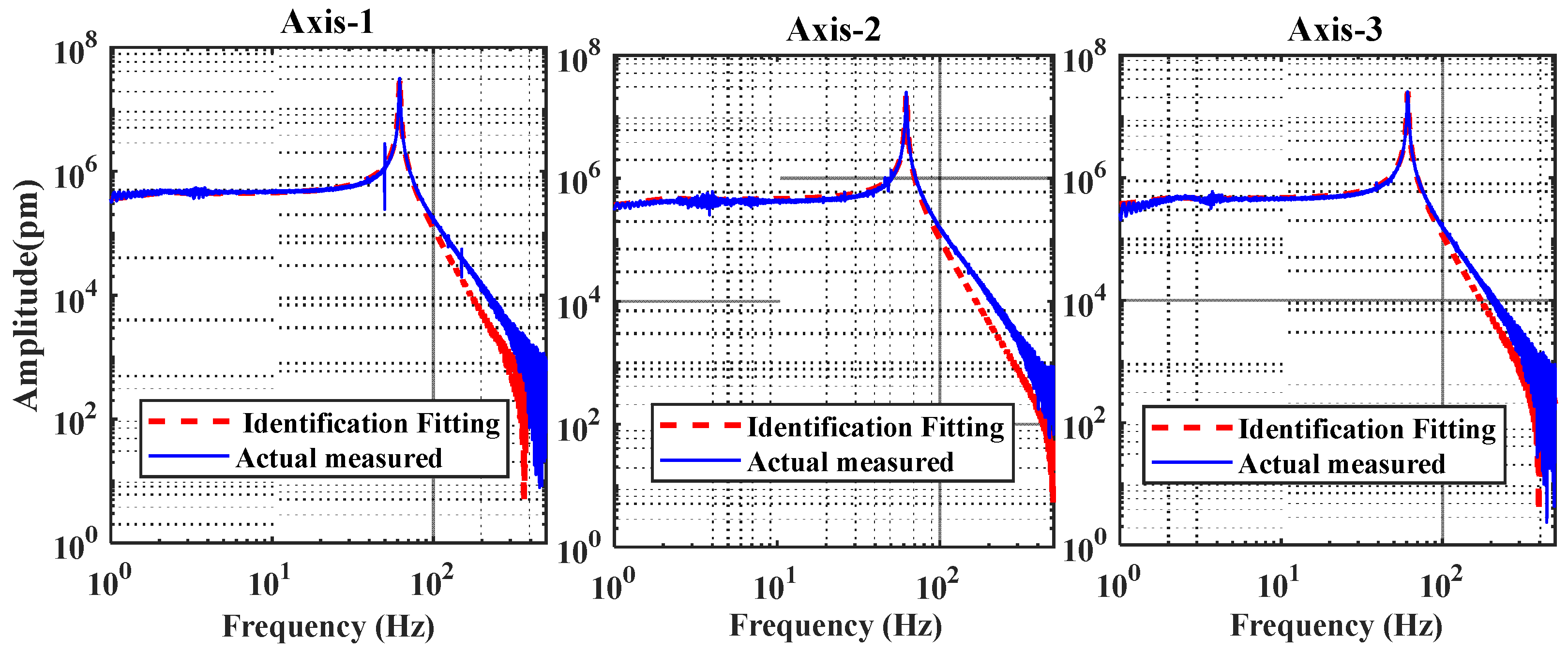
2. System Identification Experiment
3. Controller Design
3.1. System Resonance Suppression Methods
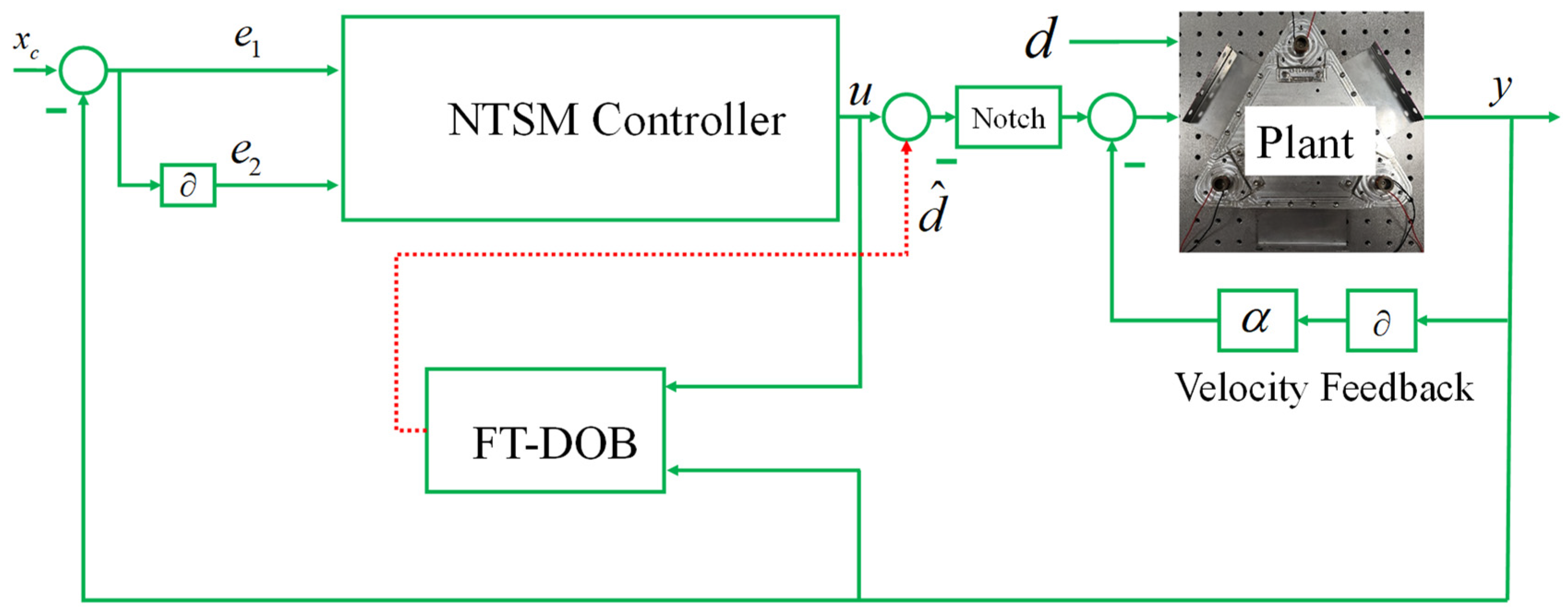
3.2. NTSM + FT-DOB Control Strategy
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Manzanillas, L.; Aplin, S.; Balerna, A.; Bell, P.; Casas, J.; Cascella, M.; Chatterji, S.; Cohen, C.; Dennis, G.; Welter, E.; et al. Development of multi-element monolithic germanium detectors for X-ray detection at synchrotron facilities. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2023, 1047, 167904. [Google Scholar] [CrossRef]
- Miki, H.; Hirano, K.; Ninomiya, T.; Arai, Y.; Honda, K. Visualization of temporomandibular joint articular cartilage using synchrotron-radiation X-ray phase-contrast imaging. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2023, 1049, 168005. [Google Scholar] [CrossRef]
- Kodama, M.; Takeuchi, A.; Uesugi, M.; Hirai, S. Machine learning super-resolution of laboratory CT images in all-solid-state batteries using synchrotron radiation CT as training data. Energy AI 2023, 14, 100305. [Google Scholar] [CrossRef]
- Okonda, J.J.; Angeyo, H.K.; Dehayem-Kamadjeu, A.; Rogena, A.E. Feasibility for early cancer diagnostics by machine learning enabled synchrotron radiation based micro X-ray fluorescence imaging of trace biometals as cancer biomarkers. Spectrochim. Acta Part B At. Spectrosc. 2023, 204, 106671. [Google Scholar] [CrossRef]
- Haas, S.; Sun, X.; Conceição AL, C.; Horbach, J.; Pfeffer, S. The new small-angle X-ray scattering beamline for materials research at PETRA III: SAXSMAT beamline P62. J. Synchrotron Radiat. 2023, 30, 1156–1167. [Google Scholar] [CrossRef] [PubMed]
- Mandolini, T.; Chantel, J.; Merkel, S.; Le Godec, Y.; Guignot, N.; King, A.; Hosdez, J.; Henry, L.; Hilairet, N. Deformation of two-phase aggregates with in situ X-ray tomography in rotating Paris–Edinburgh cell at GPa pressures and high temperature. J. Synchrotron Radiat. 2023, 30, 962–977. [Google Scholar] [CrossRef] [PubMed]
- Ji, T.; Zhu, H.C.; Peng, W.W.; Wang, J.; Zhao, H.W.; Li, A.G.; Chen, M. Infrared microspectroscopy beamline BL06B at SSRF. Nucl. Sci. Tech. 2024, 35, 2. [Google Scholar] [CrossRef]
- Fan, Y.; Qin, H.; Zhu, W.; Jia, W.; Liu, Y.; Wang, J.; Li, Z. Angular stability measurement of a cooled double-crystal monochromator at SSRF. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2020, 983, 164636. [Google Scholar] [CrossRef]
- Bai, Y.; Gong, X.; Lu, Q.; Song, Y.; Zhu, W.; Xue, S.; Wang, D.; Peng, Z.; Zhang, Z. Adaptive vibration control method for double-crystal monochromator based on VMD and FxNLMS. J. Synchrotron Radiat. 2023, 30, 308–318. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.; Gong, X.; Lu, Q.; Li, S.; Song, Y.; Peng, Z.; Zhang, Z. Research on an active control method of double crystal monochromator with disturbance observer. Nucl. Instrum. Methods Phys. Res. Sect. A 2023, 1057, 168729. [Google Scholar] [CrossRef]
- Yamazaki, H.; Matsuzaki, Y.; Shimizu, Y.; Tsuboki, I.; Ikeya, Y.; Takeuchi, T.; Tanaka, M.; Miura, T.; Kishimoto, H.; Ohashi, H.; et al. Challenges toward 50 nrad-stability of X-rays for a next generation light source by refinements of SPring-8 standard monochromator with cryo-cooled Si crystals. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2019; Volume 2054, p. 060018. [Google Scholar]
- Wu, J.; Gong, X.; Song, Y.; Chen, J.; Zhu, W.; Liu, Y.; Fan, Y.; Jin, L. Improvement of the performance of a cryo-cooled monochromator at SSRF. Part II: Angular stability of the exit beam. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2021, 988, 164872. [Google Scholar] [CrossRef]
- Qin, H.; Fan, Y.; Zhang, L.; Jin, L.; He, Y.; Zhu, W. Design and stability performance of a cradle type cryo-cooled monochromator at Shanghai Synchrotron Radiation Facility. Nucl. Instrum. Methods Phys.Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2022, 1027, 166350. [Google Scholar] [CrossRef]
- Jiang, B.; Zhang, Z.; Zhou, S.; Chu, Y.; Guo, Y. Stability analysis of an angle trimmer mechanism applied to a double crystal monochromator. J. Phys. Conf. Ser. 2023, 2450, 012051. [Google Scholar] [CrossRef]
- Igarashi, N.; Ikuta, K.; Miyoshi, T.; Matsugaki, N.; Yamada, Y.; Yousef, M.S.; Wakatsuki, S. X-ray beam stabilization at BL-17A, the protein microcrystallography beamline of the Photon Factor. J. Synchrotron Radiat. 2008, 15, 292–296. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Yu, X.H.; Man, Z.H. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Zhai, J.; Xu, G. A novel non-singular terminal sliding mode trajectory tracking control for robotic manipulators. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 391–395. [Google Scholar] [CrossRef]
- Yu, S.; Wu, H.; Xie, M.; Lin, H.; Ma, J. Precise, robust motion control of cell puncture mechanism driven by piezoelectric actuators with fractional-order nonsingular terminal sliding mode control. Bio-Des. Manuf. 2020, 3, 410–426. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, B.; Yang, H.; Wang, Y. Finite-time tracking control for pneumatic servo system via extended state observer. IET Control. Theory Appl. 2017, 11, 2808–2816. [Google Scholar] [CrossRef]
- Dong, W. Finite Time Extended State Observer and Its Application. Master’s Thesis, Tianjin University, Tianjin, China, 2017. (In Chinese). [Google Scholar]
- Liu, J. Sliding Mode Control Design and Matlab Simulation; Tsinghua University Press: Beijing, China, 2019. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Control Strategy | Max (nm) | Min (nm) | RMS (nm) |
|---|---|---|---|---|
| Axis-1 | Uncontrolled | 80.81 | −82.32 | 20.70 |
| C-SMC | 26.92 (↓66.69%) | −27.18 (↓66.98%) | 6.59 (↓68.16%) | |
| C-SMC + FT-DOB | 16.04 (↓79.70%) | −18.00 (↓78.13%) | 4.33 (↓79.08%) | |
| NTSM | 18.16 (↓77.52%) | −19.92 (↓75.80%) | 4.69 (↓77.34%) | |
| NTSM + FT-DOB | 16.02 (↓80.17%) | −17.44 (↓78.81%) | 3.88 (↓81.25%) | |
| Axis-2 | Uncontrolled | 139.45 | −141.02 | 32.04 |
| C-SMC | 43.67 (↓68.68%) | −45.02 (↓68.08%) | 10.84 (↓66.17%) | |
| C-SMC + FT-DOB | 30.46 (↓78.16%) | −32.19 (↓77.17%) | 7.55 (↓76.44%) | |
| NTSM | 36.60 (↓73.75%) | −36.92 (↓73.82%) | 9.45 (↓70.51%) | |
| NTSM + FT-DOB | 29.05 (↓79.17%) | −28.03 (↓80.12%) | 6.88 (↓78.53%) | |
| Axis-3 | Uncontrolled | 50.02 | −49.42 | 14.30 |
| C-SMC | 36.77 (↓26.49%) | −36.46 (↓26.22%) | 9.18 (↓35.80%) | |
| C-SMC + FT-DOB | 19.22 (↓61.58%) | −21.66 (↓56.17%) | 4.90 (↓65.73%) | |
| NTSM | 22.39 (↓55.14%) | −22.21 (↓55.06%) | 5.41 (↓62.17%) | |
| NTSM + FT-DOB | 16.44 (↓67.13%) | −18.34 (↓62.89%) | 4.03 (↓71.82%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Y.; Gong, X.; Li, S.; Lu, Q.; Song, Y. Research on an Active Adjustment Mechanism Based on Non-Singular Terminal Sliding Mode and Finite-Time Disturbance Observer. Electronics 2024, 13, 2794. https://doi.org/10.3390/electronics13142794
Bai Y, Gong X, Li S, Lu Q, Song Y. Research on an Active Adjustment Mechanism Based on Non-Singular Terminal Sliding Mode and Finite-Time Disturbance Observer. Electronics. 2024; 13(14):2794. https://doi.org/10.3390/electronics13142794
Chicago/Turabian StyleBai, Yang, Xuepeng Gong, Shengchi Li, Qipeng Lu, and Yuan Song. 2024. "Research on an Active Adjustment Mechanism Based on Non-Singular Terminal Sliding Mode and Finite-Time Disturbance Observer" Electronics 13, no. 14: 2794. https://doi.org/10.3390/electronics13142794