Abstract
In the realm of Intelligent Transportation Systems (ITS), vehicular communication technologies such as Dedicated Short-Range Communications (DSRC), Cellular Vehicle-to-Everything (C-V2X), and LoRa 2.4 GHz play crucial roles in enhancing road safety, reducing traffic congestion, and improving transport efficiency. This article explores the integration of these communication protocols within smart intersections, emphasizing their capabilities and synergies. DSRC, based on IEEE 802.11p, provides reliable short-range communication with data rates up to 27 Mbps and latencies below 50 ms, ideal for real-time safety applications. C-V2X leverages LTE and 5G networks, offering broader coverage up to 10 km and supporting data rates up to 100 Mbps, with latencies as low as 20 ms in direct communication mode (PC5). LoRa 2.4 GHz, known for its long-range (up to 15 km in rural areas, 1–2 km in urban settings) and low-power characteristics, offers data rates between 0.3 and 37.5 kbps, suitable for non-critical data exchange and infrastructure monitoring. The study evaluates the performance and interoperability of these technologies in urban environments, focusing on data latency, transmission reliability, and scalability. Experimental results from simulated and real-world scenarios show that DSRC maintains reliable communication within 1 km with minimal interference. C-V2X demonstrates superior scalability and coverage, maintaining robust communication over several kilometers in high-density urban settings. LoRa 2.4 GHz exhibits excellent penetration through urban obstacles, maintaining connectivity and efficient data transmission with packet error rates below 10%.
1. Introduction
According to global reports, but also according to many other organizations, including the World Health Organization, it is estimated that more than 50 million people are injured every year as a result of road crashes, and more than 1 million lose their lives as a result of human error or poor road infrastructure without management systems [1]. These reports also show that many more people lose their lives as a result of road accidents, especially in the 15 to 35 age group, which is a matter of great concern to both the academic and administrative worlds. In addition to the loss of human lives, these reports also highlight the financial effort to which the gross domestic products of the affected countries are subjected, and the percentage is around 3%.
Several congresses and assemblies have even discussed resolutions on improving global road safety, which aims to reduce the loss of human life by as much as 50% by 2030, including the reduction of carbon emissions by the same percentage by the end of 2050 [2]. A series of measures implemented by the International Transport Forum has begun to show through in the form of a reduction of around 10% in the number of fatalities, reinforcing and highlighting just how important these issues are. According to a report issued by the U.S. Department of Transportation’s Innovative Technology and Research Administration, the deployment of road safety applications that use inter-vehicle communications and co-communications between vehicles and infrastructure could reduce road crashes by up to 81% [3]. This reduction is distributed as follows: 83% for crashes involving light vehicles and 72% for those involving heavy vehicles. Publications supporting the major transformations in transport, part of the Europe on the Move initiative and the EU Road Safety Policy Framework 2021–2030, focus on mobility [4].
It can be said that from all the current stages analyzed, globally, several directions and developments can be identified, including implementations of cooperative intelligent transportation systems and also dedicated systems (C-ITS). Therefore, vehicular communications are an essential part of these solutions, aiming to include traffic participants, but also pedestrians, in a single network. These communications are found in several forms: communications between one or more vehicles, vehicle-to-vehicle (V2V), between vehicles and road infrastructure (V2I), between pedestrians and infrastructure (I2P), or between vehicles and pedestrians (V2P).
Cellular Vehicle-to-Everything (C-V2X) and dedicated short range communications (DSRC) are two key technologies for vehicle communications. C-V2X, based on 4th Generation (4G) and 5th Generation (5G) cellular technologies, enables vehicles to communicate directly with each other, as well as road infrastructure and pedestrians, offering low latency and high bandwidth capacity. C-V2X operates in direct mode (PC5 models) and network mode (Uu models), providing flexibility and reliability in communications.
DSRC, on the other hand, utilizes dedicated frequencies in the 5.9 GHz band for vehicular communications, with very low latency and high reliability, and is deployed in various road safety and traffic management systems. Although DSRC was initially the predominant standard for vehicle-to-everything V2X, C-V2X is gaining ground due to its integration with existing cellular networks and support for advanced 5G-based applications. LoRa (Long Range) technology at 2.4 GHz is another emerging solution for vehicular communications, in particular for applications requiring long-distance data transfers but at lower data rates. The 2.4 GHz LoRa offers significant advantages in terms of low power consumption and the ability to cover long distances, making it ideal for vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2P) communications in urban and rural environments. This technology is particularly useful for infrastructure condition monitoring and real-time data collection applications.
The initial development of these communications aimed to facilitate the transmission of information in traffic control systems, increase road safety, and prevent accidents. Subsequently, with technological advances and the development of new communication infrastructures and new types of cars, they have also been deployed in the field of autonomous vehicles to facilitate the transfer of data in larger quantities [5]. These developments are also accompanied by significant challenges, in particular those related to high costs, the need to develop new large-scale infrastructures, the harmonization of technologies developed by vehicle manufacturers, and the different standards existing worldwide. On the other hand, the development of technologies that may prove disruptive to existing vehicular communication technologies, such as new 5th generation (5G) cellular communication technologies and 6th generation prototypes, bring a number of new challenges to vehicular communication researchers while also offering potential solutions to various open problems.
By analyzing the challenges of the field, I have tried to develop, both simululatively and practically, a modular, scalable, and adaptive solution that can perform communications and computational analysis useful in road safety applications as well as in driver assistance. The solutions are based both on existing hardware components and on modules designed and implemented to streamline certain operations within the applications. The research has led to the development of a modular hardware-software architecture and a hybrid communications and vehicular computing applications platform.
In the domain of Intelligent Transportation Systems (ITS), vehicular communication technologies like dedicated short-range communications (DSRC), cellular vehicle-to-everything (C-V2X), and LoRa 2.4 GHz are crucial for enhancing road safety, reducing traffic congestion, and improving transport efficiency. This study examines the integration of these communication protocols within smart intersections, highlighting their capabilities and synergies. This study evaluates the performance and interoperability of these technologies in urban environments, focusing on data latency, transmission reliability, and scalability. Experimental results from both simulated and real-world scenarios show that DSRC maintains reliable communication within 1 km, with minimal interference in less congested bands. C-V2X demonstrates superior scalability and coverage, maintaining robust communication over several kilometers even in high-density urban settings, with data rates that support high-throughput applications. LoRa 2.4 GHz exhibits excellent penetration through urban obstacles, maintaining connectivity and efficient data transmission with packet error rates below 10% under typical urban interference conditions. The findings highlight the complementary nature of these technologies: DSRC excels in latency-sensitive safety applications, C-V2X provides extensive coverage and high data rates suitable for real-time traffic management and autonomous vehicle coordination, while LoRa 2.4 GHz offers a reliable backbone for low-power, long-range communication in smart infrastructure monitoring. Furthermore, this research underscores the potential of these technologies to support the transition towards fully autonomous vehicles and smart mobility infrastructure. A hybrid communication approach, integrating DSRC, C-V2X, and LoRa 2.4 GHz, is essential for creating resilient and adaptive ITS solutions. This approach ensures robust and efficient data transmission across different urban scenarios, significantly contributing to the development of future smart cities [6].
The article begins with a brief introduction to the field and the importance of the communications presented and studied, and in Section 2, information is presented to conclude and discuss what has been obtained in the article and ideas for the development of V2X, DSRC, and LoRa 2.4 GHz communications, as well as the current state of the art in traffic safety and road safety systems. Section 3 exposes elements and aspects that summarize the actual progress of these communication protocols, as well as simulating the impact that a mixed architecture including LoRa technology will have in order to have a much better scalability and extended communication areas. In Section 4, information is presented to conclude and discuss what has been obtained in the article and how this direction will be approached in the future.
2. State of Developments of Vehicular Communications Based on C-V2X, DSRC and LoRa
We can say that the interconnection of vehicles can be realized by the automotive industry, but when the ideal protocol for such communications will be chosen and how it will be perfectly scalable regardless of the way information is transmitted depends on the density of vehicles or the degree of urban congestion.
For these connections, wireless protocols are required, with 802.11 [7] and cellular being the main options for these systems. There is still debate within the industry as to which protocol will prevail or whether all will migrate to cellular with the advent of 5G. If 802.11p is chosen, then a Dedicated Short-range Communication (DSRC) transceiver is required for wireless communication. There are strong arguments to favor DSRC in this debate, and some components are already available and compatible with this protocol. According to the analysis, it can be stated that in October 1999, the United States Federal Communications Commission (FCC) succeeded in allocating 75 Mhy within the 5.9 GHY band for use in intelligent transportation systems (ITS) operating on the DSRC protocol. However, the objective was to be able to provide a dedicated channel to realize vehicle-to-vehicle communications. Then the European Union realized and adopted a similar measure by 2008, and they succeeded in allocating 30 MHz in the same band for ITS systems. This was conducted for countries such as Japan, Singapore, and European countries that use DSRC to collect tolls on certain road sectors. DSRC is a wireless protocol, derived from WiFi technology, operating at the upper limit of the WiFi 5 band. Specifically, this protocol operates in the frequency range 5.850–5.925 GHz, using modulations such as binary phase-shift keying (BPSK), quadrature phase shift keying (QPSK), and quadrature modulation (16QAM) and 64QAM, in combination with orthogonal frequency-division multiplexing (OFDM) and CSMA.
The protocol complies with the specifications defined in the IEEE 802.11p standard [8]. Compared to DSRC, C-V2X (Cellular Vehicle-to-Everything) vehicular communication technology offers additional functionalities such as direct communication with pedestrians (called V2P), thus marking a considerable step forward. Both protocols have the ability to connect to cellular networks for non-safety applications, making DSRC a hybrid system for V2X communications. On a printed circuit board (PCB), the layout methods used for WiFi can also be applied to DSRC, facilitating rapid integration of these systems for many designers, see Table 1 in in which the characteristics and particularities of DSRC and C-V2X are presented.

Table 1.
Characteristics, features, and parameters of DSRC and C-V2X communication protocols.
2.1. Current Status of C-V2X Developments
Cellular vehicle-to-everything (C-V2X) is a type of technology that enables wireless communications, allowing vehicles to communicate with each other, pedestrians, and the surrounding infrastructure, all over a cellular network. Therefore, C-V2X is being developed to improve road safety, reduce traffic congestion, and significantly increase the efficiency of intelligent transportation systems. However, the basis of this C-V2X technology is founded on heterogeneous network environment; it utilizes (LTE) and 5G cellular communication technologies [9], which are extremely popular and highly praised for realizing high-speed data transfer [10,11].
Considering this direction to be extremely important, the development and standardization of this C-V2X technology has been achieved by several organizations and in direct partnership with 3GPP—3rd Generation Partnership Project, the European Telecommunications Standards Institute (ETSI), but also with the help of the Institute of Electrical and Electronics Engineers (IEEE), as well as the 5G Automotive Associations (5GAA).
According to all speculations, it is expected that C-V2X will play an essential role in the development of intelligent transportation systems (ITS) [12] and in vehicle networks, which are interconnected to the infrastructure and to each other. Urban areas, including roads, are an extremely important element of road infrastructures and an important factor that supports the mobility or logistics of vehicles. We can say that it is at the basis of social and economic growth, but also at the interconnection of various routes, such as direct links between cities, ports, airports, or even links between neighboring countries. With the growth of the last decade, the migration of populations, urban progress, industrialization, and also the large number of vehicles in active use, we are realizing the negative side of these developments [13].
According to the United Nations, in 1950, 30% of the world’s population lived in cities; today, this percentage has risen to 54%. The United Nations estimates suggest that by 2050, 66% of the global population will live in urban areas [6,14,15]. Specific societal trends that will influence the future of transportation include:
- ✓
- A new wave of urbanization will put pressure on existing transport infrastructure.
- ✓
- Increasingly stringent emission policies and regulations imposed by governments.
- ✓
- Increased pressure on public transport and logistics/delivery services due to the emergence of different business prospects.
- ✓
- Effective use of real-time traffic data and open data for traffic management.
In order to manage in time all these problems, a first and main solution, which can be addressed in the directions presented and in order to reduce all this vicious circle, is the improvement of road infrastructures and highlighting the various methods to achieve an intelligent transport able to manage in real time every negative event, and this approach to be sustainable from all points of view, especially the economic and environmental for a sustained sustainability. Looking ahead over the next 2 to 5 years, various key transformations in the transportation environment are anticipated, including:
- ✓
- Elimination of road accidents,
- ✓
- Implementation of an adaptive support system to manage high traffic flows,
- ✓
- Increasing vehicle utilization, and
- ✓
- Promoting more efficient and greener transportation, including zero emission vehicles [16,17].
The rapid evolution of information technology (IT), sensors, geolocation, and communication technologies has facilitated the development of remarkable applications that enable the implementation of strategies in an intelligent way, through a better understanding of the environment. This advancement led to the development of intelligent vehicle-highway systems (IVHS), which were later officially renamed to intelligent transportation systems (ITS) in 1994 by the United States Department of Transportation (USDOT) to reflect a broadened mission that includes all aspects of public transportation and intermodal connections [18].
Intelligent Transportation Systems (ITS) are defined as “a system designed to solve the various problems facing road traffic by exchanging information between roads, people, vehicles, and cities” [4]. The main objectives of ITS include the evaluation, development, analysis, and integration of advanced technologies to achieve efficiency, energy conservation, time savings, improved safety measures, enhanced sustainability, and the satisfaction of drivers, pedestrians, and other traffic participants [19,20,21]. By implementing ITS, it can transform an unorganized transport environment into an intelligent and connected system, thus addressing current road traffic challenges and promoting safer, more efficient, and more sustainable transport.
To achieve intelligent and adaptive management of transportation systems, the International Society of Automotive Engineers (SAE) [22] has developed a detailed roadmap with six levels of evolution, shown in Table 2. We are currently witnessing significant developments in autonomous vehicles. For example, various commercial companies such as Volvo, MG, Tesla, and other car manufacturers are developing and launching autonomous vehicles. However, reaching level 4 and 5 vehicle automation remains an ambitious goal for many automotive organizations and researchers.
Table 2.
LoRa features and characteristics. Experimental standard configurations used.
An essential aspect for achieving full automation in transportation is the efficient exchange of information between all entities involved in traffic. In this context, cooperative—vehicle to everything (C-V2X) communication adds a vital dimension to the mission of intelligent transportation systems (ITS). It enables vehicle-to-vehicle (V2V), vehicle-to-vehicle (V2P), vehicle-to-infrastructure (V2I), and vehicle-to-network (V2N) communications, thus contributing to safer and more connected mobility in both line-of-sight (LOS) and line-of-sight overlay (NLOS) situations [23].
2.2. Current Status of DSRC Developments
When we discuss dedicated short-range communications (DSRC), we can say that it is a wireless communications protocol designed for the purpose of connecting vehicles (CV) within multiple applications or systems of type (ITS). This protocol is based on the IEEE 802.11p standard as part of the Wireless Access within Vehicular Environments (WAVE) system in the United States, using a 75 MHz spectrum with a frequency range between 5.850 and 5.925 GHz [24,25]. However, unlike the IEEE 802.11a standard [26], IEE 802.11p can optimize the mobility of connected vehicles by reducing the bandwidth by about 10 MHz, thus realizing a doubling of temporal resolution [27,28]. Knowing that it has a different broadcast nature, DSRC, which is based on IEEE 802.11p, does not require an acknowledgment of the frames being transmitted. Thus, to avoid the uncontrolled extension of contention frames and to increase latency, the MAC protocol that IEEE 802.11p uses strictly for contention adopts a fixed contention frame, replacing an exponential retreat [24,29].
The proven effectiveness of the DSRC protocol in safety applications and the widespread availability of DSRC devices have led major automobile manufacturers to adopt this technology in their fleets [30,31]. To address new technological requirements and challenges, a study group was formed in 2018 to develop next-generation standards such as IEEE 802.11bd [32]. These standards aim to optimize and improve the processes and operational modes of DSRC technology. According to the IEEE 802.11bd Working Group (TGbd), backward compatibility will enable 802.11p and 802.11bd compliant devices to communicate efficiently over the same operational channel, ensuring interoperability and continuity of functionality [33,34]. In direct accordance with the architecture of the implemented physical layer, also referred to as (PHY), the IEEE 802.11p standard is derived from IEEE 802.11a more precisely by reducing the sub-carrier spacing by a factor of two [33,34]. In view of the fast mobility characteristics of vehicular network, the reduced IEEE 802.11p sub-carrier spacing makes the DSRC communication link vulnerable to errors caused by Doppler effect, while the double symbol duration improves the performance in the presence of channel multipath effects.
Therefore, everything becomes paradoxical and we have a trade-off that we identify between the robustness of the link between the interference between symbols and the way the multipath spreading is relayerized, and the error is relative in the case of Doppler spreading [35]. There is also an architecture of the medium access control (MAC) layer of the 802.11p standard, which is based on the out-of-context mode of operation given by an underlying service set (OCB), where nodes can transmit and receive data as well as control frames without the need to form or identify a service set (SS) [36,37]. Another extremely notable aspect is that IEEE 802.11p incorporates the distributed coordination function (DCF) into the radio resource allocation procedure. DCF, we can say, is a MAC technique, which utilizes the Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) protocol, which, at its core, has an advanced binary fallback algorithm.
It can be said that IEEE 802.11p incorporates the Distributed Coordination Function (DCF) in the radio resource allocation process. DCF is a MAC strategy, which utilizes the Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA) protocol together with a binary backoff algorithm. In a direct comparison with IEEE 802.11a, in an IEEE 802.11p based network, radio units compete for channel access using the CSMA/CA protocol with a fixed backoff time and contention window parameters [38]. According to previous expositions, exponential backoff time in IEEE 802.11a can lead to high message transmission latency, which is not suitable for a vehicular network; thus, a fixed backoff time in CSMA/CA of DSRC allows control of data transmission latency at the cost of reduced network scalability. Enhanced Distribution Channel Access (EDCA) is a DCF-based MAC technique that aims to solve the scalability problem in DSRC. In the EDCA approach, high priority messages are more likely to be transmitted than low priority messages [39,40].
2.3. Current State of LoRa 2.4 GHz Developments
We now turn our attention to the chapter focusing on emerging technologies like the Internet of Things (IoT), which have become integral to our daily lives. Despite their limited application in the automotive industry, these technologies are gaining traction in road safety and Intelligent Transportation Systems (ITS). Notably, LoRa is proving to be a highly scalable solution for IoT data collection, offering low power consumption and extensive coverage, making it particularly effective for wide-area monitoring and communication in ITS applications. We can say that LoRa usually operates on the sub-GHz in-band principle; this characteristic is specific to certain regions, and therefore applications are limited worldwide. However, the improved version of LoRa for the 2.4 GHz ISM band has realized a turning point and has stimulated the research community, as it allows the use of frequency channels used globally.
Therefore, LoRa is required to coexist with many other competing standards and systems in the 2.4 GHz bandwidth category, especially through the evolution of MAC and network protocols dedicated to Lo-RAWAN connectivity. Low Power Wide Area Networking (LPWAN) or LoRa, NB-IoT, has received a global impetus from the telecommunication industry and operators worldwide, who are deploying different systems based on these protocols [41].
Thus, LoRa [42] can be considered as one of the most representative LPWANs, especially because it uses spread-spectrum technologies in sub-GHz bands, which are unlicensed (e.g., 868 MHz for Europe, 915 MHz in North America). However, the parameters of the frequency channel or maximum duty cycle, the maximum transmission power, or the dedicated medium access mechanism may differ from one geographical area to another, and the design or hardware components have to be taken into account in the realization of new communication systems or protocols. Alternatively, in order to achieve substantial progress and to avoid such problems, a new LoRa version in ISM on 2.4 GHz frequency has been proposed, this band having similar technical specifications, only that they allow a worldwide coverage. In addition to these aspects, the advantages it offers must be highlighted, namely the robustness due to the use of its own LoRa modulation, the use of common frequency bands, and the lack of duty cycle limitations [43].
Knowing all the aspects presented above about the standards involved in the discussion and having the experience of previous implementations, we now focus on LoRa 2.4 GHz, considering that a significant contribution can be made to automotive, road safety, and intelligent road transportation systems by using such an approach. Even if the impact of a change in frequency has been studied for other modulations, the LoRa behaviors are not 100% known, especially in highly agglomerated areas for 2.4 GHz, as it is also used in protocols such as Wi-Fi, Bluetooth, ZigBee, in home appliances, or mobile telephony for children. Perhaps the biggest challenge in the current case is still, for the LoRa 2.4 GHz protocol, the mitigation of interference from a large number of devices; here we are talking about developed and intensely industrialized countries, but also the existence of other devices using equivalent technologies. The study focuses very much on the introduction of LoRa 2.4 GHz for outdoor testing to cover heavily trafficked and congested areas, which are already tested and analyzed by DSRC—C-V2X based systems. In the case of LoRa 2.4 GHz, it can be said that it could have a coverage range of more than 2 km outdoors, with a packet delivery rate of at least 1 packet per 40–50 m indoors with the presence of obstacles [44].
Here we introduce the features that 2.4 GHz LoRa has, but also what sub-GHz LoRa offers. If we are to discuss the physical layer, both technologies seem to use the same type of chirp spread spectrum modulation, where the signal is encoded using a chirp sequence. The chirp can be said to be a linear frequency over a given bandwidth and time interval. Each chirp can be positive up if the frequency parsing increases or positive down if it decreases. If an encoding procedure is performed for this instant then there are some fluctuations [45].
When the chirp start frequency is encoded, its value is also encoded. In the case of LoRa 2.4 GHz standard parameter values are used as in the case of sub-GHz LoRa in the idea that there is a trade-off between reliability and how to optimize the power consumption and hence the transfer rates; these are also a spreading factor (SF) bandwidth, which we denote by (BW) or coding rate (CR). When increasing the SF value, the duration for each chirp may increase, but also the energy consumption, in this case being necessary to transmit the same message in the loop. We can say that by increasing the SF, it automatically scales the receiver sensitivity, which in turn increases the communication range. When the bandwidth (BW) decreases with it, the chirp duration is also more energy efficient, but the disadvantage is that it can reduce reliability. In all these cases, the coding rate (CR) can control how many redundancy bits can be added to the data in the total payloads. For this purpose, Table 2 has been created, summarizing the values for each protocol and the parameters for sub-GHz LoRa and 2.4 GHz LoRa. It can be said that LoRa 2.5 GHz can also realize the introduction of SF 5 for much larger bandwidths; these facilitate an exponential increase in the transfer rate [46,47].
Thus, the LoRa modulation offers several advantages, regardless of the frequency bands for a good operation, and here it must be emphasized that it offers an extremely robust oriented design and can allow extremely good and oriented links even around 168 dB or 145 dB with different adjustments, even using the Semtech SX1276 or 1280 chip (Semtech, Camarillo, CA, USA). In addition to these aspects, we also have in discussion the change of the communication intervals with the corresponding transfer rates and low power consumption, the presence of quasi-orthogonality of the spreading factor, which allows simultaneous communications on different SFs, and all this in conjunction with low power consumption, more precisely 11.5 mA for transmit and approximately 7 mA for receive [48,49].
3. Previous Results C-V2X and DSRC vs. LoRa 2.4 GHz Approach
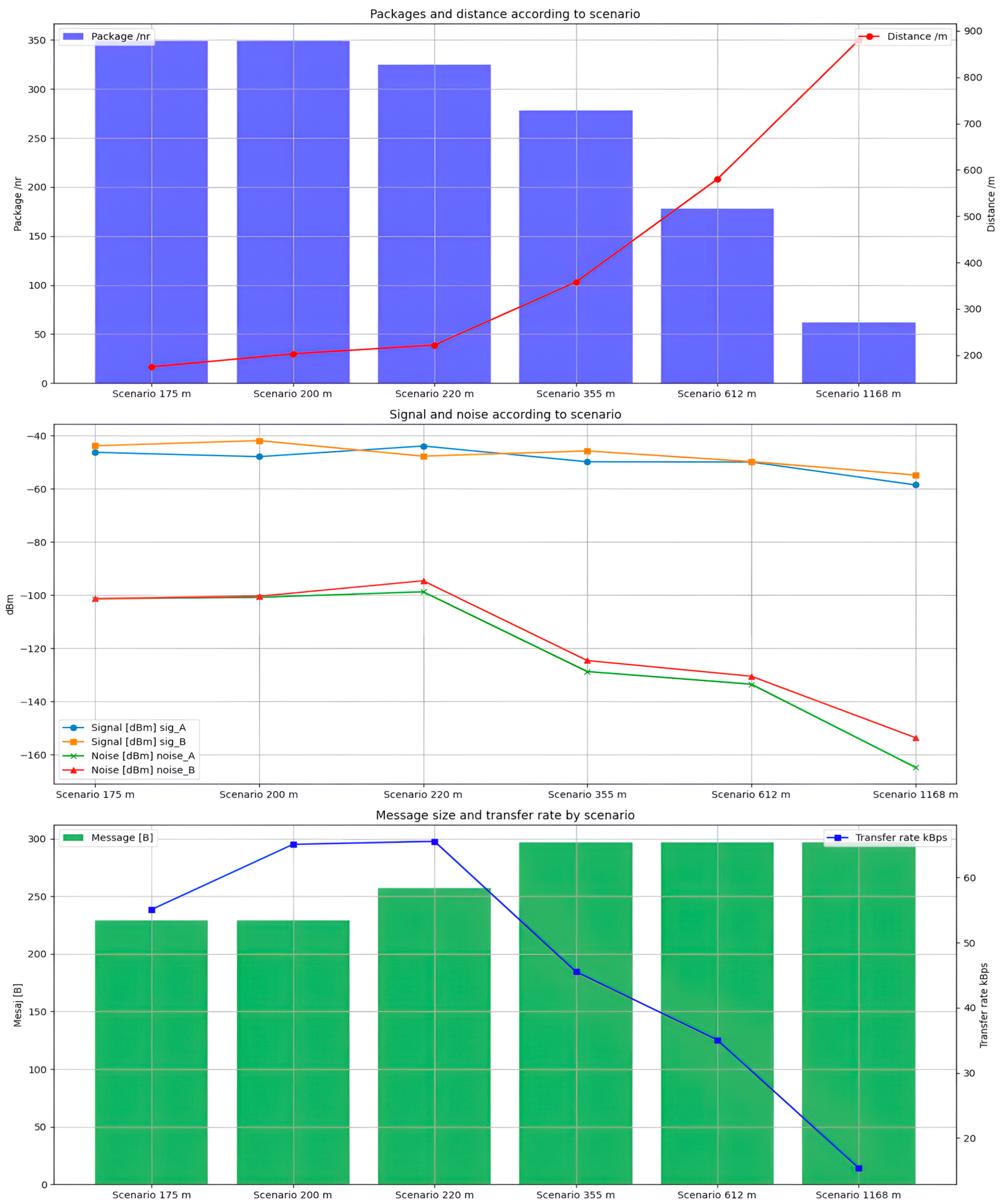
We know from previous studies that when the experimental testing was carried out to achieve communication modalities via DSRC and a hybrid C-V2X architecture, direct communication distances with signal loss were achieved over a distance of more than 300 m under ideal conditions, and subsequently that the degree of complexity increased, reaching more than 800 m in a straight line and 1200 m on the taxiway. At that time, it was observed that if the measurements reach the performance limit for the mixed DSRC system, adaptive behavior under high mobility, or intense flow dynamics, problems with network scalability start to appear. Therefore, as the signal quality starts to decrease, channel coding can be compensated by multipath fading procedures, and in the respective cases the signal to noise ratio can be influenced by any other source identified in the area, even by the thermal factor. Measurements performed in [50] provide a clear exposition in terms of connectivity, reliability, scalability, and behavior for LoS or stationary and dynamic point measurements between nodes in the network [51,52].
It was notable that in tests of the engineered system that at around 9 ms, the connection was blocked, which prevented the exchange of information and caused the communication to drop. Subsequently, the device was able to receive GPS coordinates and messages, reestablishing communication for a short period. Analysis of this system behavior suggests that in urban areas with heavy traffic and high dynamics, loss of connection and data transmission are affected. Data flow was interrupted at a distance of approximately 300–350 m since the last display. This distance was covered on a stretch of road with a level difference of 50–60 m and an inclination of more than 30°. The resumption of communication occurred at the maxim point, calculated over a straight-line distance of about 800 m and with a total level difference of 75 m from the transmit point. Under these conditions, the measurements do not indicate a notable feature, as the transfer rate is low and the number of packets received relative to those transmitted decreases exponentially. It is important to note that these scenarios were realized using only two OBU-Mk5 modules, without an RSU [53] or other type of ITS control center, which could have retrieved the information from node to node, optimizing the reception. According to Figure 1, we can expose the whole scenario tested in the presented case and using DSRC.
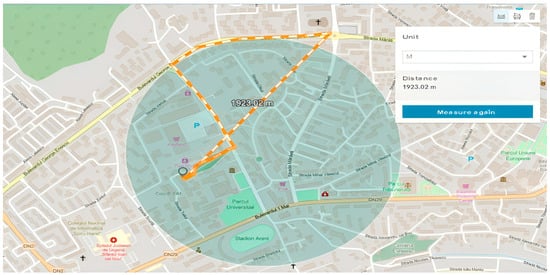
Figure 1.
Representative area tested to expose the measurements performed by DSRC—C-V2X communications.
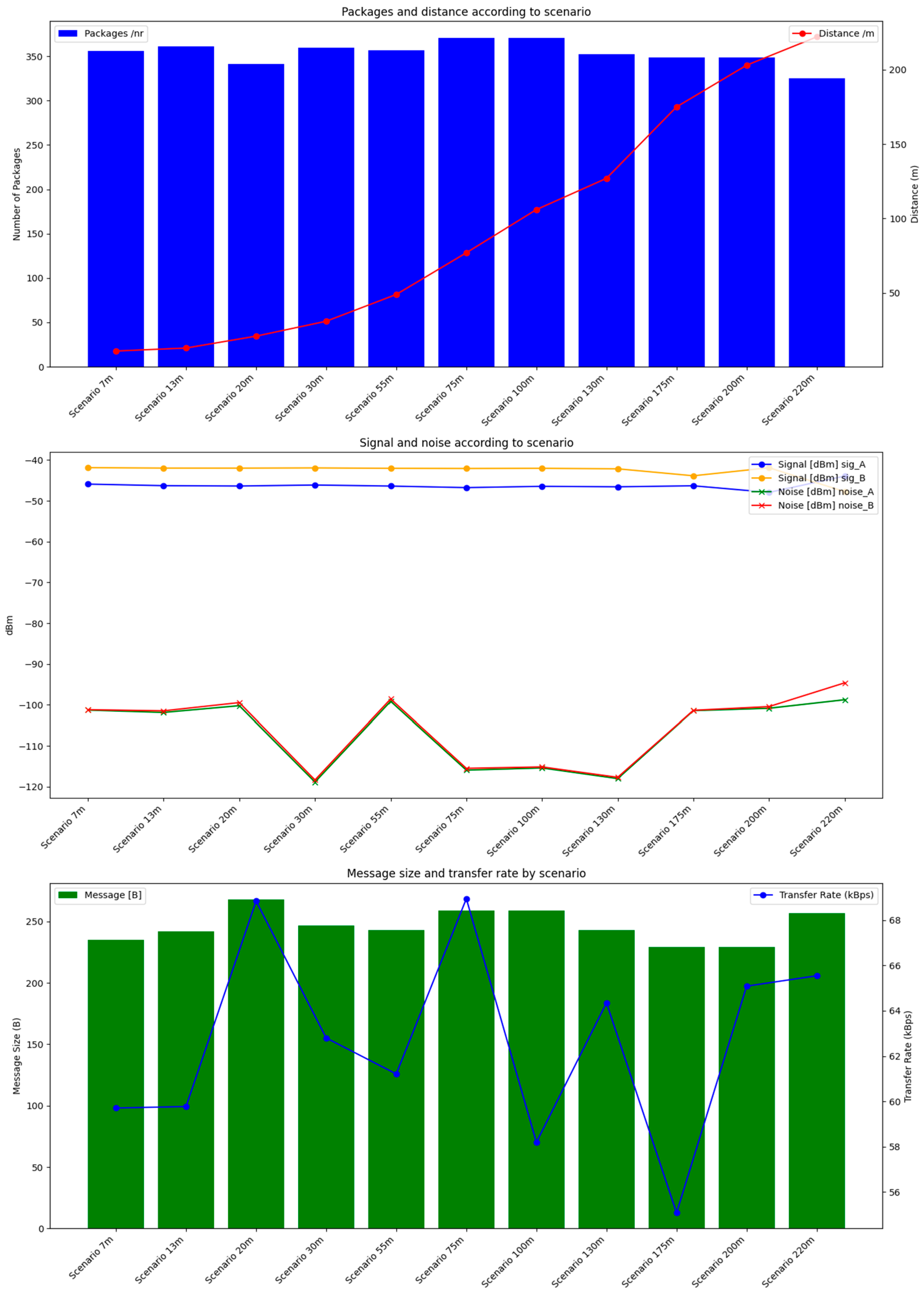
By directly analyzing the information that we obtain as a result of the measurements, we can say that decreasing speed is a measure to protect the communication link. When the signal quality decreases significantly, there is also a direct loss of access points created in the vehicular network. Although that absolute average error that we can exhibit is around 5 to 7 m, using a Gaussian distribution we can say that the standard deviation is 0.5 m, or is even negligible in conditions of extremely high data volume. When the degree of mobility is high and there are measurements between vehicles or between stationary points and vehicles through the level difference of the coordinates, deviations of about 7 m are also present in Figure 2. Each initialization function returns a descriptor (integer variable) file, allowing access to the updated interfaces. In the absence of information available on the CAN interface, default values are loaded to avoid locking the whole system. Query and event limiting functions, as well as the definition of descriptors, are used to filter information. The essential data that we target for timely extraction and communication within this system include: Min-Max of data packets, transfer rate, longitude, latitude, distance, transmit/receive signal, and transmit/receive noise. When we talk about dynamics in an outdoor environment, we refer to elements and objects that can appear and distort or disturb the test area in various ways. Under current conditions, the test environment is expanding such that the parking lot opens onto a heavily traveled section of road. Thus, in this context, the analysis process becomes much more complex and the GPS identification in the Rx—Tx direction may suffer message or data packet distortions. Next, we denote with C the car under study. GPS observations extracted by BSMs describe the location as xi = (Li, li), i ∈ {0, . . Nd GPPS} recorded at time ti, where Li and li represent the longitude and latitude of location i, respectively.
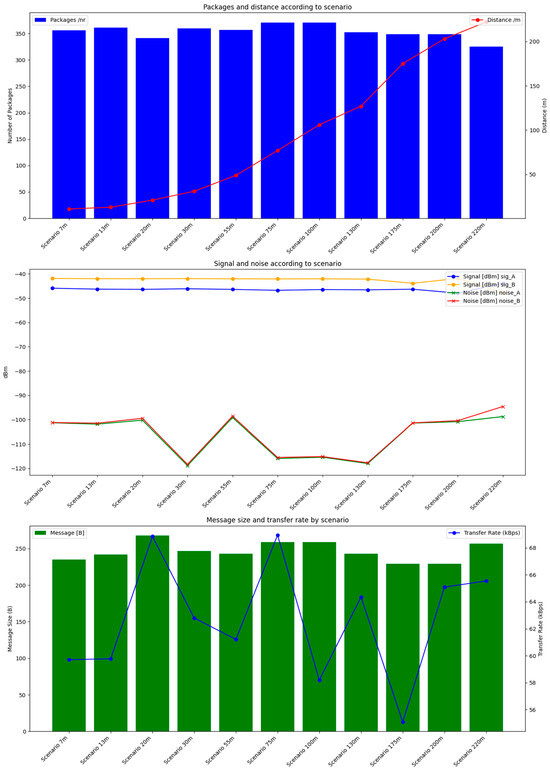
Figure 2.
Data cohesion at simulated scenario level over more than 220 m distances from reception and data interpretation.
Therefore, the mean absolute error may vary depending on the speed at the time of the measurements; if in this case there is an upward trend, this is caused by the directly proportional relationship between speed and travel distance. Even in these cases, we are talking about covering a heavily trafficked area with a vehicle density exceeding 300–500/min at peak hours on a stretch of road where the maximum capacity is approximately 2–3 times lower; it is about aspects related to the existing infrastructure and how many vehicles can transition through the analyzed area from the perspective of the way in which the respective road sector is thought out. Under the conditions of the assimilation of a new dynamic approach from an architectural point of view and the ITS type system, everything must be corroborated with autonomous vehicles. According to [54], it is possible to reach a transition of over 2000 vehicles, i.e., over 25–30 of vehicles per minute, in ideal conditions.
Knowing that the format and structure of the standard in the message transmission procedure must contain a header with all necessary fields, algo-criteria filtering is applied. When the accuracy of the GPS signal decreases, system-wide corrections are applied to correct the uncertainty, with the caveat that the variation should be around 2–3 for each coordinate. According to the tests, it has been observed that in the case of the routes with variations, the communication is affected and we do not have LoS. The communication can be disturbed even at 50 m, but to correct this we increase the effective radiated power (EIRP) [55], reaching about 30 dBm. The results of the whole scenario can be seen in Figure 3. We note that these results have been obtained by a system already tested and presented in the article referred to at the beginning of the current chapter, without the need to reiterate the information.
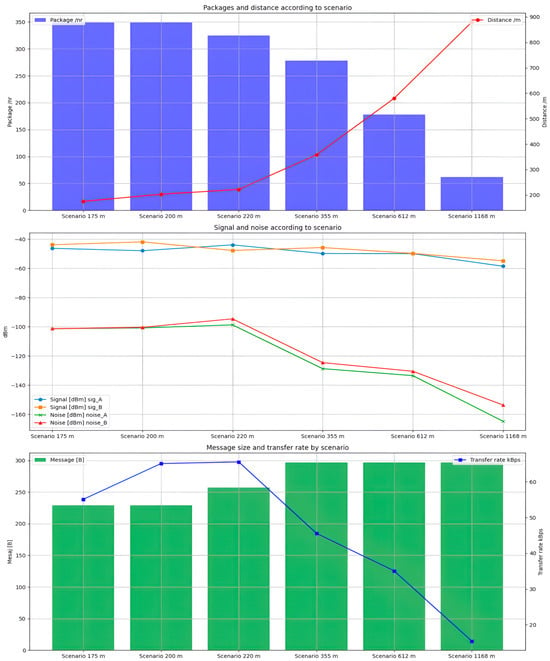
Figure 3.
Data cohesion at simulated scenario level over distances of more than 600 m from reception and data interpretation.
3.1. Handling Particular Cases and Re-Testing Scenarios at Infrastructure Level Using LoRa 2.4 GHz
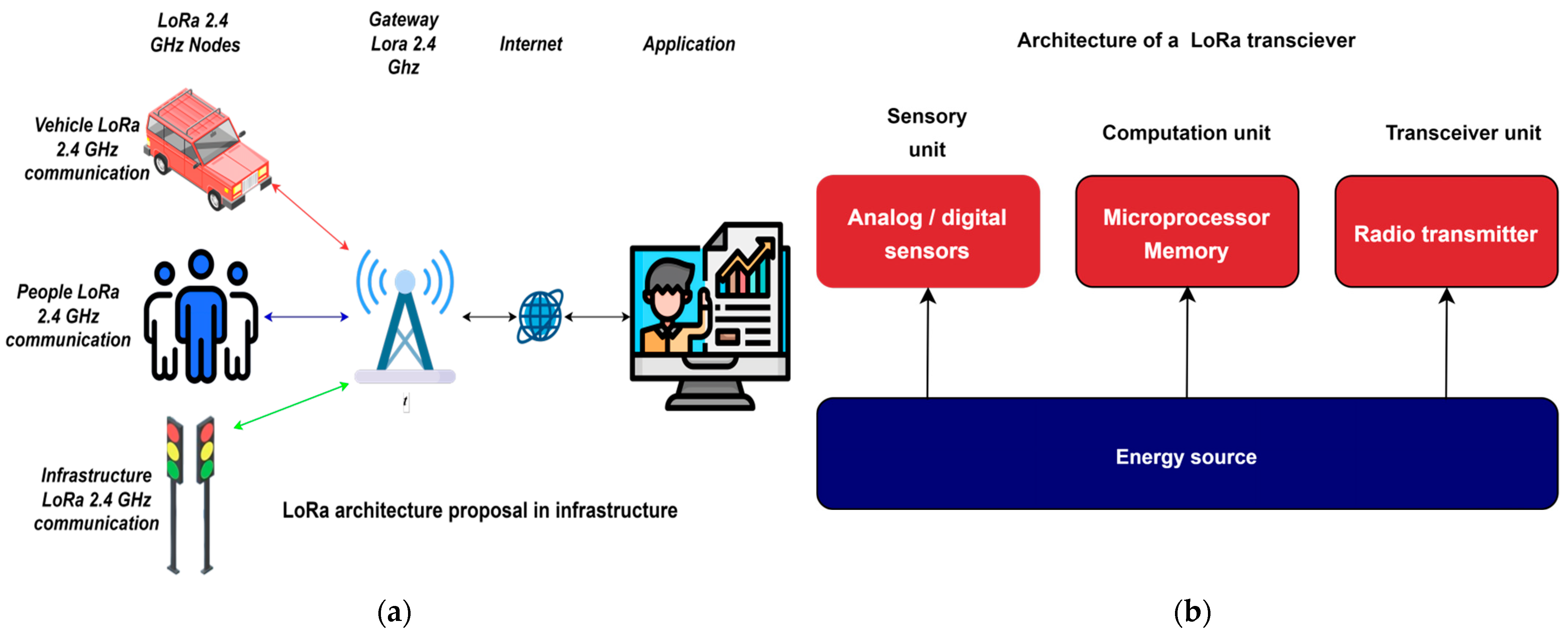
The architecture presented in the paper illustrates a communication system based on LoRa technology at 2.4 GHz frequency, used to connect various types of nodes (V2V, V2I, V2P) to an end application via the Internet. This architecture integrates multiple components and technologies to ensure efficient and reliable communication in a dynamic urban environment.
LoRa 2.4 GHz nodes are devices that communicate using LoRa technology at the 2.4 GHz frequency and are divided into three main categories: vehicles, people, and infrastructure. Vehicles are equipped with LoRa nodes to transmit data on position, vehicle status, fuel consumption, speed, direction, and other information relevant to safety and traffic management. Wearable nodes can transmit data on location, heart rate, physical activity level, or other personal parameters essential for health monitoring. Infrastructure, such as traffic lights, digital billboards, and other smart devices, is equipped with LoRa nodes to communicate traffic information, equipment status, weather conditions, and other data relevant for efficient urban traffic management [56].
The LoRa 2.4 GHz Gateway is a central point of the reception and transmission of data collected from LoRa nodes [57]. It communicates bidirectionally with the nodes and transmits the data to the Internet. The Gateway serves as a hub that aggregates data from the nodes and sends them to servers or analysis applications. The gateway can also perform data pre-processing to filter out irrelevant information and reduce the amount of data transmitted, thus optimizing the use of network resources. The Internet is the means of transporting data from the gateway to the end applications. Data are transmitted over Internet networks to analysis servers or platforms where they are stored, processed, and analyzed. These platforms can use machine learning and artificial intelligence algorithms to extract valuable insights from the collected data and generate real-time predictions or alerts. The app is the final interface where data are collected, analyzed, and presented to users. Users can access the app to visualize real-time data, generate detailed reports, and receive alerts based on predefined parameters. The application can also provide control and monitoring functions for infrastructure equipment, allowing rapid intervention when needed.
Figure 4 illustrates the integration of LoRa 2.4 GHz technology into Intelligent Traffic Systems (ITS), showing two main aspects: the architectural proposal for the infrastructure and the architecture of a LoRa transceiver. LoRa 2.4 GHz nodes are distributed in vehicles, pedestrians, and road infrastructure (traffic lights, traffic signs). These nodes enable vehicle-to-vehicle (V2V), vehicle-to-pedestrian (V2P), and vehicle-to-infrastructure (V2I) communication, facilitating the exchange of information critical for road safety and efficiency. The LoRa 2.4 GHz gateway Figure 4a collects data from all nodes and relays them to central applications over the internet. It acts as a central hub, aggregating and processing data for real-time analysis and monitoring. The LoRa transceiver Figure 4b is composed of analog and digital sensors that capture data from the environment. These data are processed by a microprocessor, which applies specific algorithms to extract useful information. The processed data are then transmitted through a radio transmitter using LoRa technology. The power supply provides continuous power to all components of the transceiver, ensuring reliable operation. The integration of the transceiver with the gateway and the Internet network enables efficient transmission of data to end applications, where it is collected, analyzed, and presented to users.
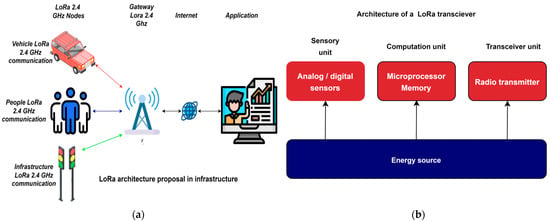
Figure 4.
Generic architectures for the presentation of LoRa technology and its introduction in the structure of intelligent traffic systems: (a) LoTa architecture proposal in infrastructure; (b) Architecture of a LoRa Transceiver.
The communication flow starts with the transmission of data from LoRa nodes on vehicles, people, and infrastructure to the LoRa gateway at 2.4 GHz. The transmitted data may include information about location, operational status, environmental parameters, traffic conditions, and more. The gateway collects these data and forwards them over the Internet, a process that may include pre-processing the data to reduce the transmitted volume and filter out irrelevant information. The data then reach the end application, where they are stored, processed, and analyzed. Users can view the data in real time, generate reports, and receive alerts based on predefined parameters, helping to improve the safety and efficiency of urban traffic.
The general operation of the transceiver starts with the sensors in the sensor unit capturing data from the environment and sending these data to the computing unit. The microprocessor in the computing unit processes the data, applying specific algorithms to extract useful information. The processed data are then sent to the transceiver unit, where they are transmitted via radio transmitter using LoRa technology. The whole process is powered by an energy source, which ensures continuous and reliable operation of the transceiver. The sensor unit is responsible for capturing data from the environment. This may include analog or digital sensors that measure parameters such as location, motion, and environmental conditions. The sensors collect the raw data and send them to the computing unit for processing. The computing unit consists of a microprocessor and memory. The microprocessor processes data received from sensors, running algorithms for analysis and filtering. Memory is used to temporarily store data and programs running on the microprocessor. This unit is essential for pre-processing data before they are transmitted. The Transceiver Unit includes a radio transmitter that transmits the processed data to a gateway or other network devices. It uses 2.4 GHz LoRa technology to provide long-distance communications with low power consumption. The transceiver unit is responsible for transmitting data and receiving commands or updates from other devices on the network.
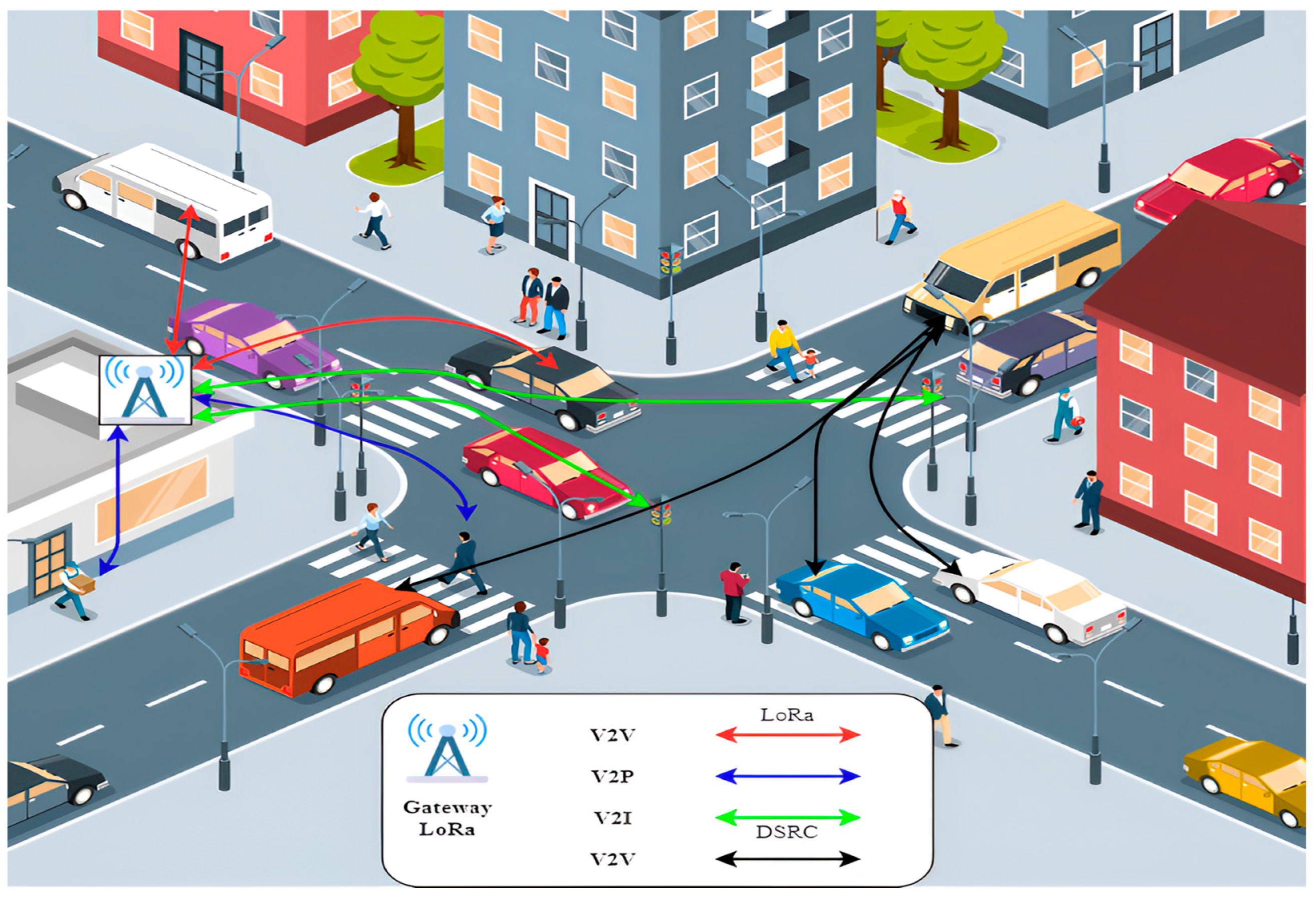
The efficient integration of these units ensures a continuous and reliable flow of information between the environmental sensors and the central data collection points, thus facilitating real-time monitoring and management of various parameters. LoRa technology, with its advantages of low power consumption and long-distance transmission capability, is ideal for IoT applications in urban and rural environments, where wide coverage and long battery life of the LoRA devices is essential. Figure 5 shows the interconnectivity offered by LoRa for the other types of communication protocols, such as V2V, V2I, and V2P, and how LoRa re-realizes these procedures for road and pedestrian infrastructures.
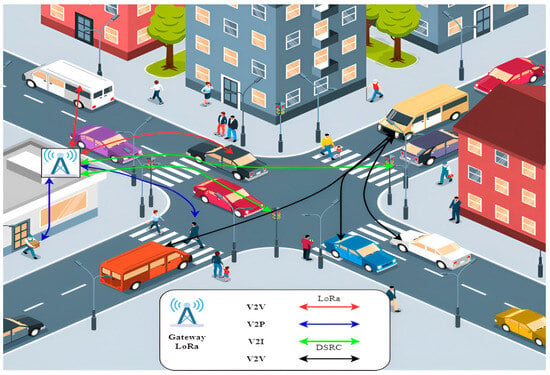
Figure 5.
The representative diagram in which all the discussed protocols are introduced and how they are interconnected in the ITS systems dedicated to traffic management in urban environments.
The LoRa 2.4 GHz network consists of multiple nodes, which can be vehicles, infrastructure (traffic lights, traffic signs), and devices carried by pedestrians. The LoRa Gateway acts as a central point to collect data from all nodes in the network and relays these data to a central application over the Internet.
3.2. Practical and Deterministic Analysis of LoRa Capabilities within Intelligent Transport Systems and Smart Cities
In the first step we evaluated the signal spread computation modalities, but also how LoRa performs, and for this aspect we have to validate each parameter, including signal strength, bit error rate (BER), and latency. We can say that one of the most essential formulas used to calculate the signal loss for distances is the Friis equation for the attenuation of a signal in free space:
is the received signal strength (dBm), represent the power of the transmitted signal, is the transmitter antenna gain (dBi), is the gain of the receiver antenna (dBi), and represents loss of track (d). Band can be calculated as follows:
d is the distance between transmitter and receiver (m), f represents the signal frequency (Hz), and c is the speed of light (3 × 108 m/s). The distance from the term d, when , represents the path loss due to the distance the signal travels. As distance increases, path loss increases logarithmically. When we discuss the term frequency, accounts for the frequency dependence of the path loss. Higher frequencies experience higher losses
However, we also consider the calculation of the Bit Error Rate (BER), being a key performance indicator for LoRa networks, and in this case, we also have to take into account the Chirp Spread Spectrum; we treat this case as follows:
SNR is the signal-to-noise ratio and is calculated as follows:
where .
Latency calculation aspects were also taken into account, and the latency is related to the Time on Air (ToA) for a packet, which is also influenced by the spreading factor (SF), bandwidth (BW), or coding rate (CR):
Each element being noted in the following form: number of preamble bytes, number of payload bytes, and , bit rate, which we calculate as follows:
where SF stands for Spreading Factor and BW for Bandwidth. In all these cases, research has also been extended to the way in which the path can be lost, namely Path Loss in dB:
For the connection given at the level of controlled measurements in dynamic environments, we have channeled our attention to the LoRa connection to highlight the reliability, consumption, and robustness, but also the low costs compared to other technologies. Table 3 shows the practical parameters and data used in the implementation of the LoRa 2.4 GHz communication prototype. These are essential for evaluating system performance under real-world conditions. The power of the transmitted signal (Pt) is 14 dBm. This is the effective signal strength emitted by the transmitter. The transmitter antenna gain (Gt) is 2 dBi. This measures how effectively the antenna directs the emitted power. The antenna gain of the receiver (Gr) is 8 dBi, indicating the efficiency of the antenna in receiving the signal. The distance (d) between transmitter and receiver is 500 m, and the signal must cover this distance.
Table 3.
Practical parameters and data for LoRa 2.4 GHz prototype for implementation.
The frequency (f) used for transmission is 2.4 GHz, characteristic of the LoRa technology used. The noise spectral density (N0) is −174 dBm/Hz. This is the noise level present in the transmission channel. Based on this information, the received signal strength can be calculated using the parameters in the table. These parameters are crucial for determining the performance of the communication system and for optimizing the settings needed to ensure reliable and efficient data transmission.
We calculate the received signal strength based on the following information:
To find the SNR we have the following relation:
and for BER, we have the following calculated relation:
Therefore, we end with a final calculation, that of ToA, when we assume SF = 10, BW = 125 kHz, and payload = 20 bytes:
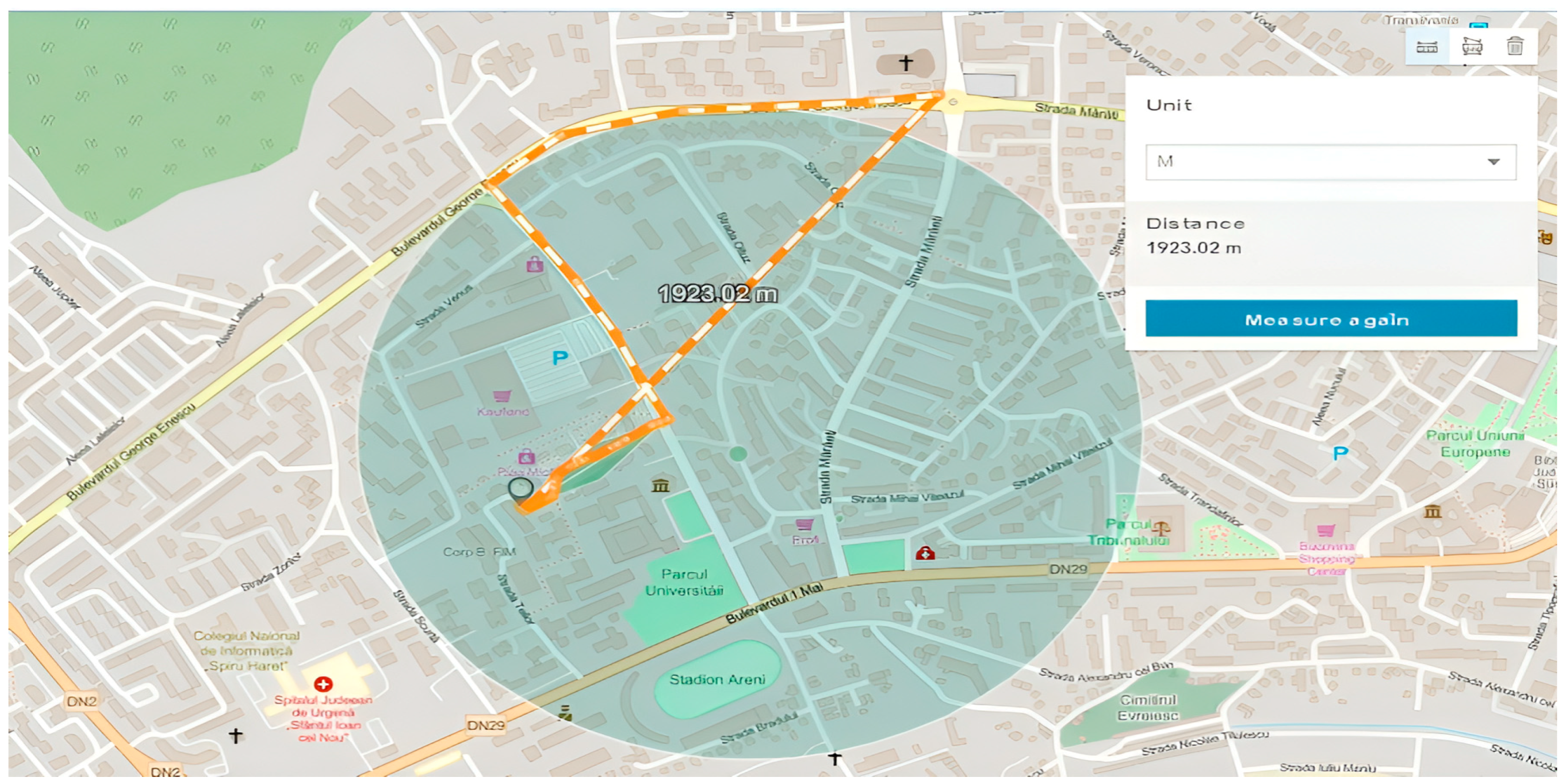
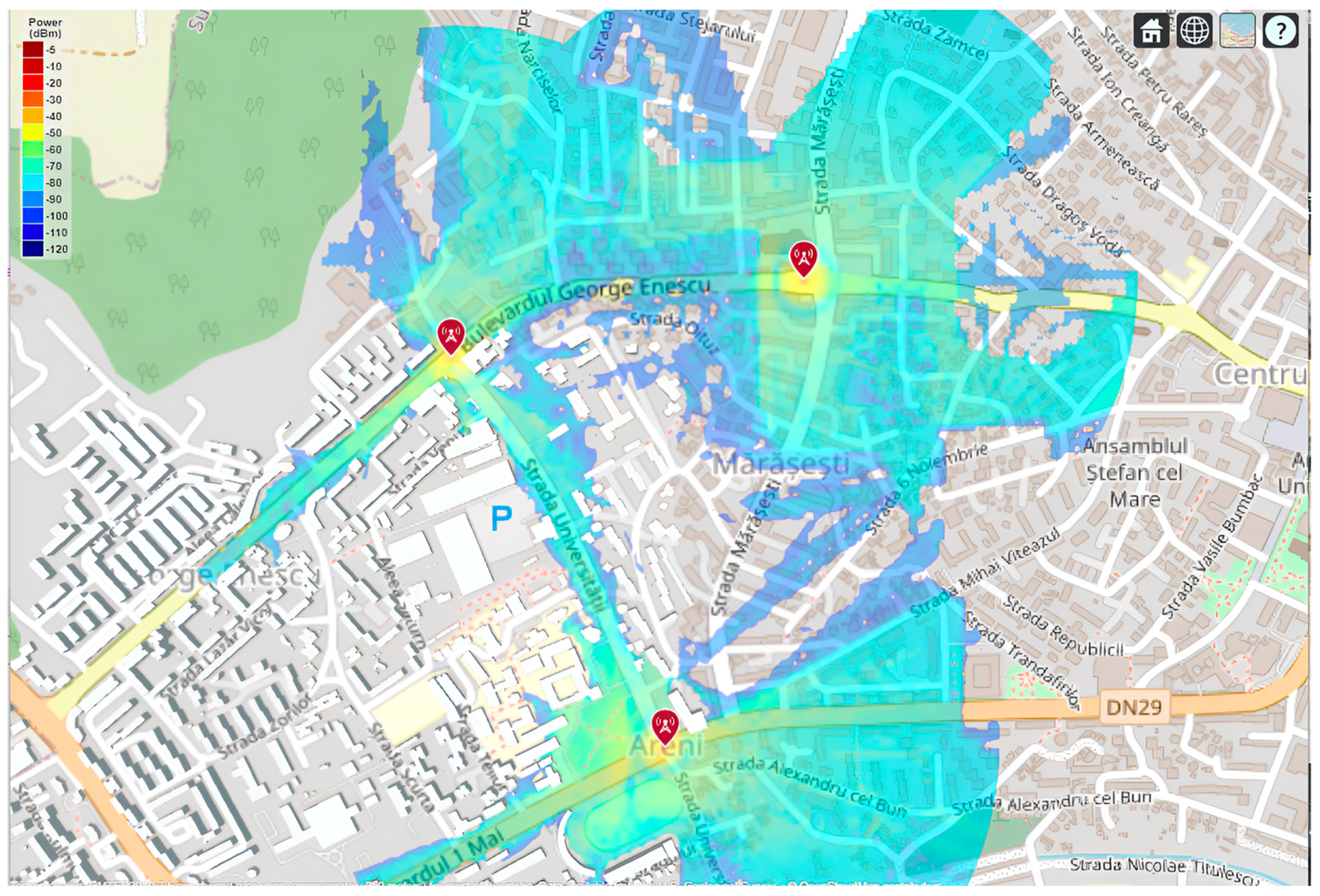
We can say that these calculations expose the way in which the performance of the proposed LoRa network has been evaluated, highlighting different conditions or settings, as this aspect is also based on an analysis for performance optimization and ensuring stable communication between vehicular applications and their connection to ITS systems. In the context of developing sensor networks for smart city applications, analyzing the propagation of radio signals is essential to ensure optimal coverage and high performance. In this chapter, we present the use of a ray tracing model to evaluate the propagation of LoRa signals at 2.4 GHz frequency in a complex urban area. This approach is comparable to previous evaluations carried out for DSRC and C-V2X technologies, providing a comprehensive insight into the efficiency of vehicular communication networks. The modeling of radio signal propagation was performed by a 3D simulation using ray tracing techniques [58]. These techniques allow detailed analysis of signal interaction with obstacles in the environment, such as buildings, vegetation, and other urban structures. The simulation was carried out on a digital map of an urban area, providing a realistic context for evaluating the performance of the LoRa network. Similarly, simulations for DSRC and C-V2X involved detailed analysis of signal reflections and refractions in densely built urban environments (see Figure 6).
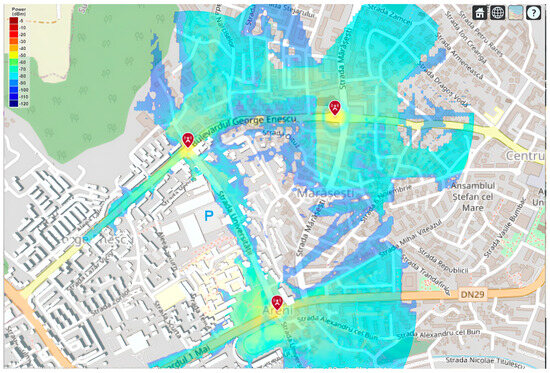
Figure 6.
Representative area tested to expose the measurements performed by LoRa 2.4 GHz.
For this testing, LoRa modules, strategically placed in various locations in the study area, were used. The main parameters of the simulation include: 2.4 GHz signal frequency, transmission power according to LoRa standard specifications, propagation environments such as buildings, open spaces, green areas, and a ray tracing model that calculates the reflections, refractions, and diffractions of the radio signal. The results of this analysis provide a direct comparison with the performance observed in DSRC and C-V2X networks. While DSRC and C-V2X have demonstrated the ability to support critical vehicular communications with low latencies and high transmission rates, LoRa at 2.4 GHz has the advantage of extended coverage and low power consumption, albeit with lower throughput and higher latency. These differences emphasize the importance of choosing the appropriate technology depending on the specific application requirements.
Thus, by applying ray tracing modeling and 3D simulations, this chapter contributes to the understanding of how 2.4 GHz LoRa can be effectively integrated into vehicular and smart city communication infrastructure, complementing DSRC and C-V2X technologies to create a smart and interconnected transportation ecosystem.
The testing results are presented in the form of a three-dimensional visualization, which illustrates signal propagation within the complex urban environment. The generated image highlights the following key aspects:
- ✓
- Areas of signal intensity are represented by a color range from blue to green. Regions colored in green indicate optimal signal coverage, while areas colored in blue signal low signal strength. This visual coding allows a quick and accurate assessment of network performance at different locations in the urban area.
- ✓
- Buildings and other structures in the urban environment create shadows and reflections that adversely affect radio signal propagation. These phenomena are illustrated in the 3D visualization by chromatic variations in the vicinity of obstacles, highlighting how these structures disturb and reflect the signal. The analysis of these effects allows the identification of critical points where the signal is attenuated, thus helping to optimize the positioning of network nodes to ensure the most uniform and robust coverage.
This advanced visual approach provides a detailed insight into the performance of the LoRa network at 2.4 GHz, facilitating the understanding of the complexity of interactions between radio signals and the urban environment. By integrating these observations with previous theoretical and empirical analyses, we can develop effective strategies for deploying vehicular communication and sensor networks in the context of smart cities.
4. Discussion and Conclusions
In conclusion, this research has demonstrated the potential of LoRa technology at 2.4 GHz for smart city applications and vehicular communications. The study included a detailed signal propagation analysis using advanced ray tracing techniques, as well as performance evaluation in terms of bit error rate (BER), latency, and the ability to sustain packet handover.
While the paper highlights the many advantages of integrating DSRC, C-V2X, and LoRa 2.4 GHz technologies in intelligent transportation systems (ITS), it is important to recognize the limitations and prospects for further research. One of the main limitations is the interference in the 2.4 GHz band used by LoRa, which may affect the reliability of data transmission in dense urban environments. Also, variable latencies and transmission rates between different protocols may require further optimizations to ensure efficient interoperability.
Simulations and empirical measurements have shown that LoRa 2.4 GHz is capable of covering distances comparable to DSRC and C-V2X systems. The signal strength distribution showed robust coverage with strong signal areas in most of the tested locations. In complex urban areas, LoRa technology demonstrated excellent penetration capability and resistance to interference from obstacles such as buildings and vegetation.
A major advantage of using LoRa 2.4 GHz is the significantly lower cost compared to DSRC and C-V2X technologies. LoRa devices are more affordable and have much lower power consumption, making them ideal for large-scale deployments in urban and vehicular sensor networks. This cost-effectiveness enables the deployment of large networks without compromising performance. Performance analysis, including BER and latency evaluation, showed that LoRa 2.4 GHz could transmit messages quickly and efficiently while maintaining a high level of reliability. Although error rates increase at longer distances and in dense obstacle environments, the technology demonstrated robust packet recovery and retransmission capabilities, thus ensuring communication continuity. A promising direction for future research is the integration of LoRa technologies with DSRC and C-V2X to create hybrid vehicular communication networks. This integration could combine the advantages of each technology, thus providing extended coverage, low latency, and increased reliability. Future studies should focus on developing interoperability protocols and optimizing network resources to maximize the benefits of this synergy.
In order to validate and extend the findings of this research, it is necessary to carry out large-scale case studies and scalability tests in various urban and rural environments. These studies should include a wide range of usage scenarios and analyze the performance of the network under various conditions, including heavy traffic situations and the presence of significant obstacles. LoRa 2.4 GHz has enormous potential for integration into IoT and smart city infrastructures. Future research should focus on developing innovative solutions that leverage LoRa’s extended coverage capacity and low power consumption to improve various aspects of urban management, such as traffic monitoring, waste management, and energy resource optimization.
Given the importance of vehicular communications and smart city applications, security and data protection are essential. Future research must address the development of advanced security mechanisms to protect the integrity and confidentiality of data transmitted over LoRa networks, thus ensuring a safe and reliable implementation.
By addressing these research directions, LoRa technology at 2.4 GHz can become a central pillar in the development of vehicular communication networks and smart city infrastructures, thus contributing to the creation of more efficient, safe, and connected urban environments.
In terms of future perspectives, future research should focus on improving resource management algorithms to optimize the combined use of DSRC, C-V2X, and LoRa. It would also be beneficial to develop mechanisms to dynamically adjust transmission parameters in real time to respond adaptively to changing network conditions and application requirements. Further studies are needed to assess the performance of these technologies in different traffic scenarios and to explore their potential in supporting fully autonomous vehicles and smart mobility infrastructures. These directions will help create more resilient and adaptable ITS solutions for the smart cities of the future.
Author Contributions
Conceptualization, E.Z. and Ș.H.; methodology, E.Z.; software, E.Z.; validation, E.Z. and Ș.H.; formal analysis, E.Z.; investigation, E.Z.; resources, E.Z.; data curation, Ș.H.; writing—original draft preparation, E.Z.; writing—review and editing, E.Z.; visualization, Ș.H.; supervision, E.Z.; project administration, E.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Acknowledgments
This work is supported by NetZeRoCities Competence Center, funded by European Union—NextGenerationEU and Romanian Government, under National Recovery and Resilience Plan for Romania, contract no. 760007/30.12.2022 with Romanian Ministry Of Research, Innovation and Digitalisation, through specific research project P4—Smart Mobility and Infrastructure.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Road Traffic Injuries. Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 8 July 2024).
- Decade of Action for Road Safety 2021–2030. Available online: https://www.who.int/teams/social-determinants-of-health/safety-and-mobility/decade-of-action-for-road-safety-2021-2030 (accessed on 8 July 2024).
- Safety|US Department of Transportation. Available online: https://www.transportation.gov/priorities/safety (accessed on 8 July 2024).
- Texts Adopted—EU Road Safety Policy Framework 2021–2030—Recommendations on Next Steps towards “Vision Zero”—Wednesday. 6 October 2021. Available online: https://www.europarl.europa.eu/doceo/document/TA-9-2021-0407_EN.html (accessed on 8 July 2024).
- Wiseman, Y. Autonomous Vehicles. In Encyclopedia of Information Science and Technology, 5th ed.; IGI Global: Hershey, PA, USA, 2020; pp. 1–11. ISBN 9781799834809. [Google Scholar]
- Valean, A.I. EU Road Safety Policy Framework 2021–2030-Next Steps towards “Vision Zero”; European Commission: Brussels, Belgium, 2019. [Google Scholar]
- IEEE Std 802.11-2020 (Revision of IEEE Std 802.11-2016); IEEE Standard for Information Technology--Telecommunications and Information Exchange between Systems-Local and Metropolitan Area Networks--Specific Requirements-Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications-Redline. 26 February 2021; pp. 1–7524.
- IEEE Std 802.11p-2010 (Amendment to IEEE Std 802.11-2007 as amended by IEEE Std 802.11k-2008, IEEE Std 802.11r-2008, IEEE Std 802.11y-2008, IEEE Std 802.11n-2009, and IEEE Std 802.11w-2009); IEEE Standard for Information Technology--Local and Metropolitan Area Networks--Specific Requirements--Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments. 15 July 2010; pp. 1–51. [CrossRef]
- Pérez, D.V.; Linnartz, J.P.M. Modelling message flows in Networked Lighting Control Systems using Trickle and CSMA. In Proceedings of the 2014 IEEE 21st Symposium on Communications and Vehicular Technology in the BeNeLux, Delft, The Netherlands, 10 November 2014; ISBN 9781479980307. [Google Scholar]
- Miao, Y.; Dong, X.; Bourassa, M.A.; Zhu, D. Effects of Different Wave Spectra on Wind-Wave Induced Doppler Shift Estimates. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September 2020; Institute of Electrical and Electronics Engineers Inc.: New York City, NY, USA, 2020; pp. 5705–5708. [Google Scholar]
- Rajput, N.S. Measurement of IEEE 802.11p Performance for Basic Safety Messages in Vehicular Communications. In Proceedings of the 2018 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Indore, India, 16–19 December 2018. [Google Scholar]
- Yang, Z.; Wei, L. Logic Circuit and Memory Design for In-Memory Computing Applications using Bipolar RRAMs. In Proceedings of the 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, 26–29 May 2019; ISBN 9781728103976. [Google Scholar]
- Cao, M.; Shuai, Q.; Li, V.O. Emergency Vehicle-Centered Traffic Signal Control in Intelligent Transportation Systems. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference—ITSC, Auckland, New Zealand, 27–30 October 2019; ISBN 9781538670248. [Google Scholar]
- Najm, W.G.; Koopmann, J.; Smith, J.D.; Brewer, J. Frequency of Target Crashes for IntelliDrive Safety Systems; National Highway Traffic Safety Administration: Washington, DC, USA, 2010. [Google Scholar]
- European Transport Policy. Europe on the Move—Volume 1|EESC. Available online: https://www.eesc.europa.eu/en/our-work/publications-other-work/publications/european-transport-policy-europe-move-volume-1 (accessed on 8 July 2024).
- Kang, Y.; Tian, C. Study on the Emission of Connected Autonomous Vehicle Considering the Control of Electronic Throttle Opening. World Electr. Veh. J. 2024, 15, 233. [Google Scholar] [CrossRef]
- Neugebauer, M.; Żebrowski, A.; Esmer, O. Cumulative Emissions of CO2 for Electric and Combustion Cars: A Case Study on Specific Models. Energies 2022, 15, 2703. [Google Scholar] [CrossRef]
- Wittmann, M.; Neuner, L.; Lienkamp, M. A Predictive Fleet Management Strategy for on-Demand Mobility Services: A Case Study in Munich. Electronics 2020, 9, 1021. [Google Scholar] [CrossRef]
- Mertens, J.C.; Knies, C.; Diermeyer, F.; Escherle, S.; Kraus, S. The Need for Cooperative Automated Driving. Electronics 2020, 9, 754. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, R.; Wang, Y.; Lv, S. Machine Learning-Based Driving Style Identification of Truck Drivers in Open-Pit Mines. Electronics 2020, 9, 19. [Google Scholar] [CrossRef]
- Zhang, T.; Zhou, W.; Meng, F.; Li, Z. Efficiency Analysis and Improvement of an Intelligent Transportation System for the Application in Greenhouse. Electronics 2019, 8, 946. [Google Scholar] [CrossRef]
- Wu, Y.; Lee, W.W.; Gong, X.; Wang, H. A Hybrid Intrusion Detection Model Combining SAE with Kernel Approximation in Internet of Things. Sensors 2020, 20, 5710. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Liu, W.; Liu, Q.; Zheng, X.; Sun, K.; Huang, C. Complying with ISO 26262 and ISO/SAE 21434: A Safety and Security Co-Analysis Method for Intelligent Connected Vehicle. Sensors 2024, 24, 1848. [Google Scholar] [CrossRef] [PubMed]
- Arena, F.; Pau, G.; Severino, A. A Review on IEEE 802.11p for Intelligent Transportation Systems. J. Sens. Actuator Netw. 2020, 9, 22. [Google Scholar] [CrossRef]
- Iriqat, S.; Yenikaya, S.; Secmen, M. Dual-Band 2 × 1 Monopole Antenna Array and Its MIMO Configuration for WiMAX, Sub-6 GHz, and Sub-7 GHz Applications. Electronics 2024, 13, 1502. [Google Scholar] [CrossRef]
- IEEE Std 802.11a-1999; IEEE Standard for Telecommunications and Information Exchange between Systems-LAN/MAN Specific Requirements-Part 11: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications: High Speed Physical Layer in the 5 GHz Band. 30 December 1999; pp. 1–102. [CrossRef]
- Souri, A.; Zarei, M.; Hemmati, A.; Gao, M. A Systematic Literature Review of Vehicular Connectivity and V2X Communications: Technical Aspects and New Challenges. Int. J. Commun. Syst. 2024, 37, e5780. [Google Scholar] [CrossRef]
- Batalla, J.M.; Sujecki, S.; Oko, J.; Kelner, J.M. Cost-Effective Measurements of 5G Radio Resources Allocation for Telecom Market Regulator’s Monitoring. In Proceedings of the PE-WASUN 2022—Proceedings of the 19th ACM International Symposium on Performance Evaluation of Wireless Ad Hoc, Sensor, and Ubiquitous Networks, Montreal, QC, Canada, 24–28 October 2022; pp. 83–90. [Google Scholar] [CrossRef]
- Garrott, W.R. The anticipated effect of improvements to automotive electronics on safety during the years 2009 through 2015. In Proceedings of the 2008 IEEE International Conference on Vehicular Electronics and Safety, Columbus, OH, USA, 22–24 September 2008; IEEE Xplore: Piscataway, NJ, USA, 2008. ISBN 9781424423606. [Google Scholar]
- Zhang, Y.; Zhang, J. Design and Optimization of Cluster-Based DSRC and C-V2X Hybrid Routing. Appl. Sci. 2022, 12, 6782. [Google Scholar] [CrossRef]
- Petrov, T.; Sevcik, L.; Pocta, P.; Dado, M. A Performance Benchmark for Dedicated Short-Range Communications and Lte-Based Cellular-V2x in the Context of Vehicle-to-Infrastructure Communication and Urban Scenarios. Sensors 2021, 21, 5095. [Google Scholar] [CrossRef] [PubMed]
- IEEE Std 802.11bd-2022 (Amendment to IEEE Std 802.11-2020 as amended by IEEE Std 802.11ax-2021, IEEE Std 802.11ay-2021, IEEE Std 802.11ba-2021, IEEE Std 802.11-2020/Cor 1-2022, and IEEE Std 802.11az-2022); IEEE Standard for Information Technology--Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks--Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 5: Enhancements for Next Generation V2X. 10 March 2023; pp. 1–144. [CrossRef]
- Nguyen, H.; Noor-A-Rahim, M.; Liu, Z.; Jamaludin, D.; Guan, Y.L. A Semi-Empirical Performance Study of Two-Hop DSRC Message Relaying at Road Intersections. Information 2018, 9, 147. [Google Scholar] [CrossRef]
- Albattah, W.; Habib, S.; Alsharekh, M.F.; Islam, M.; Albahli, S.; Dewi, D.A. An Overview of the Current Challenges, Trends, and Protocols in the Field of Vehicular Communication. Electronics 2022, 11, 3581. [Google Scholar] [CrossRef]
- Zhao, P.; Wang, X.; Zhang, K.; Jin, Y.; Zheng, G. Doppler Modeling and Simulation of Train-to-Train Communication in Metro Tunnel Environment. Sensors 2022, 22, 4289. [Google Scholar] [CrossRef] [PubMed]
- Choi, J.; Ahn, S. A 5.9 GHz Channel Characterization at Railroad Crossings for Train-to-Infrastructure (T2I) Communications. Electronics 2023, 12, 2400. [Google Scholar] [CrossRef]
- Wang, T.; Hussain, A.; Cao, Y.; Gulomjon, S. An Improved Channel Estimation Technique for Ieee 802.11p Standard in Vehicular Communications. Sensors 2019, 19, 98. [Google Scholar] [CrossRef] [PubMed]
- ICICI-BME 4. 2015 Bandung; Bandung Institute of Technology; IEEE International Conference on Service-Oriented Computing and Applications; International Conference on Instrumentation, C.; ICICI-BME 4 2015.11.02-03 Bandung. In Proceedings of the 2015 4th International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 2–3 November 2015; ISBN 9781467378000.
- Khan, U.A.; Lee, S.S. Multi-Layer Problems and Solutions in VANETs: A Review. Electronics 2019, 8, 204. [Google Scholar] [CrossRef]
- Hota, L.; Nayak, B.P.; Kumar, A.; Sahoo, B.; Ali, G.G.M.N. A Performance Analysis of VANETs Propagation Models and Routing Protocols. Sustainability 2022, 14, 1379. [Google Scholar] [CrossRef]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A Study of Lora: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar] [CrossRef]
- Lima, W.G.; Lopes, A.V.R.; Cardoso, C.M.M.; Araújo, J.P.L.; Neto, M.C.A.; Tostes, M.E.L.; Nascimento, A.A.; Rodriguez, M.; Barros, F.J.B. LoRa Technology Propagation Models for IoT Network Planning in the Amazon Regions. Sensors 2024, 24, 1621. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, S.; Wang, Y. A Long-Range 2.4G Network System and Scheduling Scheme for Aquatic Environmental Monitoring. Electronics 2019, 8, 909. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, C.; Sheng, L.; Cao, S. Optimization Schemes for UAV Data Collection with LoRa 2.4 GHz Technology in Remote Areas without Infrastructure. Drones 2022, 6, 173. [Google Scholar] [CrossRef]
- Kane, L.; Liu, V.; McKague, M.; Walker, G. An Experimental Field Comparison of Wi-Fi HaLow and LoRa for the Smart Grid. Sensors 2023, 23, 7409. [Google Scholar] [CrossRef]
- Janssen, T.; Bnilam, N.; Aernouts, M.; Berkvens, R.; Weyn, M. Lora 2.4 Ghz Communication Link and Range. Sensors 2020, 20, 4366. [Google Scholar] [CrossRef] [PubMed]
- Havriliuc, S.; Coca, E.; Lavric, A.; Popa, V.; Petrariu, A.I. Expanding IoT Connectivity by Using 2.4 GHz LoRa Technology. In Proceedings of the 2024 17th International Conference on Development and Application Systems, DAS, Suceava, Romania, 23–25 May 2024; Institute of Electrical and Electronics Engineers Inc.: New York City, NY, USA, 2024; pp. 87–90. [Google Scholar]
- Ragnoli, M.; Colaiuda, D.; Leoni, A.; Ferri, G.; Barile, G.; Rotilio, M.; Laurini, E.; De Berardinis, P.; Stornelli, V. A LoRaWAN Multi-Technological Architecture for Construction Site Monitoring. Sensors 2022, 22, 8685. [Google Scholar] [CrossRef]
- Guo, Q.; Yang, F.; Wei, J. Experimental Evaluation of the Packet Reception Performance of LoRa. Sensors 2021, 21, 1071. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Dimian, M.; Negru, M. The Utility of Dsrc and V2x in Road Safety Applications and Intelligent Parking: Similarities, Differences, and the Future of Vehicular Communication. Sensors 2021, 21, 7237. [Google Scholar] [CrossRef]
- Miao, L.; Virtusio, J.J.; Hua, K.L. Pc5-Based Cellular-V2x Evolution and Deployment. Sensors 2021, 21, 843. [Google Scholar] [CrossRef]
- Cui, G.; Zhang, W.; Xiao, Y.; Yao, L.; Fang, Z. Cooperative Perception Technology of Autonomous Driving in the Internet of Vehicles Environment: A Review. Sensors 2022, 22, 5535. [Google Scholar] [CrossRef] [PubMed]
- Zadobrischi, E.; Dimian, M. Inter-Urban Analysis of Pedestrian and Drivers through a Vehicular Network Based on Hybrid Communications Embedded in a Portable Car System and Advanced Image Processing Technologies. Remote Sens. 2021, 13, 1234. [Google Scholar] [CrossRef]
- Wiseman, Y. Autonomous Vehicles Will Spur Moving Budget from Railroads to Roads. Int. J. Intell. Unmanned Syst. 2024, 12, 19–31. [Google Scholar] [CrossRef]
- Colombi, D.; Joshi, P.; Xu, B.; Ghasemifard, F.; Narasaraju, V.; Törnevik, C. Analysis of the Actual Power and EMF Exposure from Base Stations in a Commercial 5G Network. Appl. Sci. 2020, 10, 5280. [Google Scholar] [CrossRef]
- Saari, M.; Muzaffar Bin Baharudin, A.; Sillberg, P.; Hyrynsalmi, S.; Yan, W. LoRa-A Survey of Recent Research Trends. In Proceedings of the 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 21–25 May 2018. [Google Scholar]
- Brahim, A.; Khedher, L.; Górriz, J.M.; Ramírez, J.; Toumi, H.; Lespessailles, E.; Jennane, R.; El Hassouni, M. A proposed computer-aided diagnosis system for Parkinson’s disease classification using 123I-FP-CIT imaging. In Proceedings of the 2017 International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Fez, Morocco, 22–24 May 2017; ISBN 9781538605516. [Google Scholar]
- Yun, Z.; Iskander, M.F. Ray Tracing for Radio Propagation Modeling: Principles and Applications. IEEE Access 2015, 3, 1089–1100. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).