Abstract
Earthquake disasters are usually very destructive and pose a great threat to human life and property. Based on the relatively mature technology of unmanned aerial vehicles (UAVs) and their high flexibility, these devices are widely used for information collection and processing in post-disaster relief operations. However, UAVs are limited by their battery capacity, which makes it hard for them to perform both large-scale information gathering and data processing at the same time. Nowadays, smartphones (SPs), which have become portable devices for people, have the characteristics of strong computing power, rich communication means and wide distribution. Therefore, in this study, we developed SPs to assist UAVs in computation incentive-based task execution. To balance the cost of UAVs and the execution utility of SPs during the task execution process, a multi-objective optimization problem was established, and the Multi-Objective Mutation-Immune Bat (MOMIB) algorithm was developed to optimize the proposed problem. Additionally, considering the diversity of tasks in real-world scenarios, Quality of Service (QoS) coefficients were introduced to ensure the performance requirements of different types of tasks. A large number of simulation experiments show that the task-offloading scheme that we propose is effective.
1. Introduction
The number of natural disasters has significantly increased in recent decades [1]. In addition to enhancing disaster prevention measures, improving post-disaster rescue operations is also extremely necessary. Since adequate and comprehensive data from the environment can help rescuers carry out accurate rescue operations, data collection and processing after the disaster are extremely important. The unmanned aerial vehicles (UAVs) can be equipped with different types of modules, such as the information acquisition module, the communication module, and the computing module. UAVs are widely used in post-disaster rescue because of their high data collection capability, high mobility, and strong adaptability to complex environments [2].
To ensure their flexibility and maneuverability during flight, UAVs are often limited in weight and size to achieve a lightweight and compact design, which, at the same time, limits the capabilities of the computing module, the communication module and the battery power module. Hence, the processing capability of a UAV is quite limited in the case of a massive amount of real-time data [3]. Nowadays, smartphones (SPs) are the most common devices that humans carry around on a daily basis. Due to the rapid development of today’s technology, the computing power of SPs has been greatly enhanced. Additionally, SPs support multiple communication modes, such as Bluetooth, Wireless Fidelity, Global System for Mobile Communications, and Code Division Multiple Access. Even in disaster scenarios, there are still a large number of available SPs that have a large number of idle computing resources.
Based on the characteristics of SPs, we chose to develop SPs as mobile assistance devices to help UAVs perform complex computational tasks in disaster scenarios. We first modeled the disaster based on the disaster level. Then, by considering the diversity of tasks in real-world scenarios, Quality of Service (QoS) coefficients were introduced to measure the performance requirements of different types of tasks. Finally, by considering both the cost of UAVs and the execution utility of SPs during the task execution process, we established a multi-objective optimization problem and designed a Multi-Objective Mutation-Immune Bat (MOMIB) algorithm to optimize our proposed problem.
The contributions of this study are as follows:
- Based on the wide distribution range and the enhanced computing capacity of SPs, we innovatively developed SPs as mobile assistance computing devices for UAVs task offloading in post-disaster rescue. The use of SPs not only enlarges the computing power of UAVs but also fully utilizes idle resources. As far as we know, this is the first study proposing a method in which smartphones are employed in post-disaster rescue.
- According to the characteristics of different types of tasks in the actual environment, we introduced QoS coefficients with the aim of measuring various tasks. Then, we differentiated among different task types based on these coefficients and modeled the earthquake disaster by dividing it into two scenarios based on different characteristics.
- To optimize the proposed problem, we designed a MOMIB algorithm which makes use of the characteristics of the immune algorithm to improve the traditional bat algorithm. Compared with the bat algorithm, the improved algorithm has better global solution and convergence.
- Extensive simulation experiments show that, compared with other relevant strategies, MOMIB achieves the best optimization results, i.e., the lowest UAV cost and the highest SP utility.
The organizational structure of this paper is introduced. The system model is introduced in Section 3. In Section 4, we report the calculations of the task computation cost of UAVs and the utility of SPs. In Section 5, we state our multi-objective optimization problem and provide details on the proposed MOMIB algorithm. The simulation experiment are conducted in Section 6. At last, we summarize this study in Section 7.
2. Related Works
Recently, scholars at home and abroad have performed extensive studies on UAV task offloading. For instance, in [4], the authors proposed the Multi-Hop Task Offloading and real-time computing scheme, which fully utilizes the computational power of UAVs, and built a powerful remote edge-computing network with multiple UAVs. The authors addressed the issue of joint resource allocation and deployment and established two algorithms to resolve the proposed problem. Guo et al. [5] designed the Smart and Trust Multi-UAV Task Offloading (STMTO) system, which utilized UAVs with a trusted style to offload tasks from Internet of Things (IoT) devices to edge servers. They further proposed a collaborative task collection scheme to minimize energy consumption and latency. By combining the Long Short-Term Memory (LSTM) task prediction algorithm with the UAV position optimization algorithm, Wu et al. [6] designed a three-layer computing offloading strategy-based energy efficiency optimization algorithm, which reduced the energy consumption of UAVs by dynamically programming and adjusting the UAV Multi-Acess Edge Computing (MEC) network. In [7], the authors proposed an innovative UAV-enabled MEC system to solve the service problem of IoT devices in poor-signal areas to minimize network service latency and UAV-weighted energy consumption.
In addition, the authors of [8] proposed an optimal partial offloading scheme named Partial Offloading Strategy Maximizing the User task number (POSMU). Through analyzing the 3D communication model, they concluded that this scheme could be applied to UAV-supported MEC systems without a seam. In study [9], the authors proposed an intelligent task-offloading algorithm (iTOA) for the UAV edge-computing network to reduce the processing computational load of the UAV computing platform; their method can adaptively choose the offloading action by sensing the network environment. Additionally, Yu et al. [10] developed an energy efficiency optimization algorithm for Block Coordinate Descent (BCD), which reduces the energy consumption of user terminals by making UAVs work together and executing the BCD algorithm when faced with blocked communication in a complex terrain. The authors of [11] conceptualized an energy-efficient computational offloading technique in the context of information security by considering the physical security layer; it also alleviates the computational pressure on UAVs when dealing with computational tasks with high offloading requirements.
Moreover, many studies have been dedicated to post-disaster relief [12,13,14,15]. In [12], the authors proposed a network architecture for UAVs and ground vehicles in which the UAV and the ground vehicle can communicate with each other through air-to-ground (A2G) communication. The UAVs in this system not only perform information acquisition but also act as relay stations when communication among ground vehicles is blocked. In [13], the authors explored a fog computing-based UAV system which allows for collaboration between UAVs and unmanned ground vehicles (UGVs) by designing and implementing a matching iterative algorithm. This scheme effectively improves the utilization of UAVs and reduces the average delay. Xu et al. [2] developed an example of a UAV system that can quickly obtain disaster site information; it can be used to acquire disaster images with different resolution parameters and was applied to the 7.0 magnitude earthquake in Lushan, Sichuan, China. In [14], the authors described a data acquisition framework based on the collaborative processing of UAVs and IoT. In [15], the authors investigated UAVs by utilizing their mobile communication and computing functions to assist local area networks in building a UAV-assisted, multiple-access edge-computing system when the communication infrastructure is not available. Unlike existing post-disaster relief efforts, we innovatively proposed utilizing SPs as assistance computing devices to aid UAVs in completing a large number of post-disaster rescue tasks.
3. System Model
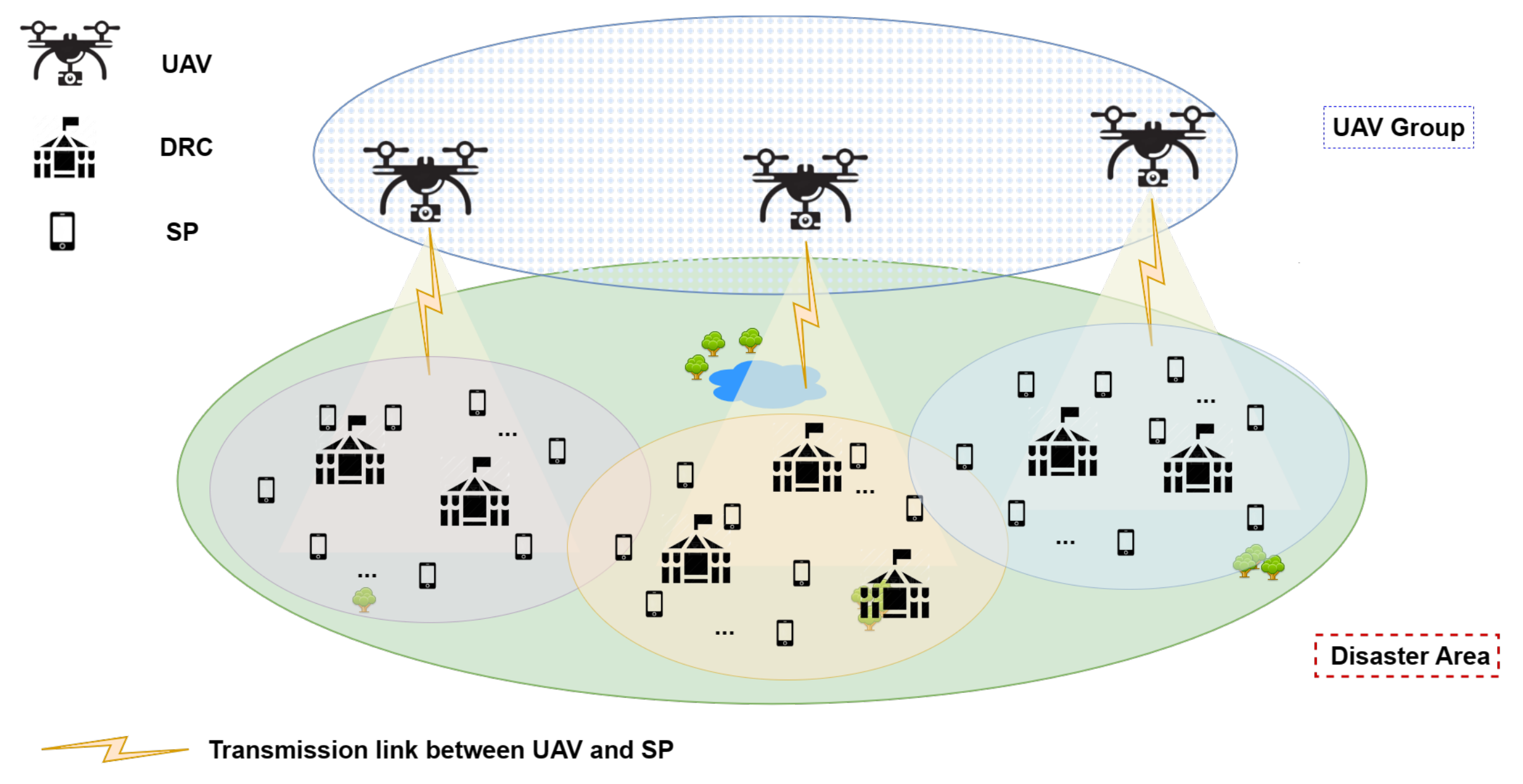
The system model is shown in Figure 1. There are three types of objects in the system: UAVs, SPs, and disaster relief centers (DRCs).
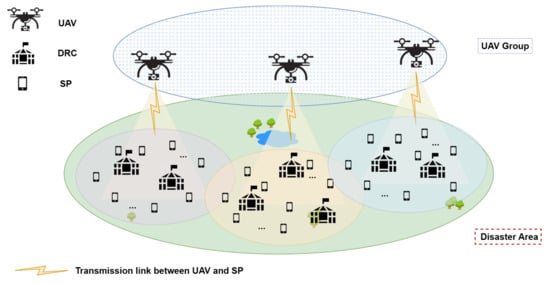
Figure 1.
System model.
Let us suppose that N UAVs are evenly distributed throughout the disaster area, and the set of UAVs is denoted by . Each UAV has a task queue waiting to be executed. The tasks in the task queue of UAV n are denoted by . Each UAV covers a designated area at a constant altitude, where h is the minimum safe cruising altitude that aims to minimize the energy consumption for maintaining altitude while ensuring safety [16,17]. We assume there is no interaction between UAVs, and the coverage areas of each UAV do not overlap. In Figure 1, each UAV is responsible for collecting tasks within its coverage area and offloading some tasks to the SPs within the coverage range of the UAV. The coverage range of the UAV is set as .
After the disaster, several DRCs need to be deployed in the disaster area. These DRCs can provide different types of assistance to nearby residents, such as accommodation and disaster relief supplies, depending on the severity of the disaster. There are a certain number of SPs within each DRC which are carried by the people located within the DRC.
As the most common portable smart devices in daily life, smartphones have computing, storage and communication capabilities. Most of the time, most of the computing resources of a smartphone are idle. Therefore, smartphones are ideal equipment to assist UAVs in completing computation-intensive tasks in disaster rescue. For UAV n, let us suppose that there exist D DRCs in its coverage area, each with a certain number of SPs. The SPs set in the coverage range of UAV n is given as .
To prompt SPs to assist the UAVs in performing the offloading, the system can provide incentives for the owner of the SP that executes the offloading of tasks. Based on the operating experience of the peer to peer (P2P) file system [18], about 30% of users are willing to offer assistance for the common interests of the community. These users are enough to support the computing operation of the system. Moreover, a certain number of users are willing to share resources without obtaining benefits.
For relatively selfish users, the system can motivate users to perform tasks through incentives, such as distributing shopping vouchers, monetary rewards or phone bill coupons.
3.1. Model of the Disaster Relief Center
Since different disaster magnitudes cause different degrees of damage to surface buildings, in this study, we took the earthquake disaster as an example and established two different levels, namely, the mild disaster and the severe disaster scenarios.
Mild disaster: If the magnitude of the earthquake is , the earthquake naturally causes damage to some infrastructure. However, the damage to buildings may be relatively light, and people can still live in their homes. In this situation, DRCs only need to distribute survival supplies to people in the disaster area, which means that people can dynamically enter and exit the DRCs.
Let the probability of people entering DRCs follow the Poisson process with the average arrival rate of [11,19]. Let us suppose that each DRC has only one service window and that the service speed is . Then, the process of people arriving at a DRC follows the M/M/1 queuing model.
According to this model, the average waiting time for people in a DRC is
where is the average waiting time for people in a DRC, and and denote the average queuing time and the average service time, respectively.
The remaining waiting time () of SP m at a DRC is
where is the time that SP m has already spent at the DRC.
Severe disaster: When the earthquake’s magnitude is , the earthquake causes serious damage to the city. In this circumstance, the DRCs not only need to distribute necessary survival supplies to people nearby but also provide residential accommodation for them. In this case, it is considered that the SPs are located within the DRCs, and their positions are relatively fixed.
The remaining waiting time of SP m at the DRC is then given as
After obtaining the remaining waiting time of the SPs at a DRC, we select the SP whose remaining waiting time is greater than the tolerance delay of at least one task in the queue of tasks that are candidates for task execution, where the task maximum tolerance delay is the maximum execution delay required for executing the task.
3.2. Task Model
The QoS requirement is an important metric for actual tasks. In actual scenarios, different types of tasks have different QoS requirements. Previous researchers have also stated that real-time tasks, video tasks, audio tasks, and image tasks have various QoS requirements [20,21]. Table 1 lists the QoS requirements for different task types.

Table 1.
Typical QoS requirements of various applications.
The data transmission rate and data delivery latency are the most commonly used parameters to describe the QoS demands of tasks [22]. Since transmission energy consumption is directly proportional to the transmission rate [20], the transmission energy consumption and data transmission delay are chosen to determine the QoS demands of the tasks. As shown in Table 2, the QoS levels of the two metrics are set from to according to their corresponding values described in Table 1, which indicate the QoS preference level is from strong to weak. For example, since the image data in Table 1 have the lowest latency requirement among all data types, the QoS latency level of the image task is set to .
Table 2.
QoS preference levels for different task types.
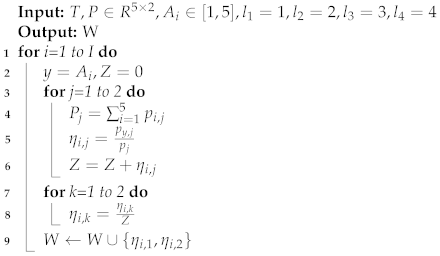
Further, the QoS vector of a task is proposed. For instance, the QoS vector of task is set as , where and denote the weight of energy consumption and the weight of data delivery delay, respectively. The calculation method for and is described in Algorithm 1.
In Algorithm 1, represents the QoS level matrix, which is mapped from the matrix in Table 2. denotes the type of task. First, the information of the task queue (T) is input, and the matrix correlation variables are initialized (lines 1–2). Then, the two weight coefficients corresponding to different variables are calculated separately (lines 3–6). Afterwards, we normalize the two weights again to obtain the final weight coefficients (lines 7–8). Finally, the resulting set of QoS weighting coefficient values are added to the list of weighting coefficients () (line 9).
Each UAV-generated task can be described by a vector. For instance, task is explained as vector , where represents the data size; is the maximum latency requirement of the task; and represents the QoS requirements of the task, which are calculated with Algorithm 1.
Moreover, the SPs are given incentives for executing the tasks. For task , the base incentive () is given as
where is a constant.
The reward penalty () is described as
where is the total delay for completing the task, which can be calculated as shown in Section 4.
Hence, the incentive for SP m to perform task can be given as
| Algorithm 1: Obtain QoS weight coefficients |
 |
4. Task Computation Model
4.1. Energy Consumption and Transmission Delay Calculation
Let us suppose that the position of UAV n is , where . The position of SP m located in the DRC is denoted by , where .
According to the 3GPP technical report [23], the path loss from UAV n to SP m is given by
where denotes the received power at reference distance .
The data transfer rate between UAV n and SP m is
where is the channel bandwidth between UAV n and SP m, is the power spectral density of Gaussian Noise, and denotes the transmitted power between UAV n and SP m.
Given , the transmission delay between UAV n and SP m for delivery task is expressed as
UAV n performs a certain degree of data pre-processing before transmitting data to SP m. The local data pre-processing delay of task at UAV n are
where is the CPU computational resource allocated by UAV n for task pre-processing, C is the number of CPU cycles required to process 1 bit of data, and I is the number of tasks in the task queue.
Furthermore, based on the research study [20], the energy consumption for transmission from UAV n to SP m is given by
The local data pre-processing energy consumption at UAV n is
where represents the power coefficients of UAV n.
Similarly, the computing energy consumption of SP m for executing task is
where represents the power coefficients of SP m.
In addition, SPs also generate energy consumption for receiving data, which is given by
where is the data receiving power of SP m.
4.2. Cost of UAVs
Based on the description in the previous subsection, the total latency and the energy consumption of UAV n for offloading task can be expressed as
By considering the latency, the energy consumption of a UAV for offloading task , and the QoS requirements of the task, the cost of UAV n for offloading task can be expressed as
where and represent the weights of task on the energy consumption and transmission delay, respectively, as presented in Algorithm 1.
Hence, for UAV n, the total overhead of offloading the tasks in the task queue is
4.3. Smartphone’s Utility Model
Based on the description in Section 4.1, the total energy consumption of SP m for executing task can be expressed as
By considering both the execution costs and the incentives for the SPs for executing the tasks, the utility function of SP m for executing task is
The total utility value of the SPs for executing all the offloading tasks from UAV n is
5. Problem Statement and Solution
5.1. Problem Statement
Most works [24,25] have only considered the performance of the task publisher when designing task scheduling, which makes it difficult for these methods to guarantee the profit of the task executors. In contrast, some studies [26,27] have focused on maximizing the benefit of the task executors when assigning offloading tasks, which may lead to a low task completion rate and a long task execution delay.
Our goal is to minimize the overhead of UAVs while maximizing the execution utility of SPs. Moreover, QoS requirements for different types of tasks in real-world environments are considered in the modeling of the overhead of the UAVs.
Our multi-objective optimization problem is given by
In problem P, constraint denotes the power restriction of the SPs. To ensure the normal use by the user, if the remaining battery of the SP is less than , it will not be used for task execution. Constraints and indicate that SPs with remaining residence time lower than the minimum latency requirement of the offloading tasks cannot be used for task execution. s is a set of solutions for all task assignments in the task queue (T). Constraints and limit the number of tasks executed by each SP; that is, the execution relationship between an SP and a task is set as a one-to-one relationship to ensure execution efficiency.
5.2. Task-Offloading Optimization
In Section 5.1, we proposed a multi-objective optimization problem. Multi-objective optimization refers to optimizing multiple sub-objectives at the same time, and these sub-objectives may conflict with each other. The optimization of one objective may lead to the deterioration of another objective. Usually, there is no optimal solution that can optimize all objectives at the same time.
Pareto optimality is a good method for solving multi-objective optimization problems. It is often used to achieve a good trade-off between multiple objectives. It can find a balanced solution in multi-objective optimization that cannot be improved. That is, it finds a solution that improves one objective and other objectives are not inferior to other solutions.
Therefore, based on the idea of Pareto optimality and the Multi-Objective Evolutionary Algorithm framework [28,29,30], we propose our multi-objective mutation immune bat (MOMIB) algorithm. It combines the bat algorithm (BA) [19] with the clone immune algorithm [24].
As the classical multi-objective optimization algorithm, the BA has fast convergence speed and good performance. However, it easily falls into local optimal solutions during the optimization process due to the lack of sufficient mutation mechanisms that continuously enrich the population. Therefore, we introduce the immune algorithm with mutation ability into the BA and design a group adjustment evaluation algorithm based on the characteristics of the problem, finally obtaining the MOMIB algorithm. This algorithm can obtain a wider solution optimization domain while ensuring fast convergence, thereby obtaining better performance and more targeted optimization capabilities for the problem at hand.
The BA part of our algorithm is introduced first. Each bat is represented as a feasible solution. In the t-th generation of the optimization process, the i-th bat can be denoted as a vector , where represents the position coordinates of the i-th bat of the t-th generation; represents the velocity direction of the i-th bat of the t-th generation; and , and are the frequency, loudness, and pulse emission frequency that need to be used during the bat’s movement.
At the beginning of the iteration, the frequency () is first generated as
where is a random number in the range (0, 1), and and denote the preset upper and lower frequency limits, respectively.
The velocity is updated as
where represents the optimal position in the history of the previous t-generation group.
Then, we choose to perform global update (25) or local update (26), based on random number distributed in (0, 1). When , the i-th bat performs a global search; otherwise, a local search is performed:
where is a random number uniformly distributed in (−1, 1), and is the average loudness of the t-th-generation bat.
During the process of position updating, we generate random number , which is uniformly distributed in (0, 1). If, and only if, both and are satisfied at the same time, the position of the i-th bat is updated to . Otherwise, the position of the i-th bat remains :
Finally, the pulse emission frequency and loudness are updated as
where and are both preset parameters greater than 0, and and are the initial values of pulse emission frequency and loudness, respectively. In this system, , and is a random number belonging to [0,1].
The next part of our algorithm is the immune algorithm. Population , obtained with the BA part, is input into the immune algorithm part. Each bat in the population is regarded as an antibody in the immune cloning process, which is detailed below.
Step 1: Randomly select k (k < n) antibodies, set them as sub-population , and then clone and replicate the sub-population to obtain a new population () with the following cloning rules:
where and is the clone multiplicity of , proportional to the fitness of .
Step 2: Perform high-frequency mutation for each individual in population ; the mutation operator can adapt with evolution, concerning both the number of iterations and individual fitness. For any individual in , perform the following mutation:
in Equation (31) is
where b is a positive constant and . In early iterations, is small, making , indicating a high probability of mutation; in later iterations, the population characteristics gradually approach the ideal state in evolution, and , allowing for local search in a small space.
Further expand as
where and is used for regulating the range of the search domain and typically takes values in [2,5,31]. R in the above equation is denoted by
where represents the fitness of antibody and is the maximum fitness value, which is the aggregation density of the individual.
Step 3: Select the best individual from the cloned mutated individuals as the next generation.
The third part is our population adjustment evaluation algorithm, which we designed in order to adjust the initial population for each iteration. This algorithm ensures the consistency of the initial data size of each iteration and the optimization effect in each iteration.
Firstly, the obtained solution set is screened according to the constraints in problem P(22), and the solutions that do not meet the constraints are screened out. Due to the significant difference in data distribution between the two optimization indexes, we make unified adjustments to their distribution ranges based on their data distribution so that the importance weights of the two indexes are consistent in the final ranking. Then, we use the adjusted weighted sum result as the ranking indicator.
After the iteration in the evolutionary algorithm part, the ranking metrics for each solution in the resulting solution set are calculated and used to rank the solutions. Finally, the solution set is trimmed according to the group size required by the iteration, and the current best-optimized solutions are kept for the next iteration.
Based on the above introduction of the various components of MOMIB, the final algorithm is represented in Algorithm 2.
| Algorithm 2: Multi-Objective Mutation-Immune Bat (MOMIB) algorithm |
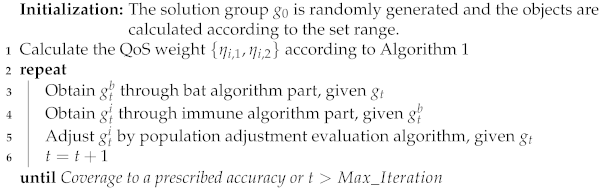 |
5.3. Delay Analysis
In our system, UAV acts as the central controller to execute the proposed optimization problem. To collect the context information of SPs within the UAV’s coverage range, each SP periodically sends the information required for the execution of algorithms to the UAV.
Since the transmission delay between the UAV and the SP is critical for the successful of the uploaded tasks, we give a detailed discussion of the transmission delay as follows: (1) Firstly, the communication delay between the UAV and the ground equipment depends on the size of the transmitted data, the communication power of the ground equipment and the communication method used between them. As described in studies [13,32], in the ground-to-air (G2A) communication mode, if the flight height of the UAV is not very high and the amount of data to be transmitted is not large, the communication delay from the ground equipment to the UAV is very small. (2) Secondly, there are many protocols that support air-to-ground (A2G) and G2A transmission, which enable direct communication between the UAV and the ground equipment, even under the disaster environment. For example, OcuSync technology is widely used in DJI UAVs. OcuSync protocol not only supports long-distance data transmission but also has the advantages of low latency and high data fidelity. The data transfer latency of OcuSync3.0 (O3) is only 28 ms when transmitting 810p resolution and 120 fps images. Using the latest OcuSync 4.0 protocol, the delivery delay can be further reduced. Near Link is a new generation of wireless connection technology proposed by China, which supports different communication distances. Its maximum communication distance can reach 100 m. The transmission speed of Near Link can reach the level of bits per second, and the transmission delay can reach the level of microseconds. In the method proposed in this paper, the communication protocol between the UAV and the smartphone can choose OcuSync, Near Link, or other self-developed protocols, which are sufficient to support our task offloading requirements. Further, the notification message of the SP is small, only containing information such as the ID number of the SP, its power coefficients, its remaining energy, and so on. In all, our task offloading can be carried out normally even in the disaster case. (3) To further reduce transmission delays, we can also adopt the method of semantic communication. In semantic communication [33,34], data can be transmitted with smaller bandwidth and lower latency compared with the Orthogonal Multiple-access manner. Semantic communication is task oriented. It first understands and then transmits the task to be transmitted. Extracting features, compressing, and transmitting the task ultimately achieves more efficient information delivery.
6. Simulation Results
In this section, we evaluate the performance of the proposed algorithm through simulation experiments. The Python environment was utilized to build the system framework. The main simulation parameters are shown in Table 3 [15,20,24,25,35].
Table 3.
Simulation parameters.
The communication coverage range of the UAV was set to 30 m [20]. SPs were then distributed within the UAV coverage area by using different distribution methods based on different disaster scenarios.
For the disaster scenarios, we conducted experiments for both mild disaster and severe disaster scenarios. In the case of mild disaster, one UAV was set to cover two–three DRCs, the arrival rate of the SPs ranged from 0.02 to 0.09 people/s, and the speed of the distribution of survival supplies ranged from 0.05 to 0.1 people/s.
The baseline approaches for comparison are given as follows.
Stochastic Task Scheduling Algorithm (STS): The algorithm randomly matches tasks with SPs to execute tasks.
Emergency Task Priority Scheduling Algorithm (ETP): The algorithm prioritizes the assignment of tasks with high urgency to the nearest SPs for execution, in which tasks with smaller maximum tolerated delay have higher urgency.
Original bat algorithm (OB): The algorithm is the unimproved original bat algorithm.
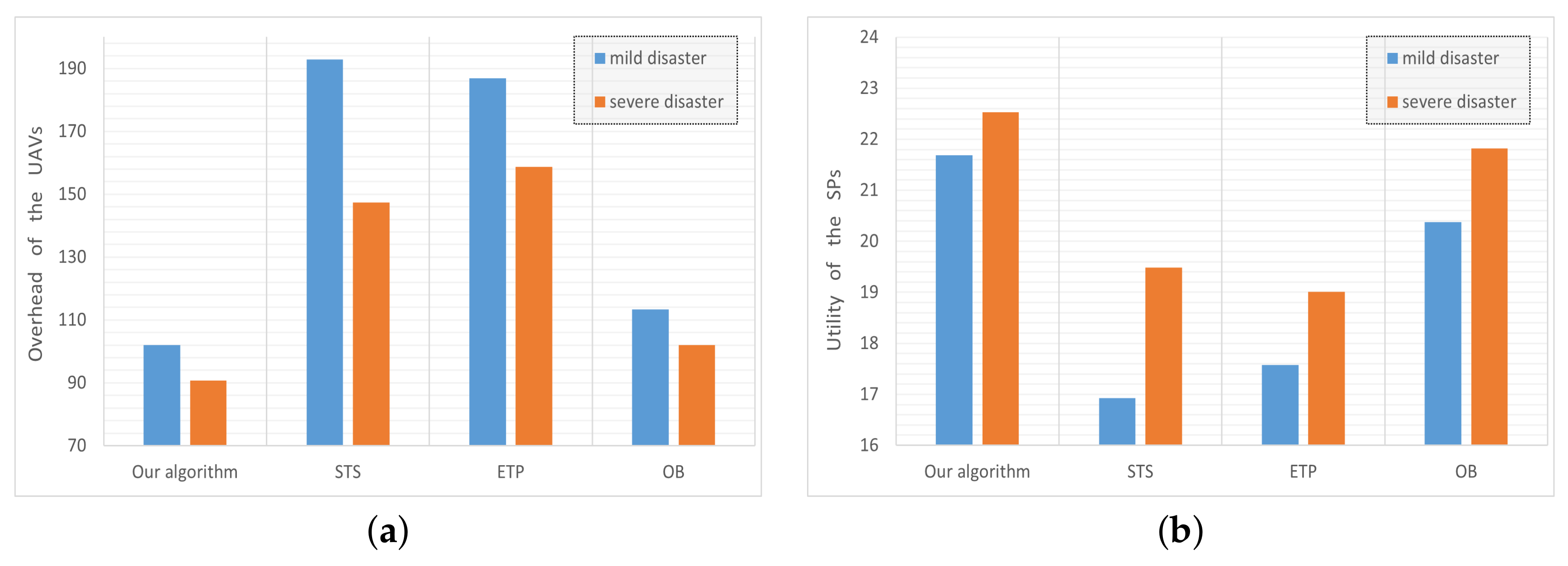
Figure 2 shows the final optimization results of different algorithms. The comparison in the figure shows that our algorithm is far superior to STS. In addition, compared with the ETP algorithm that uses a relatively monotonic optimization indicator, our algorithm also achieves better performance. Finally, our indicators are also higher than the traditional OB algorithm, which shows the effectiveness of our algorithm innovation and further improves the performance of the algorithm. In summary, it reflects the effectiveness of our algorithm and its good optimization ability on multi-objective problems.
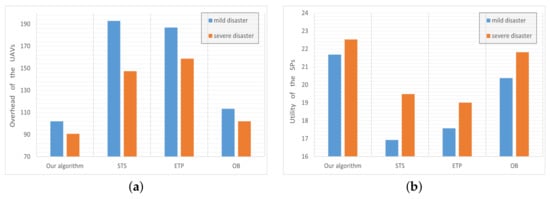
Figure 2.
Performance comparison between different baseline approaches and MOMIB. (a) System overhead of UAVs. (b) Execution utility of SPs.
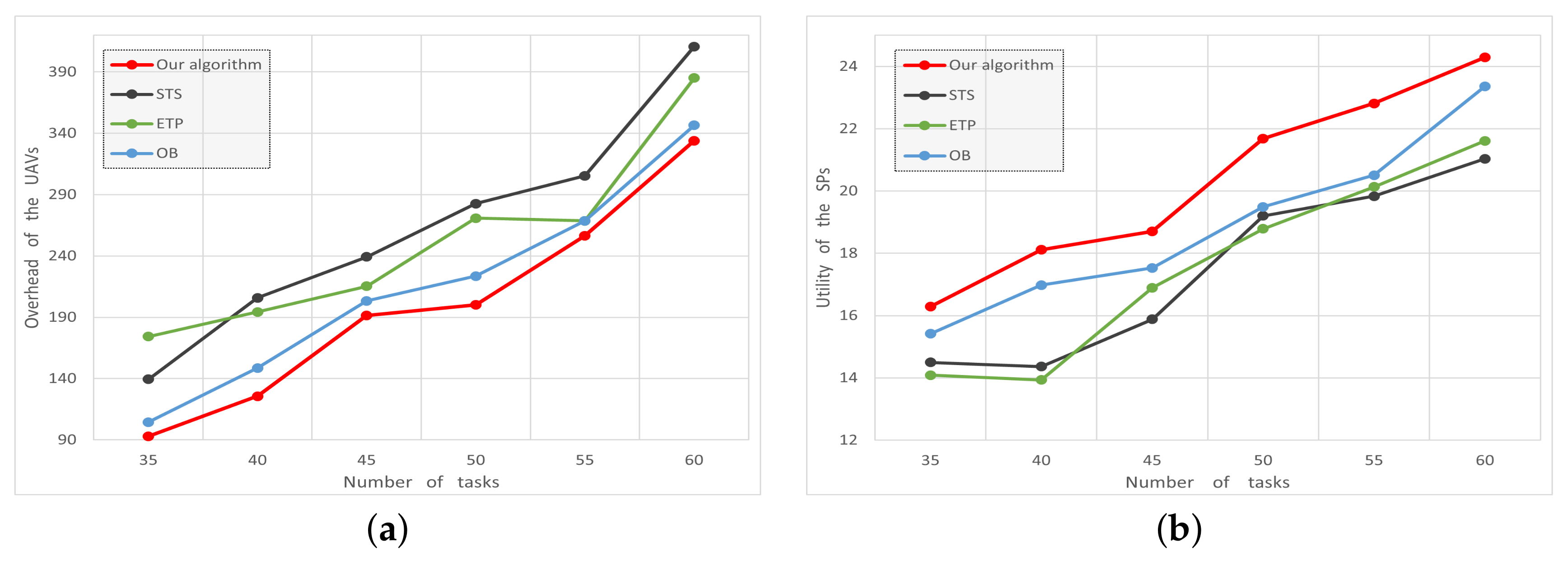
Further, we validated the robustness of the algorithm through two sets of control-variable experiments. Firstly, we changed the number of tasks while keeping the number of SPs constant, setting the number of SPs to 70 and the number of tasks gradually increasing from 35 to 60. Figure 3 demonstrates the optimization of our algorithm for the two objectives in mild disaster and the comparison with other algorithms. It can be seen that the overall overhead of the UAV system inevitably increases with the increase in system load, but the utility of users also increases relatively. Our algorithm can always optimize multiple objectives and achieve the best optimization results.
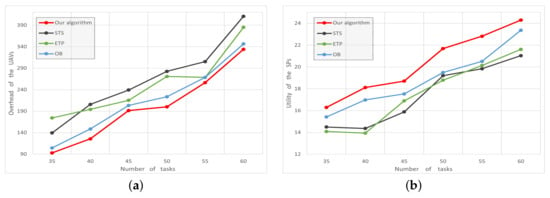
Figure 3.
Variation in system performance with number of tasks in mild disaster scenario. (a) Variation in total UAV overhead with number of tasks. (b) Variation in total utility of SPs with number of tasks.
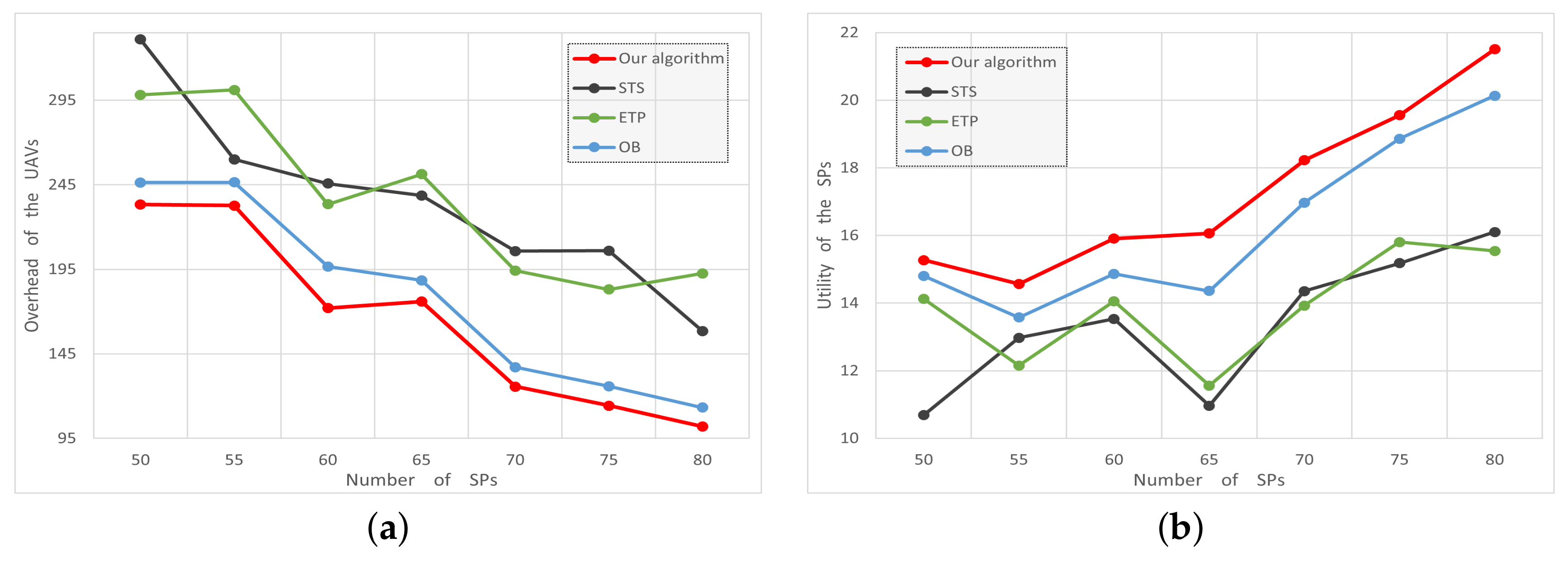
We also conducted experiments to control the number of SPs. We set the number of tasks to 40 and increased the number of SPs from 50 to 80. In Figure 4, the performance of our algorithm in mild disaster scenarios is compared with that of other algorithms. It can be seen that with abundant computational resources, the computational power of our system is substantially improved and still outperforms other algorithms. However, as the computational resources continue to increase, the optimization effect is gradually saturated.
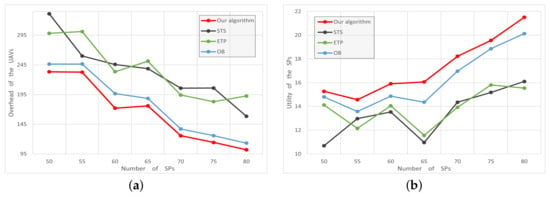
Figure 4.
Variation in system performance with number of SPs in mild disaster scenario. (a) Variation in total UAV overhead with number of SPs. (b) Variation in total SPs utility with number of SPs.
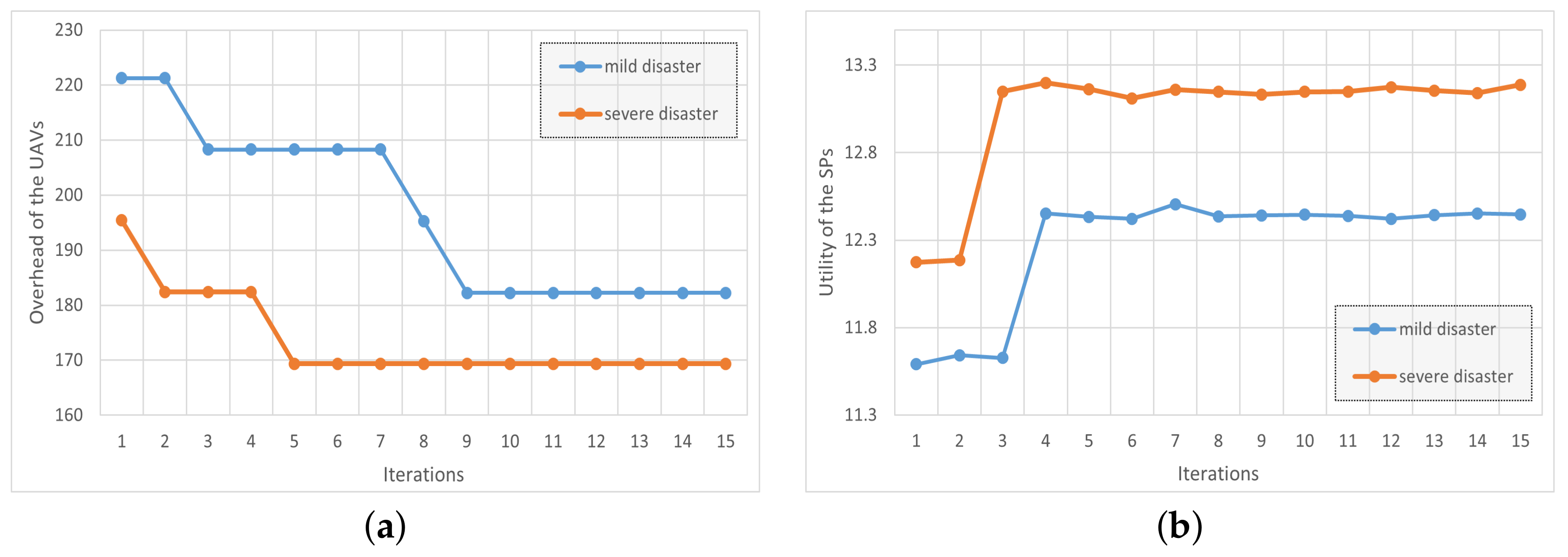
As shown in Figure 5, we conducted experiments on the performance of the algorithm as iterative convergence in two environments. It can be seen that at the beginning of the iteration, the two objects obtained by the initial allocation of the system have not yet achieved the best optimization effect. As the algorithm iterates, the two objectives are continuously optimized. By continuously optimizing the task allocation scheme, the overhead of UAVs is reduced and the utility of SPs is gradually increased. And convergence is achieved in fewer cycles. This reflects the effectiveness of our algorithm and its ability to converge quickly.
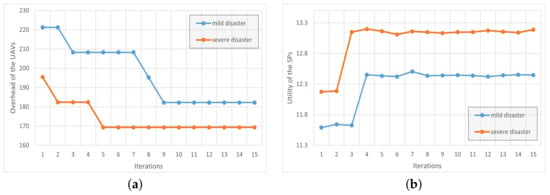
Figure 5.
Variation in each objective with MOMIB iterations. (a) System overhead of UAVs. (b) Execution utility of SPs.
To validate the performance of MOMIB in various data environments, we conducted tests under different conditions. Specifically, the performance of MOMIB was evaluated in a random environment (RE) and a true environment (TE).
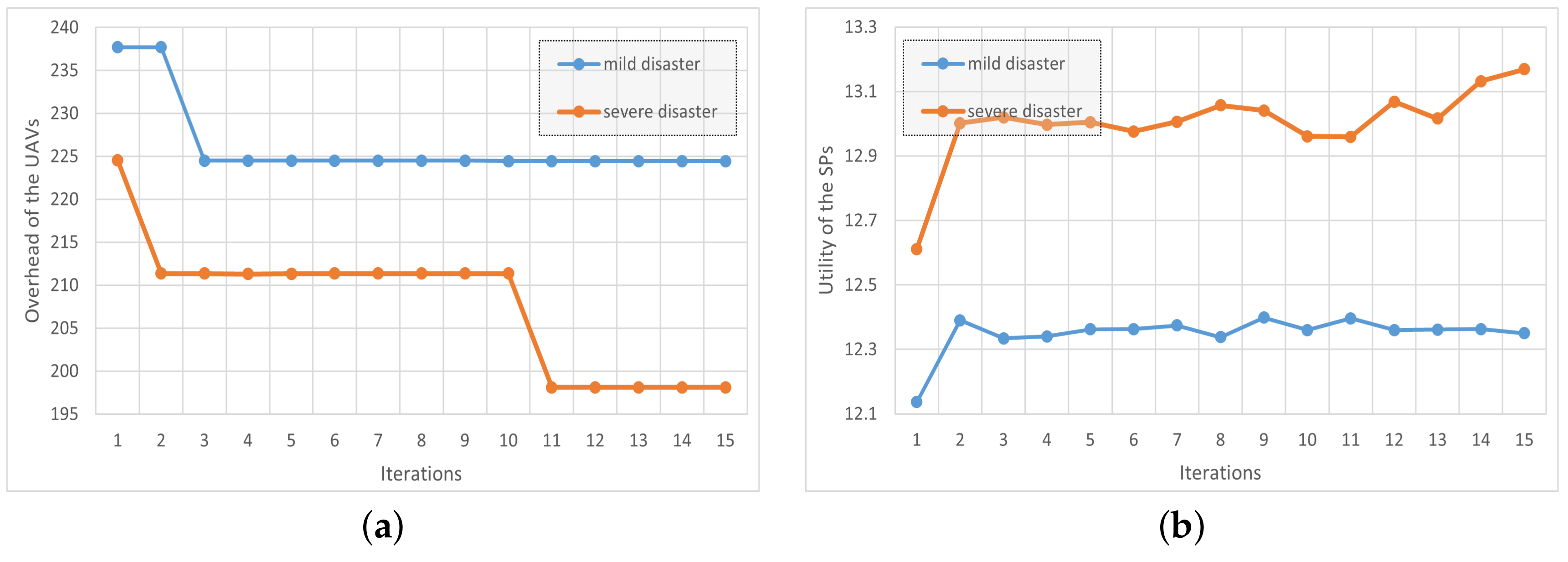
The RE entailed the random allocation of task types and was the environment used in all the above experiments. Since sufficient experimentation was conducted and validated, we do not repeat it here. The TE simulated the data distribution of real IoT scenarios, in which the various types of applications were roughly distributed in proportions of 35%, 15%, 20%, 20% and 10%, according to the order in Table 1 [20,21]. Figure 6 shows the performance of MOMIB with iterations in different environments. It can be observed that MOMIB achieved optimization and convergence in different environments, which further validates the stability of the proposed algorithm.
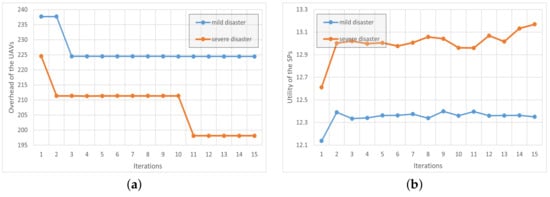
Figure 6.
Performance of MOMIB in TE. (a) Variation in system overhead of UAVs in TE. (b) Variation in execution utility of SPs in TE.
7. Conclusions
In the case of disaster, infrastructure and communication methods can be heavily damaged. To adapt to the complex disaster area, we have developed UAVs as an auxiliary means of rescue. Faced with the complex and variable conditions on the ground, UAVs will generate many tasks during the search process. However, due to the lightweight design of UAVs, their battery capacity and computational capabilities are significantly limited. Therefore, we innovatively propose the use of widely distributed smartphones with abundant computational resources as mobile auxiliary devices to assist UAVs in task offloading. On this basis, we have introduced the QoS coefficient to meet the service level requirements of different tasks as much as possible.
Based on this system architecture, we have innovatively designed a multi-objective optimization problem that considers both the task distribution from the UAVs and the task execution on the smartphones. By implementing the MOMIB algorithm, we have optimized two indicators: the system overhead of the UAVs and the utility of the smartphones. And our algorithm has been proven to effectively handle and optimize multi-objective tasks through extensive simulation experiments, demonstrating its effectiveness.
However, the current system has been designed and optimized only for scenarios involving a single UAV in a local area network environment. In the future, we plan to expand the scope of our research to explore task collaboration and interaction in a multi-UAV environment.
Author Contributions
L.L.: Writing—original draft, and review and editing, validation, figures, data analysis; Z.W.: Software, data analysis; J.Z.: Study design, writing—review and editing, supervision; S.M.: Literature search, data collection. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Municipal Government of Quzhou (Grant 2023D007, Grant 2023D015, Grant 2023D033, Grant 2023D034, Grant 2023D035) and and Guiding project of Quzhou Science and Technology Bureau (2023K013, 2023K016).
Data Availability Statement
The authors confirm that the data supporting the findings of this study are available within the article.
Acknowledgments
I am particularly indebted to my mentor, Jinqi Zhu, whose guidance and tireless dedication have been fundamental to this work. Zhu’s insightful advice, rigorous academic standards, and unwavering support have not only shaped the direction of this research but have also been a source of inspiration throughout the journey. I am thankful to Zhenchuan Wang, who has been a constant source of support throughout this journey. Wang ’s companionship and the shared ideas and inspiration have been greatly appreciated and have contributed positively to the development of our work. To Shizhao Ma, I extend my thanks for their respective roles in literature search, and data collection. His collaborative efforts were integral to the successful execution of our study. I also wish to acknowledge the administrative and technical staff for their logistical support and the resolution of various challenges we encountered. Their behind-the-scenes contributions were indispensable to our progress. As we look forward to future endeavors, I anticipate the opportunity to continue collaborations and to acknowledge further contributions to our work.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Pu, C.; Zhou, X.; Rescue, M. Smartphone-Based Self Rescue System for Disaster Rescue. In Proceedings of the 2019 IEEE 9th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 7–9 January 2019. [Google Scholar]
- Xu, Z.; Yang, J.; Peng, C.; Wu, Y.; Jiang, X.; Li, R.; Zheng, Y.; Gao, Y.; Liu, S.; Tian, B. Development of an UAS for post-earthquake disaster surveying and its application in Ms7.0 Lushan Earthquake, Sichuan, China. Comput. Geosci. 2014, 68, 22–30. [Google Scholar] [CrossRef]
- Chen, Q.; Zhu, H.; Yang, L.; Chen, X.; Pollin, S.; Vinogradov, E. Edge computing assisted autonomous flight for uav: 618 Synergies between vision and communications. IEEE Commun. Mag. 2021, 59, 28–33. [Google Scholar] [CrossRef]
- He, X.; Jin, R.; Dai, H. Multi-Hop Task Offloading WITH On-the-Fly Computation for Multi-UAV Remote Edge Computing. IEEE Trans. Commun. 2022, 70, 1332–1344. [Google Scholar] [CrossRef]
- Guo, J.; Huang, G.; Li, Q.; Xiong, N.N.; Zhang, S.; Wang, T. STMTO: A Smart and Trust Multi-UAV Task Offloading System. Inf. Sci. 2021, 573, 519–540. [Google Scholar] [CrossRef]
- Wu, G.; Miao, Y.; Zhang, Y.; Barnawi, A. Energy efficient for UAV-enabled mobile edge computing networks: Intelligent task prediction and offloading. Comput. Commun. 2020, 150, 556–562. [Google Scholar] [CrossRef]
- Yu, Z.; Gong, Y.; Gong, S.; Guo, Y. Joint Task Offloading and Resource Allocation in UAV-Enabled Mobile Edge Computing. IEEE Internet Things J. 2020, 7, 3147–3159. [Google Scholar] [CrossRef]
- Tang, Q.; Chang, L.; Yang, K.; Wang, K.; Wang, J.; Sharma, P.K. Task number maximization offloading strategy seamlessly adapted to UAV scenario. Comput. Commun. 2020, 151, 19–30. [Google Scholar] [CrossRef]
- Chen, S.; Wang, Q.; Chen, J.; Wu, T. An Intelligent Task Offloading Algorithm (iTOA) for UAV Network. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019. [Google Scholar]
- Yu, X.Y.; Niu, W.J.; Zhu, Y.; Zhu, H.B. UAV-assisted cooperative offloading energy efficiency system for mobile edge computing. Digit. Commun. Netw. 2022, 10, 16–24. [Google Scholar] [CrossRef]
- Bai, T.; Wang, J.; Ren, Y.; Hanzo, L. Energy-Efficient Computation Offloading for Secure UAV-Edge-Computing Systems. IEEE Trans. Veh. Technol. 2019, 68, 6074–6087. [Google Scholar] [CrossRef]
- Zhou, Y.; Cheng, N.; Lu, N.; Shen, X.S. Multi-UAV-Aided Networks: Aerial-Ground Cooperative Vehicular Networking Architecture. IEEE Veh. Technol. Mag. 2015, 10, 36–44. [Google Scholar] [CrossRef]
- Chen, W.; Su, Z.; Xu, Q.; Luan, T.H.; Li, R. VFC-Based Cooperative UAV Computation Task Offloading for Post-disaster Rescue. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020. [Google Scholar]
- Kumar, J.S.; Kumar, S.; Choksi, M.; Zaveri, M.A. Collaborative data acquisition and processing for post disaster management and surveillance related tasks using UAV-based IoT cloud. Int. J. Hoc Ubiquitous Comput. 2020, 34, 216. [Google Scholar] [CrossRef]
- Zhang, K.; Gui, X.; Ren, D.; Li, D. Energy–Latency Tradeoff for Computation Offloading in UAV-Assisted Multiaccess Edge Computing System. IEEE Internet Things J. 2021, 8, 6709–6719. [Google Scholar] [CrossRef]
- Li, M.; Cheng, N.; Gao, J.; Wang, Y.; Zhao, L.; Shen, X. Energy Efficient UAV-Assisted Mobile Edge Computing: Resource Allocation and Trajectory Optimization. IEEE Trans. Veh. Technol. 2020, 69, 3424–3438. [Google Scholar] [CrossRef]
- Jeong, J.S.; Simeone, O.; Kang, J. Mobile Edge Computing via a UAV-Mounted Cloudlet: Optimization of Bit Allocation and Path Planning. IEEE Trans. Veh. Technol. 2018, 67, 2049–2063. [Google Scholar] [CrossRef]
- Liu, N.; Liu, M.; Chen, G.; Cao, J. The sharing at roadside: Vehicular content distribution using parked vehicles. In Proceedings of the 2012 Proceedings IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012. [Google Scholar]
- Yang, X.-S. A new metaheuristic bat-inspired algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); Springer: Berlin/Heidelberg, Germany, 2010; Volume 284, pp. 65–74. [Google Scholar]
- Huang, X.; Yang, X.; Chen, Q.; Zhang, J. Task Offloading Optimization for UAV-assisted Fog-enabled Internet of Things Networks. IEEE Internet Things J. 2021, 9, 1082–1094. [Google Scholar] [CrossRef]
- Chalmers, D.; Sloman, M. A survey of quality of service in mobile computing environments. IEEE Commun. Surv. 1999, 2, 2–10. [Google Scholar] [CrossRef]
- Yang, M.; Liu, N.; Feng, Y.; Gong, H.; Wang, X.; Liu, M. Dynamic Mobile Sink Path Planning for Unsynchronized Data Collection in Heterogeneous Wireless Sensor Networks. IEEE Sens. J. 2023, 23, 20310–20320. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, C.X.; Hua, B.; Mao, K.; Jiang, S.; Yao, M. 3GPP TR 38.901 channel model. In The Wiley 5G Ref: The Essential 5G Reference Online; Wiley Press: Hoboken, NJ, USA, 2021; pp. 1–35. [Google Scholar]
- Liu, Y.; Zhu, J.Q.; Wang, J. Computation Offloading Optimization in Mobile Edge Computing Based on HIBSA. Mob. Inf. Syst. 2021, 2021, 7716654. [Google Scholar] [CrossRef]
- Zhu, J.; Zhao, H.; Wei, Y.; Ma, C.; Lv, Q. Unmanned Aerial Vehicle Computation Task Scheduling Based on Parking Resources in Post-Disaster Rescue. Appl. Sci. 2023, 13, 289. [Google Scholar] [CrossRef]
- Liu, D.; Khoukhi, L.; Hafid, A. Decentralized data offloading for mobile cloud computing based on game theory. In Proceedings of the 2017 Second International Conference on Fog and Mobile Edge Computing (FMEC), Valencia, Spain, 8–11 May 2017; pp. 20–24. [Google Scholar]
- Chen, X.; Jiao, L.; Li, W.; Fu, X. Efficient multi-user computation offloading for mobile-edge cloud computing. IEEE/ACM Trans. Netw. 2016, 5, 2795–2808. [Google Scholar] [CrossRef]
- Liang, Z.; Song, R.; Lin, Q.; Du, Z.; Chen, J.; Ming, Z.; Yu, J. A double-module immune algorithm for multi-objective optimization problems. Appl. Soft Comput. 2015, 35, 161–174. [Google Scholar] [CrossRef]
- Lin, Q.; Chen, J. A novel micro-population immune multiobjective optimization algorithm. Comput. Oper. Res. 2013, 40, 1590–1601. [Google Scholar] [CrossRef]
- Gao, J.; Wang, J. A hybrid quantum-inspired immune algorithm for multiobjective optimization. Appl. Math. Comput. 2011, 217, 4754–4770. [Google Scholar] [CrossRef]
- Shang, R.H.; Jiao, L.C.; Ma, W.P. Immune clonal multiobjective optimization algorithm for constrained optimization. J. Softw. 2008, 19, 2943–2956. [Google Scholar] [CrossRef]
- Ye, N.; Chen, L.; Ouyang, Q.; An, J. Time-Efficient Data Download for Emergency UAV: Joint Optimization of On-Board Computation and Communication Under Energy Constraint. IEEE Trans. Veh. Technol. 2023, 72, 13718–13722. [Google Scholar] [CrossRef]
- Chen, H.; He, J.; Meng, S.; Wu, S. Semantic Segmentation Aided Image Transmission for Maritime UAV Surveillance Network. In Proceedings of the 2023 International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou China, 2–4 November 2023; IEEE: Piscataway, NJ, USA, 2023. [Google Scholar]
- Yang, W.; Liew, Z.Q.; Lim, W.Y.B.; Xiong, Z.; Niyato, D.; Chi, X.; Cao, X.; Letaief, K.B. Semantic communication meets edge intelligence. IEEE Wirel. Commun. 2022, 29, 28–35. [Google Scholar] [CrossRef]
- Zeng, Y.; Chen, S.; Cui, Y.; Du, J. Efficient Trajectory Planning and Dynamic Resource Allocation for UAV-Enabled MEC System. IEEE Commun. Lett. 2024, 28, 597–601. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).