
Decentralized Retrofit Model Predictive Control of Inverter-Interfaced Small-Scale Microgrids

Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Contributions
- Proposing a retrofit MPC strategy for each DER within the SSMG with distances of less than 200 (m) among DERs, which is equivalent to an ratio of , which is the typical ratio in low-voltage distribution systems [22] and is tackled for the first time in this paper.
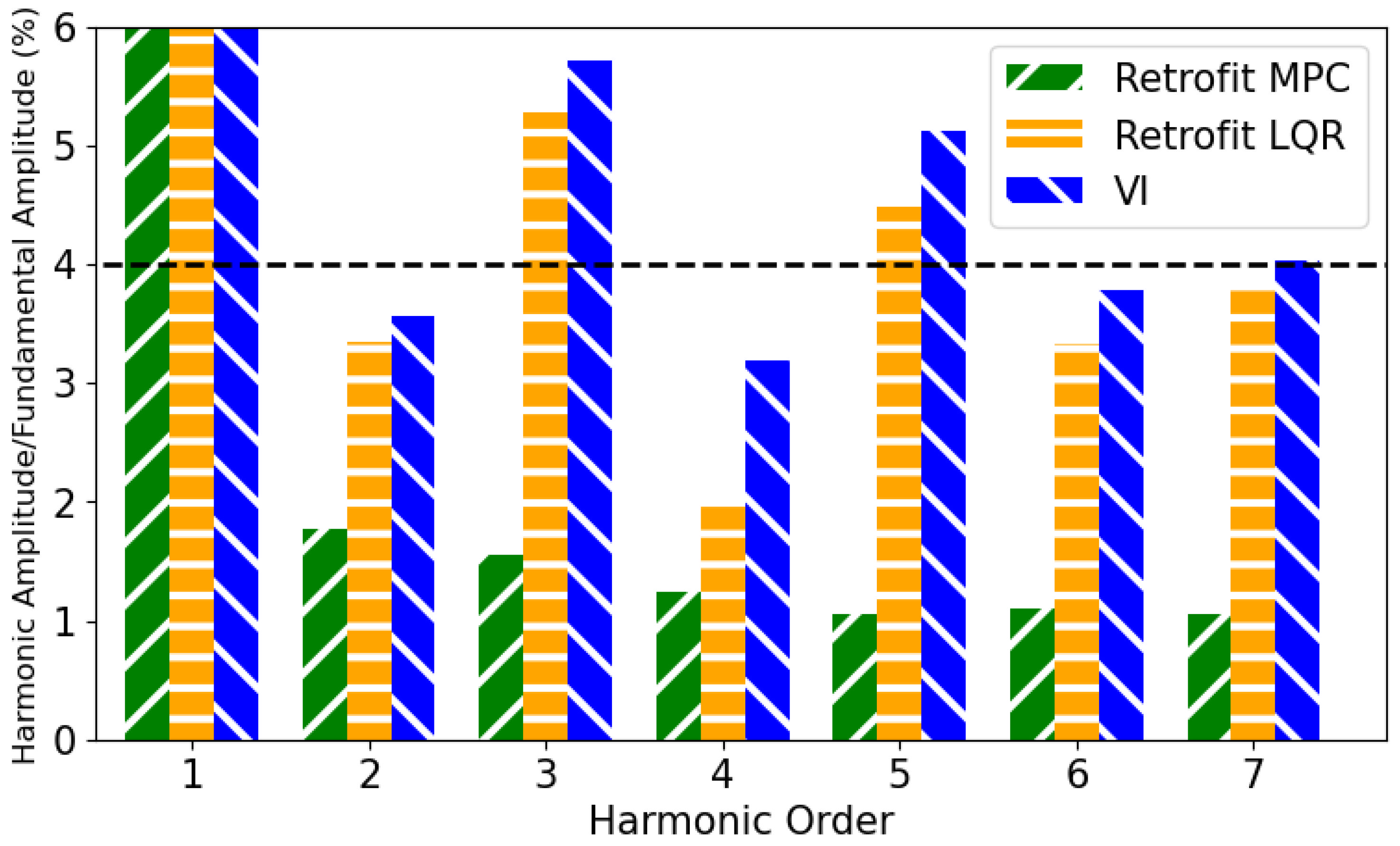
- Performing comprehensive simulations to illustrate the outperformance of the proposed control scheme over the VI and retrofit linear quadratic regulator (LQR) techniques (benchmarks) in terms of peak-load demand, plug-and-play operation, and nonlinear load.
2. Preliminaries and Problem Statement
2.1. Modeling of Voltage Source Inverter System
2.2. Design of Voltage Source Inverter Robust Controllers
2.3. Problem Statement
3. Proposed Retrofit Model Predictive Control
3.1. Retrofit Controller
- To limit the interconnection current to prevent instability;
- To provide plug-and-play capability for DERs;
- To guarantee robustness against peak-load demand, nonlinear load, and LC filter parameter variations.
3.2. State-Space Model of Robust Closed-Loop System
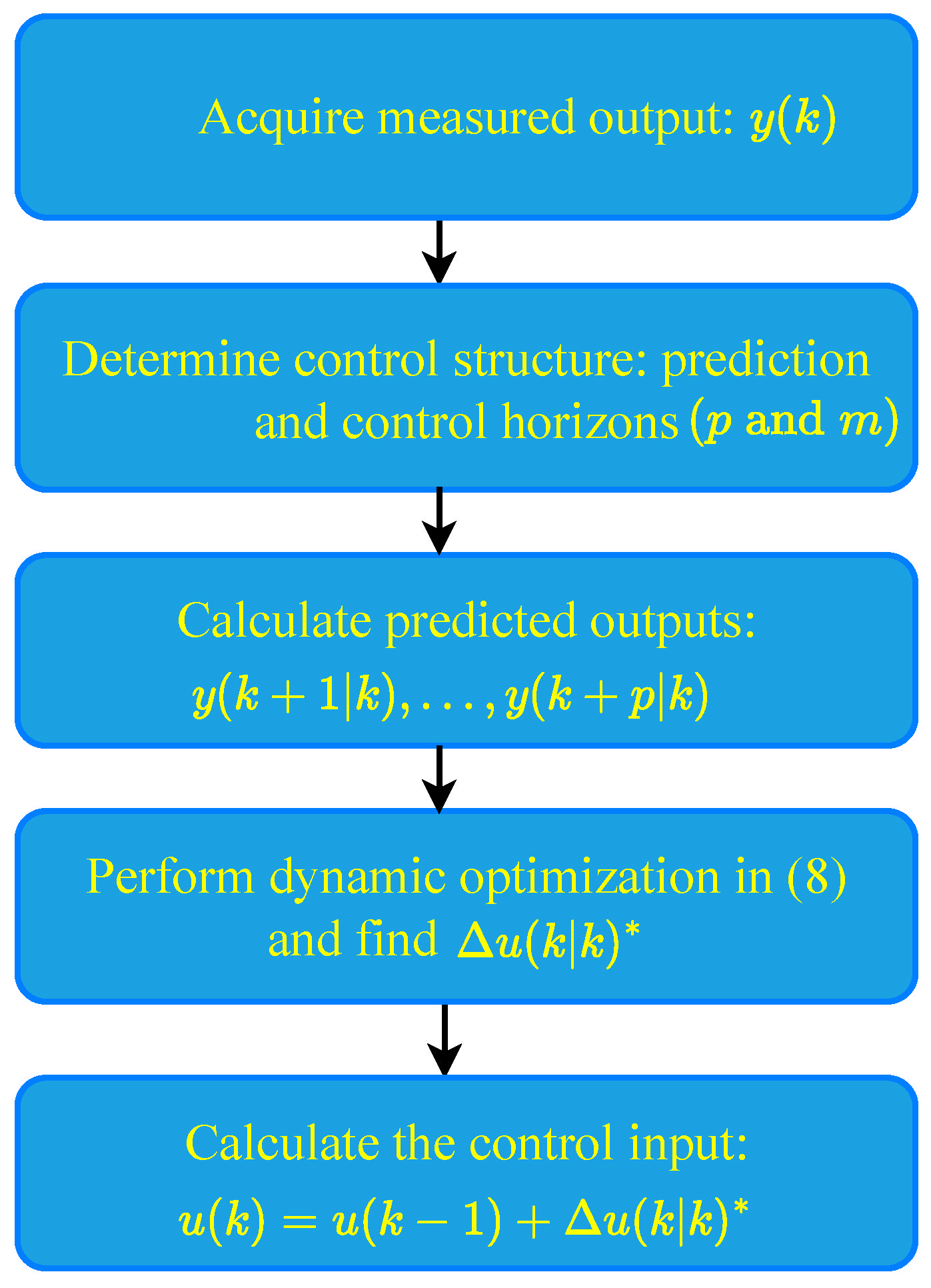
3.3. Model Predictive Control (MPC)
- Acquire the current values of measured output .
- Determine the control structure: prediction and control horizons (p and m).
- Calculate predicted outputs: .
- Perform the optimization in (8) to compute the sequence of control increments , , …, , and set
- Calculate the control input: .
4. Simulation Results
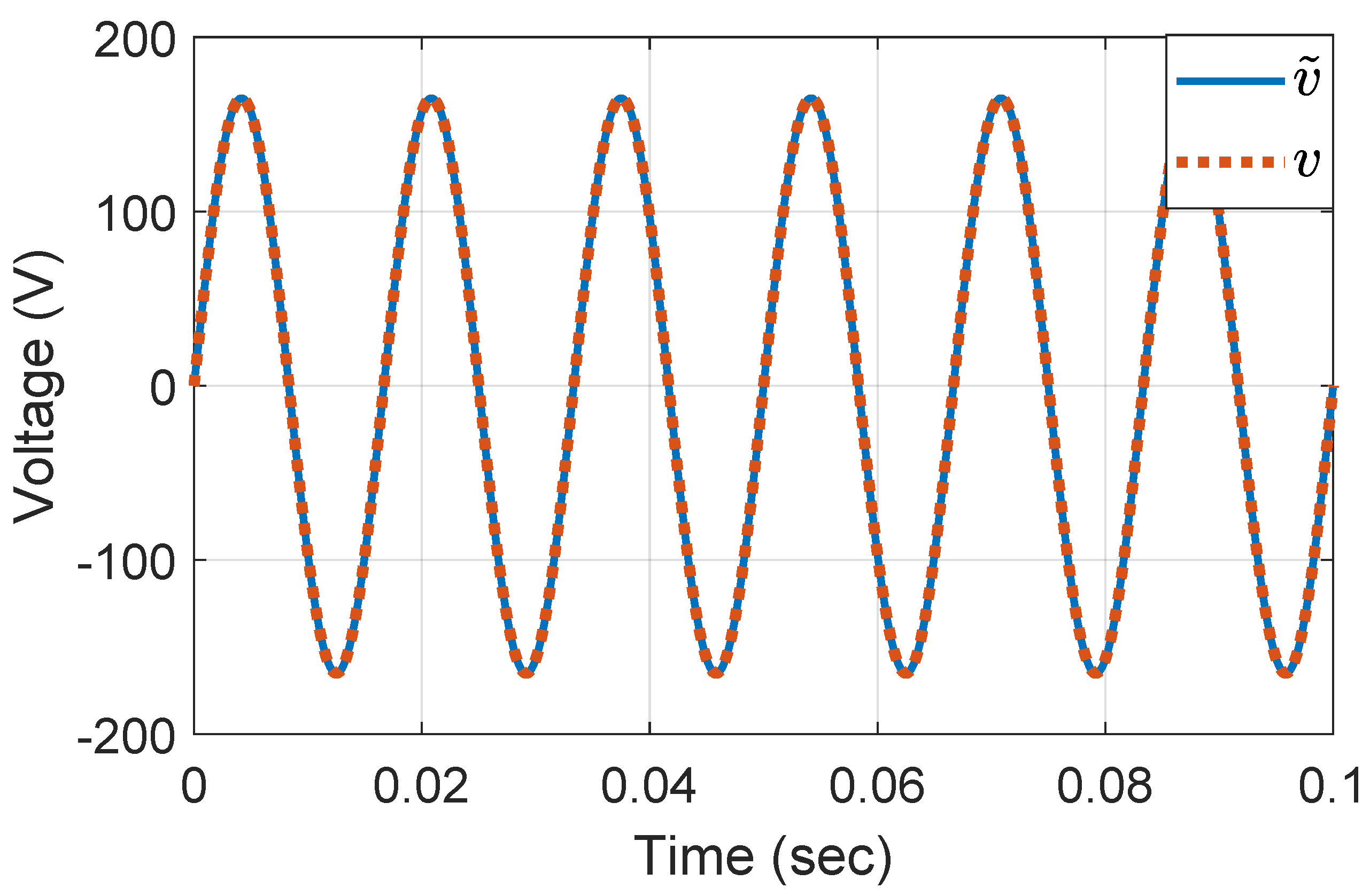
4.1. Time Response for Nominal Load
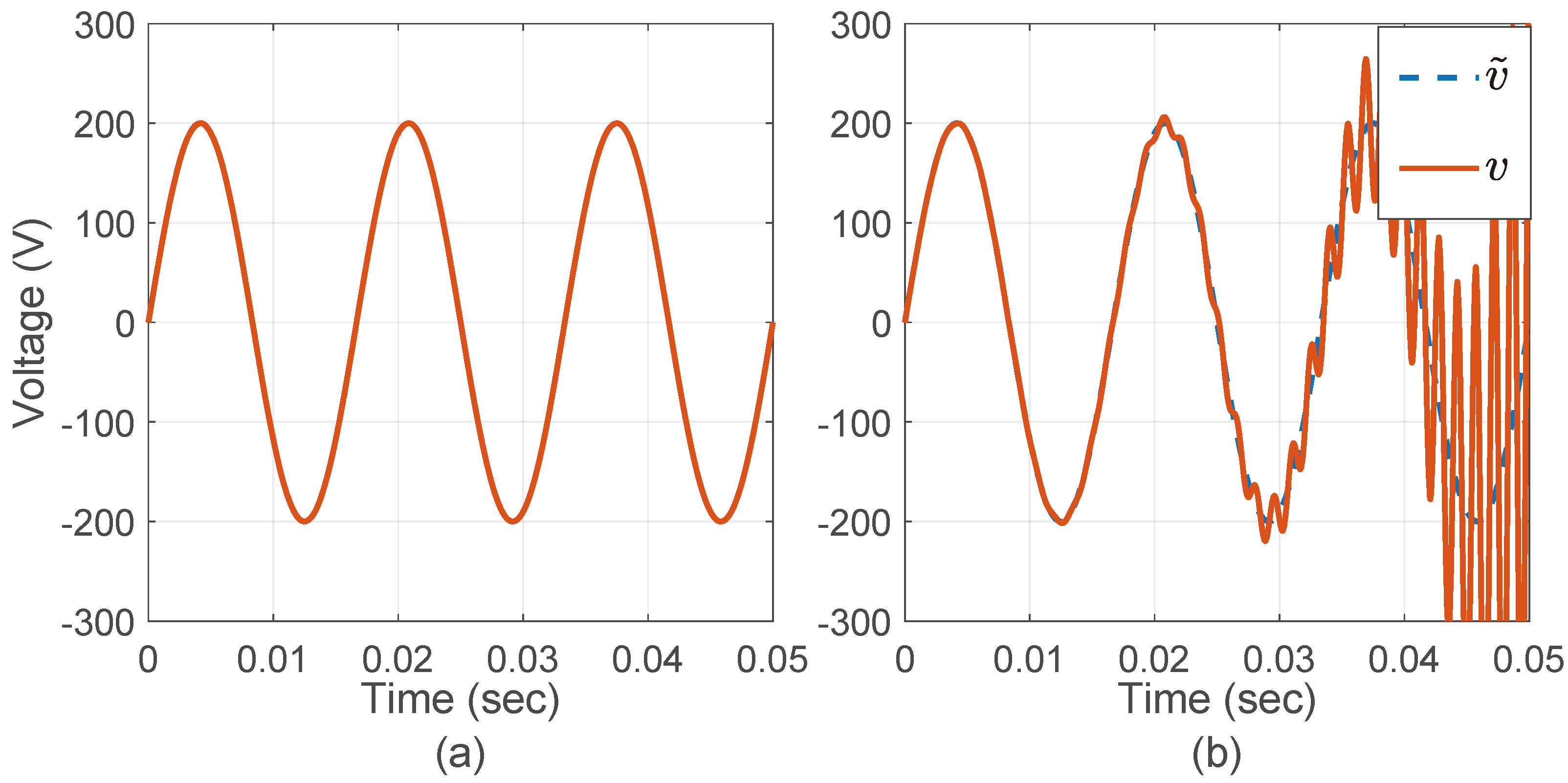
4.2. Peak-Load Analysis
4.3. Plug-And-Play Capability
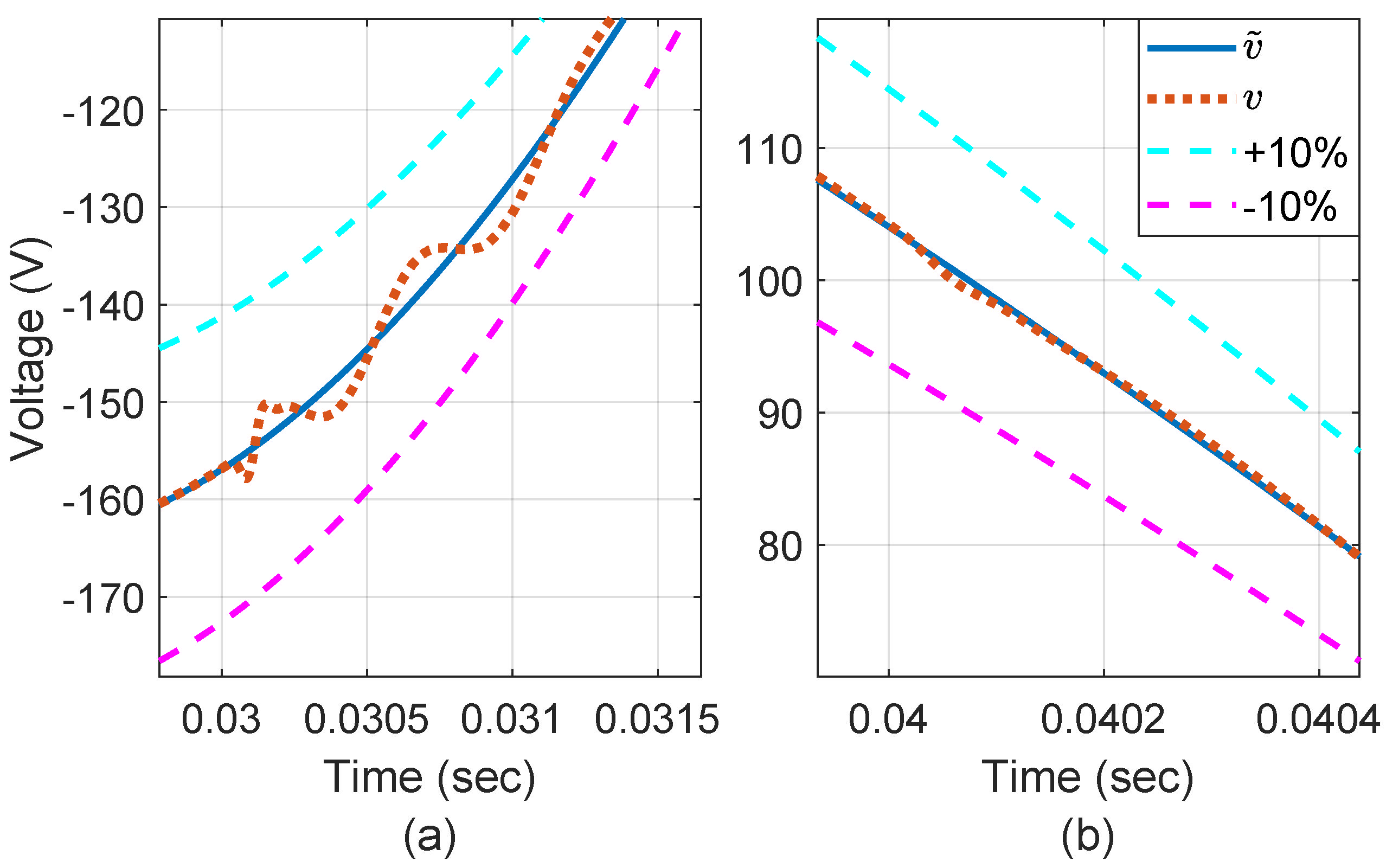
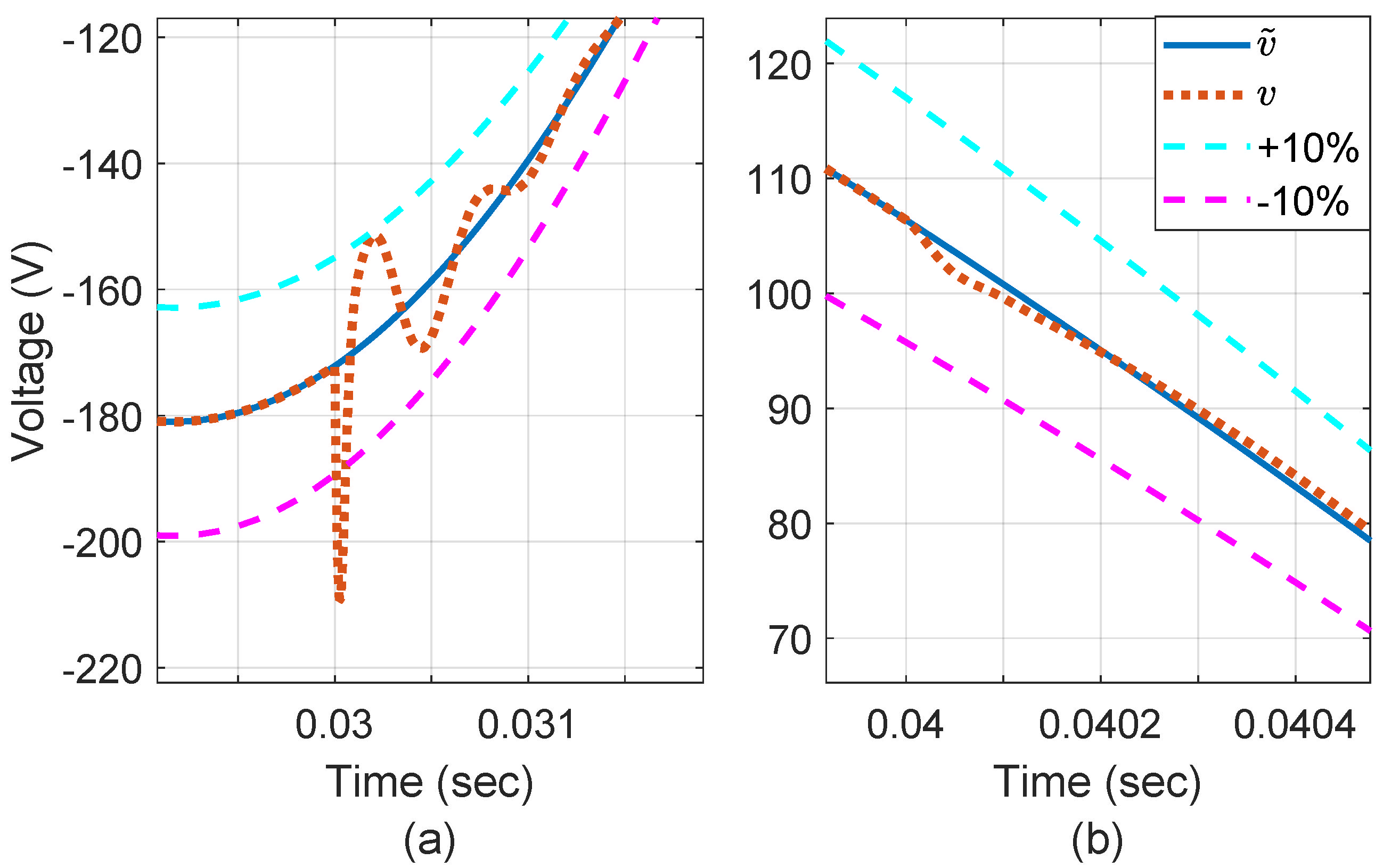
4.4. Effect of Nonlinear Load
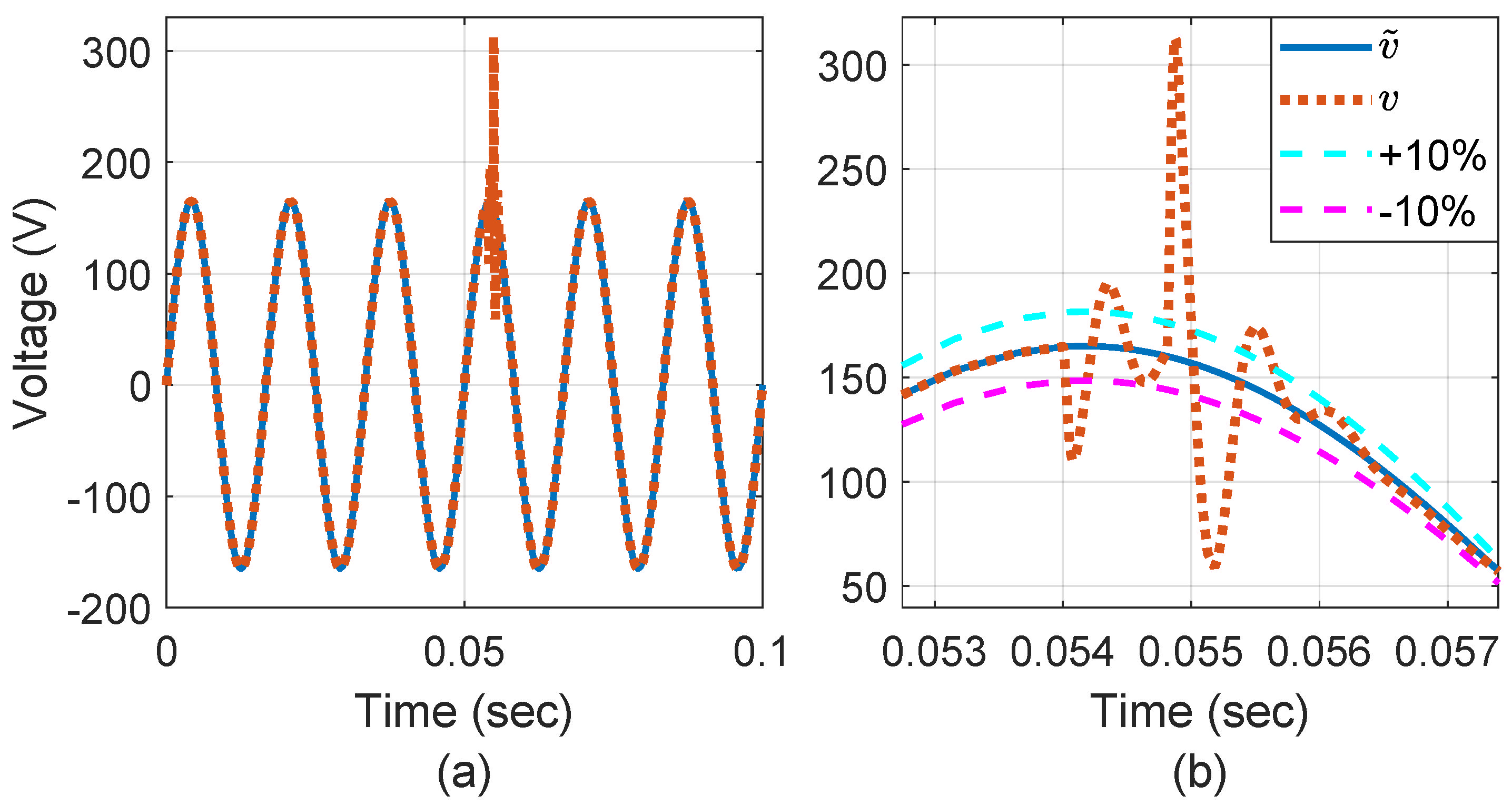
4.5. Robustness
4.6. Inverter Efficiency
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Haidar, A.M.; Muttaqi, K.; Sutanto, D. Smart Grid and its future perspectives in Australia. Renew. Sustain. Energy Rev. 2015, 51, 1375–1389. [Google Scholar] [CrossRef]
- Uski, S.; Kim, I. Assessment of wind power impact on power system transmission losses. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Europe, Istanbul, Turkey, 12–15 October 2014; pp. 1–5. [Google Scholar]
- Shakiba, F.M.; Azizi, S.M.; Zhou, M.; Abusorrah, A. Application of machine learning methods in fault detection and classification of power transmission lines: A survey. Artif. Intell. Rev. 2023, 56, 5799–5836. [Google Scholar] [CrossRef]
- The Global Carbon Project. Available online: https://www.globalcarbonproject.org/ (accessed on 16 July 2024).
- IEA. Number of People without Access to Electricity Worldwide from 2000 to 2021, by Region (in Millions). Available online: https://www.statista.com/statistics/829803/number-of-people-without-access-to-electricity-by-region/ (accessed on 16 July 2024).
- Akinyele, D.; Rayudu, R.; Nair, N. Development of photovoltaic power plant for remote residential applications: The socio-technical and economic perspectives. Appl. Energy 2015, 155, 131–149. [Google Scholar] [CrossRef]
- Li, P.; Yu, D.; Yang, M.; Wang, J. Flexible Look-Ahead Dispatch Realized by Robust Optimization Considering CVaR of Wind Power. IEEE Trans. Power Syst. 2018, 33, 5330–5340. [Google Scholar] [CrossRef]
- Shim, J.W.; Verbič, G.; Hur, K. Stochastic Eigen-Analysis of Electric Power System With High Renewable Penetration: Impact of Changing Inertia on Oscillatory Modes. IEEE Trans. Power Syst. 2020, 35, 4655–4665. [Google Scholar] [CrossRef]
- Shojaee, M.; Azizi, S.M. Sequential Design of Decentralized Robust Controllers for Strongly Interconnected Inverter-Based Distributed Generation Systems: A Comparative Study versus Independent Design. Energies 2022, 15, 8995. [Google Scholar] [CrossRef]
- Khan, A.; Khan, M.M.; Li, Y.; Chuanwen, J.; Shahid, M.U.; Khan, I. A robust control scheme for voltage and reactive power regulation in islanded AC microgrids. Electr. Power Syst. Res. 2022, 210, 108179. [Google Scholar] [CrossRef]
- Zhong, W.; Tzounas, G.; Milano, F. Improving the power system dynamic response through a combined voltage-frequency control of distributed energy resources. IEEE Trans. Power Syst. 2022, 37, 4375–4384. [Google Scholar] [CrossRef]
- Derakhshan, S.; Shafiee-Rad, M.; Shafiee, Q.; Jahed-Motlagh, M.R. Decentralized Robust LMI-based Voltage Control Strategy for Autonomous Inverter-Interfaced Multi-DG Microgrids. IEEE Trans. Power Syst. 2022, 38, 3003–3015. [Google Scholar] [CrossRef]
- Sadabadi, M.S.; Shafiee, Q.; Karimi, A. Plug-and-Play Voltage Stabilization in Inverter-Interfaced Microgrids via a Robust Control Strategy. IEEE Trans. Control Syst. Technol. 2017, 25, 781–791. [Google Scholar] [CrossRef]
- Azizi, S.M.; Khajehoddin, S.A. Robust inverter control design in islanded microgrids using μ-synthesis. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Vijay, A.S.; Parth, N.; Doolla, S.; Chandorkar, M.C. An Adaptive Virtual Impedance Control for Improving Power Sharing Among Inverters in Islanded AC Microgrids. IEEE Trans. Smart Grid 2021, 12, 2991–3003. [Google Scholar] [CrossRef]
- Alfaro, C.; Guzman, R.; De Vicuna, L.G.; Komurcugil, H.; Martín, H. Distributed direct power sliding-mode control for islanded AC microgrids. IEEE Trans. Ind. Electron. 2021, 69, 9700–9710. [Google Scholar] [CrossRef]
- Mosayebi, M.; Gheisarnejad, M.; Khooban, M.H. An Intelligent Type-2 Fuzzy Stabilization of Multi-DC Nano Power Grids. IEEE Trans. Emerg. Top. Comput. Intell. 2021, 5, 854–859. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, D.; Wang, Y.; Sun, M.; Strbac, G. Graph Learning-Based Voltage Regulation in Distribution Networks with Multi-Microgrids. IEEE Trans. Power Syst. 2023, 39, 1881–1895. [Google Scholar] [CrossRef]
- Afshari, A.; Davari, M.; Karrari, M.; Gao, W.; Blaabjerg, F. A Multivariable, Adaptive, Robust, Primary Control Enforcing Predetermined Dynamics of Interest in Islanded Microgrids Based on Grid-Forming Inverter-Based Resources. IEEE Trans. Autom. Sci. Eng. 2023, 11, 92589–92616. [Google Scholar] [CrossRef]
- He, L.; Li, Y.; Guerrero, J.M.; Cao, Y. A Comprehensive Inertial Control Strategy for Hybrid AC/DC Microgrid With Distributed Generations. IEEE Trans. Smart Grid 2020, 11, 1737–1747. [Google Scholar] [CrossRef]
- Abadi, S.A.G.K.; Khalili, T.; Habibi, S.I.; Bidram, A.; Guerrero, J.M. Adaptive control and management of multiple nano-grids in an islanded dc microgrid system. IET Gener. Transm. Distrib. 2022, 17, 1799–1815. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Xu, Y.; Yi, Z. Chapter 3–Optimal distributed secondary control for an islanded microgrid. In Distributed Control Methods and Cyber Security Issues in Microgrids; Academic Press: Cambridge, MA, USA, 2020; pp. 59–81. [Google Scholar]
- Caiazzo, B.; Lui, D.G.; Petrillo, A.; Santini, S. Cooperative Adaptive PID-Like Voltage Regulation in Inverter-Based Islanded Microgrids Under Unknown Uncertainties. IEEE Syst. J. 2023, 17, 4395–4406. [Google Scholar] [CrossRef]
- Jha, S.K.; Kumar, D.; Tripathi, P.R.; Appasani, B.; Zawbaa, H.M.; Kamel, S. An adaptive vector control method for inverter-based stand-alone microgrids considering voltage reduction and load shedding schemes. IET Gener. Transm. Distrib. 2023, 17, 2703–2717. [Google Scholar] [CrossRef]
- Amouzegar Ashtiani, N.; Azizi, S.M.; Khajehoddin, S.A. Robust Control Design for High-Power Density PV Converters in Weak Grids. IEEE Trans. Control Syst. Technol. 2019, 27, 2361–2373. [Google Scholar] [CrossRef]
- Azizi, S.M. Robust Controller Synthesis and Analysis in Inverter-Dominant Droop-Controlled Islanded Microgrids. IEEE/CAA J. Autom. Sin. 2021, 8, 1401–1415. [Google Scholar] [CrossRef]
- Shojaee, M.; Azizi, S.M. Decentralized Robust Control of a Coupled Wind Turbine and Diesel Engine Generator System. IEEE Trans. Power Syst. 2023, 38, 807–817. [Google Scholar] [CrossRef]
- Ishizaki, T.; Sadamoto, T.; Imura, J.i.; Sandberg, H.; Johansson, K.H. Retrofit control: Localization of controller design and implementation. Automatica 2018, 95, 336–346. [Google Scholar] [CrossRef]
- Sadamoto, T.; Ishizaki, T.; Imura, J.i.; Sandberg, H.; Johansson, K.H. Retrofitting state feedback control of networked nonlinear systems based on hierarchical expansion. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 3432–3437. [Google Scholar]
- Sadamoto, T.; Chakrabortty, A.; Ishizaki, T.; Imura, J.i. Retrofit control of wind-integrated power systems. IEEE Trans. Power Syst. 2017, 33, 2804–2815. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M.; Ricker, N.L. Model predictive control toolbox user’s guide. Mathworks 2010. [Google Scholar]
- IEEE Std 1250 (Revision of IEEE Std 1250-2011); Guide for Identifying and Improving Voltage Quality in Power System. IEEE: Piscataway, NJ, USA, 2018; p. 27.
- Anderson, H.C.; Al Hadi, A.; Jones, E.S.; Ionel, D.M. Power Factor and Reactive Power in US Residences – Survey and EnergyPlus Modeling. In Proceedings of the 2021 10th International Conference on Renewable Energy Research and Application (ICRERA), Istanbul, Turkey, 26–29 September 2021; pp. 418–422. [Google Scholar]
- Gheisarnejad, M.; Mohammadi-Moghadam, H.; Boudjadar, J.; Khooban, M.H. Active Power Sharing and Frequency Recovery Control in an Islanded Microgrid With Nonlinear Load and Nondispatchable DG. IEEE Syst. J. 2020, 14, 1058–1068. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, N.; Akella, A. A simulation based case study for control of DSTATCOM. ISA Trans. 2014, 53, 767–775. [Google Scholar] [CrossRef]
- Ranjbaran, A.; Ebadian, M. A power sharing scheme for voltage unbalance and harmonics compensation in an islanded microgrid. Electr. Power Syst. Res. 2018, 155, 153–163. [Google Scholar] [CrossRef]
- IEEE Std 1547-2003; Standard for Interconnecting Distributed Resources with Electric Power Systems. IEEE: Piscataway, NJ, USA, 2003; pp. 1–28. [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Voltage Control Scheme | R/X | Robustness Parameters | Overload Analysis | Nonlinear Load | P&P |
|---|---|---|---|---|---|---|
| [19] | Multivariable, adaptive, robust | 0.76 | NM | NM | ||
| [18] | MPC | NM | NM | NM | NM | |
| [24] | Adaptive PID | NM | NM | NM | NM | |
| [25] | Adaptive | NM | NM | NM | NM | |
| [10] | Impedance Estimator + Optimal | 0.32 | LC filter | NM | NM | |
| [11] | PI+washout filter | 1 | NM | NM | NM | |
| [12] | Robust LMI-based | 5.3 | LC filter | NM | NM | Yes |
| [13] | Robust LMI-based | 0.01 | LC filter | NM | NM | Yes |
| [16] | Sliding mode | 3.33 | LC filter | NM | Yes | |
| This work | Retrofit robust | 7.74 | LC filter | Yes |
| Inverter 1 | = 3.0 (mH), = 2.0 (F), = 1.0 (H), |
| Inverter 2 | = 2.8 (mH), = 2.2 (F), = 1.2 (H), |
| Inverter 3 | = 2.9 (mH), = 2.1 (F), = 0.9 (H), |
| Inverter 4 | = 3.2 (mH), = 2.3 (F), = 1.3 (H), |
| Inverter 5 | = 3.1 (mH), = 2.2 (F), = 1.1 (H), |
| Inverter 6 | = 2.7 (mH), = 1.9 (F), = 1.4 (H), |
| Interconnection Lines | = 0.642 (/km), (H/km) [22] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shojaee, M.; Azizi, S.M. Decentralized Retrofit Model Predictive Control of Inverter-Interfaced Small-Scale Microgrids. Electronics 2024, 13, 2914. https://doi.org/10.3390/electronics13152914
Shojaee M, Azizi SM. Decentralized Retrofit Model Predictive Control of Inverter-Interfaced Small-Scale Microgrids. Electronics. 2024; 13(15):2914. https://doi.org/10.3390/electronics13152914
Chicago/Turabian StyleShojaee, Milad, and S. Mohsen Azizi. 2024. "Decentralized Retrofit Model Predictive Control of Inverter-Interfaced Small-Scale Microgrids" Electronics 13, no. 15: 2914. https://doi.org/10.3390/electronics13152914