
Design a Robust Control System for Rubidium Fountain Clock

 ,
,
Abstract
:1. Introduction
2. Operation Principle of a Rb Fountain Clock
3. Control System
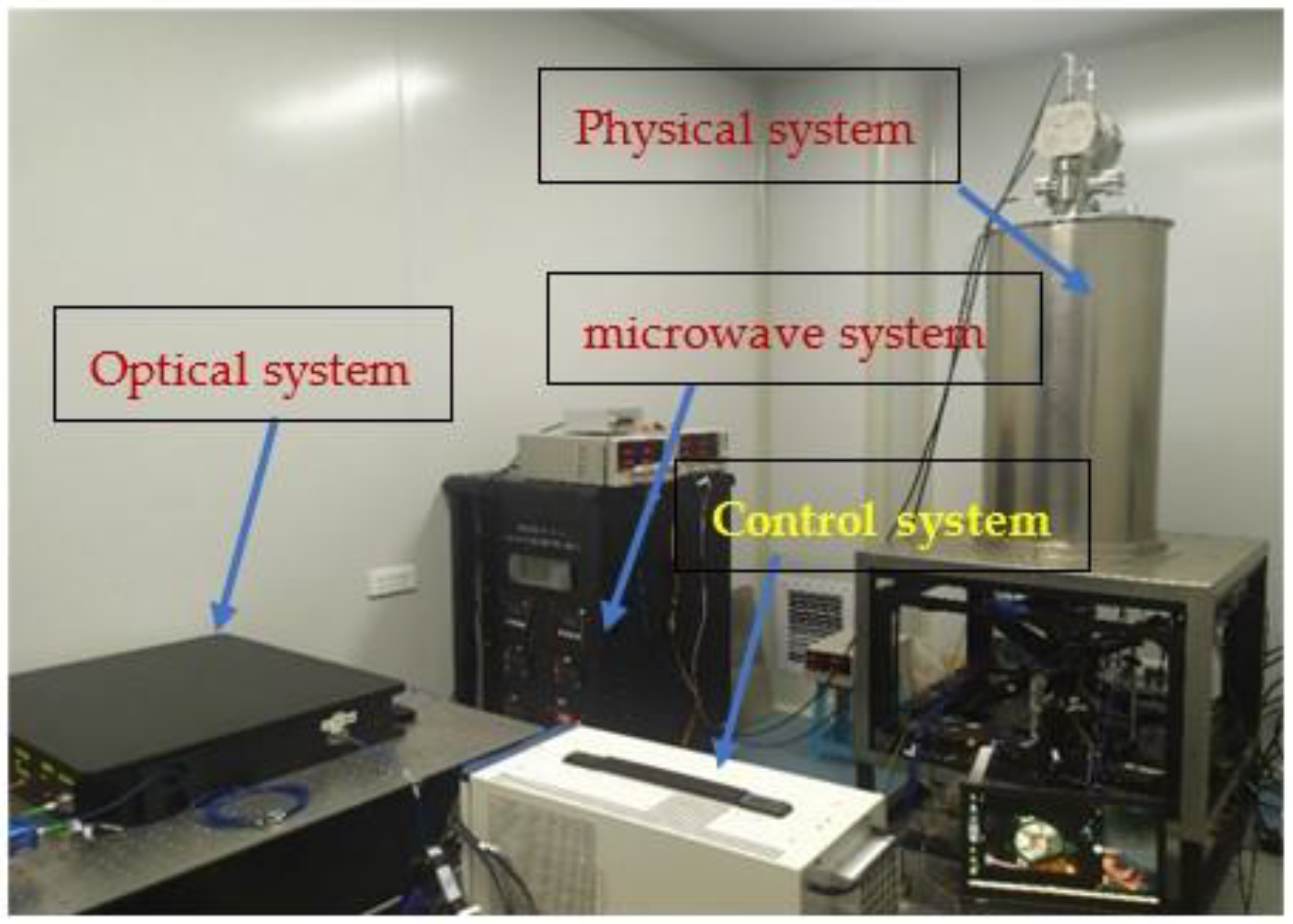
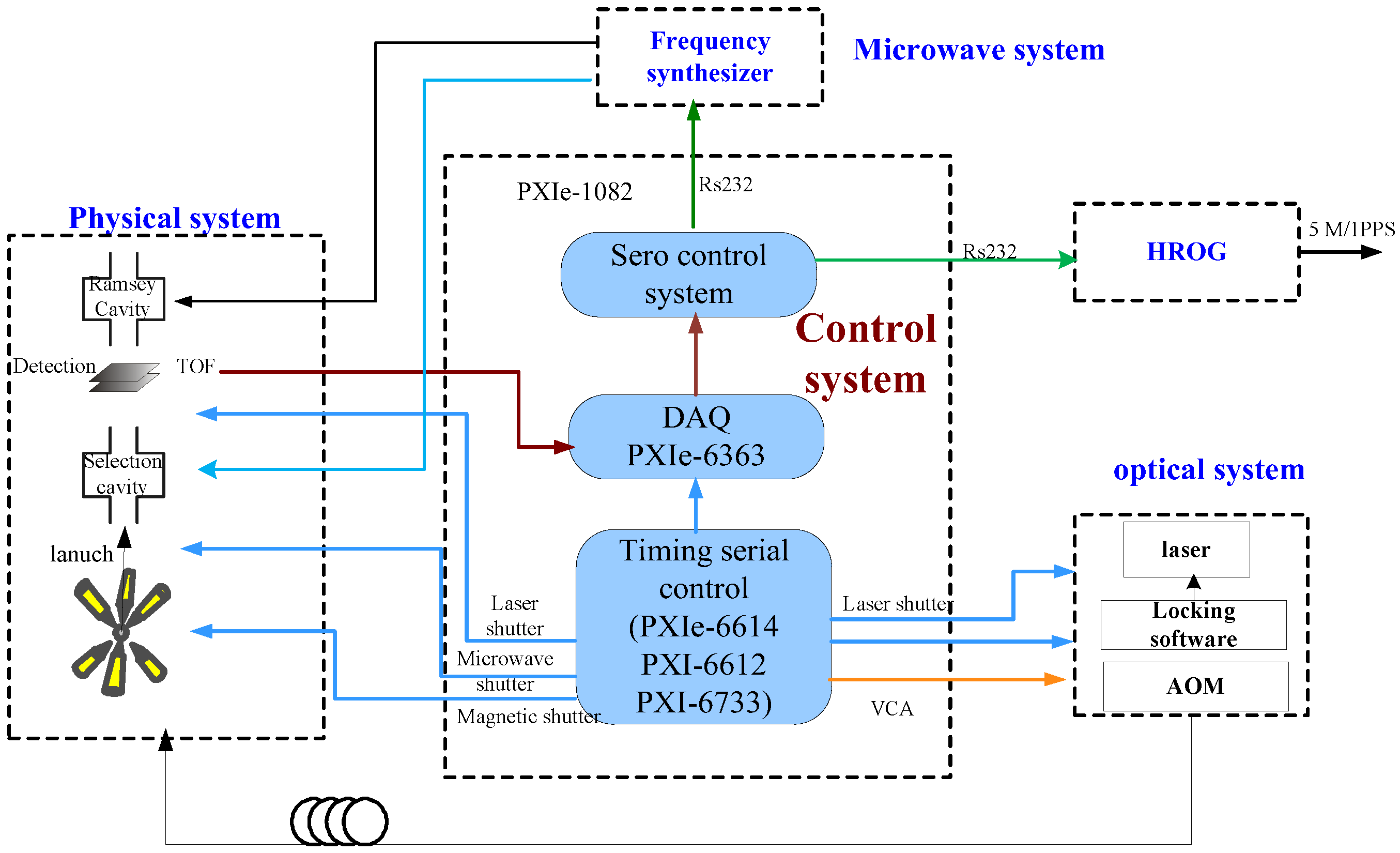
3.1. Control System Hardware
3.2. Control Software
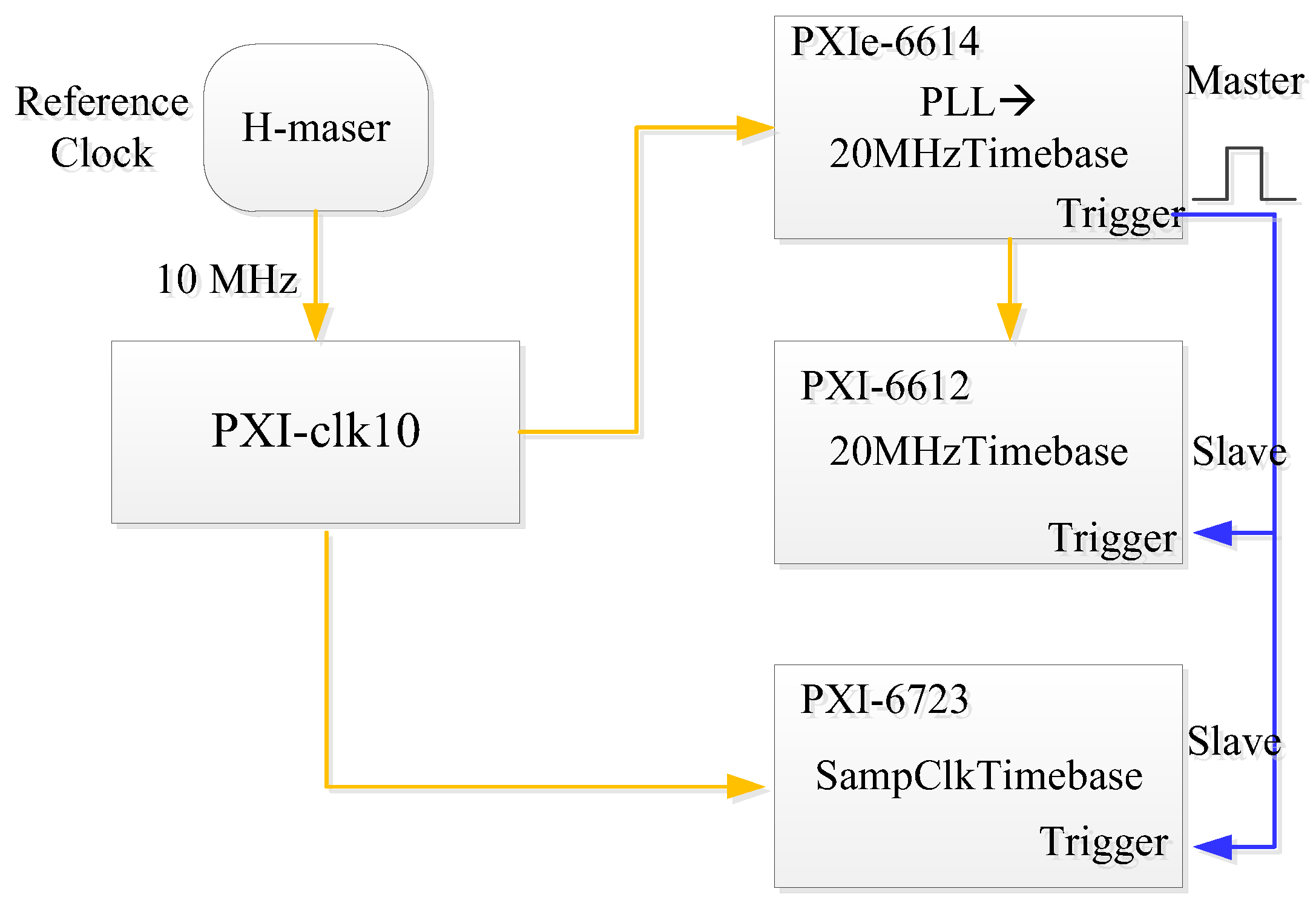
3.2.1. Timing Control System
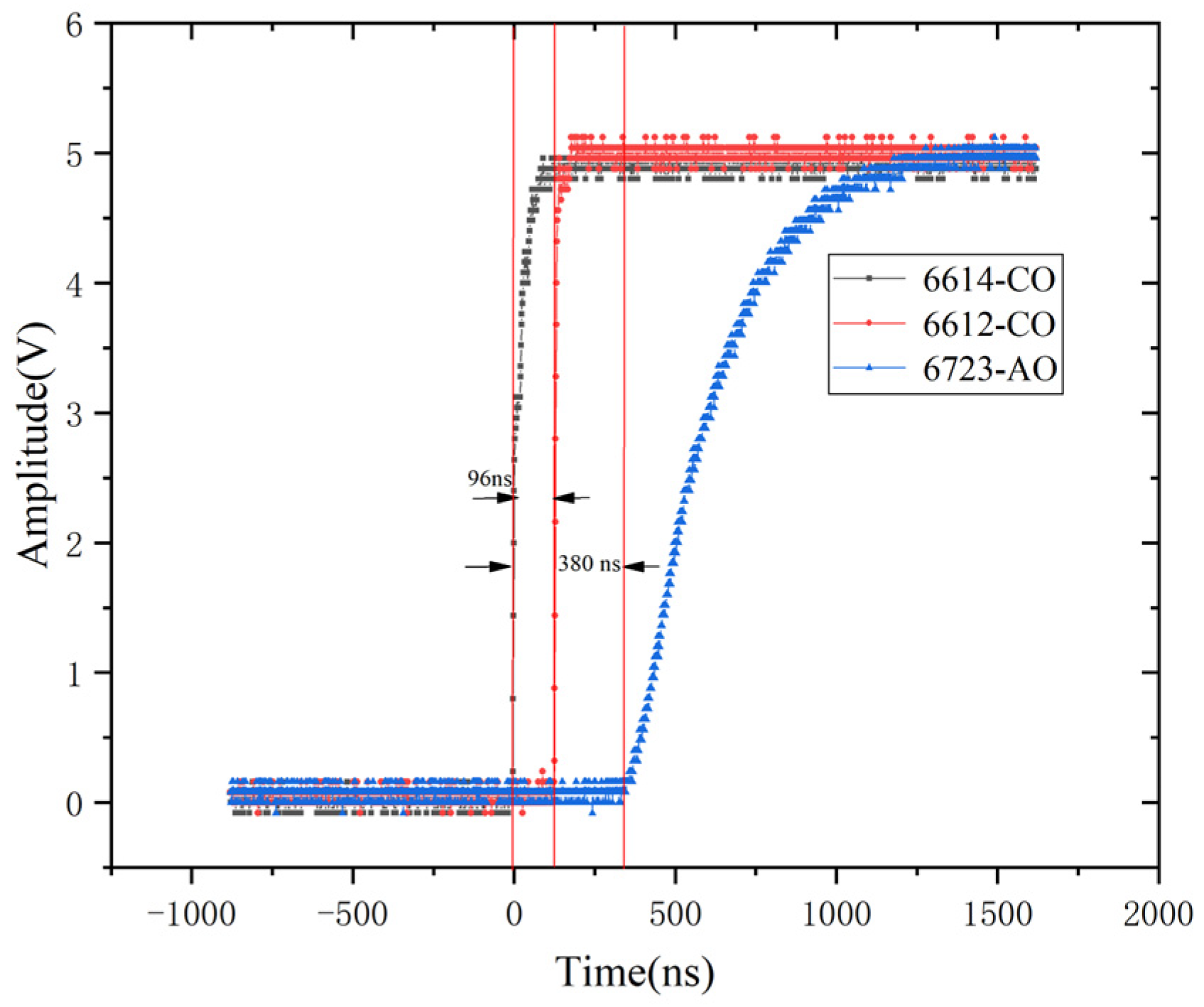
- Timing synchronization
3.2.2. Data Acquisition System
3.2.3. Servo Control System
4. Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guéna, J.; Abgrall, M.; Rovera, D.; Laurent, P.; Chupin, B.; Lours, M.; Santarelli, G.; Rosenbusch, P.; Tobar, M.E.; Li, R.; et al. Progress in Atomic Fountains at LNE-SYRTE. IEEE Trans. Uitrasonics Ferroelectr. Freq. Control 2012, 59, 391–410. [Google Scholar] [CrossRef] [PubMed]
- Weyers, S.; Gerginov, V.; Kazda, M.; Rahm, J.; Lipphardt, B.; Dobrev, G.; Gibble, K. Advances in the accuracy, stability, and reliability of the PTB primary fountain clocks. Metrologia 2018, 55, 789–822. [Google Scholar] [CrossRef]
- Peil, S.; Swanson, T.B.; Hanssen, J.; Taylor, J. Microwave-clock timescale with instability on order of 10−17. Metrologia 2017, 54, 247–252. [Google Scholar] [CrossRef]
- Peil, S.; Hanssen, J.; Swanson, T.B.; Taylor, J.; Ekstrom, C.R. The USNO rubidium fountains. J. Phys. Conf. Ser. 2016, 723, 012004. [Google Scholar] [CrossRef]
- Lorini, L.; Pavlenko, K.; Bize, S.; Desruelle, B.; Stern, G.; Doronin, I.; Pavlenko, Y.; Donchenko, S. Preliminary stability analysis of Rb fountains for timescale generation. In Proceedings of the 2017 Joint Conference of the European Frequency and Time Forum and IEEE International Frequency Control Symposium (EFTF/IFCS), Besancon, France, 9–13 July 2017; pp. 317–321. [Google Scholar]
- Blinov, I.; Boiko, A.; Kosheliaevskii, N.; Kupalova, O.; Sokolova, O. First Experiments on Application of Rb Fountain Frequency Standards for TA(SU) Time Scale Maintenance. In Proceedings of the 2018 European Frequency and Time Forum (EFTF), Torino, Italy, 10–12 April 2018; pp. 257–262. [Google Scholar]
- Owen, S.F.; Hall, D.S. Fast line-based experiment timing system for LabVIEW. Rev. Sci. Instrum. 2004, 75, 259–265. [Google Scholar] [CrossRef]
- Agraz, J.; Grunfeld, A.; Li, D.; Cunningham, K.; Willey, C.; Pozos, R.; Wagner, S. LabVIEW-based control software for para-hydrogen induced polarization instrumentation. Rev. Sci. Instrum. 2014, 85, 044705-1–044705-6. [Google Scholar] [CrossRef] [PubMed]
- Keshet, A.; Ketterle, W. A distributed, graphical user interface based, computer control system for atomic physics experiments. Rev. Sci. Instrum. 2013, 84, 015105-1–01515-5. [Google Scholar] [CrossRef] [PubMed]
- Jie, R.; Hui, L.; Benquan, L. Program control in transition observation of strontium optical lattice clock. Opt. Precis. Eng. 2016, 24, 50–58. [Google Scholar]
- Liu, K.; Chen, W.; Song, W. Development of Cold Atomic Fountain Clock Control System Based on LabVIEW. Metrol. Sci. Technol. 2020, 8, 1–7. [Google Scholar]
- Weiliang, C.; Fang, F.; Kun, L.; Fasong, Z.; Shaoyang, D.; Yani, Z.; Tianchu, L. Development of Rb fountain clock for time keeping. Frontiers 2022, 10, 956452. [Google Scholar] [CrossRef]
- Chen, W.; Liu, K.; Zheng, F.; Dai, S. Engineering Highly Reliable Rb fountain clock with a long-term instability of 2.6 × 10−16. Chin. J. Sci. Instrum. 2023, 44, 71–78. [Google Scholar]
- Shi, C.; Wei, R.; Li, T. Working for a mobile high accuracy (10–15) rubidium atomic. Sci. Sin. Phys. Mech. Astron. 2011, 41, 611–619. [Google Scholar]
- Cheng, H.N.; Zhang, Z.; Deng, S.; Ji, J.W.; Ren, W.; Xiang, J.F.; Zhao, J.B.; Zhao, X.; Ye, M.F.; Li, L.; et al. Design and operation of a transportable 87Rb atomic 02012 clock. Rev. Sci. Instrum. 2021, 92, 054702-1–054702-7. [Google Scholar] [CrossRef] [PubMed]
- Huang, S. Preliminary Construction of Electronic Control System for a Cesium Fountain Clock. Master’s Thesis, Huazhong University of Science & Technology, Wuhan, China, 2020. [Google Scholar]
- Wang, X.-W.; Yu, M.-Y.; Bai, Q.-S.; Du, R.-C.; Liu, L.-J. Design and implementation of control system for cold atom fountain clock based on Labview. J. Time Freq. 2024, 47, 81–91. [Google Scholar]
- Bai, Y.; Ruan, J.; Liu, D.; Fan, S.; Guan, Y.; Lei, P. Frequency Stabilization Technology of 1560 nm Fiber Laser based on Rubidium Modulation Transfer Spectroscopy. IEEE Photonics J. 2024. accepted. [Google Scholar] [CrossRef]
- Zhang, H.; Ruan, J.; Liu, D.; Yang, F.; Fan, S.; Bai, Y.; Guan, Y.; Wang, X.; Shi, J.; Zhang, S. Development and Preliminary Operation of 87Rb Continuously Running Atomic Fountain Clock at NTSC. IEEE Trans. Instrum. Meas. 2022, 71, 1008312. [Google Scholar] [CrossRef]
- Lin, R.; Liu, D.; Ruan, J.; Zhao, W.; Wang, X.; Chen, J.; Guan, Y.; Zhang, H.; Yu, F.; Shi, J.; et al. Laser power stabilization for the detection of the populations of the atomic double levels in Cs fountain clock. In Proceedings of the 2014 IEEE International Frequency Control Symposium (FCS), Taipei, Taiwan, 19–22 May 2014; pp. 414–416. [Google Scholar]
- National Instruments. Available online: https://www.ni.com/zh-cn.html (accessed on 20 April 2023).
- Liu, D.; Wang, X.; Lin, R.; Chen, J.; Zhang, H.; Ruan, J.; Guan, Y.; Yu, F.; Shi, J.; Zhang, S. The Research of control system for Cesium atomic fountain clock. In Proceedings of the 2014 IEEE International Frequency Control Symposium (FCS), Taipei, Taiwan, 19–22 May 2014; pp. 397–400. [Google Scholar]
- Szymaniec, K.; Park, E.; Marra, G.; Chalupczak, W. First accuracy evaluation of the NPL-CsF2 primary frequency standard. Metrologia 2010, 47, 363–376. [Google Scholar] [CrossRef]
- BIPM Circular T URL. Available online: https://www.bipm.org/en/time-ftp/circular-t (accessed on 15 August 2023).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channels | Sample Rate | Range | Resolution | Synchronization Accuracy | |
|---|---|---|---|---|---|
| CO | 16 | 80 MS/s | 0–5 V | — | <1 μs |
| AO | 3 | 100 KS/s | 0–10 V | 16 bits | |
| AI | 2 | 100 KS/s | −10–10 V | 16 bits | |
| Rs232 | 2 | — | — | — |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Zhang, H.; Bai, Y.; Fan, S.; Ruan, J.; Zhang, S. Design a Robust Control System for Rubidium Fountain Clock. Electronics 2024, 13, 3133. https://doi.org/10.3390/electronics13163133
Liu D, Zhang H, Bai Y, Fan S, Ruan J, Zhang S. Design a Robust Control System for Rubidium Fountain Clock. Electronics. 2024; 13(16):3133. https://doi.org/10.3390/electronics13163133
Chicago/Turabian StyleLiu, Dandan, Hui Zhang, Yang Bai, Sichen Fan, Jun Ruan, and Shougang Zhang. 2024. "Design a Robust Control System for Rubidium Fountain Clock" Electronics 13, no. 16: 3133. https://doi.org/10.3390/electronics13163133