
Integrated Mixed Attention U-Net Mechanisms with Multi-Stage Division Strategy Customized for Accurate Estimation of Lithium-Ion Battery State of Health


Abstract
1. Introduction
- An MMAU-Net method using a multi-stage strategy and a mixed-attention mechanism is proposed to accurately estimate battery SOH, which is more effective in extracting the aging information of batteries at multiple stages.
- A multi-stage division method based on geometric knee point segmentation is proposed to divide the battery’s multi-level degradation feature stages to enable the network to extract and recognize features more efficiently.
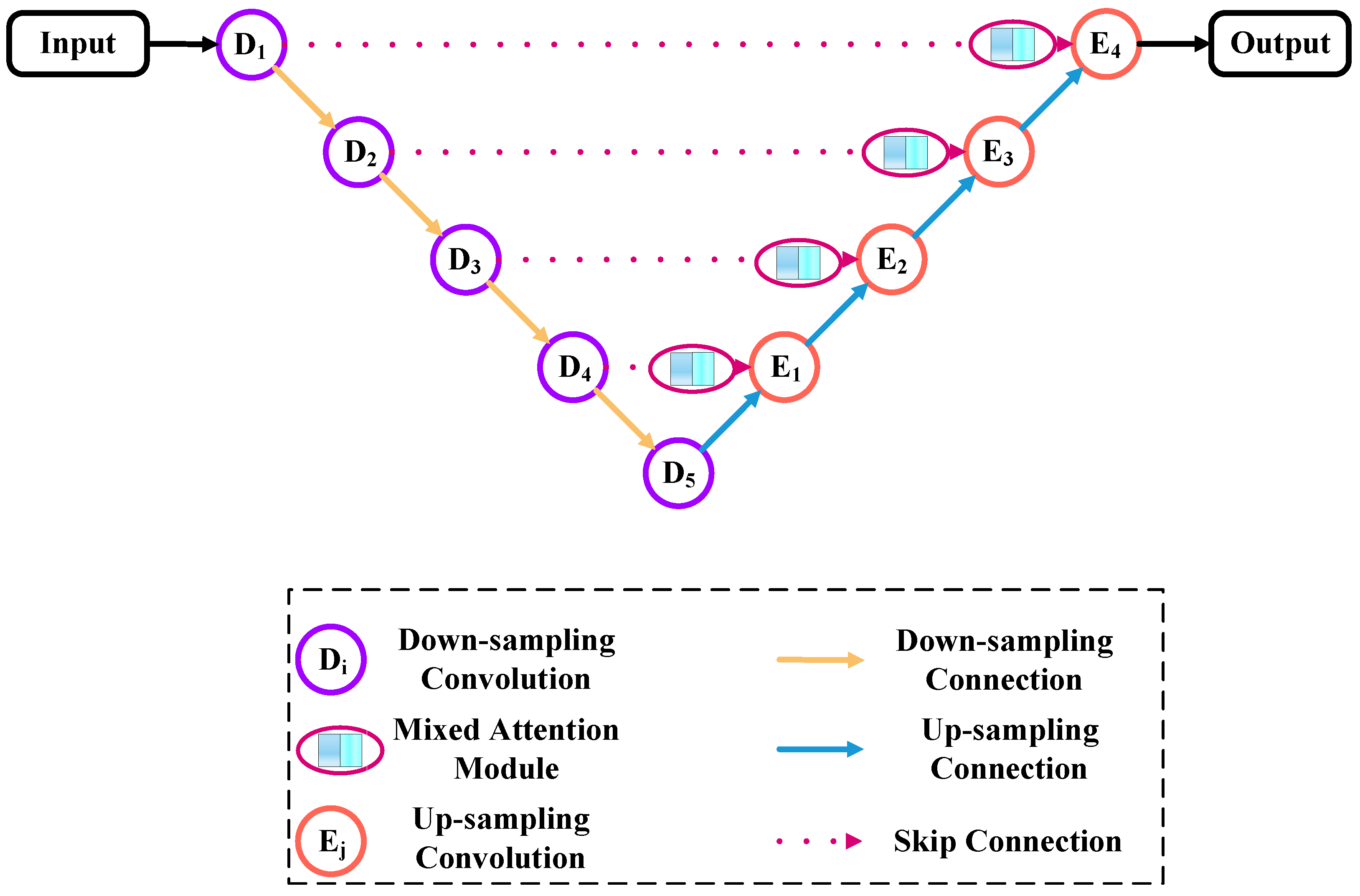
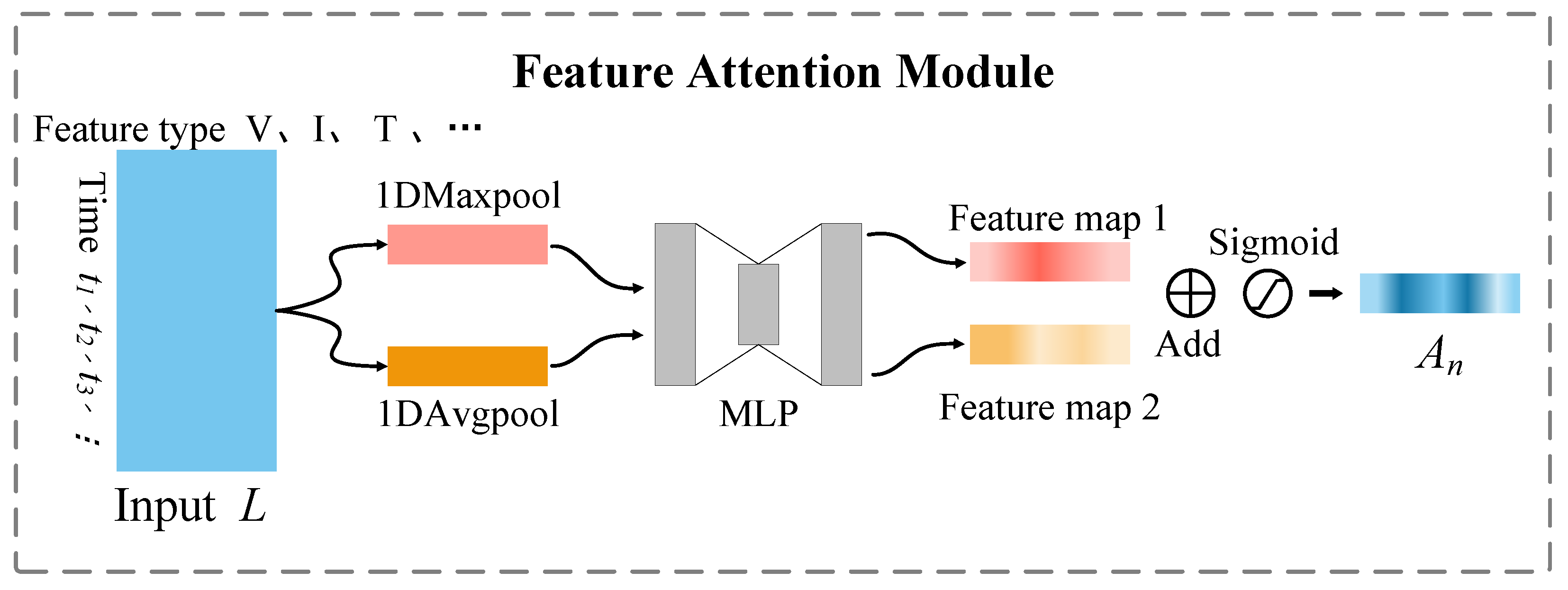
- A mixed attention U-Net model for degradation feature extraction is proposed. Using a one-dimensional (1D) operating module to accommodate battery degradation data inputs. The incorporation of a hybrid attention module into U-Net reduces the redundant information generated during feature extraction and improves the ability to focus on multi-level features.
2. Multi-Stage Division Method for Battery Degradation Performance Estimation
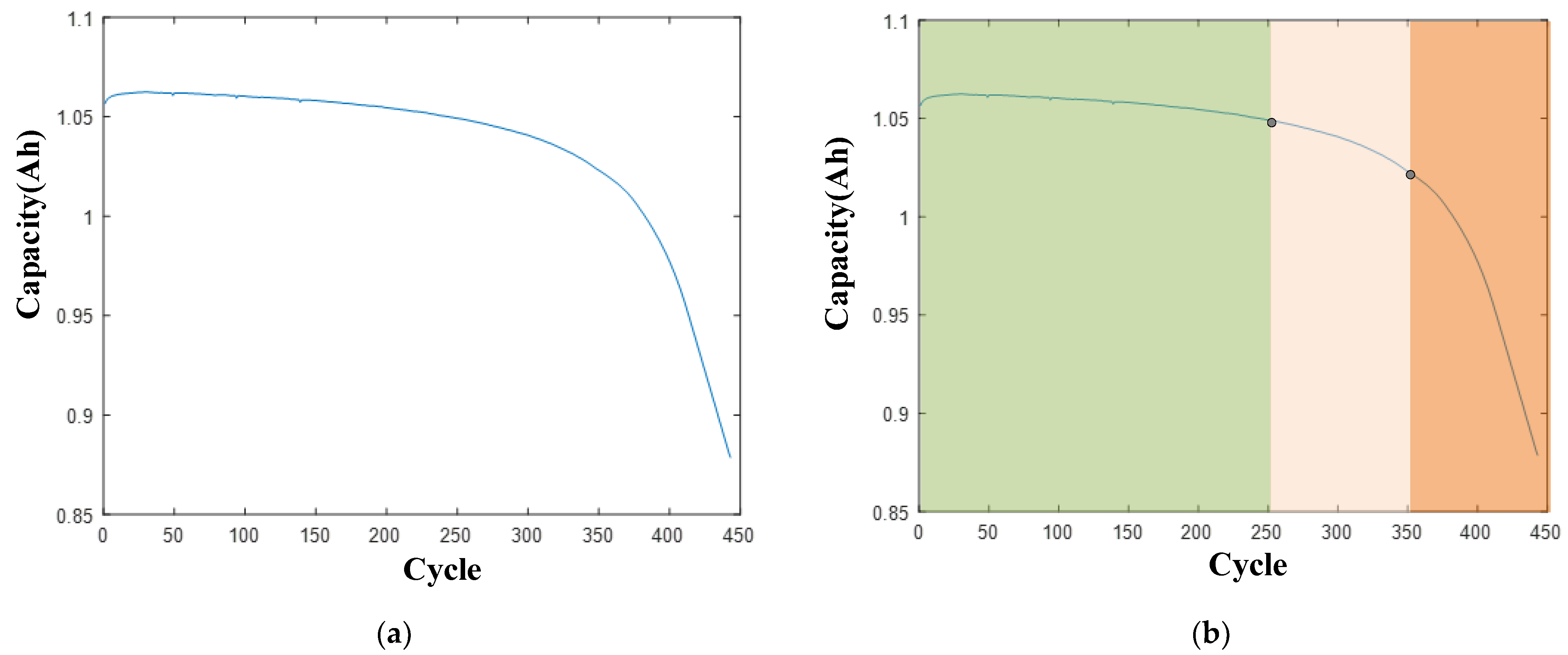
2.1. Overview of Battery Degradation Cycle
2.2. Battery Multi-Stage Characteristics
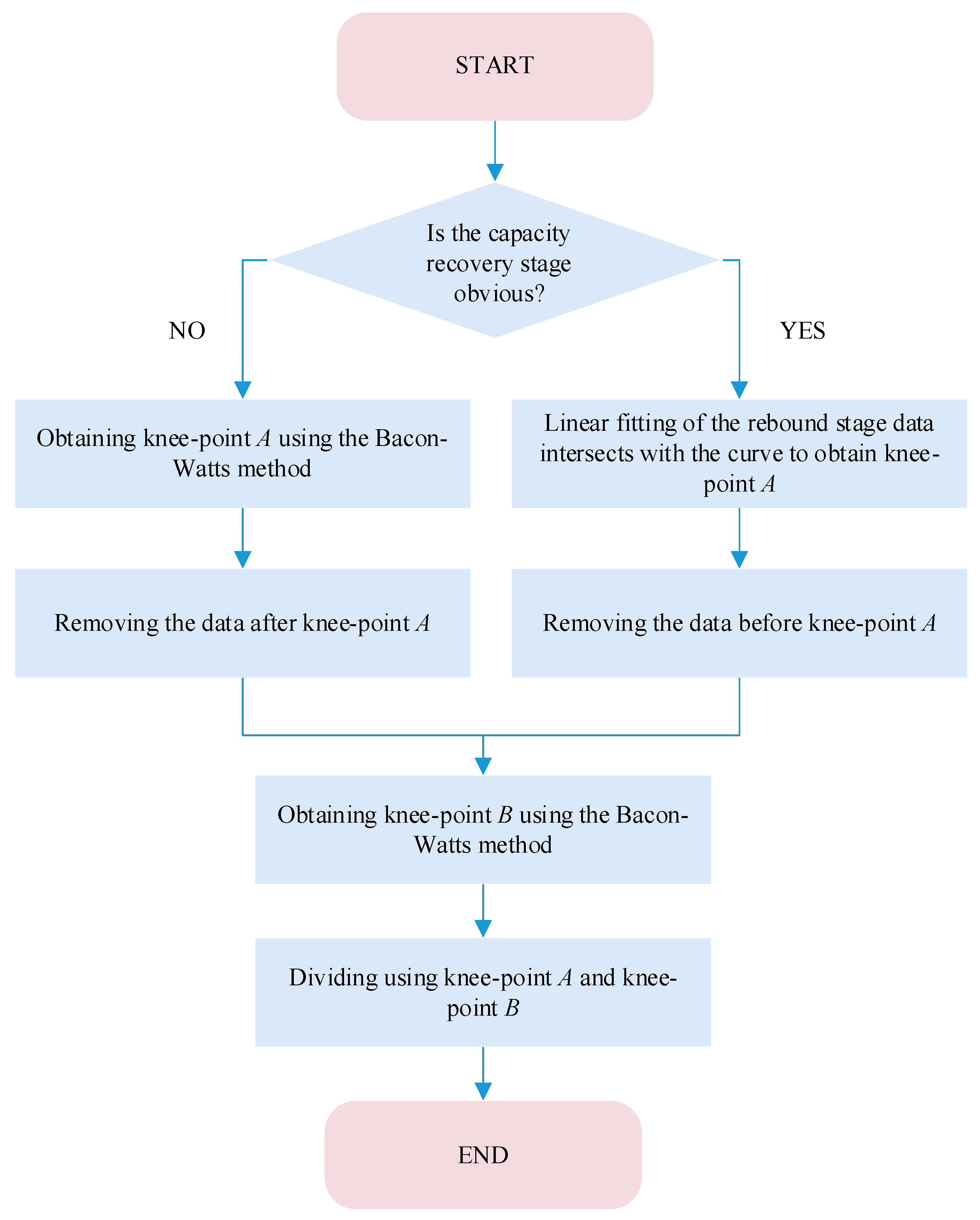
2.3. Multi-Stage Geometric Knee Point Division Method
3. The Proposed Encoder–Decoder Prediction Model
3.1. Review and Analysis of the Existing U-Net Model
3.2. Mixed Attention U-Net Network Architecture
3.2.1. Improved U-Net for SOH Estimation
3.2.2. Mixed Attention Module
4. Experimental Results
4.1. Datasets
4.2. Experiment Setting and Evaluation Metrics
4.3. Experimental Results and Analysis
4.3.1. Performance Evaluation of Multi-Stage Partitioning Strategy
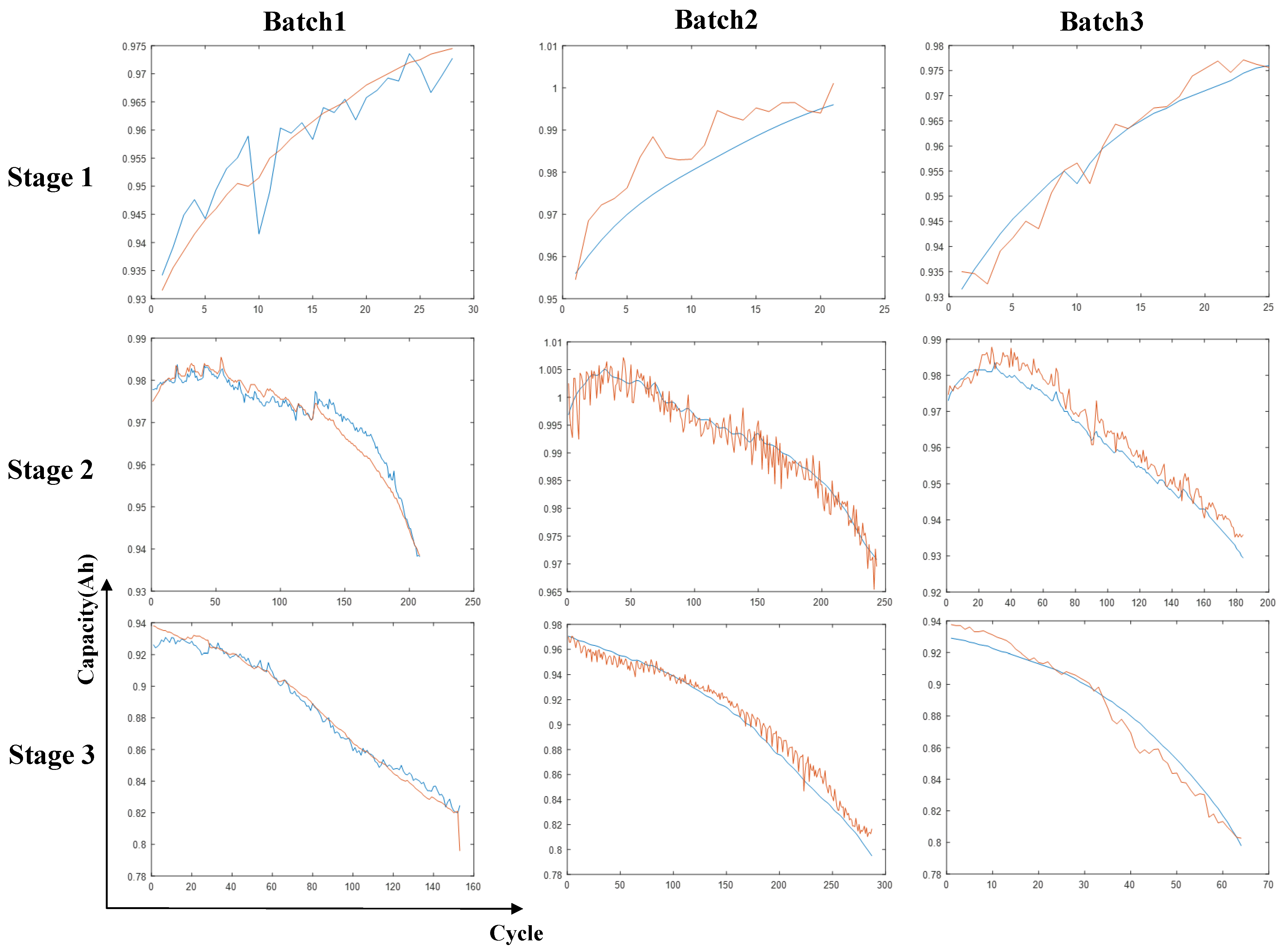
4.3.2. Performance Evaluation of the Proposed SOH Estimation Method
5. Conclusions
- (1)
- Considering the lack of specific stage division methods that incorporate multi-stage degradation performance of batteries, this paper transforms the multi-stage division task into the use of geometric division of multiple knee points by incorporating the practical significance of the knee point in battery degradation. The method is not only capable of categorizing battery degradation data based on degradation trends but is also simple to apply and interpretive.
- (2)
- In order to reduce the feature redundant information in the feature extraction process and improve the depth of degraded information extraction, this paper proposes an enhanced U-Net model with a hybrid attention mechanism. The mixed attention U-Net performs deep extraction of aging features through the encoder–decoder structure of U-Nets and reduces redundant feature information by incorporating hybrid attention. The mixed attention U-Net model, evaluated in Bach3 as MAE 0.86 and RMSE 1.08, performs well in the other batches, and also outperforms the LSTM, GRU, and MLP models in the remaining batches. The experimental results demonstrate the feasibility and validity of the proposed model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, J.; Hu, Y.; Zhu, Q.; Rashid, H.; Li, H. A novel battery health indicator and PSO-LSSVR for LiFePO4 battery SOH estimation during constant current charging. Energy 2023, 282, 128782. [Google Scholar] [CrossRef]
- Sayfutdinov, T.; Vorobev, P. Optimal utilization strategy of the LiFePO4 battery storage. Appl. Energy 2022, 316, 119080. [Google Scholar] [CrossRef]
- Wang, R.; Li, J.; Wang, X.; Wang, S.; Pecht, M. Deep learning model for state of health estimation of lithium batteries based on relaxation voltage. J. Energy Storage 2024, 79, 110189. [Google Scholar] [CrossRef]
- Li, C.; Yang, L.; Li, Q.; Zhang, Q.; Zhou, Z.; Meng, Y.; Zhao, X.; Wang, L.; Zhang, S.; Li, Y.; et al. SOH estimation method for lithium-ion batteries based on an improved equivalent circuit model via electrochemical impedance spectroscopy. J. Energy Storage 2024, 86, 111167. [Google Scholar] [CrossRef]
- Fu, J.; Wu, C.; Wang, J.; Haque, M.; Geng, L.; Meng, J. Lithium-ion battery SOH prediction based on VMD-PE and improved DBO optimized temporal convolutional network model. J. Energy Storage 2024, 87, 111392. [Google Scholar] [CrossRef]
- Xiong, R.; Li, L.; Li, Z.; Yu, Q.; Mu, H. An electrochemical model based degradation state identification method of Lithium-ion battery for all-climate electric vehicles application. Appl. Energy 2018, 219, 264–275. [Google Scholar] [CrossRef]
- Tran, M.-K.; Mathew, M.; Janhunen, S.; Panchal, S.; Raahemifar, K.; Fraser, R.; Fowler, M. A comprehensive equivalent circuit model for lithium-ion batteries, incorporating the effects of state of health, state of charge, and temperature on model parameters. J. Energy Storage 2021, 43, 103252. [Google Scholar] [CrossRef]
- Chang, Y.; Fang, H.; Zhang, Y. A new hybrid method for the prediction of the remaining useful life of a lithium-ion battery. Appl. Energy 2017, 206, 1564–1578. [Google Scholar] [CrossRef]
- Zhang, C.; Luo, L.; Yang, Z.; Du, B.; Zhou, Z.; Wu, J.; Chen, L. Flexible method for estimating the state of health of lithium-ion batteries using partial charging segments. Energy 2024, 295, 131009. [Google Scholar] [CrossRef]
- Liu, X.; Liu, X.; Fang, L.; Wu, M.; Wu, J. Dual particle swarm optimization based data-driven state of health estimation method for lithium-ion battery. J. Energy Storage 2022, 56, 105908. [Google Scholar] [CrossRef]
- Guo, F.; Lv, H.; Wu, X.; Yuan, X.; Liu, L.; Ye, J.; Wang, T.; Fu, L.; Wu, Y. A machine learning method for prediction of remaining useful life of supercapacitors with multi-stage modification. J. Energy Storage 2023, 73, 109160. [Google Scholar] [CrossRef]
- Guo, F.; Wu, X.; Liu, L.; Ye, J.; Wang, T.; Fu, L.; Wu, Y. Prediction of remaining useful life and state of health of lithium batteries based on time series feature and Savitzky-Golay filter combined with gated recurrent unit neural network. Energy 2023, 270, 126880. [Google Scholar] [CrossRef]
- Richardson, R.R.; Osborne, M.A.; Howey, D.A. Gaussian process regression for forecasting battery state of health. J. Power Sources 2017, 357, 209–219. [Google Scholar] [CrossRef]
- Klass, V.; Behm, M.; Lindbergh, G. A support vector machine-based state-of-health estimation method for lithium-ion batteries under electric vehicle operation. J. Power Sources 2014, 270, 262–272. [Google Scholar] [CrossRef]
- Li, Y.; Zou, C.; Berecibar, M.; Nanini-Maury, E.; Chan, J.C.-W.; Bossche, P.v.D.; Van Mierlo, J.; Omar, N. Random forest regression for online capacity estimation of lithium-ion batteries. Appl. Energy 2018, 232, 197–210. [Google Scholar] [CrossRef]
- Li, Y.; Liu, K.; Foley, A.M.; Zülke, A.; Berecibar, M.; Nanini-Maury, E.; Van Mierlo, J.; Hoster, H.E. Data-driven health estimation and lifetime prediction of lithium-ion batteries: A review. Renew. Sustain. Energy Rev. 2019, 113, 109254. [Google Scholar] [CrossRef]
- Acar, Z.; Nguyen, P.; Cui, X.; Lau, K.C. Room temperature ionic liquids viscosity prediction from deep-learning models. Energy Mater. 2023, 3, 300039. [Google Scholar] [CrossRef]
- Zhang, Z.; Min, H.; Guo, H.; Yu, Y.; Sun, W.; Jiang, J.; Zhao, H. State of health estimation method for lithium-ion batteries using incremental capacity and long short-term memory network. J. Energy Storage 2023, 64, 107063. [Google Scholar] [CrossRef]
- Hong, J.; Li, K.; Liang, F.; Yang, H.; Zhang, C.; Yang, Q.; Wang, J. A novel state of health prediction method for battery system in real-world vehicles based on gated recurrent unit neural networks. Energy 2024, 289, 129918. [Google Scholar] [CrossRef]
- Chen, S.-Z.; Liang, Z.; Yuan, H.; Yang, L.; Xu, F.; Fan, Y. A novel state of health estimation method for lithium-ion batteries based on constant-voltage charging partial data and convolutional neural network. Energy 2023, 283, 129103. [Google Scholar] [CrossRef]
- Liu, S.; Chen, Z.; Yuan, L.; Xu, Z.; Jin, L.; Zhang, C. State of health estimation of lithium-ion batteries based on multi-feature extraction and temporal convolutional network. J. Energy Storage 2024, 75, 109658. [Google Scholar] [CrossRef]
- Ma, Y.; Li, J.; Gao, J.; Chen, H. State of health prediction of lithium-ion batteries under early partial data based on IWOA-BiLSTM with single feature. Energy 2024, 295, 131085. [Google Scholar] [CrossRef]
- Lee, G.; Kwon, D.; Lee, C. A convolutional neural network model for SOH estimation of Li-ion batteries with physical interpretability. Mech. Syst. Signal Process. 2023, 188, 110004. [Google Scholar] [CrossRef]
- Zou, C.; Chen, X.; Zhang, Y. State of Health prediction of lithium-ion batteries based on temporal degeneration feature extraction with Deep Cycle Attention Network. J. Energy Storage 2023, 65, 107367. [Google Scholar] [CrossRef]
- Lin, M.; Wu, J.; Meng, J.; Wang, W.; Wu, J. State of health estimation with attentional long short-term memory network for lithium-ion batteries. Energy 2023, 268, 126706. [Google Scholar] [CrossRef]
- He, T.; Gong, Z. State of health estimation for lithium-ion batteries using a hybrid neural network model with Multi-scale Convolutional Attention Mechanism. J. Power Sources 2024, 609, 234680. [Google Scholar] [CrossRef]
- Hong, J.; Chen, Y.; Chai, Q.; Lin, Q.; Wang, W. State-of-health estimation of lithium-ion batteries using a novel dual-stage attention mechanism based recurrent neural network. J. Energy Storage 2023, 72, 109297. [Google Scholar] [CrossRef]
- Yu, J. Health Degradation Detection and Monitoring of Lithium-Ion Battery Based on Adaptive Learning Method. IEEE Trans. Instrum. Meas. 2013, 63, 1709–1721. [Google Scholar] [CrossRef]
- Dubarry, M.; Liaw, B.Y. Identify capacity fading mechanism in a commercial LiFePO4 cell. J. Power Sources 2009, 194, 541–549. [Google Scholar] [CrossRef]
- Attia, P.M.; Bills, A.; Planella, F.B.; Dechent, P.; dos Reis, G.; Dubarry, M.; Gasper, P.; Gilchrist, R.; Greenbank, S.; Howey, D.; et al. Review—“Knees” in Lithium-Ion Battery Aging Trajectories. J. Electrochem. Soc. 2022, 169, 060517. [Google Scholar] [CrossRef]
- Hasan, M.N.; Qin, S. Degradation Curve Prediction of Lithium-Ion Batteries Based on Knee Point Detection Algorithm and Convolutional Neural Network. IEEE Trans. Instrum. Meas. 2022, 71, 3514810. [Google Scholar] [CrossRef]
- Baptista, M.L.; Henriques, E.M.; Goebel, K. More effective prognostics with elbow point detection and deep learning. Mech. Syst. Signal Process. 2020, 146, 106987. [Google Scholar] [CrossRef]
- Greenbank, S.; Howey, D. Automated Feature Extraction and Selection for Data-Driven Models of Rapid Battery Capacity Fade and End of Life. IEEE Trans. Ind. Inform. 2021, 18, 2965–2973. [Google Scholar] [CrossRef]
- Fermín-Cueto, P.; McTurk, E.; Allerhand, M.; Medina-Lopez, E.; Anjos, M.F.; Sylvester, J.; dos Reis, G. Identification and machine learning prediction of knee-point and knee-onset in capacity degradation curves of lithium-ion cells. Energy AI 2020, 1, 100006. [Google Scholar] [CrossRef]
- Diao, W.; Saxena, S.; Han, B.; Pecht, M. Algorithm to Determine the Knee Point on Capacity Fade Curves of Lithium-Ion Cells. Energies 2019, 12, 2910. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, Y.; Gao, Y.; Wang, F.; Mu, B.; Zhang, W. Accelerated fading recognition for lithium-ion batteries with Nickel-Cobalt-Manganese cathode using quantile regression method. Appl. Energy 2019, 256, 113841. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation (Version 1). arXiv 2015. [Google Scholar] [CrossRef]
- Oktay, O.; Schlemper, J.; Folgoc, L.L.; Lee, M.; Heinrich, M.; Misawa, K.; Mori, K.; McDonagh, S.; Hammerla, N.Y.; Kainz, B.; et al. Attention U-Net: Learning Where to Look for the Pancreas (Version 3). arXiv 2018. [Google Scholar] [CrossRef]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. UNet++: A Nested U-Net Architecture for Medical Image Segmentation (Version 1). arXiv 2018. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module (Version 2). arXiv 2018. [Google Scholar] [CrossRef]
- Wang, F.; Zhai, Z.; Liu, B.; Zheng, S.; Zhao, Z.; Chen, X. Open access dataset, code library and benchmarking deep learning approaches for state-of-health estimation of lithium-ion batteries. J. Energy Storage 2024, 77, 109884. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Cho, K.; van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations Using RNN Encoder-Decoder for Statistical Machine Translation. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP), Doha, Qatar, 25–29 October 2014; pp. 1724–1734. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Internal Representations by Error Propagation; Technical Report; California Univ San Diego La Jolla Inst for Cognitive Science: La Jolla, CA, USA, 1985. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery ID | Multi-Stage (Cycle) | ||
|---|---|---|---|
| 1 | 1~28 | 29~236 | 237~389 |
| 2 | 1~26 | 27~229 | 230~406 |
| 3 | 1~26 | 27~221 | 222~392 |
| 4 | 1~27 | 28~230 | 231~395 |
| 5 | 1~24 | 25~234 | 235~402 |
| 6 | 1~28 | 29~245 | 246~407 |
| 7 | 1~19 | 20~233 | 234~401 |
| 8 | 1~28 | 29~278 | 279~419 |
| LSTM | ||||
|---|---|---|---|---|
| Multi-Stage | Non-Stage | |||
| MAE (%) | RMSE (%) | MAE (%) | RMSE (%) | |
| Batch1 | 1.93 | 2.68 | 2.01 | 2.79 |
| Batch2 | 1.49 | 1.82 | 1.55 | 1.92 |
| Batch3 | 1.75 | 2.55 | 2.48 | 3.25 |
| U-Net | ||||
|---|---|---|---|---|
| Multi-Stage | Non-Stage | |||
| MAE (%) | RMSE (%) | MAE (%) | RMSE (%) | |
| Batch1 | 1.14 | 1.65 | 1.46 | 1.67 |
| Batch2 | 1.27 | 1.85 | 1.28 | 1.62 |
| Batch3 | 0.81 | 1.21 | 1.48 | 1.71 |
| Mixed Attention U-Net | ||||
|---|---|---|---|---|
| Multi-Stage | Non-Stage | |||
| MAE (%) | RMSE (%) | MAE (%) | RMSE (%) | |
| Batch1 | 1.02 | 1.40 | 1.28 | 1.5 |
| Batch2 | 1.04 | 1.50 | 1.16 | 1.42 |
| Batch3 | 0.66 | 1.04 | 0.86 | 1.08 |
| Type | Method | Source Battery | RMSE (%) | MAE (%) |
|---|---|---|---|---|
| Non-stage | LSTM | Batch 1 | 2.79 | 2.01 |
| Batch 2 | 1.92 | 1.55 | ||
| Batch 3 | 3.25 | 2.48 | ||
| GRU | Batch 1 | 2.78 | 2.13 | |
| Batch 2 | 2.19 | 1.79 | ||
| Batch 3 | 3.61 | 2.89 | ||
| U-Net | Batch 1 | 1.67 | 1.46 | |
| Batch 2 | 1.62 | 1.28 | ||
| Batch 3 | 1.71 | 1.48 | ||
| MLP | Batch 1 | 1.76 | 1.49 | |
| Batch 2 | 1.58 | 1.24 | ||
| Batch 3 | 1.52 | 1.32 | ||
| Mixed Attention U-Net | Batch 1 | 1.50 | 1.28 | |
| Batch 2 | 1.42 | 1.16 | ||
| Batch 3 | 1.08 | 0.86 | ||
| Multi-stage | Mixed Attention U-Net | Batch 1 | 1.40 | 1.02 |
| Batch 2 | 1.50 | 1.04 | ||
| Batch 3 | 1.04 | 0.66 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, X.; Yang, X.; Hou, F. Integrated Mixed Attention U-Net Mechanisms with Multi-Stage Division Strategy Customized for Accurate Estimation of Lithium-Ion Battery State of Health. Electronics 2024, 13, 3244. https://doi.org/10.3390/electronics13163244
Fan X, Yang X, Hou F. Integrated Mixed Attention U-Net Mechanisms with Multi-Stage Division Strategy Customized for Accurate Estimation of Lithium-Ion Battery State of Health. Electronics. 2024; 13(16):3244. https://doi.org/10.3390/electronics13163244
Chicago/Turabian StyleFan, Xinyu, Xuxu Yang, and Feifei Hou. 2024. "Integrated Mixed Attention U-Net Mechanisms with Multi-Stage Division Strategy Customized for Accurate Estimation of Lithium-Ion Battery State of Health" Electronics 13, no. 16: 3244. https://doi.org/10.3390/electronics13163244
APA StyleFan, X., Yang, X., & Hou, F. (2024). Integrated Mixed Attention U-Net Mechanisms with Multi-Stage Division Strategy Customized for Accurate Estimation of Lithium-Ion Battery State of Health. Electronics, 13(16), 3244. https://doi.org/10.3390/electronics13163244