
Transient Synchronous Stability Modeling and Comparative Analysis of Grid-Following and Grid-Forming New Energy Power Sources

Abstract
:1. Introduction
2. Modeling of New Energy Power Sources
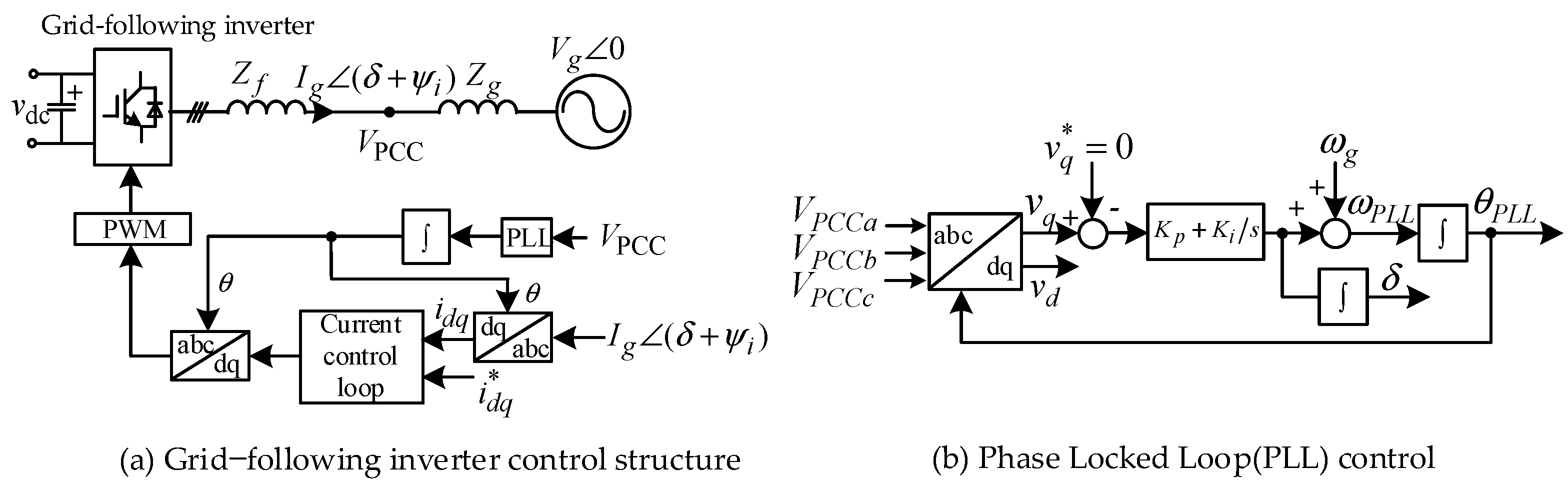
2.1. Grid-Following New Energy Power Sources
2.2. Grid-Forming New Energy Power Sources
3. Model Comparison of Synchronous Generator and New Energy Power Source
4. The Impact of Synchronization Loop Control Parameters on Stability
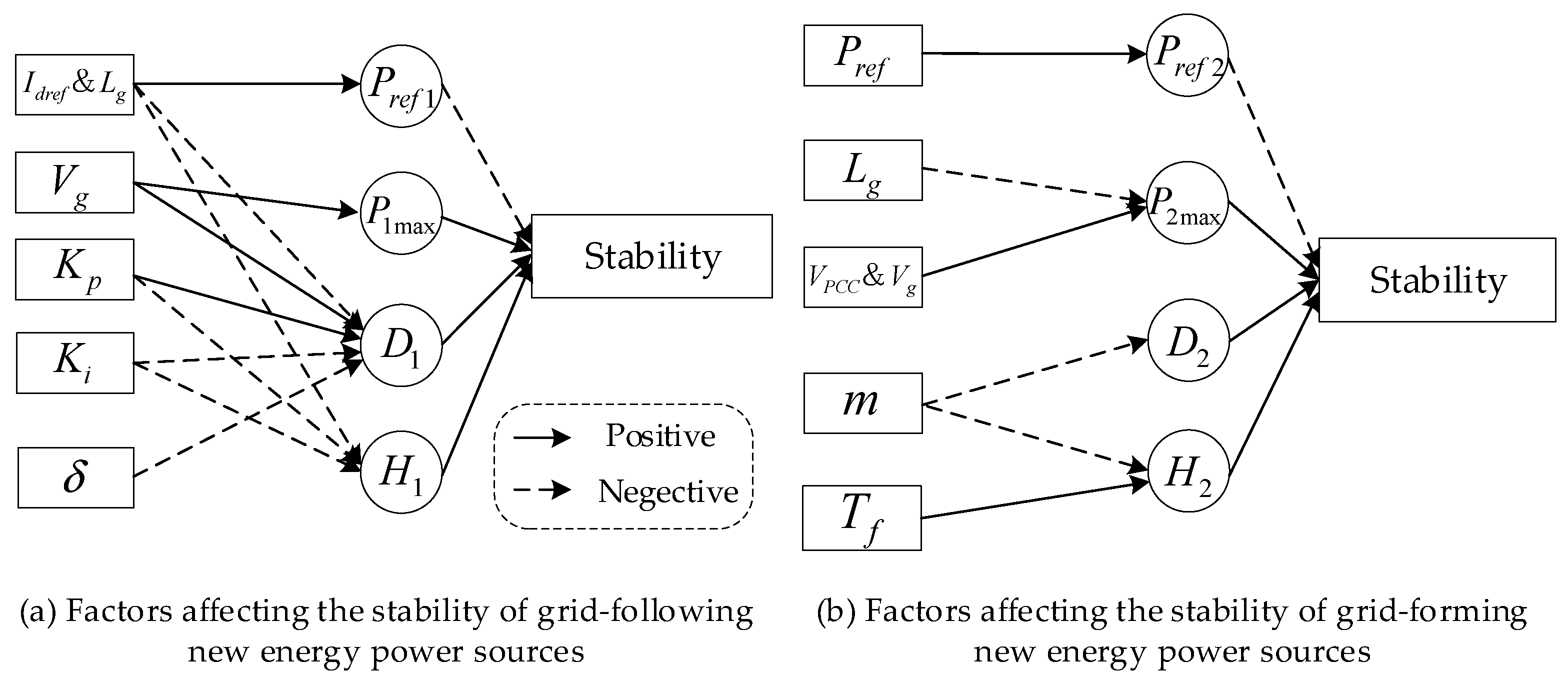
4.1. Key Factors Affecting the Stability of Grid-Following New Energy Power Supplies
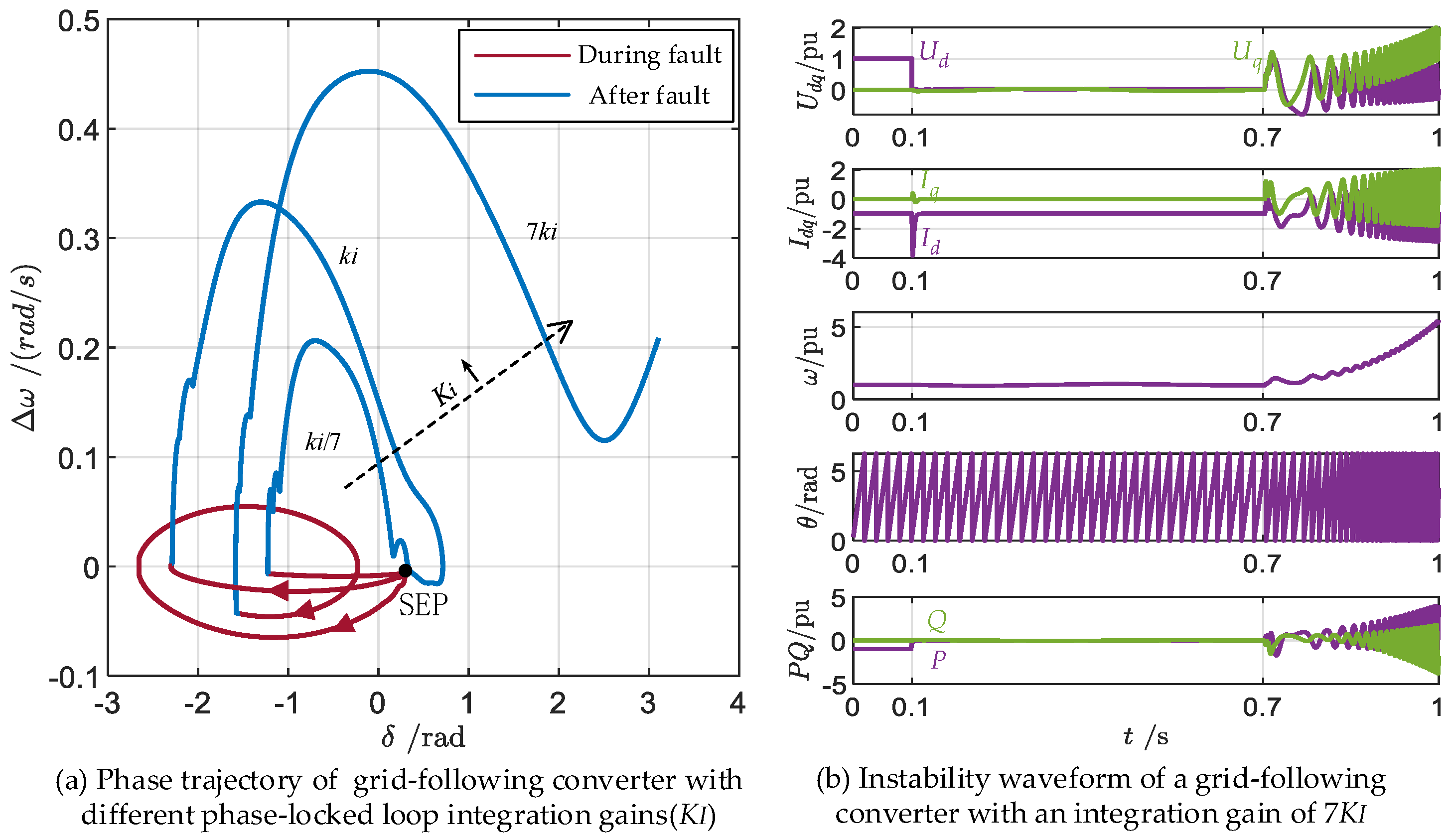
4.1.1. The Effect of Integral Gain (KI) in PLL
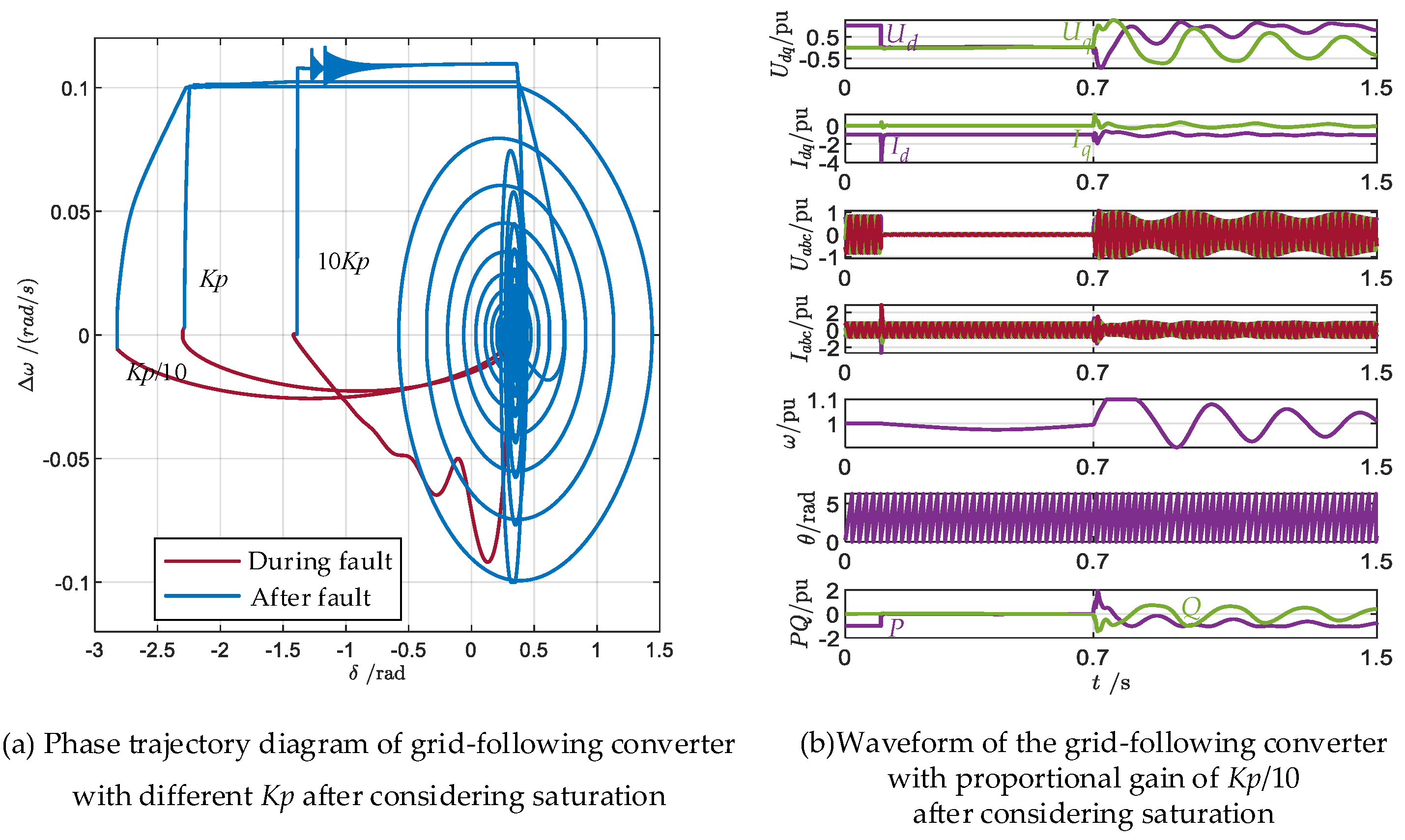
4.1.2. The Effect of Proportional Gain (KP) in PLL
4.2. Key Factors Affecting the Stability of Grid-Forming New Energy Power Supplies
5. Stability Factors of Renewable Energy Sources under the Limitation Effect
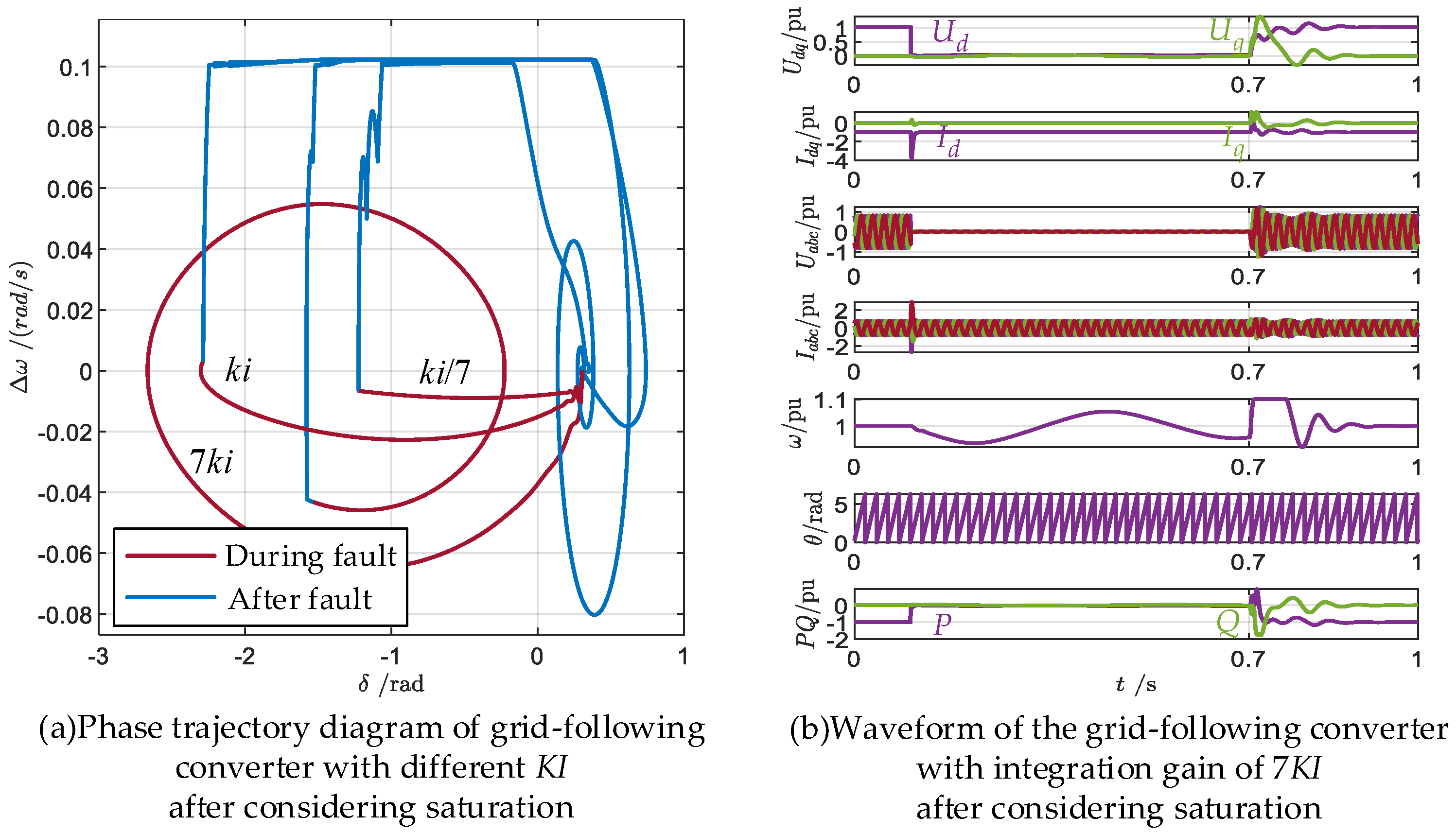
5.1. The Stability of Renewable Energy Sources Connected to the Grid under the Limitation Effect
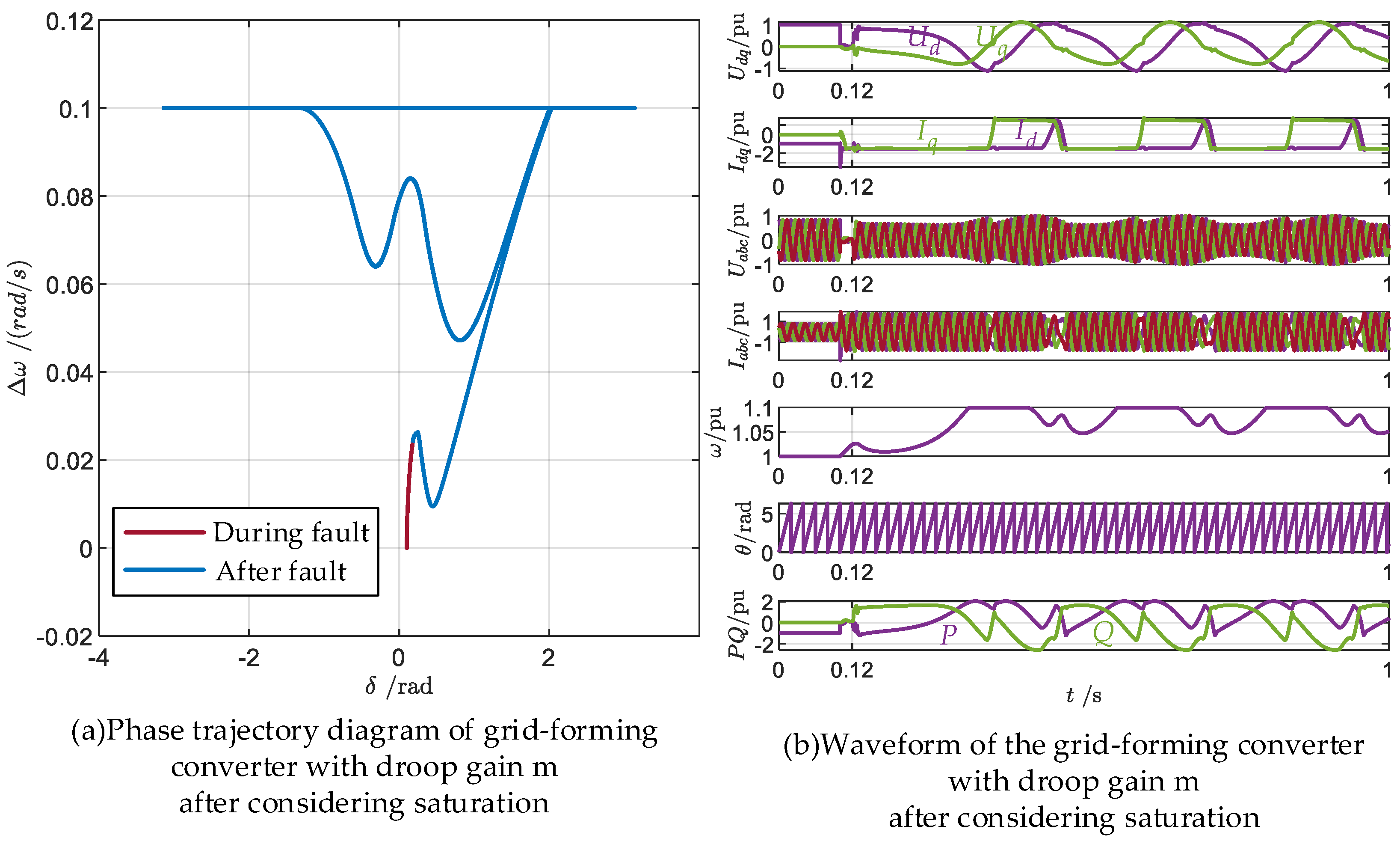
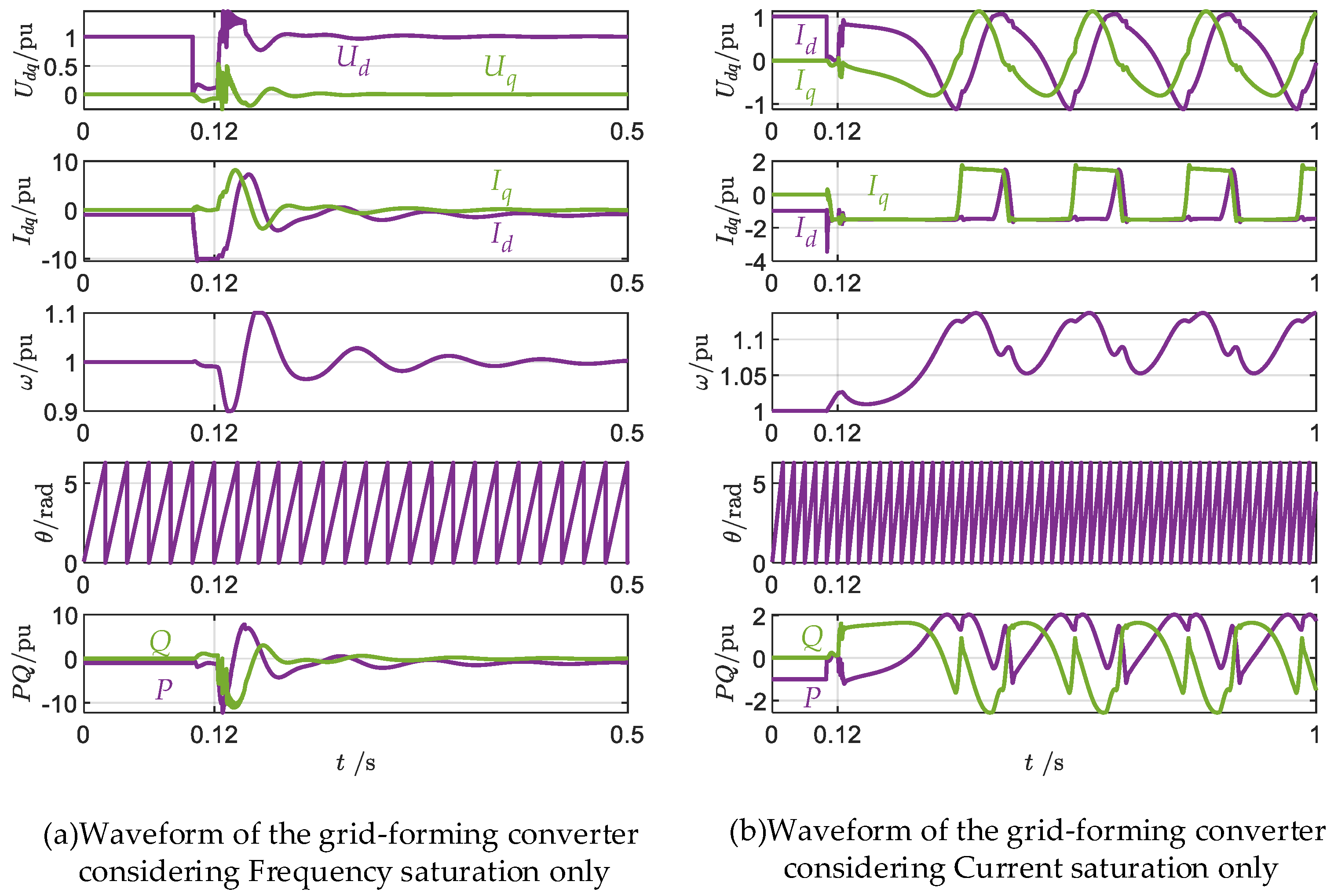
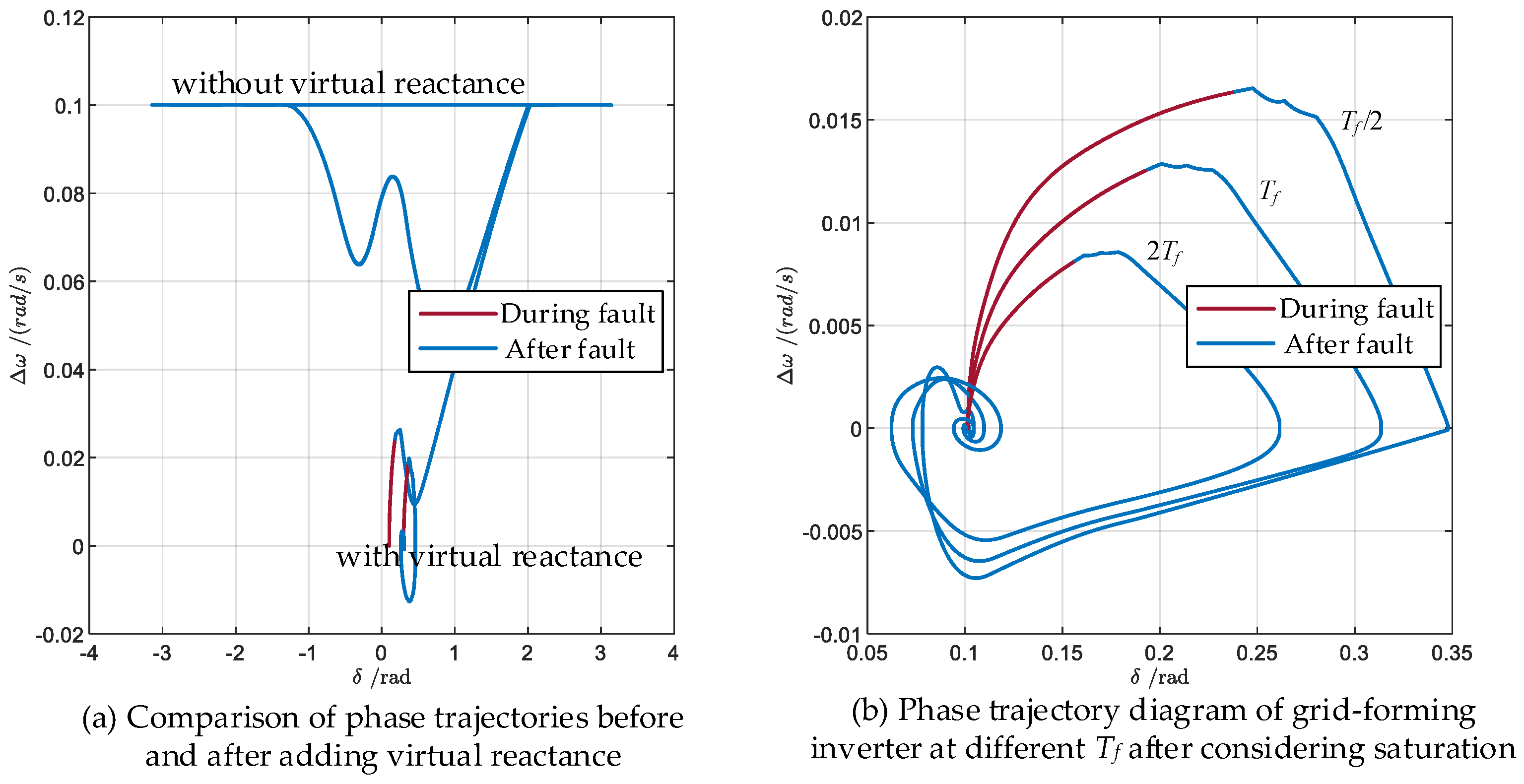
5.2. Stability of Grid-Forming Renewable Energy Power Sources under the Action of Limitation Elements
- (1)
- Different limitation conditions
- (2)
- Grid-side virtual reactance of the inverter
- (3)
- The time constant, Tf, of the low-pass filter
5.3. Comparison and Summary of Characteristics of Grid-Following and Grid-Forming New Energy Sources
6. Conclusions and Prospects
6.1. Conclusions
6.2. Prospects
- (1)
- The research primarily focused on the impact of internal synchronization loops of new energy sources on their stability. However, new energy sources involve numerous control loops, and the coupling effects among these control loops are likely to influence synchronization stability.
- (2)
- The study only reflected trends of certain influencing factors on system synchronization stability and did not quantitatively measure the magnitude of these effects.
- (3)
- The investigation was confined to the transient synchronization stability of individual new energy sources integrated into the grid. However, with the increasing proportions of new energy sources, power electronic devices, and advancements in new power system configurations, the transient instability phenomena faced by future systems will become more complex.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Values | System Parameters | Values |
|---|---|---|---|
| Base frequency/Hz | 50 | Line inductance/pu | 0.3 |
| Base power/VA | 1 | Output active power/pu | 1 |
| Base voltage/V | 1 | Current loop proportional gain | 0.25 |
| Filter resistance/pu | 0.001 | Current loop integral gain | 98.17 |
| Filter reactance/pu | 0.05 | PLL proportional gain | 62.83 |
| Line resistance/pu | 0.06 | PLL integral gain | 986.96 |
| System Parameters | Values | System Parameters | Values |
|---|---|---|---|
| Base frequency/Hz | 50 | Power calculation Filter bandwidth/Hz | 5 |
| Base power/VA | 1 | Droop gain | 0.05 |
| Base voltage/V | 1 | Voltage loop integration gain | 282.743 |
| Source-side filter resistance/pu | 0.01 | Voltage loop proportional gain | 0.012 |
| Source-side filter reactance/pu | 0.05 | Current loop proportional gain | 565.487 |
| Filter capacitance/pu | 0.02 | Current loop integral gain | 0.6 |
| Grid-side filter reactance/pu | 0.01 | Output active power/pu | 565.487 |
| Grid-side filter resistance/pu | 0.002 | Line inductance/pu | 0.1 |
| Line resistance/pu | 0.02 |
References
- Bai, J.; Xin, S.; Liu, J.; Zheng, K. Roadmap of Realizing the High Penetration Renewable Energy in China. Proc. CSEE 2015, 35, 3699–3705. [Google Scholar] [CrossRef]
- Xie, X.; He, J.; Mao, H.; Li, H. New Issues and Classification of Power System Stability with High Shares of Renewables and Power Electronics. Proc. CSEE 2021, 41, 461–475. [Google Scholar] [CrossRef]
- Zheng, X. Three Technical Challenges Faced by Power Grids with High Proportion of Non-Synchronous Machine Sources. South. Power Syst. Technol. 2020, 14, 1–9. [Google Scholar] [CrossRef]
- Lew, D.; Bartlett, D.; Groom, A.; Jorgensen, P.; O’Sullivan, J.; Quint, R.; Rew, B.; Rockwell, B.; Sharma, S.; Stenclik, D. Secrets of Successful Integration: Operating Experience with High Levels of Variable, Inverter-Based Generation. IEEE Power Energy Mag. 2019, 17, 24–34. [Google Scholar] [CrossRef]
- Wang, X.; Taul, M.G.; Wu, H.; Liao, Y.; Blaabjerg, F.; Harnefors, L. Grid-Synchronization Stability of Converter-Based Resources—An Overview. IEEE Open J. Ind. Appl. 2020, 1, 115–134. [Google Scholar] [CrossRef]
- Rosso, R.; Wang, X.; Liserre, M.; Lu, X.; Engelken, S. Grid-Forming Converters: Control Approaches, Grid-Synchronization, and Future Trends—A Review. IEEE Open J. Ind. Appl. 2021, 2, 93–109. [Google Scholar] [CrossRef]
- Chi, Y.N.; Jiang, B.W.; Hu, J.B.; Lin, W.F.; Liu, H.Z.; Fan, Y.W.; Ma, S.C.; Yao, J. Grid-forming Converters: Physical Mechanism and Characteristics. High Volt. Eng. 2024, 50, 590–604. [Google Scholar] [CrossRef]
- Du, W.; Tuffner, F.K.; Schneider, K.P.; Lasseter, R.H.; Xie, J.; Chen, Z.; Bhattarai, B. Modeling of Grid-Forming and Grid-Following Inverters for Dynamic Simulation of Large-Scale Distribution Systems. IEEE Trans. Power Deliv. 2021, 36, 2035–2045. [Google Scholar] [CrossRef]
- Li, M.; Zhang, X.; Guo, Z.; Pan, H.; Ma, M.; Zhao, W. Impedance Adaptive Dual-Mode Control of Grid-Connected Inverters with Large Fluctuation of SCR and Its Stability Analysis Based on D-Partition Method. IEEE Trans. Power Electron. 2021, 36, 14420–14435. [Google Scholar] [CrossRef]
- Kez, D.A.; Foley, A.M.; Morrow, D.J. Analysis of Fast Frequency Response Allocations in Power Systems with High System Non-Synchronous Penetrations. IEEE Trans. Ind. Appl. 2022, 58, 3087–3101. [Google Scholar] [CrossRef]
- Taul, M.G.; Wang, X.; Davari, P.; Blaabjerg, F. An Overview of Assessment Methods for Synchronization Stability of Grid-Connected Converters Under Severe Symmetrical Grid Faults. IEEE Trans. Power Electron. 2019, 34, 9655–9670. [Google Scholar] [CrossRef]
- Li, Y.; Gu, Y.; Green, T.C. Revisiting Grid-Forming and Grid-Following Inverters: A Duality Theory. IEEE Trans. Power Syst. 2022, 37, 4541–4554. [Google Scholar] [CrossRef]
- Liu, Z.X.; Qin, L.; Yang, S.Q.; Zhou, Y.Y.; Wang, Q.; Zheng, J.W.; Liu, K.P. Review on Virtual Synchronous Generator Control Technology of PowerElectronic Converter in Power System Based on New Energy. Power Syst. Technol. 2023, 47, 1–16. [Google Scholar] [CrossRef]
- Tan, S.; Geng, H.; Yang, G. Phillips-Heffron model for current-controlled power electronic generation unit. J. Mod. Power Syst. Clean Energy 2017, 6, 582–594. [Google Scholar] [CrossRef]
- Zheng, X. Physical mechanism and research approach of generalized synchronous stability for power systems. Electr. Power Autom. Equip. 2020, 40, 3–9. [Google Scholar] [CrossRef]
- Haoyue, G.; Qiang, G.; Jianbo, G.; Qinyong, Z.; Jian, Z.; Libo, Z.; Lei, G. Small Disturbance Stability Analysis and Control Research Based on State Space Method of Converter System. Proc. CSEE 2024, 1–16. [Google Scholar]
- Yan, W.B.; Huang, Y.H.; Fang, Z.; Wang, D.; Tang, J.R.; Zhou, K.L. Stability Mechanism Analysis of Grid-forming Converter Connected to Low Impedance Grid. High Volt. Eng. 2024, 1–12. [Google Scholar] [CrossRef]
- Wang, X.; Harnefors, L.; Blaabjerg, F. Unified Impedance Model of Grid-Connected Voltage-Source Converters. IEEE Trans. Power Electron. 2018, 33, 1775–1787. [Google Scholar] [CrossRef]
- Huang, L.L.; Xin, H.H.; Ju, P.; Hu, J.B. Synchronization stability analysis and unified synchronization control structure of grid-connected power electronic devices. Electr. Power Autom. Equip. 2020, 40, 10–25. [Google Scholar] [CrossRef]
- Zou, Z.Y.; Wu, C.; Wang, Y.; Tian, J.; Zhan, C.J. Transient Stability Analysis of Islanded System with Parallel Grid-forming Converters Based on Equivalent Synchronous Power. Autom. Electr. Power Syst. 2024, 48, 140–150. [Google Scholar]
- Zhang, L.Q.; Liu, Y.; Xin, H. Phase-plane analyses of a microgrid under PQ control mode. In Proceedings of the International Conference on Sustainable Power Generation and Supply (SUPERGEN 2012), Hangzhou, China, 8–9 September 2012. [Google Scholar]
- Shuai, Z.; Shen, C.; Liu, X.; Li, Z.; Shen, Z.J. Transient Angle Stability of Virtual Synchronous Generators Using Lyapunov’s Direct Method. IEEE Trans. Smart Grid 2019, 10, 4648–4661. [Google Scholar] [CrossRef]
- Wu, H.; Wang, X. Design-Oriented Transient Stability Analysis of PLL-Synchronized Voltage-Source Converters. IEEE Trans. Power Electron. 2020, 35, 3573–3589. [Google Scholar] [CrossRef]
- Hu, Q.; Fu, L.; Ma, F.; Ji, F. Large Signal Synchronizing Instability of PLL-Based VSC Connected to Weak AC Grid. IEEE Trans. Power Syst. 2019, 34, 3220–3229. [Google Scholar] [CrossRef]
- Chen, J.; Liu, M.; O’Donnell, T.; Milano, F. Impact of Current Transients on the Synchronization Stability Assessment of Grid-Feeding Converters. IEEE Trans. Power Syst. 2020, 35, 4131–4134. [Google Scholar] [CrossRef]
- Cecati, C.; Latafat, H. Time domain approach compared with direct method of Lyapunov for transient stability analysis of controlled power system. In Proceedings of the International Symposium on Power Electronics, Sorrento, Italy, 20–22 June 2012. [Google Scholar]
- Yuan, X.M.; Zhang, M.Q.; Chi, Y.N.; Ju, P. Basic Challenges of and Technical Roadmap to Power-electronized Power System Dynamics Issues. Proc. CSEE 2022, 42, 1904–1917. [Google Scholar] [CrossRef]
- Li, Y. Modeling and Control of Power Electronic Converter. Ph.D. Thesis, Imperial College London, London, UK, 2020. [Google Scholar]
- Yan, P.L.; Ge, X.L.; Wang, H.M.; Sun, W.X.; Zhu, Y.L. PLL Parameter Optimization Design for Renewable Energy Grid-connected Inverters in Weak Grid. Power Syst. Technol. 2022, 46, 2210–2221. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.B.; Yang, D.S.; Chen, X.R.; Zhong, Q.C.; Lv, Z.P. Modeling of the Power Loop and Parameter Design of Virtual Synchronous Generators. Proc. CSEE 2015, 35, 6508–6518. [Google Scholar] [CrossRef]




| PLL Grid-Following Converter | Frequency Droop Grid-Forming Converter | ||
|---|---|---|---|
| Synchronization method | Vq-PLL by phase-locked loop | P- droop control | |
| External characteristics | Current source (grid voltage-following, current-forming) | Voltage source (grid current-following, voltage-forming) | |
| Influencing Factors | Synchronization loop control Parameters | Increasing KIPLL tends to make the system unstable. Increasing KpPLL increases system damping and reduces inertia, impacting system stability in a nonlinear relationship. | Increasing m leads the system toward instability. Increasing Tf leads the system toward stability. |
| Grid strength | Stable when the grid is strong. | Stable when the grid is weak. | |
| Current and frequency limitations | Current limitation has little impact on stability. Frequency limition makes the system more stable. | Current limition reduces the stability region of the system. Frequency limition makes the system more stable. | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, X.; Zhang, Y.; Xu, Y.; Zheng, L.; Zhang, L.; Yuan, Z. Transient Synchronous Stability Modeling and Comparative Analysis of Grid-Following and Grid-Forming New Energy Power Sources. Electronics 2024, 13, 3308. https://doi.org/10.3390/electronics13163308
Tian X, Zhang Y, Xu Y, Zheng L, Zhang L, Yuan Z. Transient Synchronous Stability Modeling and Comparative Analysis of Grid-Following and Grid-Forming New Energy Power Sources. Electronics. 2024; 13(16):3308. https://doi.org/10.3390/electronics13163308
Chicago/Turabian StyleTian, Xin, Yuyue Zhang, Yanhui Xu, Le Zheng, Lina Zhang, and Zhenhua Yuan. 2024. "Transient Synchronous Stability Modeling and Comparative Analysis of Grid-Following and Grid-Forming New Energy Power Sources" Electronics 13, no. 16: 3308. https://doi.org/10.3390/electronics13163308