



Frequency Support Coordinated Control Strategy of Renewable Distributed Energy Resource Based on Digital Twins

Abstract
:1. Introduction
2. Coordinated Control Method for Renewable Energy Generation
2.1. Topology of Inverter-Based Renewable Energy Sources
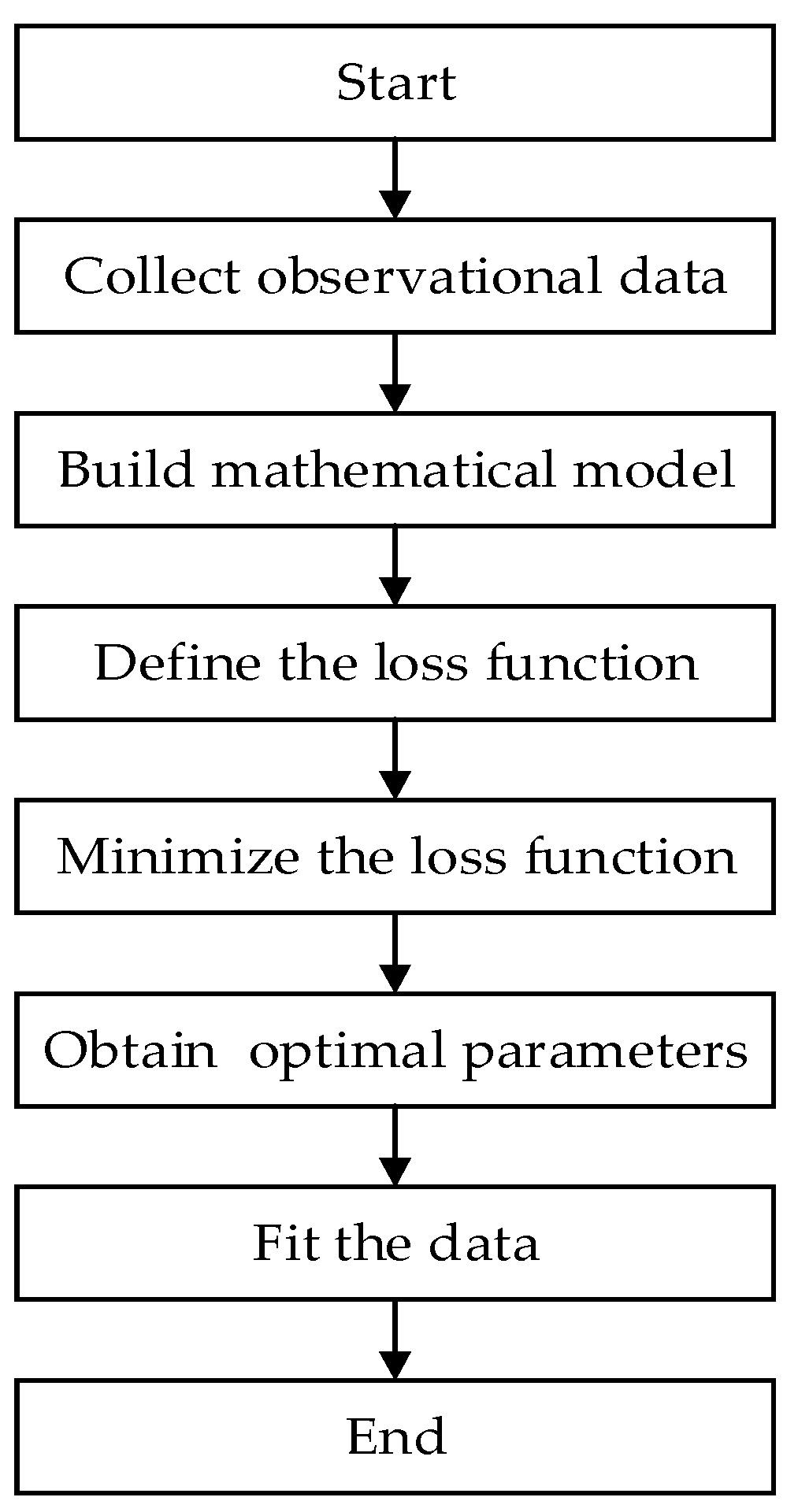
2.2. Least Squares Approximation
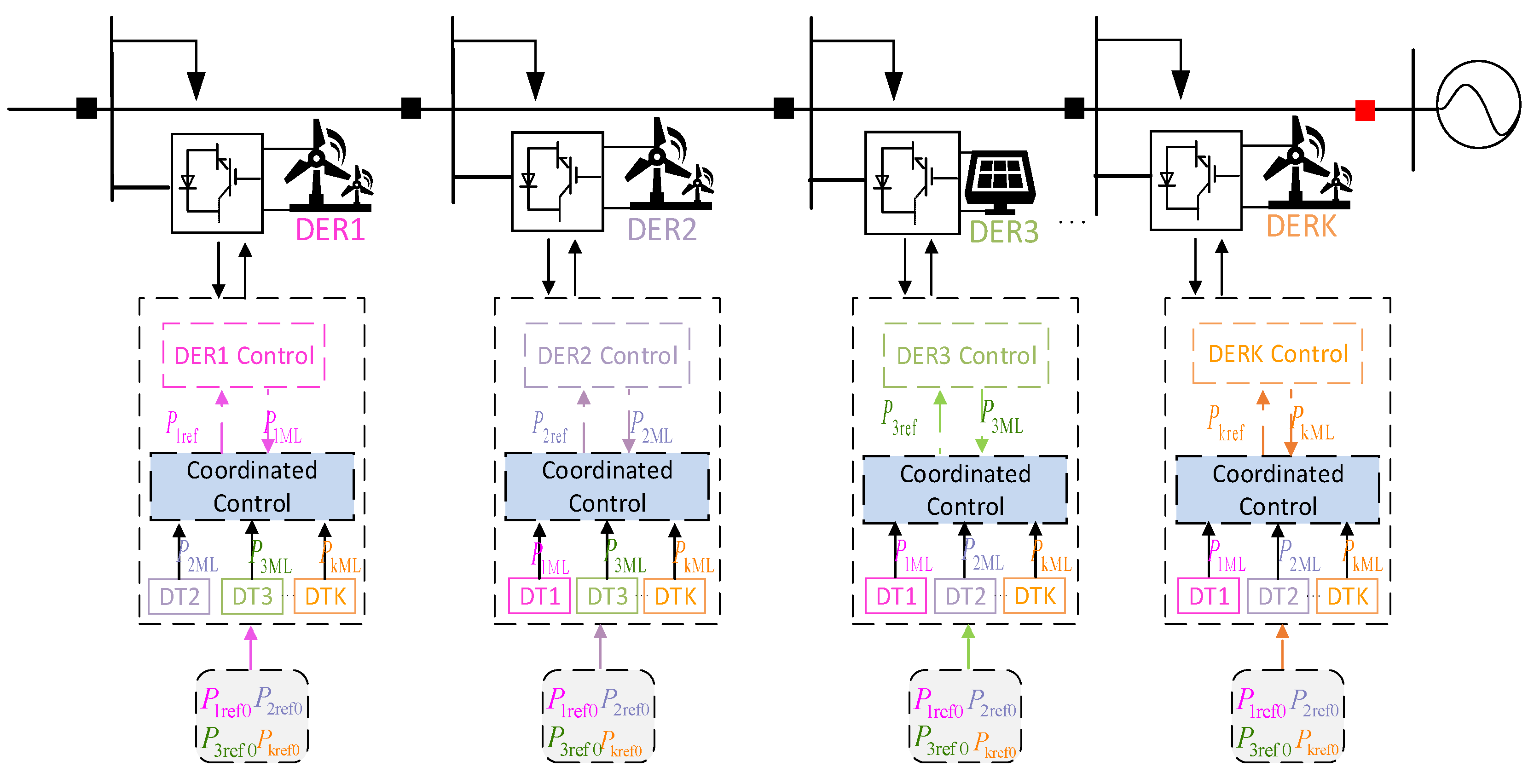
2.3. Distributed Coordinated Control Method
3. Coordinated Control of DERs Based on Digital Twins
3.1. Distributed Coordinated Control Based on Digital Twins
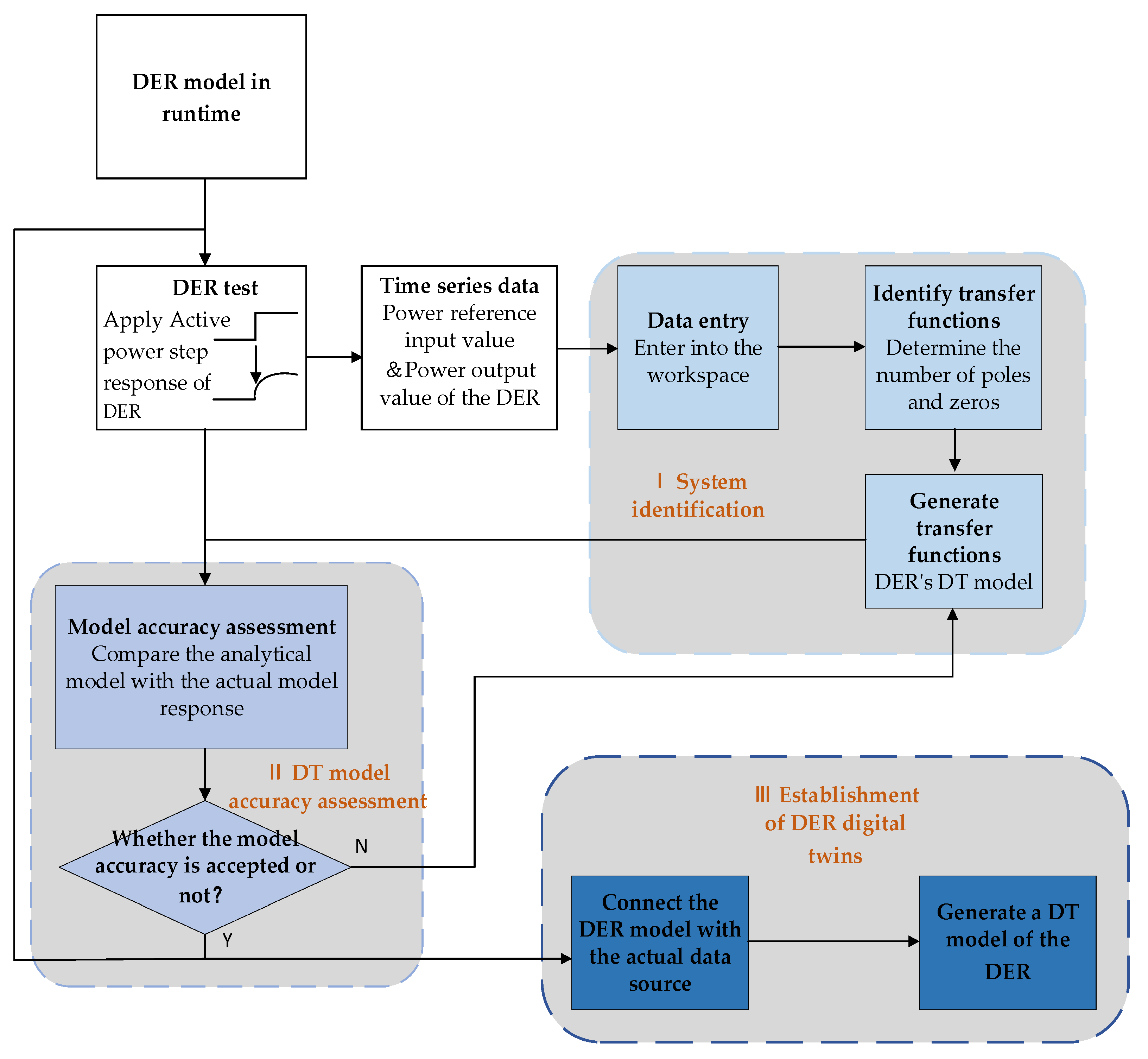
3.2. Digital Twin Modeling of DERs
4. Simulation and Case Study
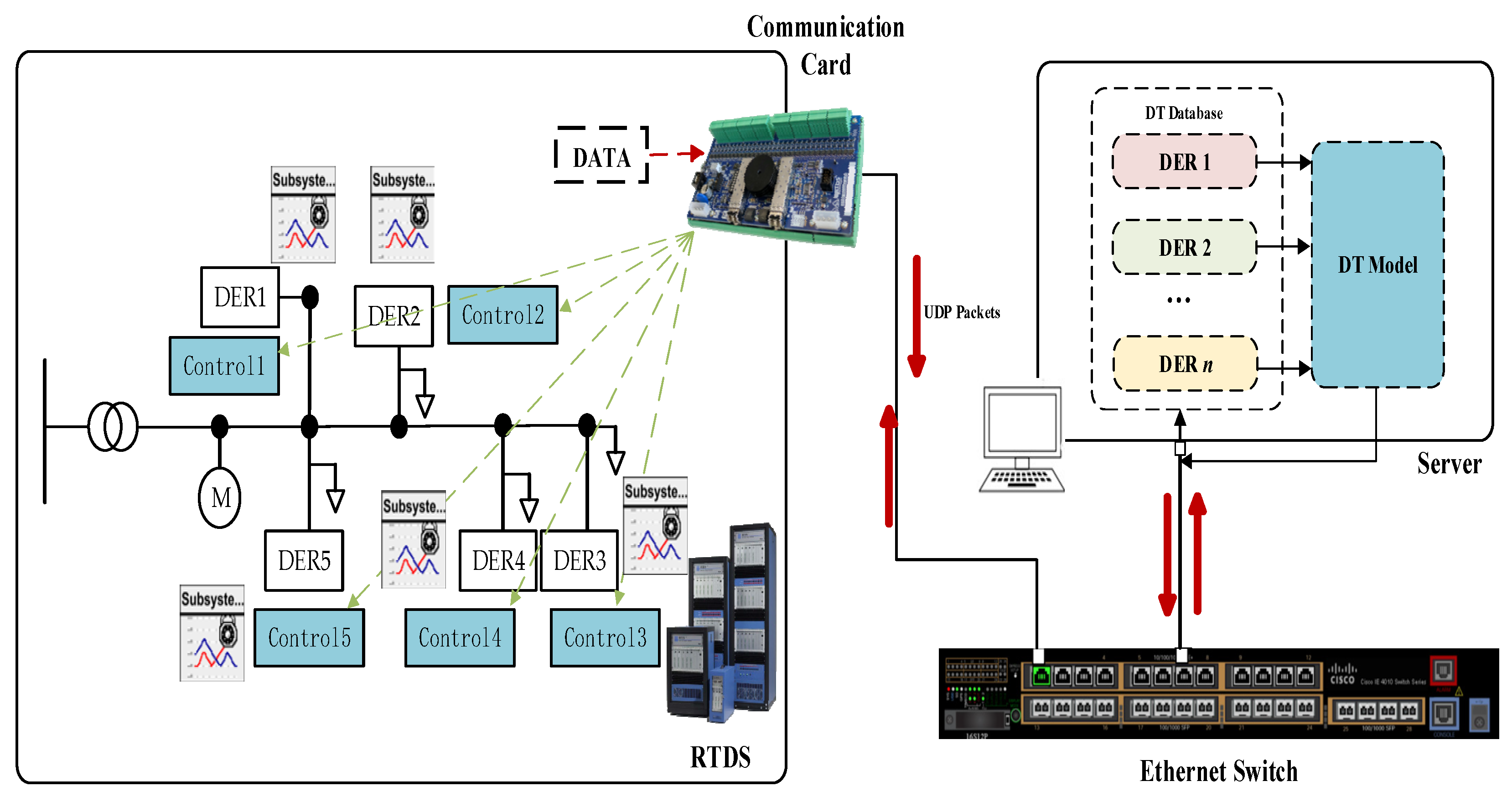
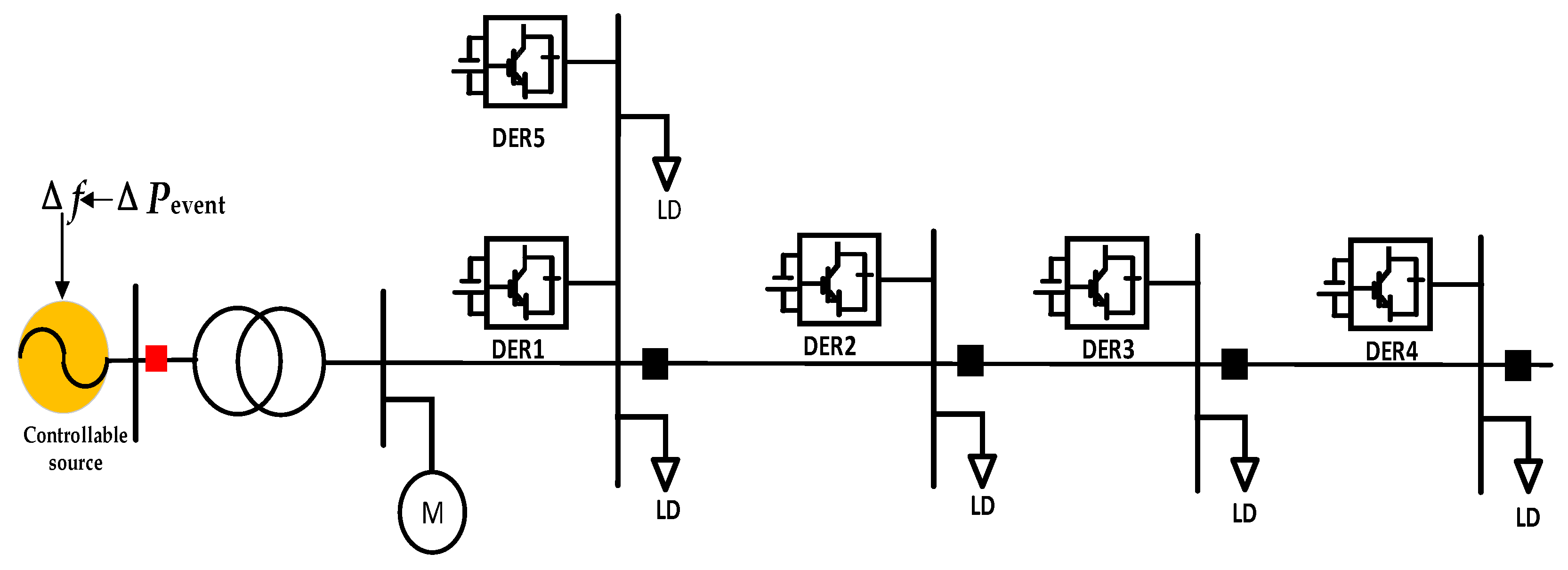
4.1. Digital Twin Testing Platforms
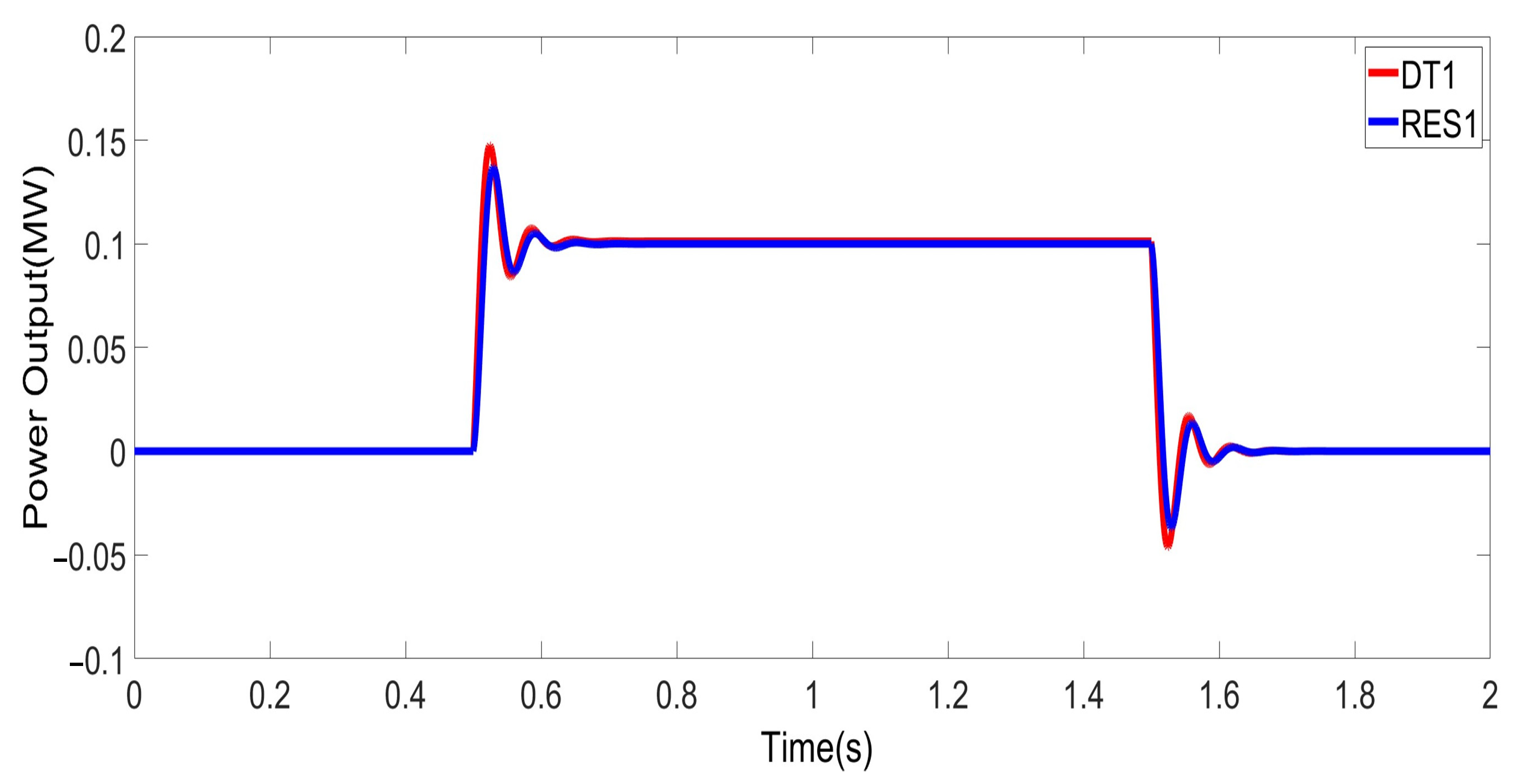
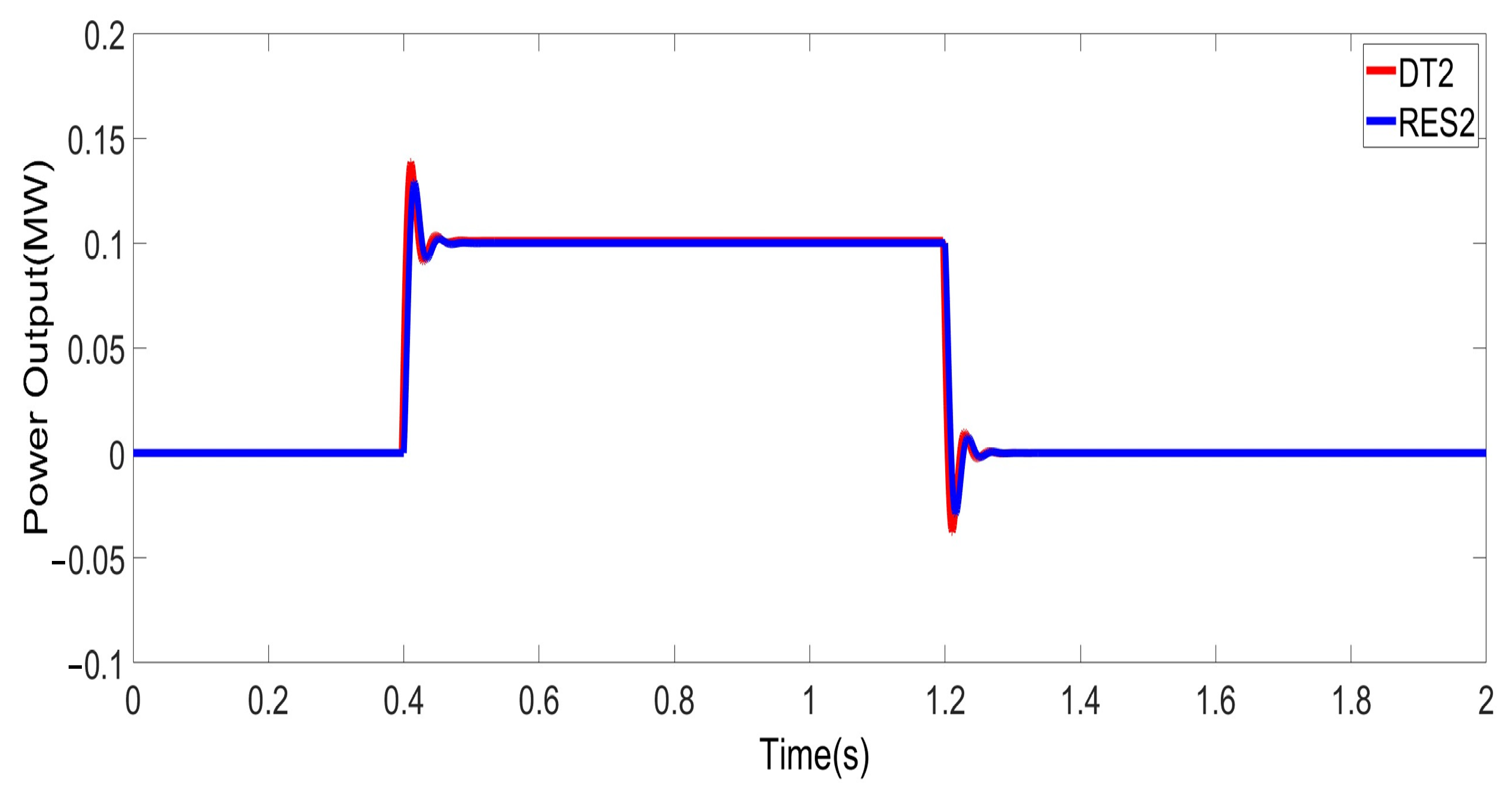
4.2. Accuracy Testing of Digital Twin Models
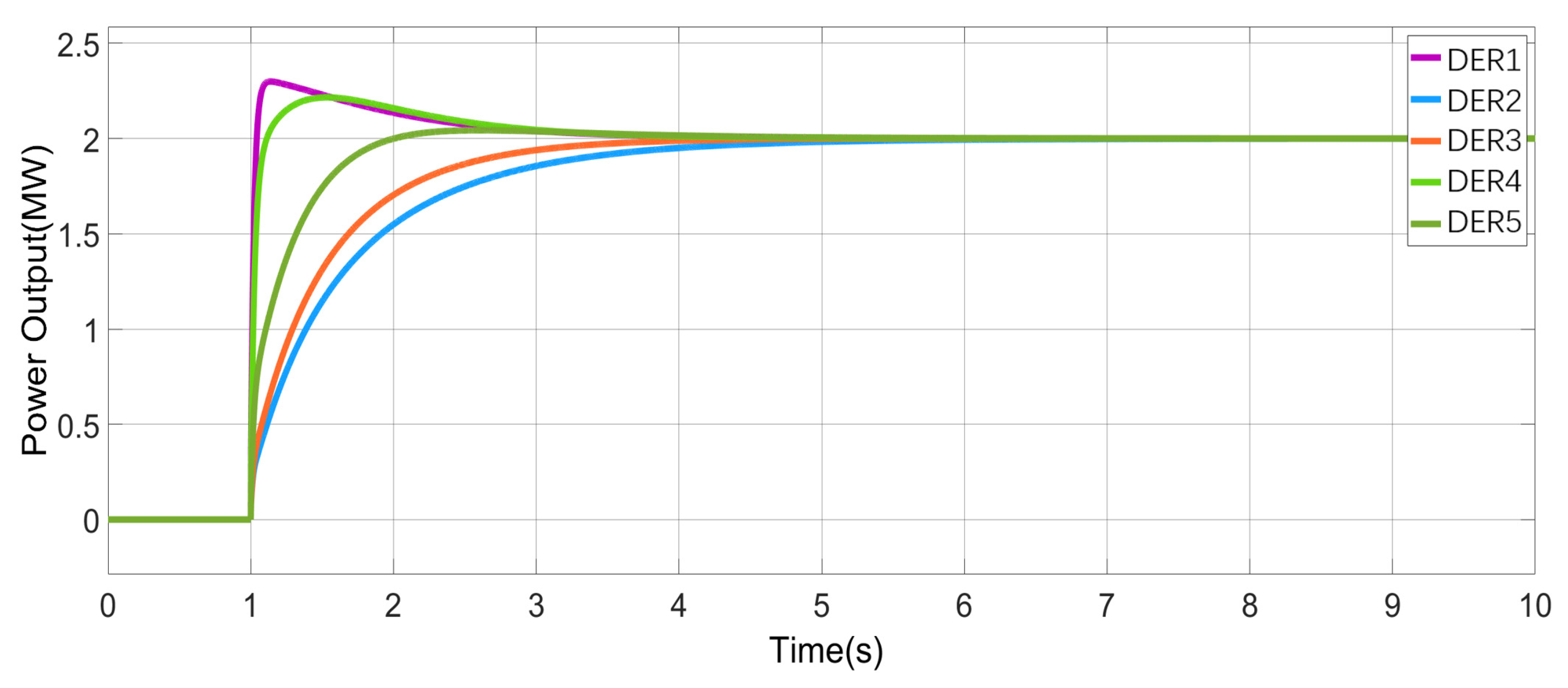
4.3. Verification of Frequency Support Effectiveness
4.4. Technical Benefits
5. Conclusions
- A coordination control strategy for renewable DERs has been proposed, improving the output characteristics and addressing the shortcomings of differing and unexpected outputs, achieving optimized active power output.
- For conventional centralized and distributed coordination control methods, due to the drawbacks of centralized control, such as a large system computational load and poor safety due to centralized control, a distributed method for coordination control is proposed, offering better fault tolerance for the system.
- Digital twin technology is used to reduce the high real-time communication requirements of coordination control, reducing the communication channels for distributed coordination control from the original K2 to K and significantly decreasing communication demands.
- The distributed renewable energy coordination control strategy based on digital twin technology is compared with the scenarios of renewable DERs without support and with support but without coordinated control, fully demonstrating the effectiveness of the proposed method for grid frequency control.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jafari, M.; Korpås, M.; Botterud, A. Power System Decarbonization: Impacts of Energy Storage Duration and Interannual Renewables Variability. Renew. Energy 2020, 156, 1171–1185. [Google Scholar] [CrossRef]
- Zhao, Y.; Xia, S.; Zhang, J.; Hu, Y.; Wu, M. Effect of the Digital Transformation of Power System on Renewable Energy Utilization in China. IEEE Access 2021, 9, 96201–96209. [Google Scholar] [CrossRef]
- Fulli, G.; Masera, M.; Spisto, A.; Vitiello, S. A Change Is Coming: How Regulation and Innovation Are Reshaping the European Union’s Electricity Markets. IEEE Power Energy Mag. 2019, 17, 53–66. [Google Scholar] [CrossRef]
- Thompson, M.; Stark, C. Climate Change Committee. Net Zero–Technical Report; Climate Change Committee: London, UK, 2019. [Google Scholar]
- Stark, C.; Thompson, M.; Andrew, T.; Beasley, G.; Bellamy, O.; Budden, P.; Cole, C.; Darke, J.; Davies, E.; Feliciano, D.; et al. Net Zero: The UK’s Contribution to Stopping Global Warming; Climate Change Committee: London, UK, 2019. [Google Scholar]
- Hui, Z.; Feng, S.; Tie, L.I.; Qiang, Z.; Junci, T.; Tao, Z. Analysis of the “9·28” Blackout in South Australia and Its Enlightenment to China. Autom. Electr. Power Syst. 2017, 41, 1–6. [Google Scholar]
- Sun, H.; Xu, T.; Guo, Q.; Li, Y.; Lin, W.; Yi, J.; Li, W. Analysis on Blackout in Great Britain Power Grid on August 9th, 2019 and Its Enlightenment to Power Grid in China. Proc. CSEE 2019, 39, 6183–6192. [Google Scholar]
- Li, G.; Liu, X.; Xin, Y.; Jiang, T.; Yan, K.; Wang, T. A Review of Frequency Stability in Power Systems with High Proportion of Renewable Energy. High Volt. Technol. 2024, 3, 1165–1181. [Google Scholar]
- Wang, Z.; Zhang, X.; Yang, H.; Zhang, H. Study on Primary Frequency Control Strategies for Photovoltaic Power Plants. Power Syst. Clean Energy 2023, 39, 120–128. [Google Scholar]
- Zhong, Z.; Wen, Y.; Ye, X.; Liu, F.; Guo, W.; Zhou, S. Frequency Emergency Control Strategy for Sending-End Power Grid with High Proportion of Renewables and High Load Coordination of Multiple Resource Types. Power Syst. Technol. 2024, 12, 1355344. [Google Scholar]
- Shi, G.; Sun, R.; Xu, H.; Qiao, Y. Active Power Hierarchical Coordination Control Strategy for Large-Scale Clustered Renewable Energy. Power Syst. Technol. 2018, 42, 2160–2167. [Google Scholar]
- Zhao, C.; Wang, H.; Gu, Z.; Liu, X.; Zhu, G. Dispersed Wind-Storage System Frequency and Voltage Regulation Capability Evaluation Key Technologies. Compr. Smart Energy 2024, 46, 78–87. [Google Scholar]
- Li, J.; Wang, D.; Fan, H.; Yang, D.; Fang, R. Hierarchical Optimization Control Method for Active Distribution Networks with Mobile Energy Storage. Autom. Electr. Power Syst. 2022, 46, 189–198. [Google Scholar]
- Di Nardo, M. Developing a Conceptual Framework Model of Industry 4.0 for Industrial Management. Ind. Eng. Manage. Syst. 2020, 19, 551–560. [Google Scholar] [CrossRef]
- Bazmohammadi, N.; Madary, A.; Vasquez, J.C.; Mohammadi, H.B.; Khan, B.; Wu, Y.; Guerrero, J.M. Microgrid Digital Twins: Concepts, Applications, and Future Trends. IEEE Access 2021, 10, 2284–2302. [Google Scholar] [CrossRef]
- Hicks, B. Industry 4.0 and Digital Twins: Key Lessons from NASA. In The Future Factory Blog; The Future Factory: Barnet, UK, 2019. [Google Scholar]
- Kumar, M.; Kvamsdal, T.; Johannessen, K.A. Simple A Posteriori Error Estimators in Adaptive Isogeometric Analysis. Comput. Math. Appl. 2015, 70, 1555–1582. [Google Scholar] [CrossRef]
- Rocchetta, R.; Bellani, L.; Compare, M.; Zio, E.; Patelli, E. A Reinforcement Learning Framework for Optimal Operation and Maintenance of Power Grids. Appl. Energy 2019, 241, 291–301. [Google Scholar] [CrossRef]
- Xu, Y.; Sun, Y.; Liu, X.; Zheng, Y. A Digital-Twin-Assisted Fault Diagnosis Using Deep Transfer Learning. IEEE Access 2019, 7, 19990–19999. [Google Scholar] [CrossRef]
- Jain, P.; Poon, J.; Singh, J.P.; Spanos, C.; Sanders, S.R.; Panda, S.K. A Digital Twin Approach for Fault Diagnosis in Distributed Photovoltaic Systems. IEEE Trans. Power Electron. 2019, 35, 940–956. [Google Scholar] [CrossRef]
- Milton, M.; De lao, C.; Ginn, H.L.; Benigni, A. Controller-Embeddable Probabilistic Real-Time Digital Twins for Power Electronic Converter Diagnostics. IEEE Trans. Power Electron. 2020, 35, 9850–9864. [Google Scholar] [CrossRef]
- Zhou, M.; Yan, J.; Feng, D. Digital Twin Framework and Its Application to Power Grid Online Analysis. CSEE J. Power Energy Syst. 2019, 5, 391–398. [Google Scholar]
- Guo, X.R. Communication of Distributed Energy Distribution Automation Systems Based on IEC 61850. Electr. Times 2024, 4, 89–92. [Google Scholar]
- GB/T 19963.1-2021; Technical Specifications for Connecting Wind Farms to Power Systems—Part 1: Onshore Wind Power. Standardization Administration of China: Beijing, China, 2021.
- IEC 62116:2014; Photovoltaic (PV) Modules—Test Methods for Determining the Resistance of PV Modules to Mechanical Stress. International Electrotechnical Commission: Geneva, Switzerland, 2014.
- Barsali, S. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources; CIGRE: Paris, France, 2014. [Google Scholar]
- EN 50549-1:2019; Requirements for Generating Plants to Be Connected in Parallel with Distribution Networks—Part 1: Connection to a LV Distribution Network—Generating Plants up to and Including Type B. CENELEC: Brussels, Belgium, 2019; p. 74.
- Grid Code OC6: Requirements for Generating Plants to Be Connected to the Transmission System; National Grid: London, UK, 2023.
- Khan, M.A.U.; Hong, Q.; Dyśko, A.; Booth, C.; Wang, B.; Dong, X. Evaluation of Fault Characteristics in Microgrids Dominated by Inverter-Based Distributed Generators with Different Control Strategies. In Proceedings of the 2019 IEEE 8th International Conference on Advanced Power System Automation and Protection (APAP), Xi’an, China, 21–24 October 2019; pp. 846–849. [Google Scholar]
- GB/T 15945-2008; Electric Energy Quality—Power System Frequency Deviation. Standards Press of China: Beijing, China, 2008.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Method | Full Support Time(s) |
|---|---|
| Coordination Control Based on DT | 3.4 |
| Traditional coordinated control | 4.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, X.; Guo, X.; Wang, J.; Zhi, H.; Hao, L.; Ji, L. Frequency Support Coordinated Control Strategy of Renewable Distributed Energy Resource Based on Digital Twins. Electronics 2024, 13, 3403. https://doi.org/10.3390/electronics13173403
Chang X, Guo X, Wang J, Zhi H, Hao L, Ji L. Frequency Support Coordinated Control Strategy of Renewable Distributed Energy Resource Based on Digital Twins. Electronics. 2024; 13(17):3403. https://doi.org/10.3390/electronics13173403
Chicago/Turabian StyleChang, Xiao, Xiangyu Guo, Jinhao Wang, Huiqiang Zhi, Longfei Hao, and Liang Ji. 2024. "Frequency Support Coordinated Control Strategy of Renewable Distributed Energy Resource Based on Digital Twins" Electronics 13, no. 17: 3403. https://doi.org/10.3390/electronics13173403
APA StyleChang, X., Guo, X., Wang, J., Zhi, H., Hao, L., & Ji, L. (2024). Frequency Support Coordinated Control Strategy of Renewable Distributed Energy Resource Based on Digital Twins. Electronics, 13(17), 3403. https://doi.org/10.3390/electronics13173403