
Evaluation Approach and Controller Design Guidelines for Subsequent Commutation Failure in Hybrid Multi-Infeed HVDC System

Abstract
:1. Introduction
2. Mathematical Model of the HMIDC System
2.1. System Description
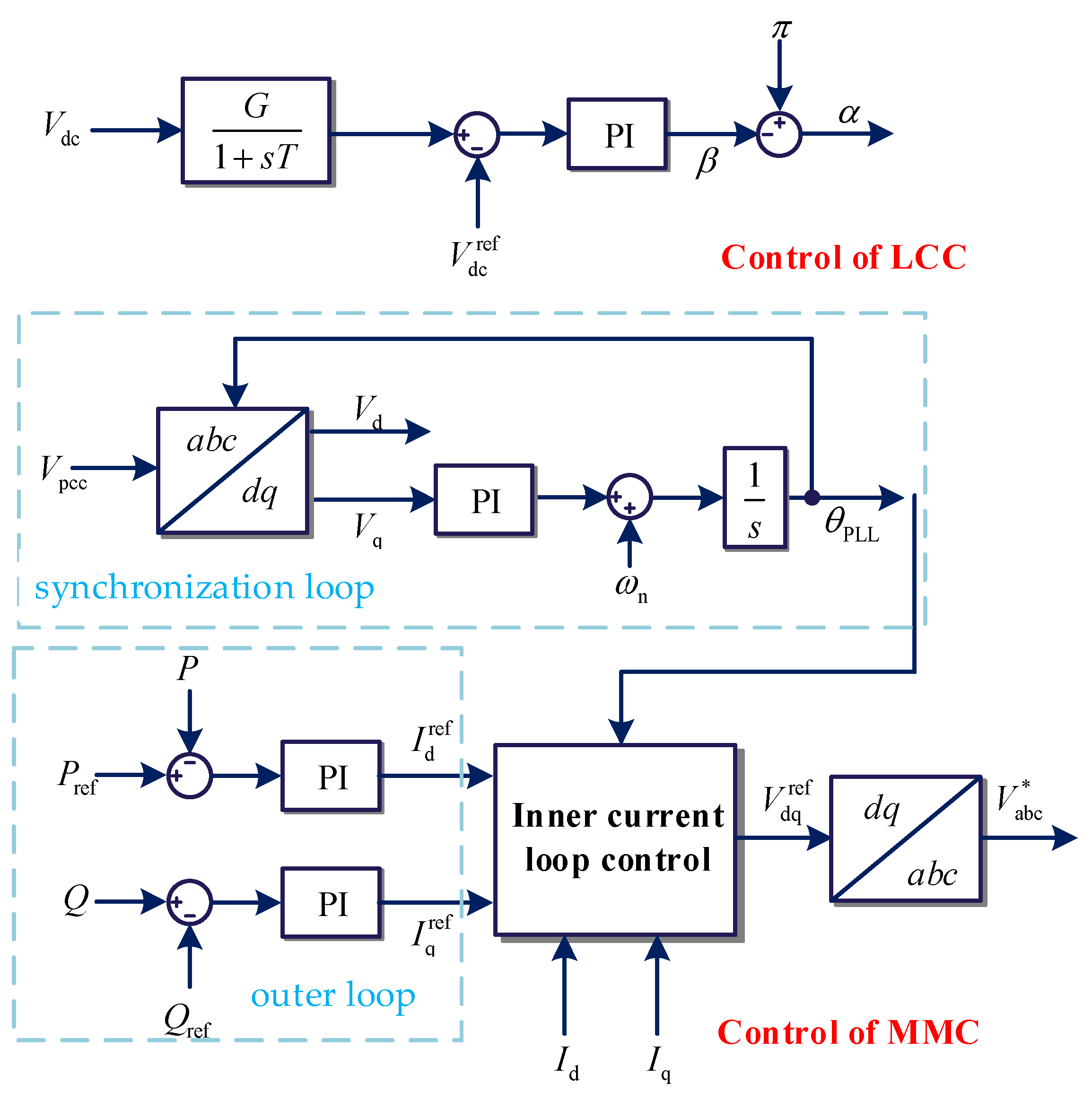
2.2. Power Control
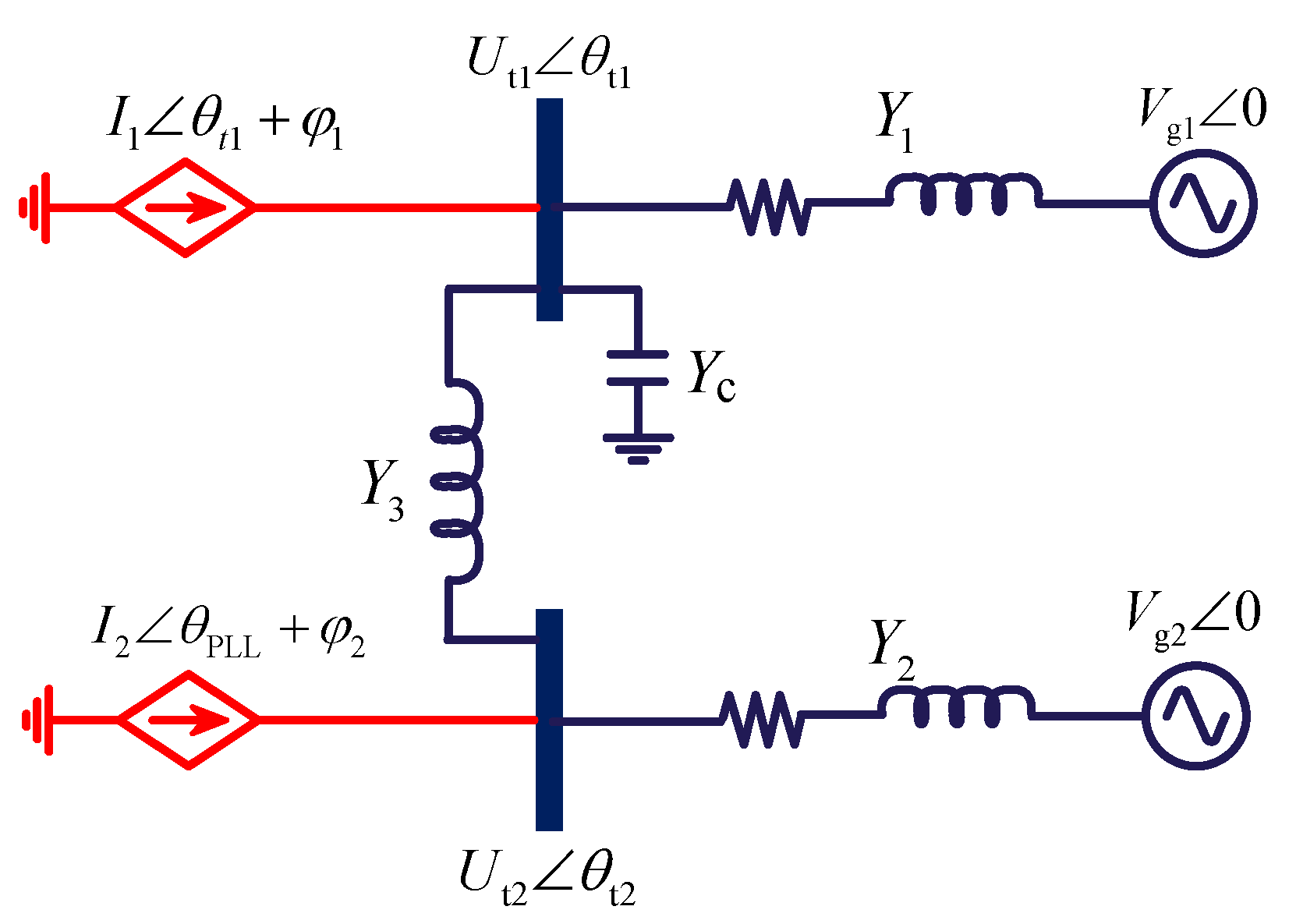
2.3. Equivalent Modeling Network for HMIDC Systems
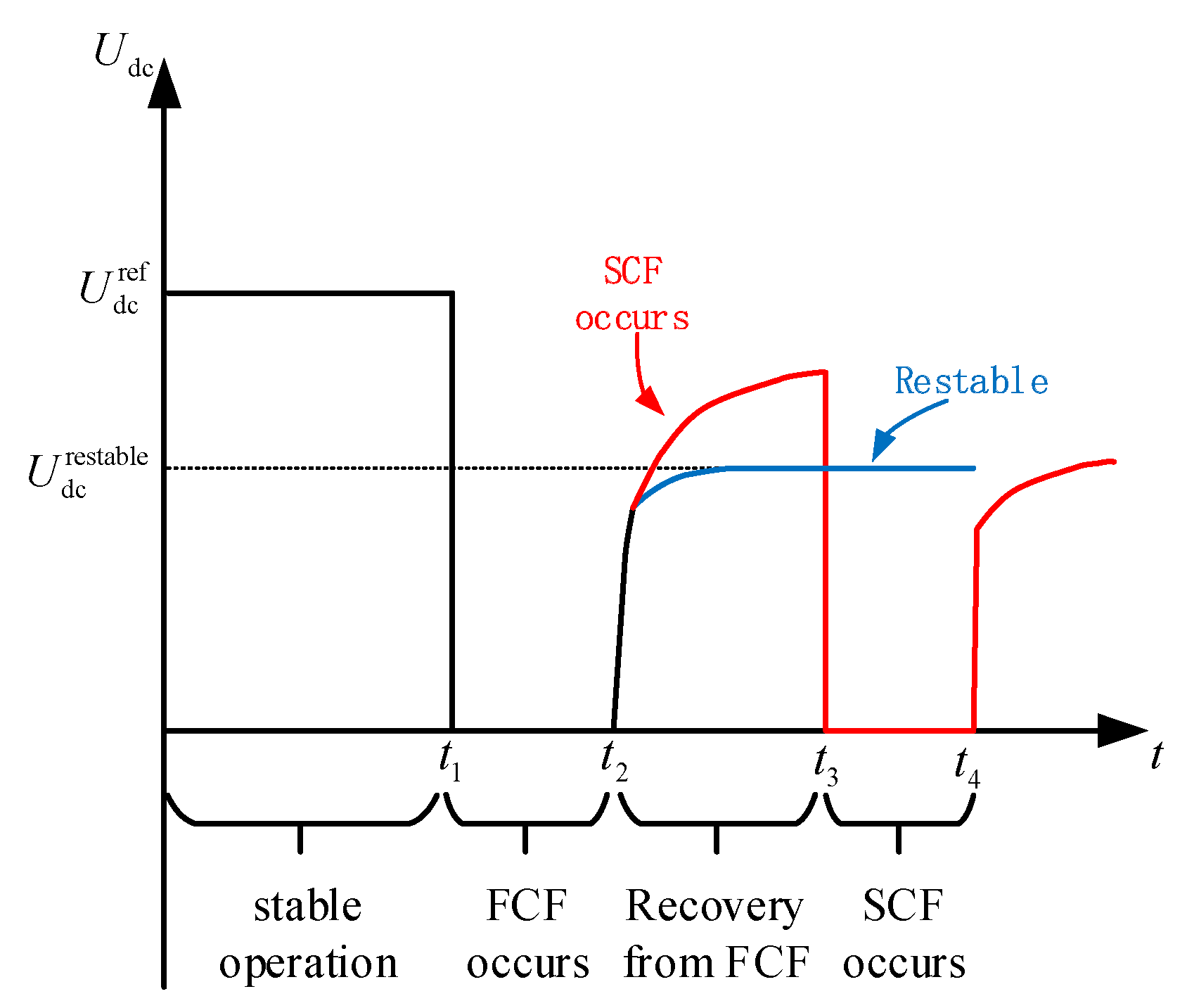
3. Dynamic Characterization of HMIDC Systems under Grid Faults
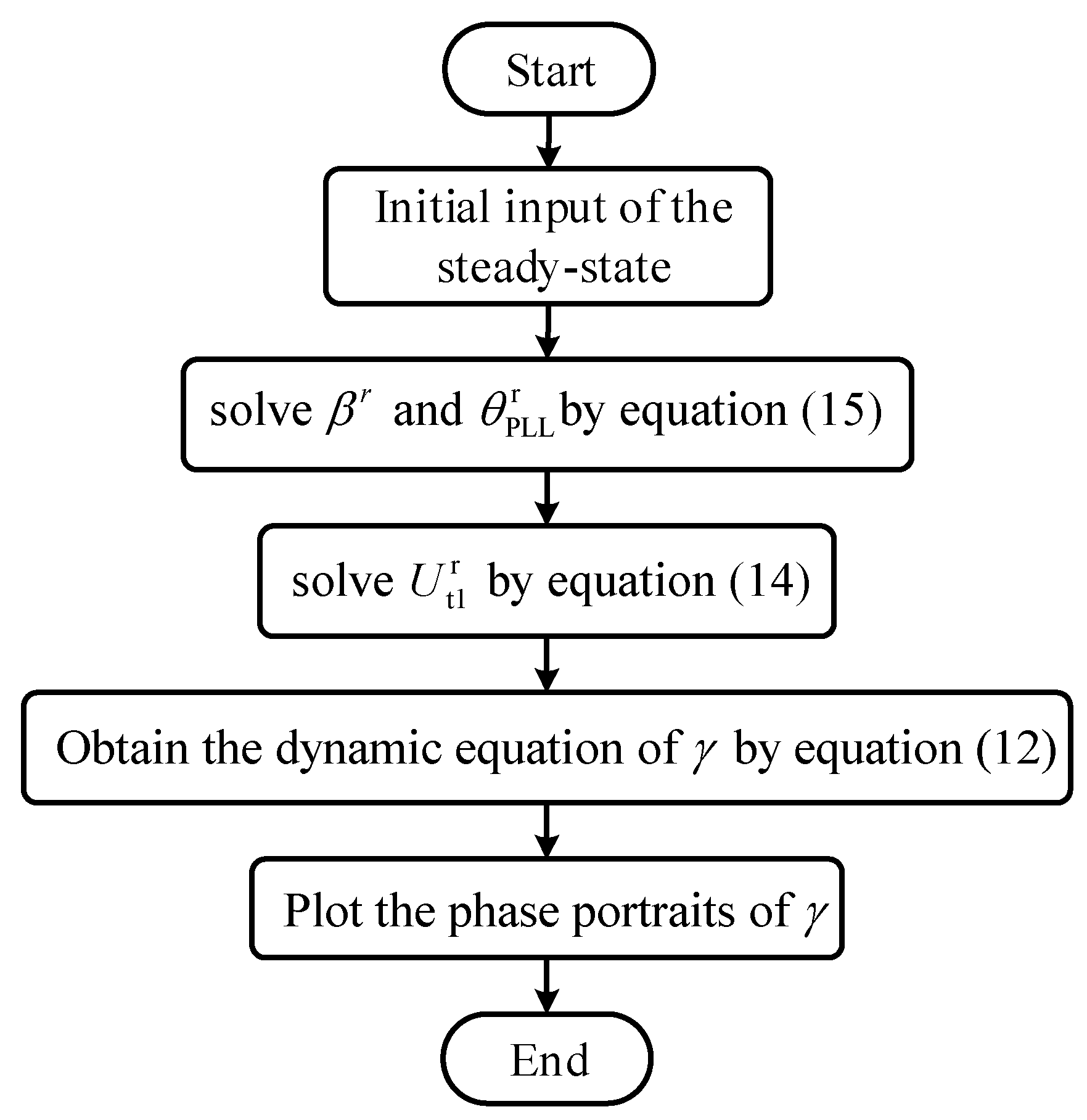
4. Transient Stability Analysis of HMIDC System Based on Phase Portraits
5. Simulation Verification and Analysis
6. Conclusions
- (1)
- The SCF occurs in HMIDC because when the keeps decreasing to its critical value under the control system, the at this point is still less than zero, which indicates that it will continue to decrease to the point at which SCF occurs.
- (2)
- For the LCC inverter with a constant DC voltage controller in the HMIDC system, although changing the parameters of the PI controller has an improved effect on preventing the occurrence of SCF, the decisive role is played by ; if is not changed but only the parameters of the PI controller are changed, SCF will still occur.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guo, J.; Chen, Y.; Liao, S.; Wu, W.; Wang, X.; Guerrero, J.M. Low-Frequency Oscillation Analysis of VSM-Based VSC-HVDC Systems Based on the Five-Dimensional Impedance Stability Criterion. IEEE Trans. Ind. Electron. 2022, 69, 3752–3763. [Google Scholar] [CrossRef]
- Guo, C.; Zhang, Y.; Gole, A.M.; Zhao, C. Analysis of dual-infeed HVDC with LCC-HVDC and VSC-HVDC. IEEE Trans. Power Del. 2012, 27, 1529–1537. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, S.; Lu, Z. Technology Features of the New Generation Power System in China. Proc. CSEE 2018, 38, 1893–1904+2205. [Google Scholar]
- Yin, H.; Zhou, X.; Liu, Y.; Xia, H.; Hong, L.; Zhu, R.; Deng, L. Interaction Mechanism Analysis and Additional Damping Control for Hybrid Multi-Infeed HVDC System. IEEE Trans. Power Del. 2022, 37, 3904–3916. [Google Scholar] [CrossRef]
- Lu, J.; Yuan, X.; Hu, J.; Zhang, M.; Yuan, H. Motion Equation Modeling of LCC-HVDC Stations for Analyzing DC and AC Network Interactions. IEEE Trans. Power Deliv. 2020, 35, 1563–1574. [Google Scholar] [CrossRef]
- Wang, L.; Yang, Z.; Lu, X.; Prokhorov, A.V. Stability analysis of a hybrid multi-infeed HVDC system connected between two offshore wind farms and two power grids. IEEE Trans. Ind. Appl. 2017, 53, 1824–1833. [Google Scholar] [CrossRef]
- Cheng, B.; Xu, Z.; Xu, W. Optimal dc-segmentation for multi-infeed HVDC systems based on stability performance. IEEE Trans. Power Syst. 2016, 31, 2445–2454. [Google Scholar] [CrossRef]
- Guo, C.; Ye, Q.; Chen, X.; Zhao, C. Subsequent commutation failure suppression control for LCC-HVDC system based on fuzzy clustering. CSEE J. Power Energy Syst. 2024, 1–9. [Google Scholar] [CrossRef]
- Guo, C.; Liu, W.; Zhao, J.; Zhao, C. Impact of Control System on Small-Signal Stability of Hybrid Multi-Infeed HVDC system. IET Gener. Transm. Distrib. 2018, 12, 4233–4239. [Google Scholar] [CrossRef]
- Guo, C.; Yang, S.; Liu, W.; Zhao, C. Single-Input–Single-Output Feedback Control Model and Stability Margin Analysis for Hybrid Dual-Infeed HVDC System. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3061–3071. [Google Scholar] [CrossRef]
- Luo, C.; Liu, T.; Wang, X.; Ma, X. Design-Oriented Analysis of DC-Link Voltage Control for Transient Stability of Grid-Forming Inverters. IEEE Trans. Ind. Electron. 2024, 71, 3698–3707. [Google Scholar] [CrossRef]
- Xiao, H.; Duan, X.; Zhang, Y.; Lan, T.; Li, Y. Analytically Quantifying the Impact of Strength on Commutation Failure in Hybrid Multi-Infeed HVdc Systems. IEEE Trans. Power Electron. 2022, 37, 4962–4967. [Google Scholar] [CrossRef]
- Chen, X.; Gole, A.M.; Han, M. Analysis of mixed inverter/rectifier multi-infeed HVDC systems. IEEE Trans. Power Del. 2012, 27, 1565–1573. [Google Scholar] [CrossRef]
- Hong, L.; Zhou, X.; Liu, Y.; Xia, H.; Yin, H.; Chen, Y.; Zhou, L.; Xu, Q. Analysis and Improvement of the Multiple Controller Interaction in LCC-HVDC for Mitigating Repetitive Commutation Failure. IEEE Trans. Power Deliv. 2021, 36, 1982–1991. [Google Scholar] [CrossRef]
- Shao, Y.; Tang, Y. Fast Evaluation of Commutation Failure Risk in Multi-Infeed HVDC Systems. IEEE Trans. Power Syst. 2018, 33, 646–653. [Google Scholar] [CrossRef]
- Xiao, H.; Li, Y. Multi-infeed voltage interaction factor: A unified measure of inter-inverter interactions in hybrid multi-infeed HVDC systems. IEEE Trans. Power Del. 2020, 35, 2040–2048. [Google Scholar] [CrossRef]
- Xiao, H.; Li, Y.; Duan, X. Efficient approach for commutation failure immunity level assessment in hybrid multi-infeed HVDC systems. J. Eng. 2017, 2017, 719–723. [Google Scholar] [CrossRef]
- Xiao, H.; Li, Y.H.; Sun, X. Strength Evaluation of Multi-Infeed LCC-HVDC Systems Based on the Virtual Impedance Concept. IEEE Trans. Power Syst. 2020, 35, 2863–2875. [Google Scholar] [CrossRef]
- Jiang, M.; Guo, Q.; Sun, H.; Ge, H. Short-Term Voltage Stability Constrained Unit Commitment for Receiving-End Grid With Multi-Infeed HVDCs. IEEE Trans. Power Syst. 2021, 36, 2603–2613. [Google Scholar] [CrossRef]
- Liu, W.; Zhao, C.; Guo, C.; Lu, Y. Impact of VSC-HVDC on the Commutation Failure Immunity of LCC-HVDC in Dual-Infeed Hybrid HVDC System. Power Syst. Clean Energy 2017, 33, 1–7. [Google Scholar]
- Tang, M.; Ma, L.; Zhang, B.; Wu, C.; Wang, L.; Li, E.; Chu, X. Optimal placement of dynamic reactive power compensation devices for improving immunity to commutation failure in multi-infeed HVDC systems. In Proceedings of the 2017 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 247–251. [Google Scholar]
- Chao, X.; Jinxin, O.; Xiong, X.; Li, M.; Zheng, D. Subsequent Commutation Failure Control Method Based on Coordination Between Active and Reactive Powers in Hybrid Dual-infeed HVDC System. Power Syst. Technol. 2019, 43, 3523–3531. [Google Scholar]
- Wu, H.; Wang, X. Design-Oriented Transient Stability Analysis of PLL-Synchronized Voltage-Source Converters. IEEE Trans. Power Electron. 2020, 35, 3573–3589. [Google Scholar] [CrossRef]
- Shu, H.; Wang, S.; Lei, S. Single-ended protection method for hybrid HVDC transmission line based on transient voltage characteristic frequency band. Prot. Control Mod. Power Syst. 2023, 8, 26. [Google Scholar] [CrossRef]
- Hou, J.; Song, G.; Fan, Y. Fault identification scheme for protection and adaptive reclosing in a hybrid multi-terminal HVDC system. Prot. Control Mod. Power Syst. 2023, 8, 23. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Vdc | 500 kV | 10 | |
| Idc | 1 kA | 1 kMW | |
| Xc | 13.57 Ω | 0 kMVar | |
| 0.1 | 22 | ||
| 100 | 500 kV |
| Research Methods | Method I | Method II | Method III | Method IV | Method V |
|---|---|---|---|---|---|
| Suitable for large disturbances | √ | √ | × | × | √ |
| Consideration of control systems | × | × | √ | √ | √ |
| Stabilizing design guidelines | × | × | √ | √ | √ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, H.; Xiang, H.; Lei, Z.; Ma, J.; Wen, Z.; Wang, S. Evaluation Approach and Controller Design Guidelines for Subsequent Commutation Failure in Hybrid Multi-Infeed HVDC System. Electronics 2024, 13, 3456. https://doi.org/10.3390/electronics13173456
Fang H, Xiang H, Lei Z, Ma J, Wen Z, Wang S. Evaluation Approach and Controller Design Guidelines for Subsequent Commutation Failure in Hybrid Multi-Infeed HVDC System. Electronics. 2024; 13(17):3456. https://doi.org/10.3390/electronics13173456
Chicago/Turabian StyleFang, Hui, Hongji Xiang, Zhiwei Lei, Junpeng Ma, Zhongyi Wen, and Shunliang Wang. 2024. "Evaluation Approach and Controller Design Guidelines for Subsequent Commutation Failure in Hybrid Multi-Infeed HVDC System" Electronics 13, no. 17: 3456. https://doi.org/10.3390/electronics13173456