
Ship-VNet: An Algorithm for Ship Velocity Analysis Based on Optical Remote Sensing Imagery Containing Kelvin Wakes

Abstract
:1. Introduction
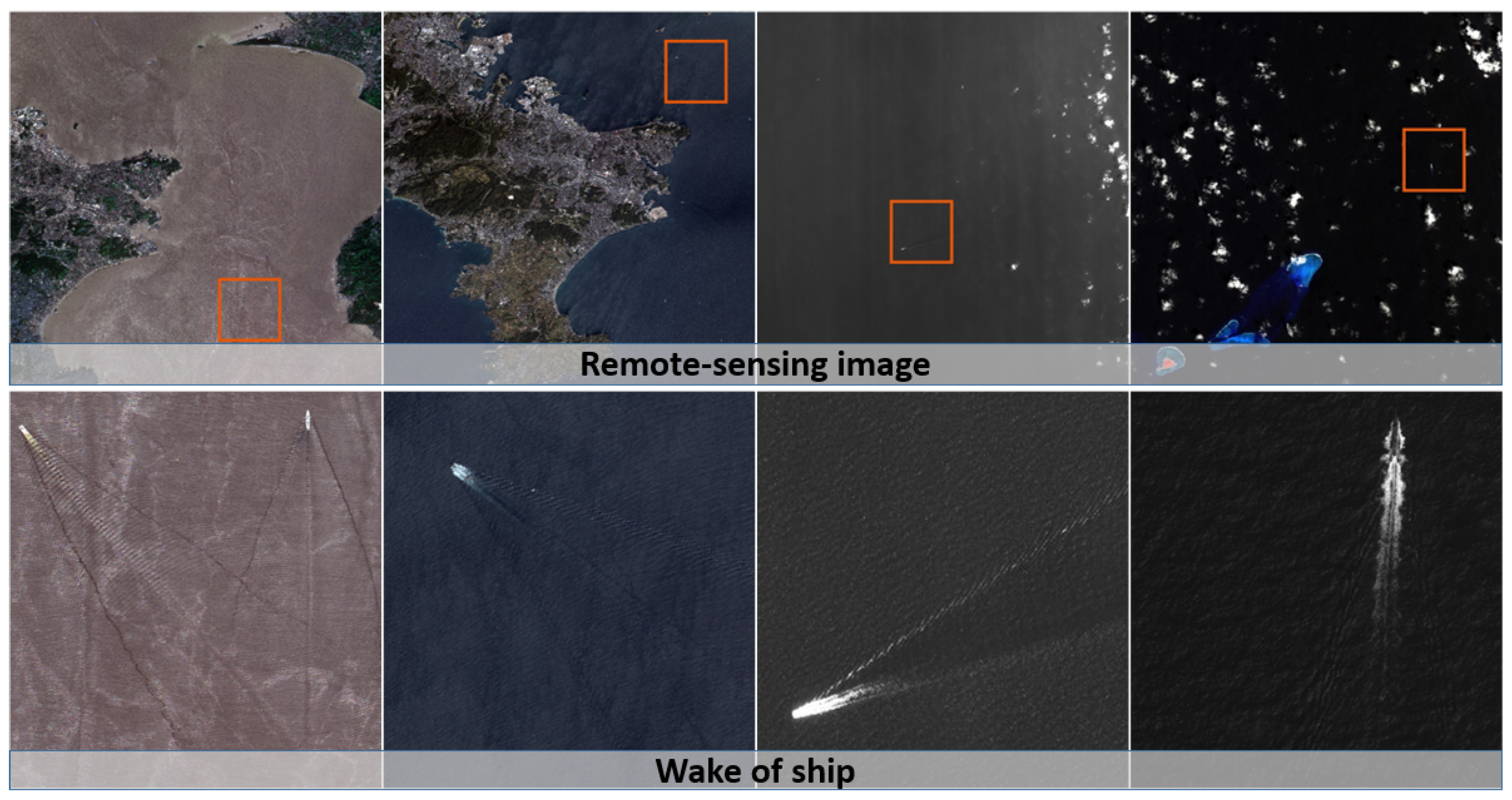
- Aiming at the lack of corresponding data between ship wakes and ship velocity, an optical remote sensing image ship velocity and heading analysis dataset for Kelvin wakes is created.
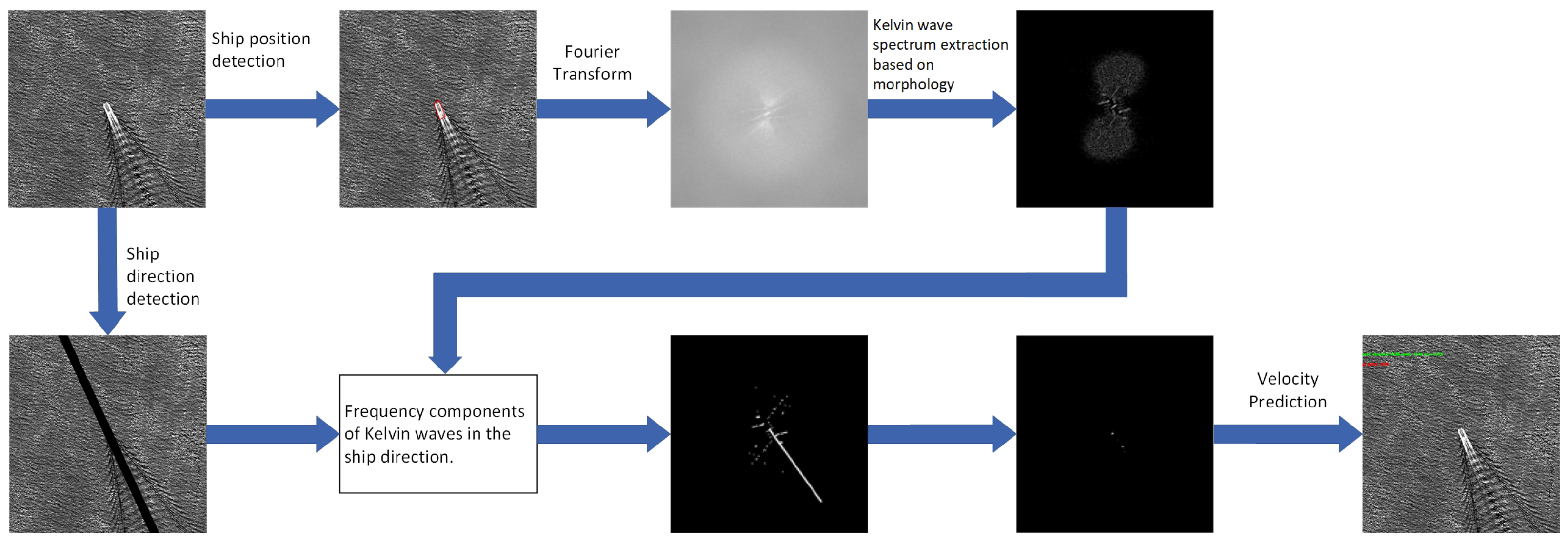
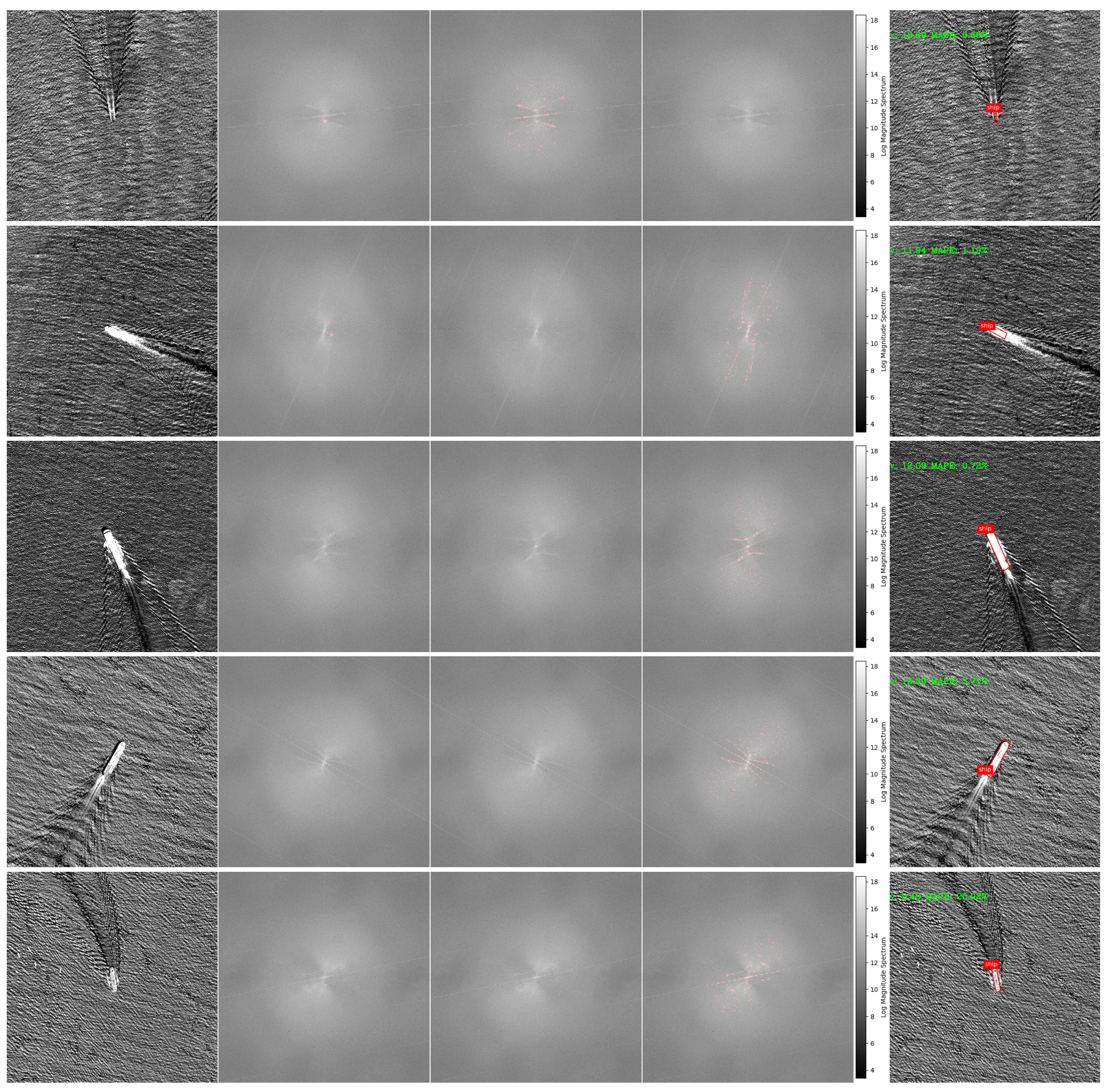
- Aiming at the problem that the wake is difficult to define and extract under a complex background, which makes heading analysis based on the wake difficult, a heading analysis method based on rotating target detection is proposed, which uses the rotating rectangular frame to analyze the bow and stern lines of the ship. The relationship between the kinematic characteristics of the Kelvin wake and the ship velocity is studied and experimentally analyzed, and a method for processing the wake spectrum information in the frequency domain and automatically extracting the parameters required for calculating the ship velocity is used.
- The method analyzes ship velocity information in optical remote sensing images, does not need to detect targets with sparse features of complex small targets at the same time for ships and wakes and does not need to extract the wakes separately for reconstruction, simulation and other processing.
- The quantitative experimental results on real data show that this method can directly detect the target of ships with Kelvin wakes and automatically extract the velocity of ships.
2. Dataset Description
3. Methodology
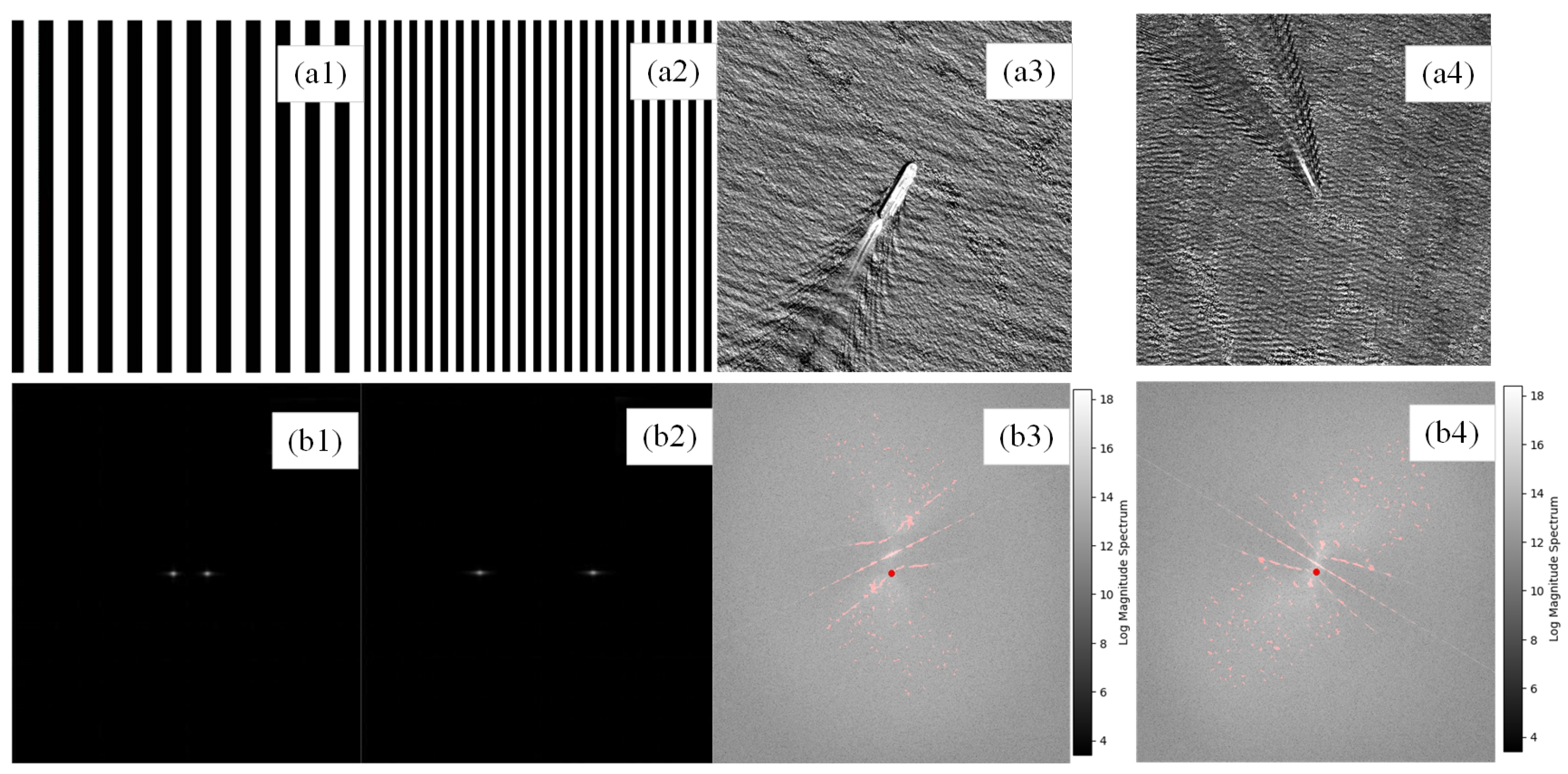
3.1. Ship Direction Extraction
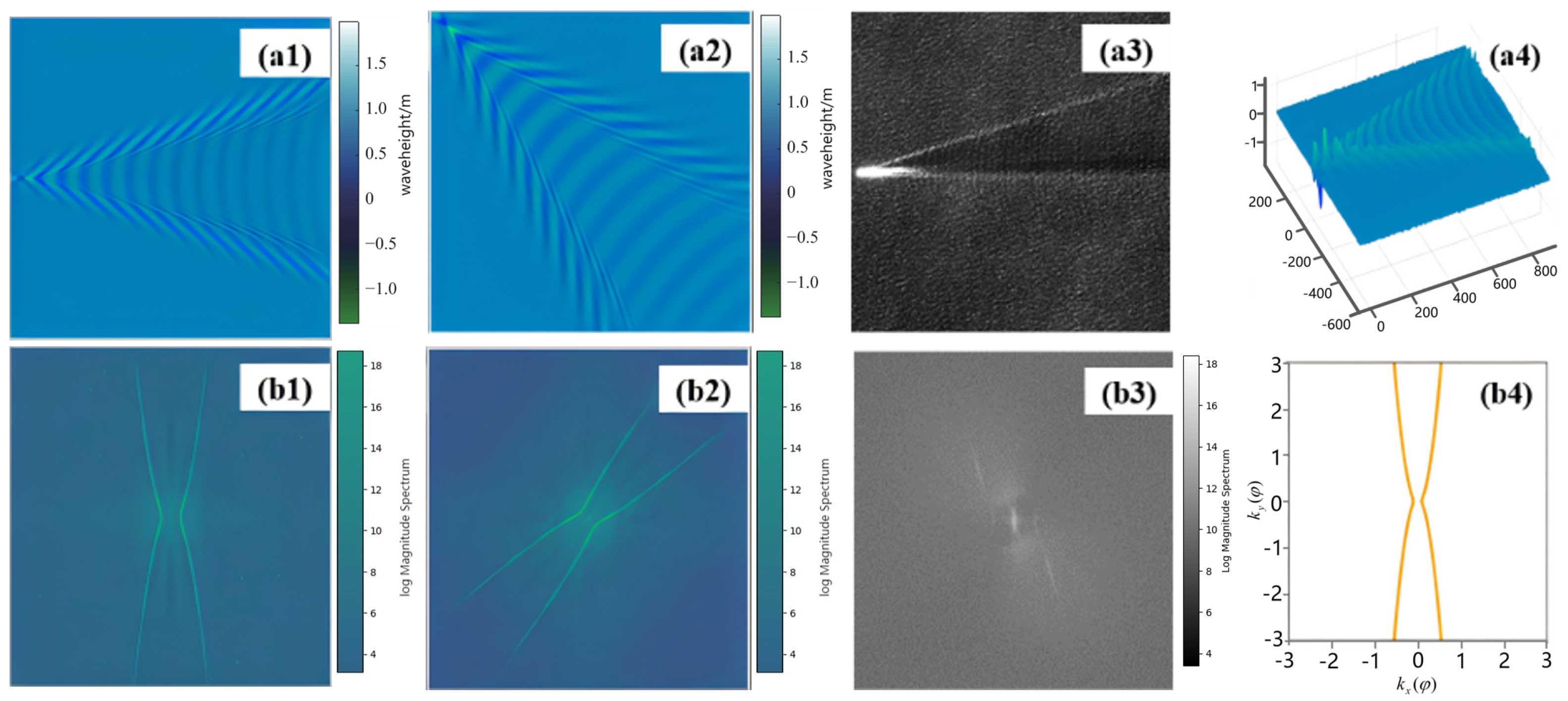
3.2. Velocity Analysis
4. Experiments
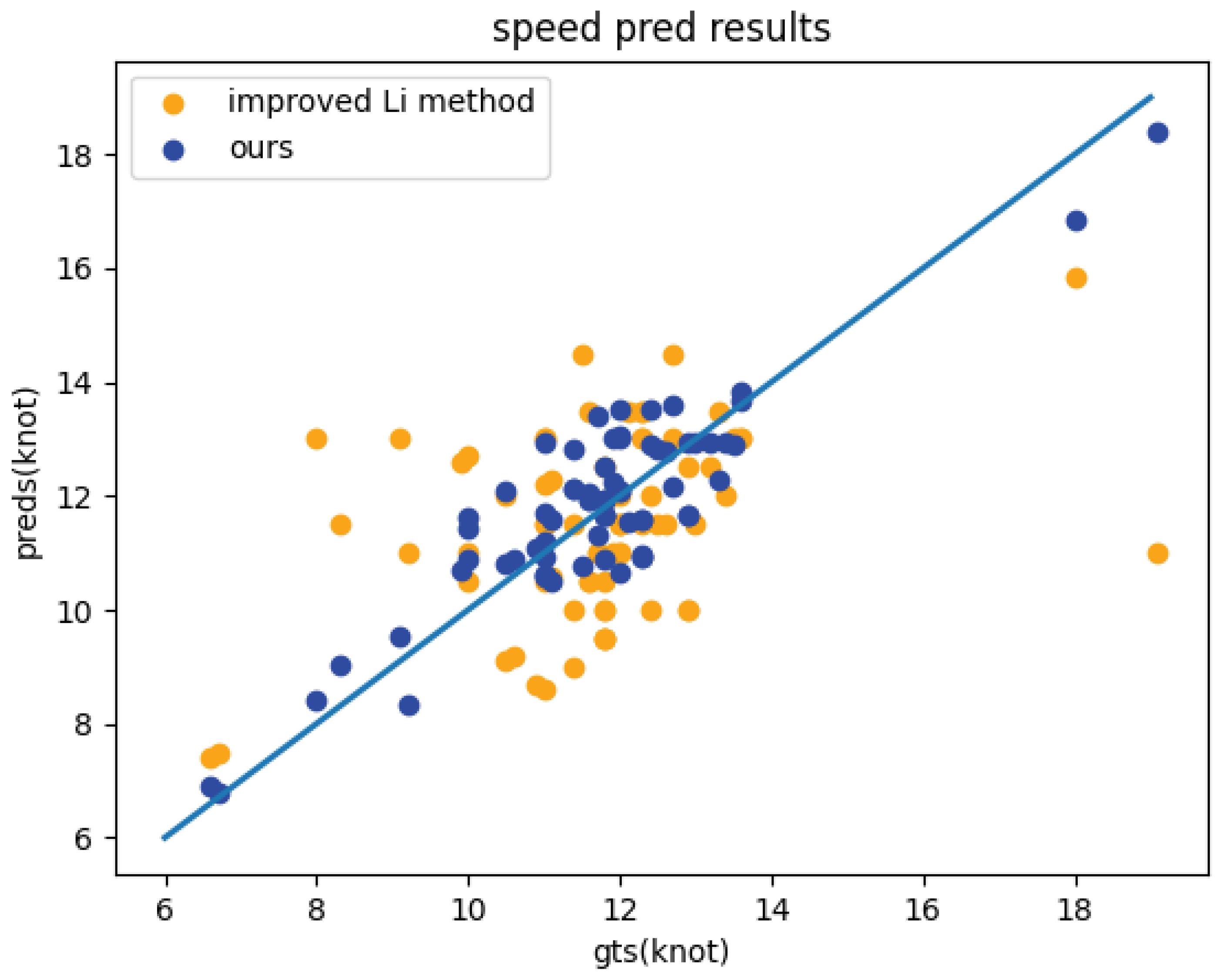
4.1. Evaluation Index of Ship Velocity Analysis
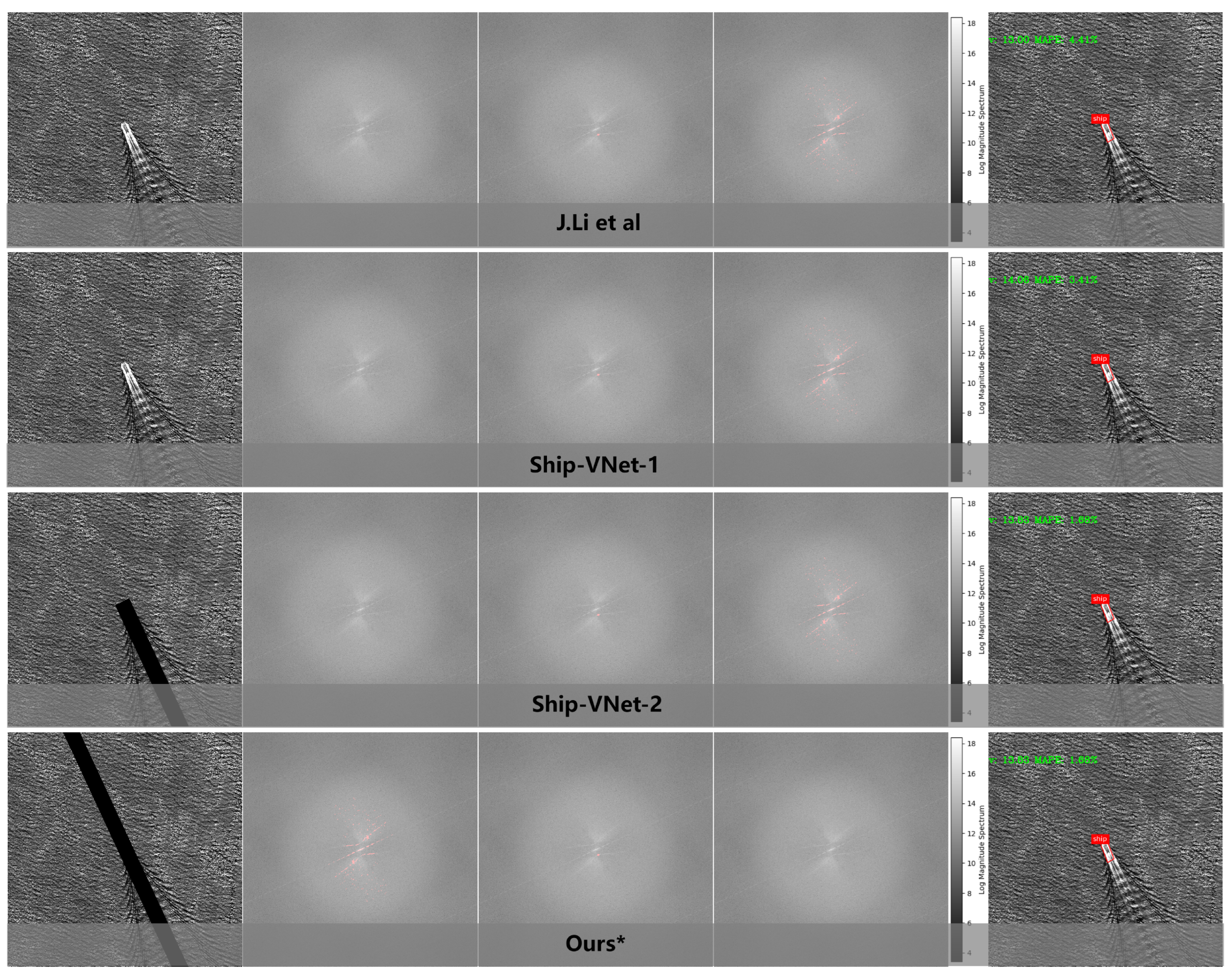
4.2. Results
4.3. Further Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, X.; Ling, J.; Wang, S.; Yang, Y.; Luo, L.; Yan, Y. Ship detection from coastal surveillance videos via an ensemble Canny-Gaussian-morphology framework. J. Navig. 2021, 74, 1252–1266. [Google Scholar] [CrossRef]
- Ray, C.; Dréo, R.; Camossi, E.; Jousselme, A.L.; Iphar, C. Heterogeneous integrated dataset for maritime intelligence, surveillance, and reconnaissance. Data Brief 2019, 25, 104141. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Hou, J.; Zhu, X.; Wang, C.; Shi, H.; Wang, J.; Li, Y.; Ren, P. Hyperspectral Image Super-Resolution with ConvLSTM Skip-Connections. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–16. [Google Scholar] [CrossRef]
- Bassam, A.M.; Phillips, A.B.; Turnock, S.R.; Wilson, P.A. Artificial neural network based prediction of ship speed under operating conditions for operational optimization. Ocean. Eng. 2023, 278, 114613. [Google Scholar] [CrossRef]
- Lang, X.; Wu, D.; Mao, W. Physics-informed machine learning models for ship speed prediction. Expert Syst. Appl. 2024, 238, 121877. [Google Scholar] [CrossRef]
- Ren, W.J.; Liu, P.; Ren, X.C.; Jin, Y.Q. Sar image simulation of ship turbulent wake using semi-empirical energy spectrum. IEEE J. Multiscale Multiphysics Comput. Tech. 2021, 6, 1–7. [Google Scholar] [CrossRef]
- Stapleton, N. Bright narrow V-shaped wakes observed by the NASA/JPL AIRSAR during the Loch Linnhe Experiment 1989. In Proceedings of the 1995 International Geoscience and Remote Sensing Symposium, IGARSS’95, Quantitative Remote Sensing for Science and Applications, Firenze, Italy, 10–14 July 1995; Volume 3, pp. 1646–1648. [Google Scholar]
- Meunier, P.; Le Dizès, S.; Redekopp, L.; Spedding, G. Internal waves generated by a stratified wake: Experiment and theory. J. Fluid Mech. 2018, 846, 752–788. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, J.; Qin, Y. A novel technique for ship wake detection from optical images. Remote Sens. Environ. 2021, 258, 112375. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, R. Ship wakes in optical images. J. Atmos. Ocean. Technol. 2018, 35, 1633–1648. [Google Scholar] [CrossRef]
- Tunaley, J.K. The estimation of ship velocity from SAR imagery. In Proceedings of the IGARSS 2003—IEEE International Geoscience and Remote Sensing Symposium, IEEE Cat. No. 03CH37477, Toulouse, France, 21–25 July 2003; Volume 1, pp. 191–193. [Google Scholar]
- Zilman, G.; Zapolski, A.; Marom, M. The speed and beam of a ship from its wake’s SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2335–2343. [Google Scholar] [CrossRef]
- Panico, A.; Graziano, M.D.; Renga, A. SAR-based vessel velocity estimation from partially imaged Kelvin pattern. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2067–2071. [Google Scholar] [CrossRef]
- Sun, Y.X.; Liu, P.; Jin, Y.Q. Ship wake components: Isolation, reconstruction, and characteristics analysis in spectral, spatial, and TerraSAR-X image domains. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4209–4224. [Google Scholar] [CrossRef]
- Zilman, G.; Zapolski, A.; Marom, M. On detectability of a ship’s Kelvin wake in simulated SAR images of rough sea surface. IEEE Trans. Geosci. Remote Sens. 2014, 53, 609–619. [Google Scholar] [CrossRef]
- Ursell, F. On Kelvin’s ship-wave pattern. J. Fluid Mech. 1960, 8, 418–431. [Google Scholar] [CrossRef]
- Kang, K.m.; Kim, D.j. Ship velocity estimation from ship wakes detected using convolutional neural networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4379–4388. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Ship heading and velocity analysis by wake detection in SAR images. Acta Astronaut. 2016, 128, 72–82. [Google Scholar] [CrossRef]
- Tuck, E.; Collins, J.; Wells, W. On ship wave patterns and their spectra. J. Ship Res. 1971, 15, 11–21. [Google Scholar] [CrossRef]
- Li, J.; Wang, L.; Zhang, M.; Jiao, Y.C.; Liu, G. Ship velocity automatic estimation method via two-dimensional spectrum pattern of Kelvin wakes in SAR images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 4779–4786. [Google Scholar] [CrossRef]
- Lv, T.; Tang, P.; Zhang, J. A Real-Time AIS Data Cleaning and Indicator Analysis Algorithm Based on Stream Computing. Sci. Program. 2023, 2023, 8345603. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Z.; Zheng, Z.; Wang, X.; Guedes Soares, C. Modelling dynamic maritime traffic complexity with radial distribution functions. Ocean. Eng. 2021, 241, 109990. [Google Scholar] [CrossRef]
- Oumansour, K.; Wang, Y.; Saillard, J. Multifrequency SAR observation of a ship wake. IEEE Proc. Radar Sonar Navig. 1996, 143, 275–280. [Google Scholar] [CrossRef]
- Wang, H.; Sun, S.; Bai, X.; Wang, J.; Ren, P. A Reinforcement Learning Paradigm of Configuring Visual Enhancement for Object Detection in Underwater Scenes. IEEE J. Ocean. Eng. 2023, 48, 443–461. [Google Scholar] [CrossRef]
- Ren, Y.; Zheng, M.; Zhang, L.; Fan, H.; Xie, Y. An Adaptive False Target Suppression and Radial Velocity Estimation Method of Moving Targets Based on Image-Domain for High-Resolution and Wide-Swath SAR. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–18. [Google Scholar] [CrossRef]
- Ren, Y.; Wang, J. Velocity Estimation of Moving Targets in Multichannel SAR Images via Optimally-Weighted Velocity Averaging Based on MUSIC Algorithm. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15–19 December 2021; pp. 966–969. [Google Scholar]
- Tao, X.; Paoletti, M.E.; Wu, Z.; Haut, J.M.; Ren, P.; Plaza, A. An Abundance-Guided Attention Network for Hyperspectral Unmixing. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5505414. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, W.; Bai, L.; Ren, P. Metalantis: A Comprehensive Underwater Image Enhancement Framework. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5618319. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Kelvin Wake | Turbulent Wake | Additional Calculations | MAPE |
|---|---|---|---|---|
| Li et al. [20] | ✓ | - | - | 12.39% |
| Ship-Net-1 | ✓ | ✓ | - | 10.82% |
| Ship-Net-2 | ✓ | - | ✓ | 6.07% |
| Ours | ✓ | - | - | 6.07% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, M.; Fang, S.; Wan, L.; Kang, W.; Ma, L.; He, Y.; Zhao, K. Ship-VNet: An Algorithm for Ship Velocity Analysis Based on Optical Remote Sensing Imagery Containing Kelvin Wakes. Electronics 2024, 13, 3468. https://doi.org/10.3390/electronics13173468
Gao M, Fang S, Wan L, Kang W, Ma L, He Y, Zhao K. Ship-VNet: An Algorithm for Ship Velocity Analysis Based on Optical Remote Sensing Imagery Containing Kelvin Wakes. Electronics. 2024; 13(17):3468. https://doi.org/10.3390/electronics13173468
Chicago/Turabian StyleGao, Mingming, Shaojun Fang, Ling Wan, Wenchao Kang, Lei Ma, Ya He, and Kai Zhao. 2024. "Ship-VNet: An Algorithm for Ship Velocity Analysis Based on Optical Remote Sensing Imagery Containing Kelvin Wakes" Electronics 13, no. 17: 3468. https://doi.org/10.3390/electronics13173468