
Application of Variable Universe Fuzzy PID Controller Based on ISSA in Bridge Crane Control


Abstract
:1. Introduction
2. Bridge Crane System Modeling
3. Improved Sparrow Search Algorithm
3.1. Standard Sparrow Search Algorithm
3.2. Proposed ISSA Algorithm
3.2.1. Tent Chaotic Map Strategy
3.2.2. Northern Goshawk Location Exploration Strategy
3.2.3. Adaptive T-Distribution Variation Strategy
3.2.4. General Structure of ISSA
3.3. Performance of ISSA
4. Proposed ISSA-VUFPID Control Algorithm
4.1. Fuzzy PID Controller
4.2. Variable Universe Fuzzy PID Controller
4.3. Proposed ISSA-VUFPID Controller
5. Simulation Experiments
5.1. Experimental and Simulation Analysis of the VUFPID Controller
5.2. Experimental and Simulation Analysis of the ISSA-VUFPID Controller
5.3. Robustness Simulation Experiments
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, Y.; Jiang, H.; Gan, L.; Hua, C.; Li, J. Fixed-Time Composite Neural Learning Control of Flexible Telerobotic Systems. IEEE Trans. Cybern. 2024, 54, 3602–3614. [Google Scholar] [CrossRef] [PubMed]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2015, 35, 161–185. [Google Scholar] [CrossRef]
- Liu, Y.; Lin, X.; Liu, Y.; Jiang, A.; Zhang, C. Affine formation maneuver control of underactuated surface vessels: Guaranteed safety under moving obstacles in narrow channels. Ocean. Eng. 2024, 303, 117721. [Google Scholar] [CrossRef]
- Mohammed, A.; Alghanim, K.; Andani, M.T. A robust input shaper for trajectory control of overhead cranes with non-zero initial states. Int. J. Dyn. Control 2021, 9, 230–239. [Google Scholar] [CrossRef]
- Adeli, M.; Zarabadipour, H.; Zarabadi, S.H.; Shoorehdeli, M.A. Anti-swing control for a double-pendulum-type overhead crane via parallel distributed fuzzy LQR controller combined with genetic fuzzy rule set selection. In Proceedings of the 2011 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 25–27 November 2011; pp. 306–311. [Google Scholar]
- Jolevski, D.; Bego, O. Model predictive control of gantry/bridge crane with anti-sway algorithm. J. Mech. Sci. Technol. 2015, 29, 827–834. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, X.; Rong, X.; Tian, X.; Li, Y. Adaptive tracking control for double-pendulum overhead cranes subject to tracking error limitation, parametric uncertainties and external disturbances. Mech. Syst. Signal Process. 2016, 76–77, 15–32. [Google Scholar] [CrossRef]
- Hou, C.; Liu, C.; Li, Z.; Xin, Z.; Zhang, H. Tower crane systems modeling and adaptive robust sliding mode control design under unknown frictions and wind disturbances. Trans. Inst. Meas. Control 2024, 01423312241260911. [Google Scholar] [CrossRef]
- Fujioka, D.; Singhose, W. Performance Comparison of Input-Shaped Model Reference Control on an Uncertain Flexible System. IFAC Pap. 2015, 48, 129–134. [Google Scholar] [CrossRef]
- Bozkurt, B.; Ertogan, M. Heave and horizontal displacement and anti-sway control of payload during ship-to-ship load transfer with an offshore crane on very rough sea conditions. Ocean. Eng. 2023, 267, 113309. [Google Scholar] [CrossRef]
- Yan, Y.; Qin, Y.-X.; Zhang, L.-S.; Jia, T.; Sun, F. Swing Suppression Control in Quayside Crane by Using Fuzzy Logic and Improved Particle Swarm Optimization Algorithm. Iran. J. Sci. Technol. Trans. Mech. Eng. 2023, 47, 1131–1144. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Chen, J.; Chen, J. Research and Application of Control Algorithm Based on Intelligent Traveling Crane. In Proceedings of the 2023 IEEE 13th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Qinhuangdao, China, 11–14 July 2023; pp. 148–153. [Google Scholar]
- Yu, Z.; Dong, H.-M.; Liu, C.-M. Research on Swing Model and Fuzzy Anti Swing Control Technology of Bridge Crane. Machines 2023, 11, 579. [Google Scholar] [CrossRef]
- El-Nagar, A.M.; El-Bardini, M. Parallel realization for self-tuning interval type-2 fuzzy controller. Eng. Appl. Artif. Intell. 2017, 61, 8–20. [Google Scholar] [CrossRef]
- Fu, J.; Liu, J.; Xie, D.; Sun, Z. Application of Fuzzy PID Based on Stray Lion Swarm Optimization Algorithm in Overhead Crane System Control. Mathematics 2023, 11, 2170. [Google Scholar] [CrossRef]
- Sałabun, W.; Więckowski, J.; Shekhovtsov, A.; Palczewski, K.; Jaszczak, S.; Wątróbski, J. How to Apply Fuzzy MISO PID in the Industry? An Empirical Study Case on Simulation of Crane Relocating Containers. Electronics 2020, 9, 2017. [Google Scholar] [CrossRef]
- Zeng, W.; Jiang, Q.; Xie, J.; Yu, T. A functional variable universe fuzzy PID controller for load following operation of PWR with the multiple model. Ann. Nucl. Energy 2020, 140, 107174. [Google Scholar] [CrossRef]
- Yang, S.; Deng, B.; Wang, J.; Liu, C.; Li, H.; Lin, Q.; Fietkiewicz, C.; Loparo, K.A. Design of Hidden-Property-Based Variable Universe Fuzzy Control for Movement Disorders and Its Efficient Reconfigurable Implementation. IEEE Trans. Fuzzy Syst. 2019, 27, 304–318. [Google Scholar] [CrossRef]
- Mingxue, L.; Guolai, Y.; Xiaoqing, L.; Guixiang, B. Variable Universe Fuzzy Control of Adjustable Hydraulic Torque Converter Based on Multi-Population Genetic Algorithm. IEEE Access 2019, 7, 29236–29244. [Google Scholar] [CrossRef]
- Liu, G.; Jiang, W.; Wang, Q.; Wang, T. Enhanced variable universe fuzzy proportional–integral–derivative control of structural vibration with real-time adaptive contracting–expanding factors. J. Vib. Control. 2021, 28, 1962–1975. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control. Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z. Artificial immune algorithm-sparrow search algorithm and its application in network intrusion detection. J. Intell. Fuzzy Syst. 2022, 43, 5001–5011. [Google Scholar] [CrossRef]
- Liu, L.; Liang, J.; Guo, K.; Ke, C.; He, D.; Chen, J. Dynamic Path Planning of Mobile Robot Based on Improved Sparrow Search Algorithm. Biomimetics 2023, 8, 182. [Google Scholar] [CrossRef] [PubMed]
- Gao, B.; Shen, W.; Guan, H.; Zheng, L.; Zhang, W. Research on Multistrategy Improved Evolutionary Sparrow Search Algorithm and its Application. IEEE Access 2022, 10, 62520–62534. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhang, X.; He, S.; Shen, J. A Fractional-Order Chaotic Sparrow Search Algorithm for Enhancement of Long Distance Iris Image. Mathematics 2021, 9, 2790. [Google Scholar] [CrossRef]
- Chen, Y.-J.; Huang, H. A novel conceptual design approach for autonomous underwater helicopter based on multidisciplinary collaborative optimization. Eng. Appl. Comput. Fluid Mech. 2024, 18, 2325494. [Google Scholar] [CrossRef]
- Dehghani, M.Š.H.; Trojovský, P. Northern Goshawk Optimization: A New Swarm-Based Algorithm for Solving Optimization Problems. IEEE Access 2021, 9, 162059–162080. [Google Scholar] [CrossRef]
- Huang, X.; Wang, S.; Lu, T.; Li, H.; Wu, K.; Deng, W. Chloride Permeability Coefficient Prediction of Rubber Concrete Based on the Improved Machine Learning Technical: Modelling and Performance Evaluation. Polymers 2023, 15, 308. [Google Scholar] [CrossRef]
- Ouyang, M.; Wang, Y.; Wu, F.; Lin, Y. Continuous Reactor Temperature Control with Optimized PID Parameters Based on Improved Sparrow Algorithm. Processes 2023, 11, 1302. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Guan, Z.; Ren, C.; Niu, J.; Wang, P.; Shang, Y. Great Wall Construction Algorithm: A novel meta-heuristic algorithm for engineer problems. Expert Syst. Appl. 2023, 233, 120905. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Trojovský, P.; Dehghani, M. Subtraction-Average-Based Optimizer: A New Swarm-Inspired Metaheuristic Algorithm for Solving Optimization Problems. Biomimetics 2023, 8, 149. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Zhao, D.; Heidari, A.A.; Liu, L.; Zhang, X.; Mafarja, M.; Chen, H. RIME: A physics-based optimization. Neurocomputing 2023, 532, 183–214. [Google Scholar] [CrossRef]
- Li, H.; Hui, Y.; Ma, J.; Wang, Q.; Zhou, Y.; Wang, H. Research on Variable Universe Fuzzy Multi-Parameter Self-Tuning PID Control of Bridge Crane. Appl. Sci. 2023, 13, 4830. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function Name | Search Space | Dimensionality | Optimum Value |
|---|---|---|---|
| F1 Sphere | [−100, 100] | 30 | 0 |
| F2 Schwefel 2.22 | [−10, 10] | 30 | 0 |
| F3 Schwefel 1.2 | [−100, 100] | 30 | 0 |
| F4 Schwefel 2.21 | [−100, 100] | 30 | 0 |
| F5 Generalized Rosenbrock | [−30, 30] | 30 | 0 |
| F6 Step Function | [−100, 100] | 30 | 0 |
| F7 Quartic | [−1.28, 1.28] | 30 | 0 |
| F8 Schwefel 2.26 | [−500, 500] | 30 | −12,569.5 |
| F9 Rastrigin | [−5.12, 5.12] | 30 | 0 |
| F10 Ackley | [−32, 32] | 30 | 0 |
| F11 Griewank | [−600, 600] | 30 | 0 |
| F12 Generalized Penalized Function 1 | [−50, 50] | 30 | 0 |
| F13 Generalized Penalized Function 2 | [−50, 50] | 30 | 0 |
| F14 Shekel’s Foxholes | [−65.53, 65.53] | 2 | 1 |
| F15 Kowalik | [−5, 5] | 4 | 0.0003075 |
| F16 Six-Hump Camel-Back | [−5, 5] | 2 | −1.031628 |
| F17 Branin | lb = [−5, 0] ub = [10, 15] | 2 | 0.398 |
| F18 Goldstein-Price | [−2, 2] | 2 | 3 |
| F19 Hartman’s Family n = 3 | [0, 1] | 3 | −3.98 |
| F20 Hartman’s Family n = 6 | [0, 1] | 6 | −3.32 |
| F21 Shekel’s Family m = 5 | [0, 1] | 4 | −10.536 |
| F22 Shekel’s Family m = 7 | [0, 10] | 4 | −10.536 |
| F23 Shekel’s Family m = 10 | [0, 10] | 4 | −10.536 |
| Algorithm | Parameter |
|---|---|
| ISSA | = 30, = 0.2, = 0.8, = 0.1 |
| SSA | = 30, = 0.2, = 0.8, = 0.1 |
| NGO | = 30, = 0.9, |
| DBO | = 30, = 0.1, = 0.1, = 0.3, = 0.5 |
| GWO | = 30, = [0, 2] |
| GWCA | = 30, = 1, = 8.3, = 9.8, = 3, = 0.1, = 9, = 6 |
| WOA | = 30, = 1, = 1 |
| SABO | = 30 |
| RIME | = 30, |
| Function Name | DBO | GWO | GWCA | WOA | SABO | RIME | NGO | SSA | ISSA | |
|---|---|---|---|---|---|---|---|---|---|---|
| F1 | mean | 9.39 10−112 | 8.59 10−28 | 9.62 10−3 | 2.05 10−63 | 5.78 10−197 | 1.9668 | 1.81 10−87 | 1.33 10−61 | 3.99 10−262 |
| std | 4.84 10−111 | 1.15 10−27 | 2.21 10−3 | 9.21 10−63 | 0 | 0.79139 | 5.84 10−87 | 7.17 10−61 | 0 | |
| best | 7.34 10−168 | 1.52 10−29 | 4.39 10−6 | 9.23 10−74 | 6.39 10−201 | 1.0675 | 3.99 10−90 | 6.54 10−161 | 0 | |
| worst | 2.65 10−110 | 4.97 10−27 | 9.21 10−2 | 4.98 10−62 | 7.94 10−196 | 4.0912 | 3.23 10−86 | 3.93 10−60 | 8.06 10−261 | |
| median | 2.99 10−135 | 4.21 10−28 | 4.47 10−4 | 3.58 10−67 | 5.20 10−198 | 1.8376 | 3.14 10−88 | 1.24 10−76 | 9.71 10−297 | |
| F2 | mean | 6.60 10−57 | 9.93 10−17 | 0.76209 | 2.15 10−36 | 9.22 10−111 | 1.459 | 9.53 10−46 | 2.50 10−29 | 1.96 10−136 |
| std | 3.51 10−56 | 7.75 10−17 | 1.6517 | 5.35 10−36 | 3.02 10−110 | 1.0507 | 6.08 10−46 | 1.19 10−28 | 1.07 10−135 | |
| best | 3.19 10−79 | 1.70 10−17 | 0.00094916 | 6.91 10−40 | 1.64 10−112 | 0.47875 | 1.92 10−46 | 8.49 10−90 | 4.68 10−174 | |
| worst | 1.92 10−55 | 3.62 10−16 | 7.0488 | 2.74 10−35 | 1.65 10−109 | 5.2636 | 2.12 10−45 | 6.53 10−28 | 5.89 10−135 | |
| median | 1.62 10−68 | 8.22 10−17 | 0.099576 | 1.37 10−37 | 1.03 10−111 | 1.1931 | 7.83 10−46 | 8.12 10−40 | 3.10 10−152 | |
| F3 | mean | 1.47 10−44 | 5.33 10−6 | 2244.3776 | 8448.6005 | 1.96 10−16 | 1369.3627 | 1.76 10−21 | 4.43 10−26 | 3.43 10−226 |
| std | 8.07 10−44 | 8.56 10−6 | 1329.0103 | 17,620.2865 | 1.07 10−15 | 429.6009 | 8.32 10−21 | 2.16 10−25 | 0 | |
| best | 1.98 10−155 | 1.81 10−9 | 446.7755 | 8.51 10−15 | 3.77 10−93 | 772.551 | 2.05 10−28 | 9.23 10−85 | 1.92 10−298 | |
| worst | 4.42 10−43 | 4.41 10−5 | 1931.0912 | 80,147.4375 | 5.88 10−15 | 2546.0483 | 4.55 10−20 | 1.18 10−24 | 1.02 10−224 | |
| median | 3.79 10−105 | 3.38 10−6 | 6780.7869 | 461.7524 | 1.99 10−60 | 1296.4459 | 3.16 10−24 | 7.77 10−37 | 5.41 10−261 | |
| F4 | mean | 1.59 10−50 | 5.57 10−7 | 19.7814 | 0.0022505 | 4.92 10−77 | 7.0876 | 1.91 10−37 | 6.57 10−27 | 5.62 10−128 |
| std | 8.72 10−50 | 3.51 10−7 | 4.3306 | 0.0042854 | 1.07 10−76 | 3.3242 | 1.87 10−37 | 3.60 10−26 | 3.02 10−127 | |
| best | 1.07 10−81 | 5.85 10−8 | 27.902 | 2.11 10−7 | 8.39 10−79 | 2.0849 | 2.06 10−38 | 0 | 2.85 10−156 | |
| worst | 4.77 10−49 | 1.42 10−6 | 27.3122 | 0.018345 | 5.37 10−76 | 13.5455 | 6.57 10−37 | 1.97 10−25 | 1.65 10−126 | |
| median | 9.99 10−65 | 4.86 10−7 | 38.6198 | 3.29 10−4 | 1.26 10−77 | 6.0807 | 1.07 10−37 | 7.05 10−36 | 1.86 10−142 | |
| F5 | mean | 25.75 | 27.1879 | 320.7621 | 0.19366 | 28.4004 | 437.163 | 25.9039 | 3.58 10−5 | 1.07 10−6 |
| std | 0.21424 | 0.85872 | 341.0196 | 0.26607 | 0.37114 | 500.128 | 0.34525 | 6.52 10−5 | 3.26 10−6 | |
| best | 25.3382 | 25.9722 | 84.6814 | 3.62 10−6 | 27.6297 | 77.0943 | 24.9708 | 3.23 10−9 | 2.85 10−25 | |
| worst | 26.5107 | 28.769 | 1925.8737 | 1.1366 | 28.8586 | 1930.9445 | 26.4504 | 2.25 10−4 | 1.52 10−5 | |
| median | 25.7159 | 27.1313 | 187.4818 | 0.062476 | 28.5784 | 208.3892 | 25.9212 | 4.70 10−6 | 2.50 10−14 | |
| F6 | mean | 9.54 10−3 | 0.74849 | 1.91 10−2 | 6.31 10−3 | 2.5388 | 2.0549 | 5.90 10−4 | 9.38 10−12 | 1.06 10−14 |
| std | 4.84 10−2 | 0.44364 | 9.41 10−2 | 7.66 10−3 | 0.70133 | 0.77482 | 9.96 10−4 | 2.44 10−11 | 5.59 10−14 | |
| best | 1.70 10−6 | 4.57 10−5 | 2.77 10−6 | 7.38 10−5 | 0.8522 | 0.71478 | 8.58 10−7 | 1.44 10−14 | 6.41 10−24 | |
| worst | 0.26518 | 1.7456 | 0.51592 | 3.29 10−2 | 4.0982 | 3.7398 | 4.11 10−3 | 1.18 10−10 | 3.06 10−13 | |
| median | 9.17 10−5 | 0.73947 | 2.79 10−4 | 2.98 10−3 | 2.4158 | 2.0292 | 2.38 10−4 | 47.71 10−13 | 6.36 10−18 | |
| F7 | mean | 1.21 10−3 | 1.80 10−3 | 1.4846 | 8.59 10−4 | 1.19 10−4 | 0.04276 | 5.08 10−4 | 1.78 10−3 | 7.59 10−4 |
| std | 9.64 10−4 | 9.79 10−4 | 0.63634 | 1.51 10−3 | 8.33 10−5 | 0.017635 | 2.37 10−4 | 1.36 10−3 | 4.99 10−4 | |
| best | 9.90 10−5 | 5.24 10−4 | 0.3052 | 1.58 10−5 | 9.85 10−6 | 0.014542 | 7.27 10−5 | 1.73 10−4 | 8.87 10−7 | |
| worst | 3.40 10−3 | 4.71 10−3 | 3.1716 | 7.33 10−3 | 3.58 10−4 | 0.083719 | 1.06 10−3 | 6.65 10−3 | 1.99 10−3 | |
| median | 8.58 10−4 | 1.54 10−3 | 1.3275 | 2.80 10−4 | 9.69 10−5 | 0.040291 | 4.88 10−4 | 1.58 10−3 | 6.63 10−4 | |
| Function Name | DBO | GWO | GWCA | WOA | SABO | RIME | NGO | SSA | ISSA | |
|---|---|---|---|---|---|---|---|---|---|---|
| F8 | mean | −8701.6518 | −5962.9142 | −7326.0442 | −12,520.058 | −3046.0754 | −10,031.3763 | −7370.6748 | −8710.4366 | −10,546.595 |
| std | 1536.4065 | 1088.7869 | 672.2149 | 212.389 | 429.4755 | 454.5367 | 570.973 | 611.253 | 1600.8078 | |
| best | −12,224.1201 | −7658.8421 | −8612.3715 | −12,569.4866 | −4184.9217 | −10,916.8954 | −9632.8237 | −9801.3347 | −12,569.4866 | |
| worst | −6332.7066 | −3218.494 | −5264.5562 | −11,449.6129 | −2484.7529 | −8965.0533 | −7367.174 | −7701.3047 | −8307.1842 | |
| median | −8327.171 | −6113.4139 | −7326.4124 | −12,569.4361 | −2992.0223 | −10,065.0948 | −7367.174 | −8721.4395 | −10,472.5097 | |
| F9 | mean | 0.099857 | 3.5357 | 60.1949 | 1.89 10−15 | 0 | 62.4197 | 0 | 0 | 0 |
| std | 0.54694 | 5.7095 | 20.2894 | 1.03 10−14 | 0 | 12.9842 | 0 | 0 | 0 | |
| best | 0 | 0 | 26.8639 | 0 | 0 | 28.3564 | 0 | 0 | 0 | |
| worst | 2.9957 | 27.8712 | 101.4854 | 5.68 10−14 | 0 | 84.343 | 0 | 0 | 0 | |
| median | 0 | 4.63 10−12 | 61.1898 | 0 | 0 | 59.5512 | 0 | 0 | 0 | |
| F10 | mean | 4.44 10−16 | 9.86 10−14 | 10.7485 | 3.76 10−15 | 3.9968 10−15 | 2.0771 | 5.41 10−15 | 4.44 10−16 | 4.44 10−16 |
| std | 0 | 1.49 10−14 | 2.0209 | 2.27 10−15 | 0 | 0.5365 | 1.77 10−15 | 0 | 0 | |
| best | 4.44 10−16 | 7.50 10−14 | 5.473 | 4.44 10−16 | 3.99 10−15 | 0.75586 | 3.99 10−15 | 4.44 10−16 | 4.44 10−16 | |
| worst | 4.44 10−16 | 1.28 10−13 | 14.7352 | 7.54 10−16 | 3.9968 10−15 | 3.1255 | 7.54 10−15 | 4.44 10−16 | 4.44 10−16 | |
| median | 4.44 10−16 | 9.99 10−14 | 10.7861 | 3.99 10−15 | 3.9968 10−15 | 2.1323 | 3.99 10−15 | 4.44 10−16 | 4.44 10−16 | |
| F11 | mean | 0 | 5.09 10−3 | 1.0888 | 0 | 0 | 0.97002 | 0 | 0 | 0 |
| std | 0 | 1.08 10−2 | 1.4707 | 0 | 0 | 0.053822 | 0 | 0 | 0 | |
| best | 0 | 0 | 0.01026 | 0 | 0 | 0.84559 | 0 | 0 | 0 | |
| worst | 0 | 4.76 10−2 | 5.5992 | 0 | 0 | 1.0393 | 0 | 0 | 0 | |
| median | 0 | 0 | 0.43747 | 0 | 0 | 0.98059 | 0 | 0 | 0 | |
| F12 | mean | 1.70 10−5 | 0.045456 | 6.5837 | 4.16 10−4 | 0.27779 | 3.1901 | 2.26 10−4 | 2.22 10−12 | 6.97 10−19 |
| std | 2.72 10−5 | 0.022784 | 3.7344 | 5.16 10−4 | 0.16756 | 1.3387 | 1.21 10−3 | 4.94 10−12 | 3.60 10−18 | |
| best | 7.05 10−8 | 0.013342 | 0.1498 | 5.28 10−6 | 0.11111 | 0.5982 | 1.38 10−7 | 2.07 10−15 | 2.44 10−32 | |
| worst | 0.0001187 | 0.102 | 14.473 | 2.29 10−3 | 0.94211 | 5.9181 | 6.62 10−3 | 1.99 10−11 | 1.97 10−17 | |
| median | 6.51 10−6 | 0.042712 | 6.1956 | 1.91 10−4 | 0.24347 | 3.3092 | 4.02 10−6 | 1.44 10−13 | 8.62 10−24 | |
| F13 | mean | 0.75689 | 0.6581 | 14.9114 | 6.16 10−3 | 2.5375 | 0.23964 | 0.33124 | 1.54 10−11 | 4.70 10−17 |
| std | 0.48984 | 0.23023 | 7.0883 | 8.05 10−3 | 0.58422 | 0.12762 | 0.22137 | 2.62 10−11 | 2.27 10−16 | |
| best | 0.09966 | 0.13345 | 2.1393 | 6.44 10−5 | 1.4763 | 0.053259 | 0.014171 | 1.51 10−14 | 1.41 10−31 | |
| worst | 2.1934 | 1.0985 | 30.4566 | 3.16 10−2 | 3.0286 | 0.5779 | 0.75713 | 1.11 10−10 | 1.24 10−15 | |
| median | 0.61844 | 0.66773 | 14.5231 | 3.11 10−3 | 2.9364 | 0.21828 | 0.28106 | 5.84 10−12 | 4.55 10−23 | |
| Function Name | DBO | GWO | GWCA | WOA | SABO | RIME | NGO | SSA | ISSA | |
|---|---|---|---|---|---|---|---|---|---|---|
| F14 | mean | 1.2954 | 4.5218 | 1.0643 | 1.5587 | 3.9472 | 0.998 | 1.1303 | 5.2195 | 0.998 |
| std | 0.78737 | 4.2943 | 0.25219 | 1.2875 | 3.0438 | 3.49 10−12 | 0.50338 | 5.4117 | 5.83 10−17 | |
| best | 0.998 | 0.998 | 0.998 | 0.998 | 0.99841 | 0.998 | 0.998 | 0.998 | 0.998 | |
| worst | 3.9683 | 12.6705 | 1.992 | 5.9288 | 12.6705 | 0.998 | 2.9821 | 12.6705 | 0.998 | |
| median | 0.998 | 2.9821 | 0.998 | 0.998 | 2.9949 | 0.998 | 0.998 | 0.998 | 0.998 | |
| F15 | mean | 7.48 10−4 | 3.08 10−3 | 1.12 10−3 | 5.64 10−4 | 7.44 10−4 | 4.13 10−3 | 3.08 10−4 | 3.46 10−4 | 3.37 10−4 |
| std | 3.79 10−4 | 6.89 10−3 | 3.65 10−3 | 5.12 10−4 | 6.68 10−4 | 7.39 10−3 | 2.97 10−7 | 8.99 10−5 | 8.16 10−5 | |
| best | 3.07 10−4 | 3.08 10−4 | 3.07 10−4 | 3.17 10−4 | 3.19 10−4 | 3.11 10−4 | 3.07 10−4 | 3.07 10−4 | 3.07 10−4 | |
| worst | 1.54 10−3 | 2.03 10−2 | 2.04 10−2 | 2.25 10−3 | 3.34 10−3 | 2.04 10−2 | 3.08 10−4 | 5.71 10−4 | 6.41 10−4 | |
| median | 7.49 10−4 | 3.82 10−4 | 3.08 10−4 | 3.78 10−4 | 4.55 10−4 | 7.72 10−4 | 3.07 10−4 | 3.07 10−4 | 3.07 10−4 | |
| F16 | mean | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0258 | −1.0316 | −1.0316 | −1.0316 | −1.0316 |
| std | 6.04 10−16 | 3.00 10−8 | 6.45 10−16 | 6.47 10−8 | 0.0138 | 3.55 10−7 | 6.38 10−16 | 5.60 10−16 | 5.29 10−16 | |
| best | 1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | |
| worst | −1.0316 | −1.0316 | −1.0316 | −1.0316 | −0.95709 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | |
| median | −1.0316 | −1.03166 | −1.0316 | −1.0316 | −1.0303 | −1.0316 | −1.0316 | −1.0316 | −1.0316 | |
| F17 | mean | 0.39789 | 0.39789 | 0.39789 | 0.39794 | 0.44857 | 0.39789 | 0.39789 | 0.39789 | 0.39789 |
| std | 0 | 2.37 10−6 | 0 | 8.18 10−5 | 0.09735 | 5.22 10−7 | 0 | 0 | 0 | |
| best | 0.39789 | 0.39789 | 0.39789 | 0.39789 | 0.39794 | 0.39789 | 0.39789 | 0.39789 | 0.39789 | |
| worst | 0.39789 | 0.39789 | 0.39789 | 0.39816 | 0.71491 | 0.39789 | 0.39789 | 0.39789 | 0.39789 | |
| median | 0.39789 | 0.39789 | 0.39789 | 0.39789 | 0.40278 | 0.39789 | 0.39789 | 0.39789 | 0.39789 | |
| F18 | mean | 3 | 3 | 3 | 5.7034 | 4.8679 | 8.4 | 3 | 5.7 | 3 |
| std | 1.30 10−10 | 3.85 10−5 | 1.80 10−15 | 8.2487 | 4.4462 | 20.5504 | 1.11 10−15 | 8.2385 | 1.30 10−15 | |
| best | 3 | 3 | 3 | 3 | 3.0013 | 3 | 3 | 3 | 3 | |
| worst | 3 | 3.0002 | 3 | 30.0474 | 25.8388 | 84 | 3 | 30 | 3 | |
| median | 3 | 3 | 3 | 3 | 3.1489 | 3 | 3 | 3 | 3 | |
| F19 | mean | −3.8612 | −3.8619 | −3.8628 | −3.8109 | −3.6273 | −3.8628 | −3.8628 | −3.8628 | −3.8628 |
| std | 0.0032065 | 0.0020026 | 2.53 10−15 | 0.063631 | 0.12864 | 3.65 10−7 | 2.68 10−15 | 2.20 10−15 | 2.23 10−15 | |
| best | −3.8628 | −3.8628 | −3.8628 | −3.8628 | −3.8459 | −3.8628 | −3.8628 | −3.8628 | −3.8628 | |
| worst | −3.8549 | −3.8551 | −3.8628 | −3.6106 | −3.3468 | −3.8628 | −3.8628 | −3.8628 | −3.8628 | |
| median | −3.8628 | −3.8626 | −3.8628 | −3.8371 | −3.6312 | −3.8628 | −3.8628 | −3.8628 | −3.8628 | |
| F20 | mean | −3.2247 | −3.2656 | −3.2824 | −3.0891 | −3.2291 | −3.2467 | −3.2824 | −3.2744 | −3.322 |
| std | 0.11556 | 0.068509 | 0.057005 | 0.17479 | 0.12286 | 0.058275 | 0.057005 | 0.059241 | 1.17 10−15 | |
| best | −3.322 | −3.322 | −3.322 | −3.3143 | −3.3209 | −3.322 | −3.322 | −3.322 | −3.322 | |
| worst | −2.8404 | −3.0904 | −3.2031 | −2.4059 | −2.8765 | −3.203 | −3.2031 | −3.2031 | −3.322 | |
| median | −3.2031 | −3.322 | −3.322 | −3.1332 | −3.2692 | −3.2031 | −3.322 | −3.322 | −3.322 | |
| F21 | mean | −6.7714 | −9.1118 | −5.5709 | −10.0417 | −5.0932 | −8.3842 | −10.1532 | −7.6042 | −10.1532 |
| std | 2.4299 | 2.1192 | 3.4081 | 0.18435 | 0.28311 | 2.5794 | 4.83 10−6 | 2.5926 | 5.36 10−15 | |
| best | −10.1532 | −10.1527 | −10.1532 | −10.1532 | −6.5842 | −10.1531 | −10.1532 | −10.1532 | −10.1532 | |
| worst | −5.0551 | −4.3089 | −2.6305 | −9.312 | −4.9072 | −2.6304 | −10.1532 | −5.0552 | −10.1532 | |
| median | −5.1008 | −10.1516 | −3.869 | −10.0969 | −5.0529 | −10.1523 | −10.1532 | −7.6042 | −10.1532 | |
| F22 | mean | −8.1267 | −10.4017 | −6.7233 | −10.151 | −5.069 | −8.5179 | −10.4029 | −9.5171 | −10.4029 |
| std | 2.8877 | 0.00077288 | 3.6027 | 1.0223 | 0.90107 | 2.9738 | 5.84 10−6 | 2.0147 | 8.72 10−16 | |
| best | −10.4029 | −10.4027 | −10.4029 | −10.4 | −7.4215 | −10.4029 | −10.4029 | −10.4029 | −10.4029 | |
| worst | −2.7646 | −10.3994 | −1.8376 | −4.745 | −2.9267 | −2.7657 | −10.4029 | −5.0877 | −10.4029 | |
| median | −10.3931 | −10.4018 | −5.1288 | −10.3386 | −5.0741 | −10.402 | −10.4029 | −10.4029 | −10.4029 | |
| F23 | mean | −7.8152 | −10.3562 | −6.4768 | −10.4201 | −5.0301 | −9.7419 | −10.5364 | −9.2345 | −10.5364 |
| std | 3.0238 | 0.97888 | 3.6423 | 0.1815 | 1.2402 | 2.093 | 2.92 10−6 | 2.3142 | 1.77 10−15 | |
| best | −10.5364 | −10.5363 | −10.5364 | −10.5363 | −10.1396 | −10.5364 | −10.5364 | −10.5364 | −10.5364 | |
| worst | −2.4273 | −5.1734 | −2.4273 | −9.851 | −3.4551 | −2.8066 | −10.5364 | −5.1285 | −10.5364 | |
| median | −10.5266 | −10.5349 | −4.482 | −10.5044 | −5.0483 | −10.5357 | −10.5364 | −10.5364 | −10.5364 | |
| NB | NM | NS | ZO | PS | PM | PB | ||
| NB | PB | PB | PM | PM | PM | ZO | ZO | |
| NM | PB | PB | PM | PS | PS | ZO | NS | |
| NS | PM | PM | PM | PS | ZO | NS | NS | |
| ZO | PM | PM | PS | ZO | NS | NM | NM | |
| PS | PS | PS | ZO | NS | NS | NM | NM | |
| PM | PS | ZO | NS | NM | NM | NM | NB | |
| PB | ZO | ZO | NM | NM | NM | NB | NB | |
| NB | NM | NS | ZO | PS | PM | PB | ||
| NB | NB | NB | NM | NM | NM | NS | ZO | |
| NM | NB | NB | NM | NS | NS | NS | ZO | |
| NS | NB | NM | NS | NS | ZO | ZO | PS | |
| ZO | NM | NM | NS | ZO | PS | PS | PM | |
| PS | NM | NS | ZO | PS | PS | PS | PM | |
| PM | NM | ZO | PS | PS | PM | PM | PB | |
| PB | ZO | ZO | PS | PM | PM | PB | PB | |
| NB | NM | NS | ZO | PS | PM | PB | ||
| NB | NS | PS | PB | PB | PB | PM | NS | |
| NM | NS | PS | PB | PM | PM | PS | ZO | |
| NS | ZO | PS | PM | PM | PS | NS | ZO | |
| ZO | ZO | PS | PS | PS | PS | PS | ZO | |
| PS | ZO | ZO | ZO | ZO | ZO | ZO | PM | |
| PM | PM | PS | PS | PS | PS | PS | PM | |
| PB | NB | NM | NM | NM | NS | NS | ZO | |
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Mass of the trolley | 8 | kg | |
| Mass of the payload | 8 | kg | |
| Length of the payload’s cable | 4 | m | |
| Damping coefficient | 0.2 | Ns/m | |
| Gravitational acceleration | 9.8 | m/s2 |
| Controller | Trolley Position | Payload Swing Angle | ||||
|---|---|---|---|---|---|---|
| Peak Time (s) | Overshoot (%) | Steady State Time (s) | Steady-State Value (m) | Max Angle (rad) | Steady State Time (s) | |
| PID | 4.402 | 27.4% | 18.946 | 9.927 | 0.0439 | 21.563 |
| FPID | 4.728 | 18.9% | 17.054 | 9.947 | 0.0356 | 17.554 |
| VUFPID | 7.207 | 6.9% | 13.272 | 1.004 | 0.0126 | 16.390 |
| Controller | Trolley Position | Payload Swing Angle | ||||
|---|---|---|---|---|---|---|
| Peak Time (s) | Overshoot (%) | Steady State Time (s) | Steady-State Value (m) | Max Angle (rad) | Steady State Time (s) | |
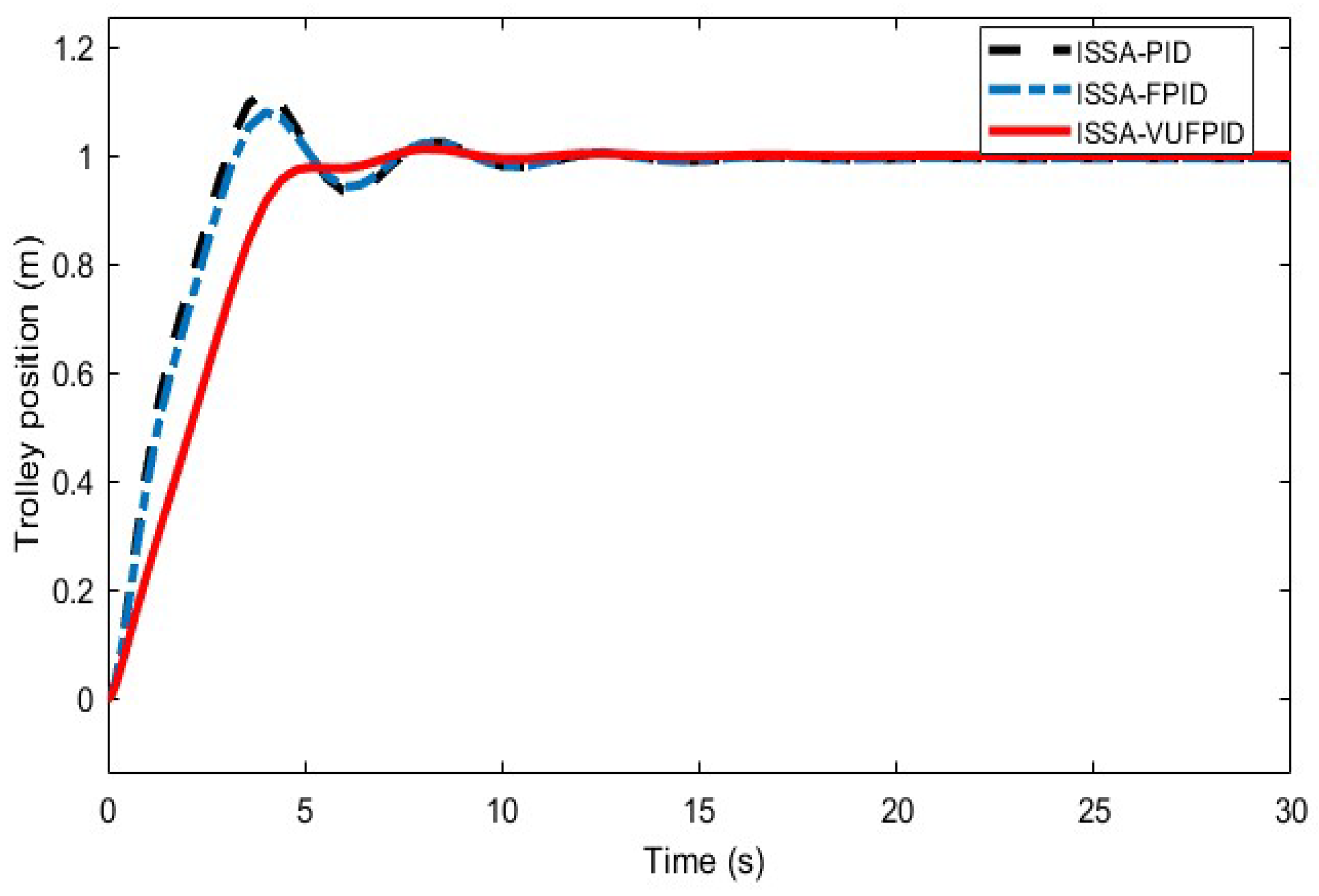
| ISSA-PID | 4.093 | 14.8% | 14.172 | 0.991 | 0.0568 | 15.359 |
| ISSA-FPID | 4.046 | 10.7% | 13.699 | 0.996 | 0.0532 | 13.356 |
| ISSA-VUFPID | 5.181 | 0% | 5.371 | 0.997 | 0.0282 | 5.384 |
| Working Condition | Trolley Mass (kg) | Payload Mass (kg) | Cable Length (m) | Damping Coefficient (Ns/m) | Gravitational Acceleration (m/s2) |
|---|---|---|---|---|---|
| 1 | 8 | 8 | 2 | 0.2 | 9.8 |
| 2 | 8 | 6 | 4 | 0.2 | 9.8 |
| 3 | 6 | 8 | 4 | 0.2 | 9.8 |
| 4 | 4 | 8 | 4 | 0.2 | 9.8 |
| 5 | 8 | 8 | 6 | 0.2 | 9.8 |
| Working Condition | Improved PID Controller | Trolley Position | Payload Swing Angle | ||||
|---|---|---|---|---|---|---|---|
| Peak Time (s) | Overshoot (%) | Steady-State Time (s) | Steady-State Value (m) | Max Angle (rad) | Steady State Time (s) | ||
| 1 | ISSA-PID | 3.703 | 10.2% | 9.905 | 0.9964 | 0.0629 | 10.763 |
| ISSA-FPID | 3.892 | 6.1% | 9.082 | 0.9961 | 0.0577 | 10.310 | |
| ISSA-VUFPID | 5.102 | 2.1% | 7.333 | 1.0000 | 0.0281 | 9.902 | |
| 2 | ISSA-PID | 3.987 | 15.1% | 12.909 | 0.9953 | 0.0753 | 13.855 |
| ISSA-FPID | 12.503 | 10.8% | 12.351 | 0.9961 | 0.0688 | 13.107 | |
| ISSA-VUFPID | 8.861 | 0% | 7.879 | 1.0000 | 0.0388 | 10.631 | |
| 3 | ISSA-PID | 3.988 | 15.2% | 13.821 | 0.9954 | 0.0598 | 15.485 |
| ISSA-FPID | 4.038 | 11.1% | 13.370 | 0.9960 | 0.0562 | 13.610 | |
| ISSA-VUFPID | 4.992 | 0% | 5.393 | 1.0000 | 0.0287 | 7.920 | |
| 4 | ISSA-PID | 3.975 | 13.6% | 14.420 | 0.9952 | 0.0594 | 2.856 |
| ISSA-FPID | 3.917 | 9.7% | 13.839 | 0.9962 | 0.0598 | 2.817 | |
| ISSA-VUFPID | 5.193 | 0% | 7.631 | 1.0000 | 0.0295 | 3.012 | |
| 5 | ISSA-PID | 3.994 | 11.6% | 16.144 | 0.9951 | 0.0882 | 19.113 |
| ISSA-FPID | 4.031 | 7.9% | 15.731 | 0.9965 | 0.0814 | 18.591 | |
| ISSA-VUFPID | 6.881 | 1.3% | 9.281 | 1.0000 | 0.0405 | 12.748 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Liu, L.; He, D. Application of Variable Universe Fuzzy PID Controller Based on ISSA in Bridge Crane Control. Electronics 2024, 13, 3534. https://doi.org/10.3390/electronics13173534
Zhang Y, Liu L, He D. Application of Variable Universe Fuzzy PID Controller Based on ISSA in Bridge Crane Control. Electronics. 2024; 13(17):3534. https://doi.org/10.3390/electronics13173534
Chicago/Turabian StyleZhang, Youyuan, Lisang Liu, and Dongwei He. 2024. "Application of Variable Universe Fuzzy PID Controller Based on ISSA in Bridge Crane Control" Electronics 13, no. 17: 3534. https://doi.org/10.3390/electronics13173534