
Research on Space Operation Control of Air Float Satellite Simulator Based on Constraints Aware Particle Filtering-Nonlinear Model Predictive Control


Abstract
1. Introduction
- This paper presents the design of a ground-based air float satellite simulation device, which is intended to emulate the movement of satellites in space. The device was constructed with meticulous attention to detail, with specific parameters delineating the hardware and software layers.
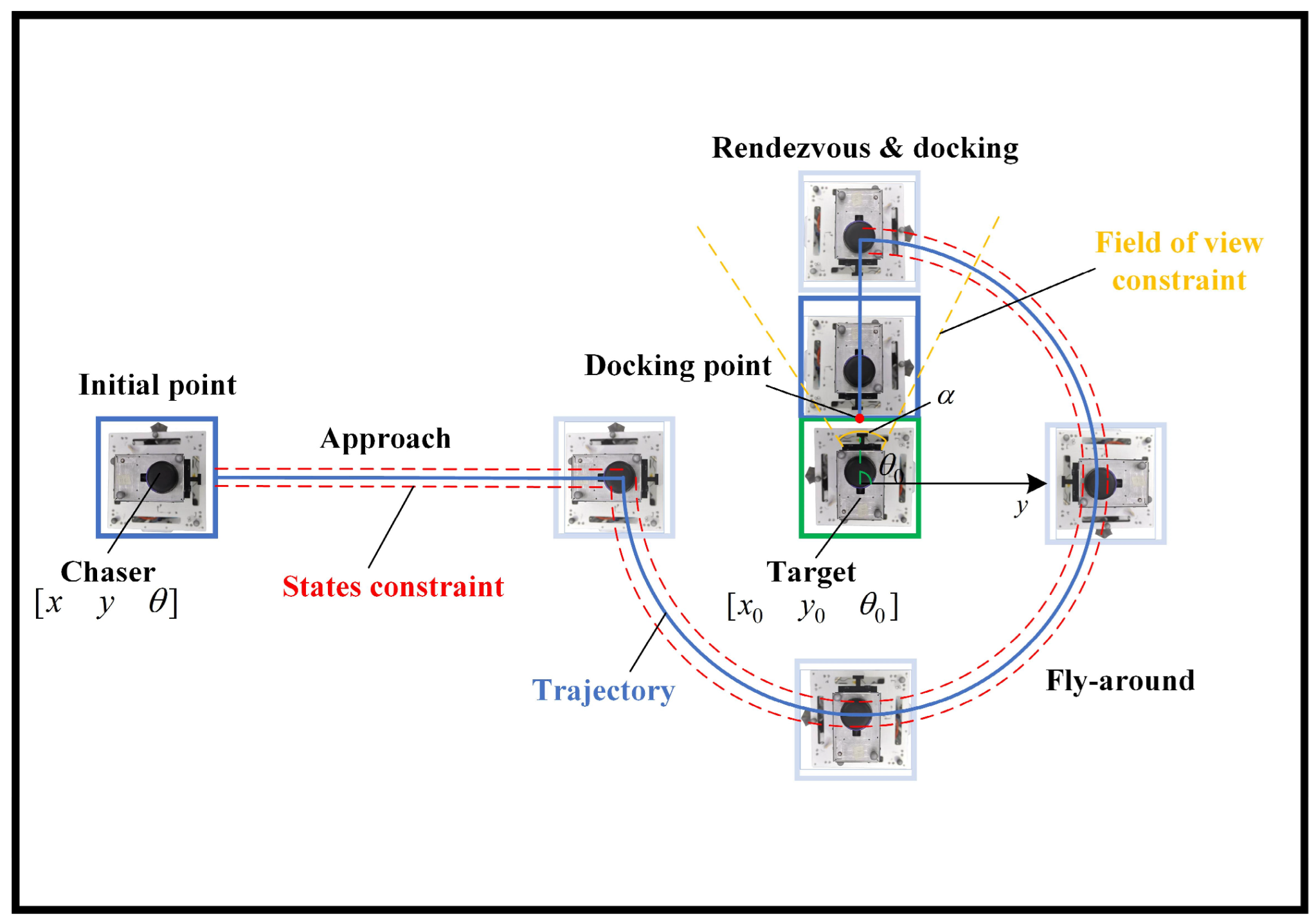
- Furthermore, this paper introduces a novel sampling-based model predictive control method, which has been developed for the purpose of the ground simulation of rendezvous and docking. Docking is a real-time, optimal, and constraint-handling capability that is capable of handling multiple constraints.
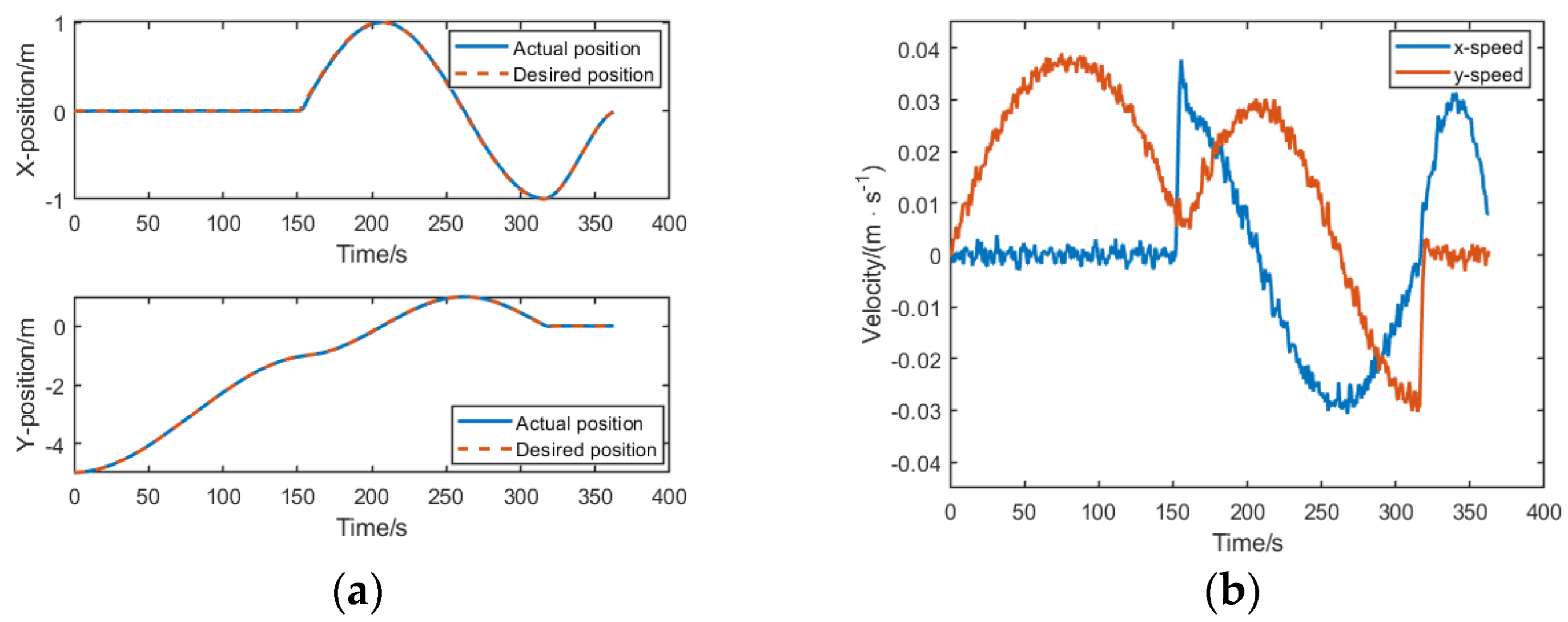
- The CAPF-NMPC method is validated by an air float satellite simulator in a real environment, which proves its high control accuracy and low consumption of computational resources.
2. The Air Float Satellite Simulator
2.1. Overall Structure Design
2.2. GNC Software Architecture Design
2.3. Dynamical Model
3. Controller Design
3.1. Optimal Control Modeling
3.1.1. Objective Function
3.1.2. Attitude Alignment Constraint
3.1.3. Velocity Constraint
3.1.4. Field of View Constraint
3.1.5. Thrust Saturation Constraint
3.2. Optimization Controller by CAPF-NMPC
3.3. Thrust Distribution Method
4. Simulation Verification
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Do, P.X.; Nakasuka, S. LEO-to-GEO laser communication-An enhancement of the communication capability of micro/nano-satellites. AIP Conf. Proc. 2021, 2366, 010001. [Google Scholar]
- Sansone, F.; Francesconi, A.; Corvaja, R.; Vallone, G.; Antonello, R.; Branz, F.; Villoresi, P. LaserCube optical communication terminal for nano and micro satellites. Acta Astronaut. 2020, 173, 310–319. [Google Scholar] [CrossRef]
- Radhakrishnan, R.; Edmonson, W.W.; Afghah, F.; Rodriguez-Osorio, R.M.; Pinto, F.; Burleigh, S.C. Survey of Inter-Satellite Communication for Small Satellite Systems: Physical Layer to Network Layer View. IEEE Commun. Surv. Tutorials 2016, 18, 2442–2473. [Google Scholar] [CrossRef]
- Xue, Y.; Li, Y.; Guang, J.; Zhang, X.; Guo, J. Small satellite remote sensing and applications–history, current and future. Int. J. Remote Sens. 2008, 29, 4339–4372. [Google Scholar] [CrossRef]
- Yao, Y.; Zhou, Y.; Yuan, C.; Li, Y.; Zhang, H. On-board intelligent processing for remote sensing images based on 20 kg micro-nano satellite. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021. [Google Scholar]
- Liu, H.; Liu, C.; Liu, S.; Yong, Q.; Wang, X.; Zhao, Y.; Ding, Y.; Xie, P. Design of a focusing system for micro-nano satellite remote sensing camera based on thermal control technology. J. Therm. Stress. 2024, 47, 909–926. [Google Scholar] [CrossRef]
- Liu, Y.; Tian, L.; Liu, G.; Li, Z.; Dai, Y.; Dong, Z. Regional Navigation Reconstruction Strategy and Performance Simulation Based on Micro-nano Satellites. In Proceedings of the 2021 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Glasgow, UK, 17–20 May 2021. [Google Scholar]
- You, Z. Space Microsystems and Micro/nano Satellites; Butterworth-Heinemann: Oxford, UK, 2017. [Google Scholar]
- David, R.V. Design of a Thruster-Assisted Control for 1U CubeSat Orbit Maintenance and Drag Mitigation with NASA 42. Bachelor’s Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2023. [Google Scholar]
- Xu, S.; Liao, W. Large angle attitude control of cubesat based on multi-objective optimization. J. Phys. Conf. Ser. 2024, 2820, 012050. [Google Scholar] [CrossRef]
- Yuan, B.; Yang, D.; Meng, Z. Research on Sun-Oriented Spin-Stabilized Attitude Control of Micro/Nano Satellite Using Only Magnetic Control. Electronics 2023, 12, 362. [Google Scholar] [CrossRef]
- Xu, S.; Lu, Z.; Zhang, X.; Liao, W. Attitude stability control of micro-nano satellite orbit maneuver based on bias momentum. J. Phys. Conf. Ser. 2021, 2083, 022060. [Google Scholar] [CrossRef]
- Domenico, P. Mission Analysis for CubeSat Rendezvous and Docking Operations. Master’s Thesis, Politecnico di Torino, Turin, Italy, 2023. [Google Scholar]
- Hu, Y.; Han, D.; Lu, Z.; Liao, W. Constraint tightening-based control for small-satellite formations using differential aerodynamic forces. Adv. Space Res. 2024, 74, 872–889. [Google Scholar] [CrossRef]
- Jeon, S.; Park, S.-Y.; Kim, G.-N. Relative Orbit Control Algorithms and Scenarios for the Inertial Alignment Hold Demonstration Mission by CubeSat Formation Flying. Aerospace 2024, 11, 135. [Google Scholar] [CrossRef]
- Wang, C.; Chen, D.; Liao, W. Research on maneuver strategy in satellite observation and counter-observation game. Adv. Space Res. 2024, 74, 3170–3185. [Google Scholar] [CrossRef]
- Chekakta, Z.; Aouf, N. CaDNET: An End-to-End Plenoptic Camera-Based Deep Learning Pose Estimation Approach for Space Orbital Rendezvous. IEEE Sens. J. 2024. [Google Scholar] [CrossRef]
- Sandnas, M.; Spencer, D.B. RVS® 3000-3D LIDAR–3D imaging and pose estimation during first geo satellite servicing. In Proceedings of the 44th Annual American Astronautical Society Guidance, Navigation, and Control Conference, 2022; Springer International Publishing: Cham, Switzerland, 2022. [Google Scholar]
- Zeng, N.; Xu, G.; Chen, D.; Liu, X.; Lu, Z. A time-fuel hybrid optimal guidance for micro/nano satellite’s glideslope approach. J. Phys. Conf. Ser. 2024, 2764, 012046. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Zhu, Z.H. Adaptive sliding mode disturbance observer-based control for rendezvous with non-cooperative spacecraft. Acta Astronaut. 2021, 183, 59–74. [Google Scholar] [CrossRef]
- Wang, C.; Chen, D.; Liao, W.; Liang, Z. Autonomous obstacle avoidance strategies in the mission of large space debris removal using potential function. Adv. Space Res. 2023, 72, 2860–2873. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, Y.; Xu, Z. Optimal guidance and collision avoidance for docking with the rotating target spacecraft. Adv. Space Res. 2019, 63, 3223–3234. [Google Scholar] [CrossRef]
- Stesina, F. Tracking Model Predictive Control for Docking Maneuvers of a CubeSat with a Big Spacecraft. Aerospace 2021, 8, 197. [Google Scholar] [CrossRef]
- Eren, U.; Prach, A.; Koçer, B.B.; Raković, S.V.; Kayacan, E.; Açıkmeşe, B. Model Predictive Control in Aerospace Systems: Current State and Opportunities. J. Guid. Control Dyn. 2017, 40, 1541–1566. [Google Scholar] [CrossRef]
- Federico, G. Ensuring Safe Docking Maneuvers on Floating Platform Using Nonlinear Model Predictive Control (NMPC); Luleå University of Technology, Department of Computer Science, Electrical and Space Engineering: Luleå, Sweden, 2024. [Google Scholar]
- Dong, K.; Luo, J.; Dang, Z.; Wei, L. Tube-based robust output feedback model predictive control for autonomous rendezvous and docking with a tumbling target. Adv. Space Res. 2019, 65, 1158–1181. [Google Scholar] [CrossRef]
- Dong, K.; Luo, J.; Limon, D. A novel stable and safe model predictive control framework for autonomous rendezvous and docking with a tumbling target. Acta Astronaut. 2022, 200, 176–187. [Google Scholar] [CrossRef]
- Oumer, A.M.; Kim, D.-K. Real-Time Fuel Optimization and Guidance for Spacecraft Rendezvous and Docking. Aerospace 2022, 9, 276. [Google Scholar] [CrossRef]
- Bashnick, C.; Ulrich, S. Fast Model Predictive Control for Spacecraft Rendezvous and Docking with Obstacle Avoidance. J. Guid. Control Dyn. 2023, 46, 998–1007. [Google Scholar] [CrossRef]
- Behrendt, G.; Soderlund, A.; Hale, M.; Phillips, S. Autonomous Satellite Rendezvous and Proximity Operations with Time-Constrained Sub-Optimal Model Predictive Control. IFAC-PapersOnLine 2023, 56, 9380–9385. [Google Scholar] [CrossRef]
- Fear, A.; Lightsey, E.G. Autonomous Rendezvous and Docking Implementation for Small Satellites Using Model Predictive Control. J. Guid. Control Dyn. 2024, 47, 539–547. [Google Scholar] [CrossRef]
- Ravikumar, L.; Padhi, R.; Philip, N. Trajectory optimization for Rendezvous and Docking using Nonlinear Model Predictive Control. IFAC-PapersOnLine 2020, 53, 518–523. [Google Scholar] [CrossRef]
- Park, H.; Zappulla, R.; Zagaris, C.; Virgili-Llop, J.; Romano, M. Nonlinear model predictive control for spacecraft rendezvous and docking with a rotating target. In Proceedings of the 27th AAS/AIAA Spaceflight Mechanics Meeting, San Antonio, TX, USA, 5–9 February 2017. [Google Scholar]
- Buckus, R.; Chlebnikovas, A.; Strukcinskiene, B.; Stukas, R.; Austys, D.; Caban, J.; Bogucki, M.; Bogucki, M.; Seleviciene, V.; Kilikevičius, A.; et al. Simulating the dispersion of the energy flux density of the electromagnetic field generated by antennas for mobile communications. Electronics 2022, 11, 2431. [Google Scholar] [CrossRef]
- Iman, A.; Zeng, S.; Fang, H. Nonlinear model predictive control based on constraint-aware particle filtering/smoothing. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021. [Google Scholar]
- Lion, L.; Caon, A.; Olivieri, L.; Branz, F.; Francesconi, A. Kinematic tests on a docking mechanism for microsatellites. CEAS Space J. 2023, 16, 445–455. [Google Scholar] [CrossRef]
- Amnon, R.; Wiseman, Y. Compression of GNSS data with the aim of speeding up communication to autonomous vehicles. Remote Sens. 2023, 15, 2165. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Name | Value | Unit |
|---|---|---|---|
| Structure parameter | Quality | 11.2 | kg |
| Moment of inertia | 0.1106 | kg·m2 | |
| Dimension of envelope | 0.3 × 0.3 × 0.5 | m | |
| Thruster parameters | Magnitude of thrust | 0.1 | N |
| Thruster moment arm | 0.1 | m | |
| Battery parameter | Nominal voltage | 24 | V |
| Battery capacity | 7.5 | Ah |
| Parameters | Value | Unit |
|---|---|---|
| Time step | 0.5 | s |
| Prediction horizon | 8 | dimensionless |
| Number of particles | 100 | dimensionless |
| Attitude pointing constraint | [−5, 5] | degree |
| Speed limits | [−0.05, 0.05] | m/s |
| Field of view angle | 30 | degree |
| Thrust upper and lower limits | [0, 0.015] | m/s2 |
| Docking interface of the simulator | [−0.3, 0] | m |
| Disturbance torque | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Chen, D.; Wang, C.; Liao, W. Research on Space Operation Control of Air Float Satellite Simulator Based on Constraints Aware Particle Filtering-Nonlinear Model Predictive Control. Electronics 2024, 13, 3571. https://doi.org/10.3390/electronics13173571
Xu L, Chen D, Wang C, Liao W. Research on Space Operation Control of Air Float Satellite Simulator Based on Constraints Aware Particle Filtering-Nonlinear Model Predictive Control. Electronics. 2024; 13(17):3571. https://doi.org/10.3390/electronics13173571
Chicago/Turabian StyleXu, Lingfeng, Danhe Chen, Chuangge Wang, and Wenhe Liao. 2024. "Research on Space Operation Control of Air Float Satellite Simulator Based on Constraints Aware Particle Filtering-Nonlinear Model Predictive Control" Electronics 13, no. 17: 3571. https://doi.org/10.3390/electronics13173571
APA StyleXu, L., Chen, D., Wang, C., & Liao, W. (2024). Research on Space Operation Control of Air Float Satellite Simulator Based on Constraints Aware Particle Filtering-Nonlinear Model Predictive Control. Electronics, 13(17), 3571. https://doi.org/10.3390/electronics13173571