

Low-Voltage Water Pump System Based on Permanent Magnet Synchronous Motor


Abstract
:1. Introduction
2. System Design
2.1. Structure of the Pump
2.2. Selection of the Motor
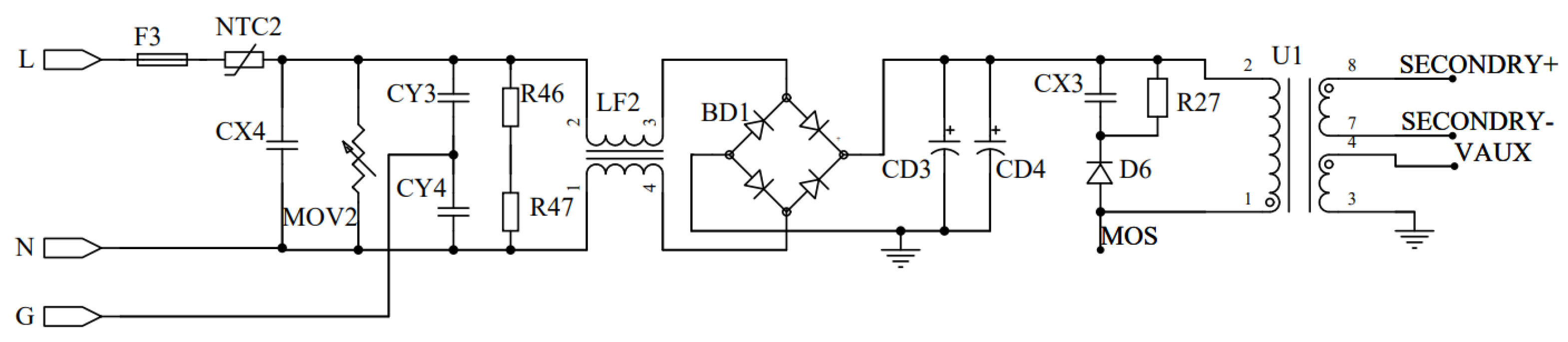
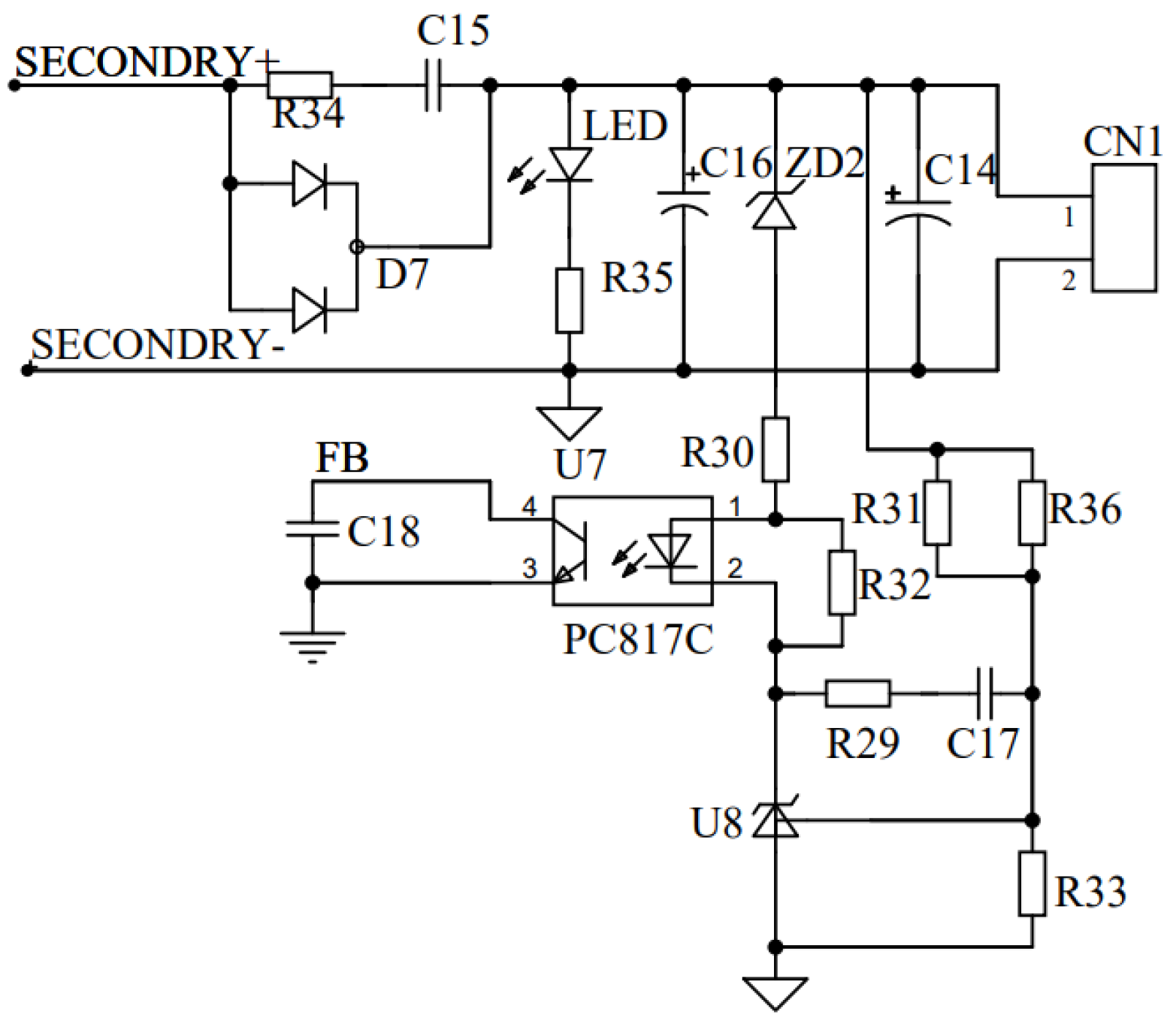
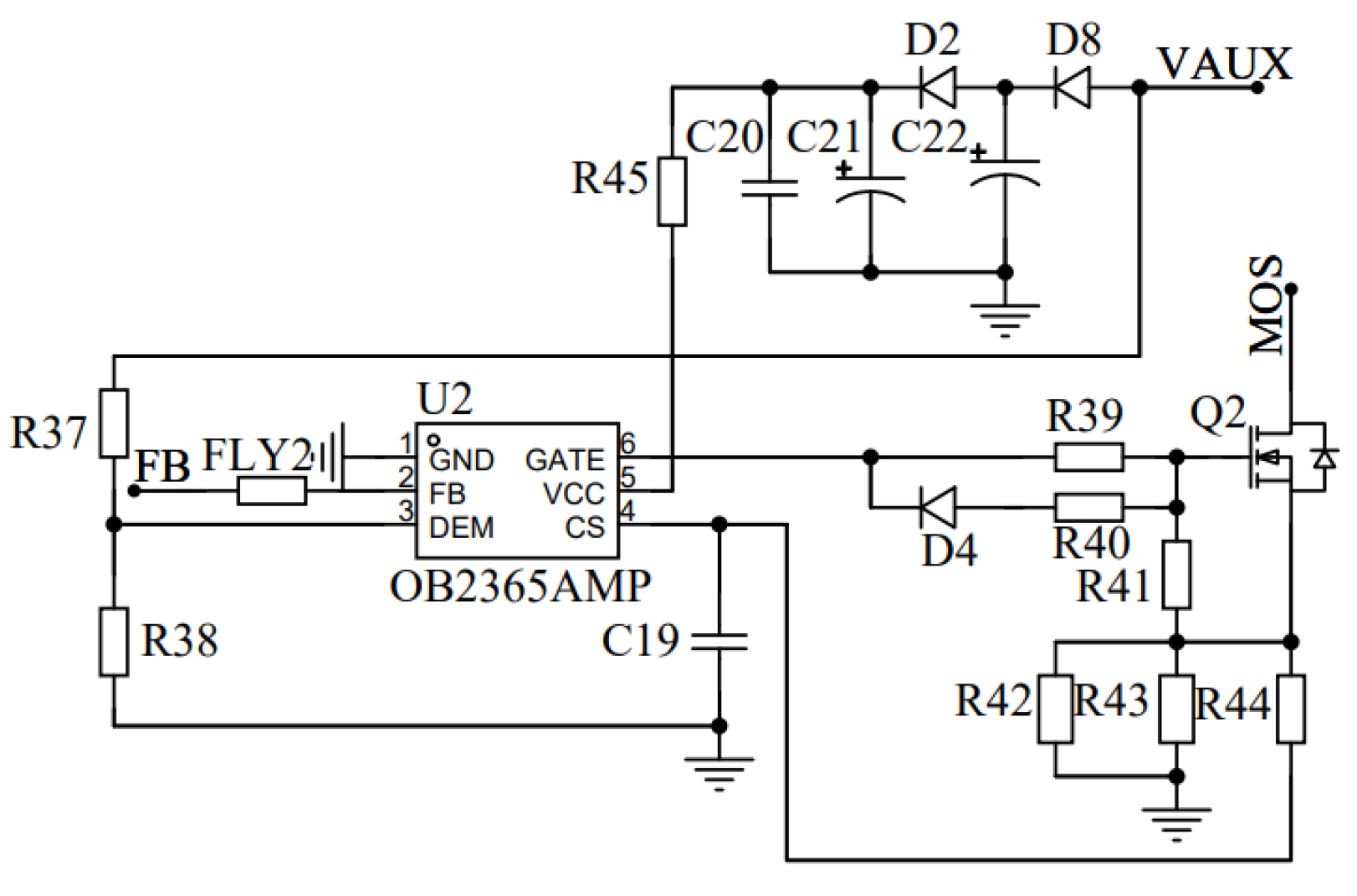
2.3. Switching Power Supply
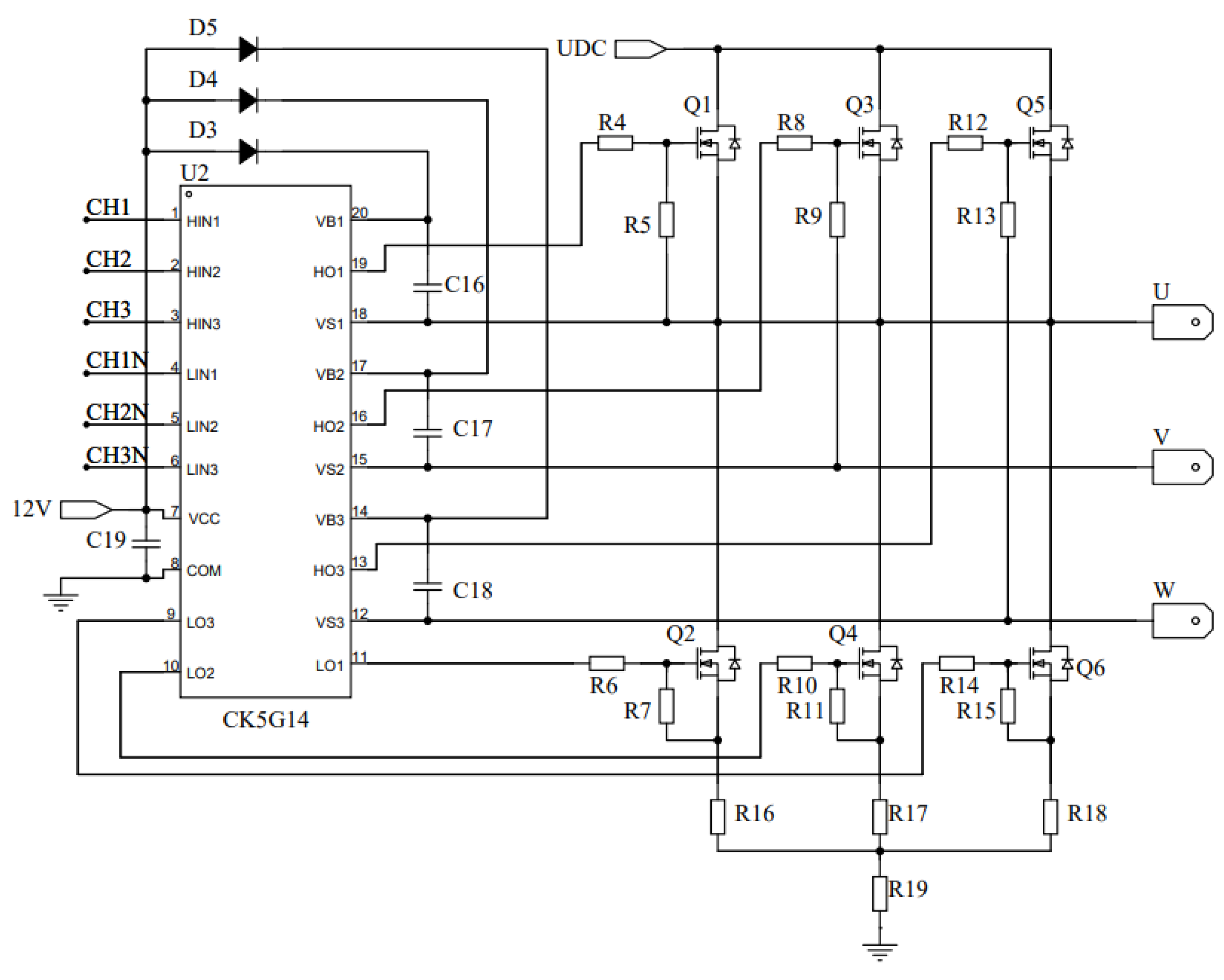
2.4. Driver Circuit
3. Mathematical Model
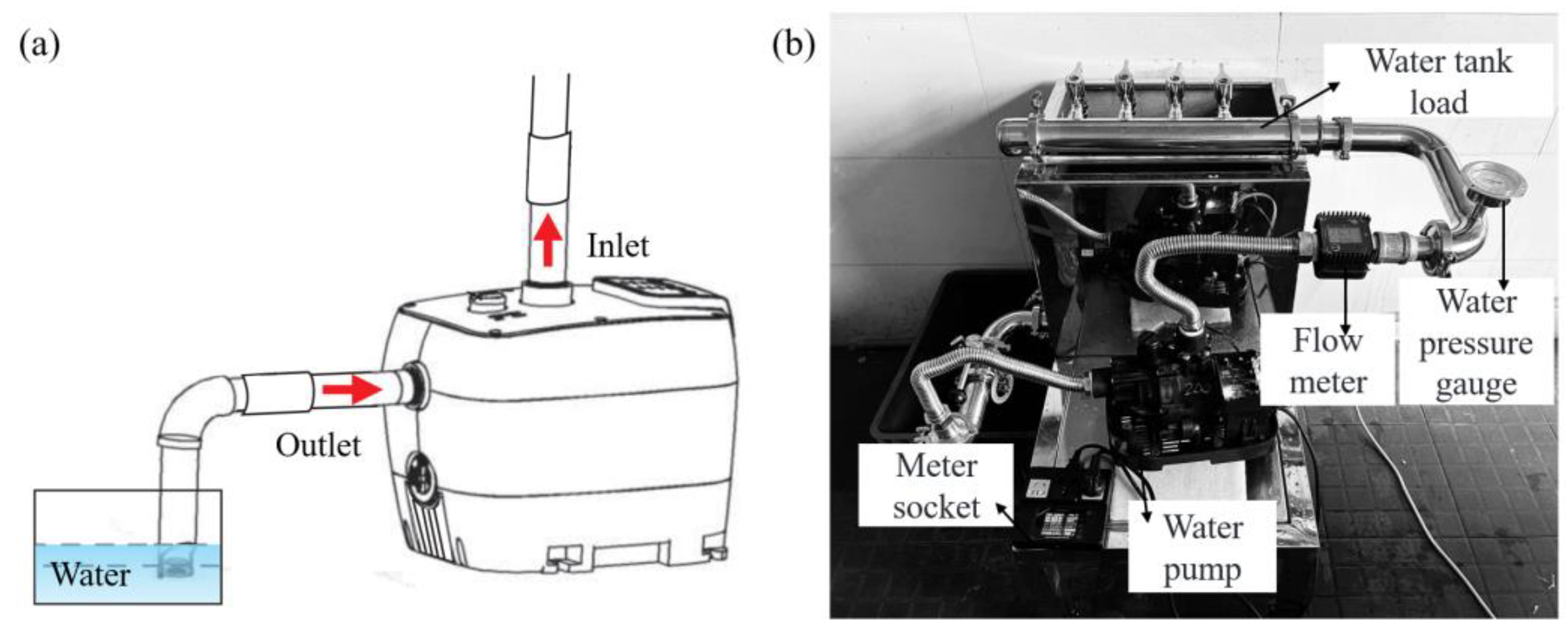
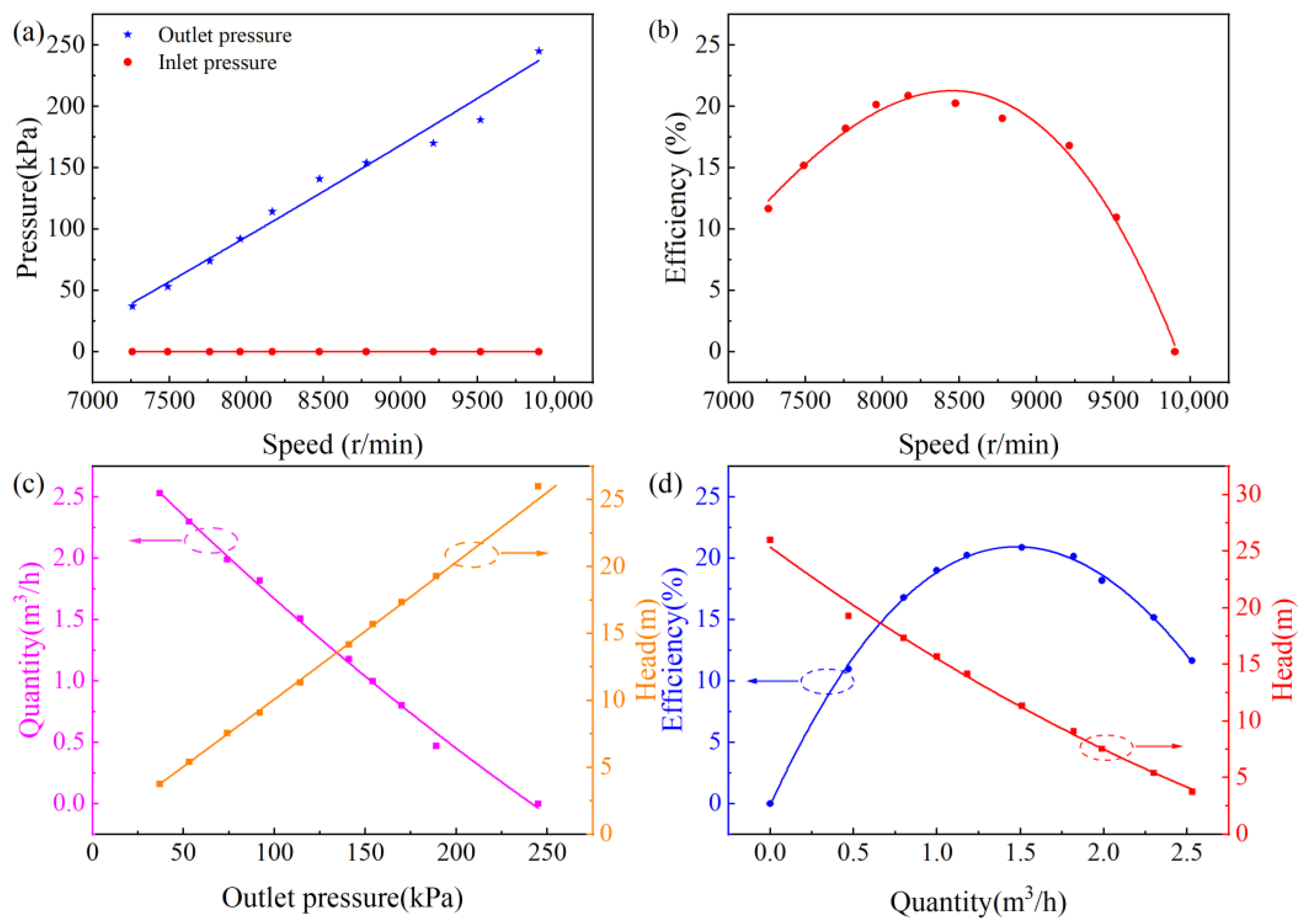
4. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gan, X.; Pei, J.; Pavesi, G.; Yuan, S.; Wang, W. Application of intelligent methods in energy efficiency enhancement of pump system: A review. Energy Rep. 2022, 8, 11592–11606. [Google Scholar] [CrossRef]
- Kashif, M.; Singh, B. Modified active-power MRAS based adaptive control with reduced sensors for PMSM operated solar water pump. IEEE Trans. Energy Convers. 2022, 38, 38–52. [Google Scholar] [CrossRef]
- Kim, S.I.; Im, J.H.; Song, E.Y.; Kim, R.Y. A new rotor position estimation method of IPMSM using all-pass filter on high-frequency rotating voltage signal injection. IEEE Trans. Ind. Electron. 2016, 63, 6499–6509. [Google Scholar] [CrossRef]
- Shen, H.; Zhang, C. A new efficient sensorless I/f control method for IPMSM drives. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 209–213. [Google Scholar]
- Bolognani, S.; Tubiana, L.; Zigliotto, M. Extended Kalman filter tuning in sensorless PMSM drives. In Proceedings of the Power Conversion Conference-Osaka 2002 (Cat. No. 02TH8579), Osaka, Japan, 2–5 April 2002; Volume 1, pp. 276–281. [Google Scholar]
- Lu, H.; Wu, J.; Li, M. A new sliding mode observer for the sensorless control of a PMLSM. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 5364–5369. [Google Scholar]
- Lai, C.; Feng, G.; Tian, J.; Li, Z.; Zuo, Y.; Balamurali, A.; Kar, N.C. PMSM drive system efficiency optimization using a modified gradient descent algorithm with discretized search space. IEEE Trans. Transp. Electrif. 2020, 6, 1104–1114. [Google Scholar] [CrossRef]
- Bai, S. Flux-weakening control of permanent magnet synchronous motor using leading angle. In Proceedings of the 2011 International Conference on Electrical Machines and Systems, Beijing, China, 20–23 August 2011; pp. 1–5. [Google Scholar]
- Algarny, K.; Abdelrahman, A.S.; Youssef, M.Z. Performance comparison between induction and permanent magnet synchronous electric machines in water pump application. In Proceedings of the European Conference on Electrical Engineering and Computer Science, Bern, Switzerland, 20–22 December 2018; pp. 165–169. [Google Scholar]
- Zamudio-Ramírez, I.; Osornio-Ríos, R.A.; Antonino-Daviu, J.A.; Quijano-Lopez, A. Smart-sensor for the automatic detection of electromechanical faults in induction motors based on the transient stray flux analysis. Sensors 2020, 20, 1477. [Google Scholar] [CrossRef] [PubMed]
- Wankhede, A.K.; Pal, S.; Singh, M.; Gogte, O.R.; Sharma, A.; Fernandes, B.G. Development of Efficient 5-HP BLDC motor for Solar water pump and performance comparison with Induction Motor counterpart. In Proceedings of the 2021 IEEE India Council International Subsections Conference (INDISCON), Nagpur, India, 27–29 August 2021; pp. 1–4. [Google Scholar]
- Wang, Q.; Wang, S.; Chen, C. Review of sensorless control techniques for PMSM drives. IEEJ Trans. Electr. Electron. Eng. 2019, 14, 1543–1552. [Google Scholar] [CrossRef]
- Chen, H.; Demerdash, N.A.; El-Refaie, A.M.; Guo, Y.; Hua, W.; Lee, C.H. Investigation of a 3D-magnetic flux PMSM with high torque density for electric vehicles. IEEE Trans. Energy Convers. 2021, 37, 1442–1454. [Google Scholar] [CrossRef]
- Ullah, K.; Guzinski, J.; Mirza, A.F. Critical review on robust speed control techniques for permanent magnet synchronous motor (PMSM) speed regulation. Energies 2022, 15, 1235. [Google Scholar] [CrossRef]
- Li, Z.; Wang, F.; Ke, D.; Li, J.; Zhang, W. Robust continuous model predictive speed and current control for PMSM with adaptive integral sliding-mode approach. IEEE Trans. Power Electron. 2021, 36, 14398–14408. [Google Scholar] [CrossRef]
- Liu, L.; Jin, D.; Si, J.; Liang, D. A novel nonsingular fast terminal sliding mode observer combining I-F method for wide-speed sensorless control of PMSM drives. IET Power Electron. 2023, 16, 843–855. [Google Scholar] [CrossRef]
- Zhang, M.; Xia, B.; Zhang, J. Parameter design and convergence analysis of flux observer for sensorless pmsm drives. IEEE Trans. Energy Convers. 2022, 37, 2512–2524. [Google Scholar] [CrossRef]
- Yu, B.; Shen, A.; Chen, B.; Luo, X.; Tang, Q.; Xu, J.; Zhu, M. A compensation strategy of flux linkage observer in SPMSM sensorless drives based on linear extended state observer. IEEE Trans. Energy Convers. 2021, 37, 824–831. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y. Performance improvement of nonlinear flux observer for sensorless control of PMSM. IEEE Trans. Ind. Electron. 2023, 70, 12014–12023. [Google Scholar] [CrossRef]
- Ortega, R.; Praly, L.; Astolfi, A.; Lee, J.; Nam, K. Estimation of rotor position and speed of permanent magnet synchronous motors with guaranteed stability. IEEE Trans. Control Syst. Technol. 2010, 19, 601–614. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, C.; Zhou, M.; You, X. Flux-weakening in PMSM drives: Analysis of voltage angle control and the single current controller design. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 437–445. [Google Scholar] [CrossRef]
- GB/T 3216-2016; Rotodynamic Pumps–Hydraulic Performance Acceptance Tests—Grades 1, 2 and 3. State Administration for Market Regulation, Standardization Administration of PRC: Beijing, China, 2016.
- Emiliawati, A. A study of water pump efficiency for household water demand at Lubuklinggau. In Proceedings of the AIP Conference Proceedings, Provo, UT, USA, 16–21 July 2017; Volume 1903. [Google Scholar]
- Quoilin, S.; Van Den Broek, M.; Declaye, S.; Dewallef, P.; Lemort, V. Techno-economic survey of Organic Rankine Cycle (ORC) systems. Renew. Sustain. Energy Rev. 2013, 22, 168–186. [Google Scholar] [CrossRef]
- Walski, T.; Zimmerman, K.; Dudinyak, M.; Dileepkumar, P. Some surprises in estimating the efficiency of variable-speed pumps with the pump affinity laws. In Proceedings of the World Water & Environmental Resources Congress 2003, Philadelphia, PA, USA, 23–26 June 2003; pp. 1–10. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbols | Values |
|---|---|---|
| Rated power kw | P | 0.13 |
| Rated speed r·min−1 | N | 3000 |
| Rated voltage v | V | 36 |
| Rated current A | I | 3.6 |
| Polepairs | pn | 2 |
| Stator resistance Ω | Rs | 0.525 |
| Magnetic flux Wb | ψf | 0.01154 |
| Stator inductance mH | Ld | 1.683 |
| Stator inductance mH | Lq | 1.683 |
| Input Voltage V | Linear Adjustment Rate % | Load Regulation % | Ripple mV | Efficiency % |
|---|---|---|---|---|
| 120 | 0.58 | 0.31 | <500 | 86.4 |
| 220 | 0.38 | 0.28 | <500 | 89.6 |
| 260 | 0.33 | 0.11 | <500 | 89.7 |
| Measured Parameter | Instrument | Accuracy |
|---|---|---|
| Flow rate | Digital Flowmeter | ±5% |
| Pressure | Precision Pressure Gauge | ±0.4% |
| Voltage and Power | Digital Power Monitor | ±1% |
| Speed | Current clamp | ±2% |
| Types of Pumps | Voltage V | Flow Rate m3/h | Head m | Power kw | Speed r·min−1 | Maximum Efficiency % |
|---|---|---|---|---|---|---|
| Squirrel Cage Induction Motor Pump | 219.1 | 2.02 | 6 | 0.203 | 2776 | 9.39 |
| Single Phase AC Motor Pump | 221.8 | 1.19 | 11 | 0.240 | 2985 | 8.58 |
| Thermal Shallow well Water pump [23] | 220 | 1.23 | 14.6 | 0.290 | / | 12.2 |
| Diaphragm piston pump [24] | / | / | / | / | / | 15 |
| Phase TEFC motor [25] | 230 | 1.81 | 0.6 | / | / | 15.1 |
| This work | 36.0 | 1.51 | 11.4 | 0.130 | 8168 | 20.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, X.; Zhou, L.; Lang, T.; Jiang, Y. Low-Voltage Water Pump System Based on Permanent Magnet Synchronous Motor. Electronics 2024, 13, 3674. https://doi.org/10.3390/electronics13183674
Jin X, Zhou L, Lang T, Jiang Y. Low-Voltage Water Pump System Based on Permanent Magnet Synchronous Motor. Electronics. 2024; 13(18):3674. https://doi.org/10.3390/electronics13183674
Chicago/Turabian StyleJin, Xinrong, Leifu Zhou, Tingting Lang, and Yanbing Jiang. 2024. "Low-Voltage Water Pump System Based on Permanent Magnet Synchronous Motor" Electronics 13, no. 18: 3674. https://doi.org/10.3390/electronics13183674
APA StyleJin, X., Zhou, L., Lang, T., & Jiang, Y. (2024). Low-Voltage Water Pump System Based on Permanent Magnet Synchronous Motor. Electronics, 13(18), 3674. https://doi.org/10.3390/electronics13183674