
Control Method for Ultra-Low Frequency Oscillation and Frequency Control Performance in Hydro–Wind Power Sending System





Abstract
1. Introduction
- (1)
- For ULFO mechanism analysis, an EUFM considering hydropower and wind units is established. The damping torque coefficients of the hydro–wind power system are derived.
- (2)
- Another effort is to reveal the detailed influence of WT frequency control parameters on frequency characteristics. In this aspect, the damping level and key performance indicators of PFR are investigated.
- (3)
- From the perspective of ULFO suppression by fulfilling the damping control potential of wind units. An optimization model of WT control parameters is established. The objective function balances both ULFO suppression and PFR performance, which is solved by the PSO algorithm. Then, the superior PFR performance of hydro units is profitable.
2. Extended Unified Frequency Model of Hydro–Wind System
2.1. The Model of Hydropower Unit
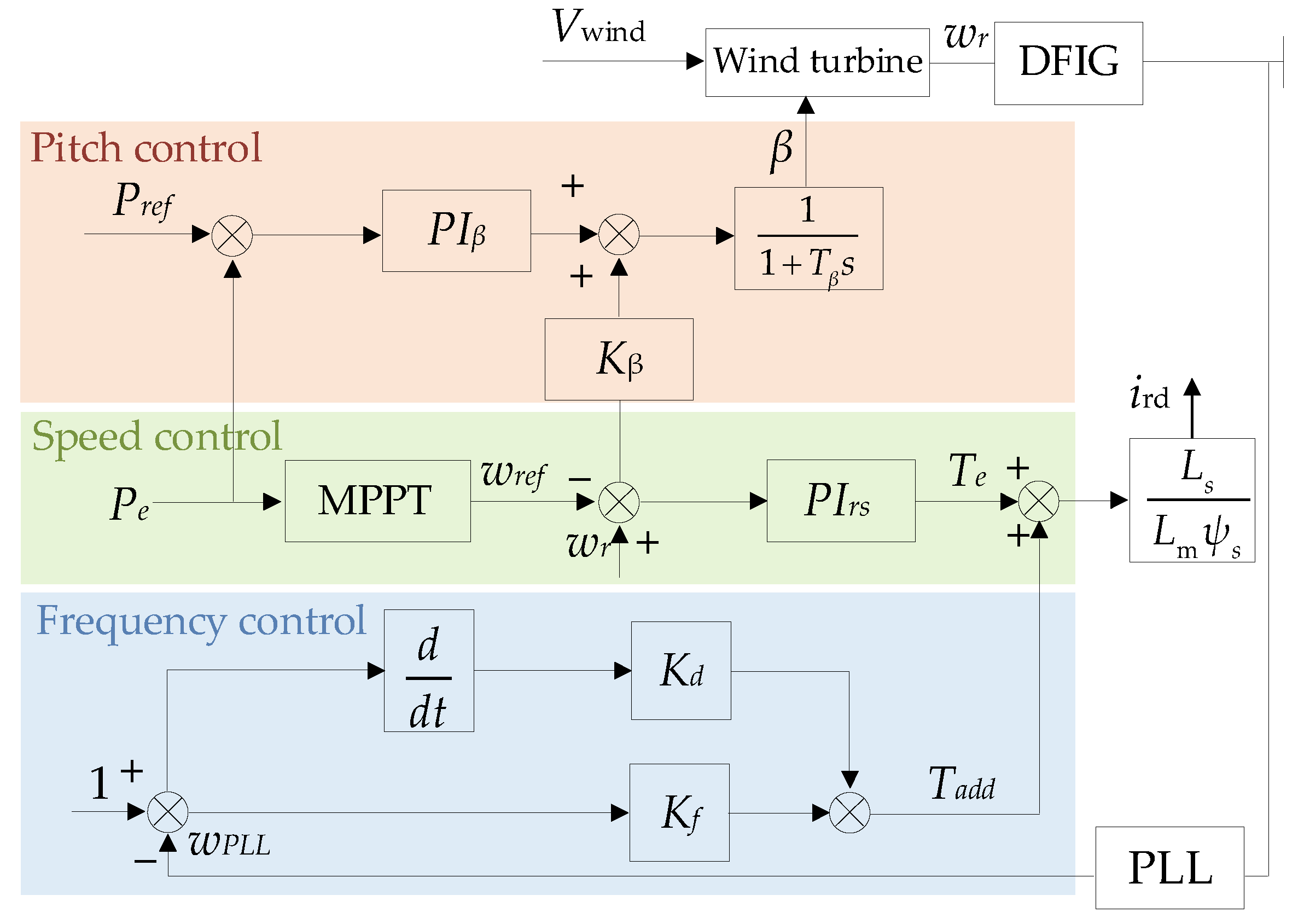
2.2. The Model of Doubly Fed Induction Generator
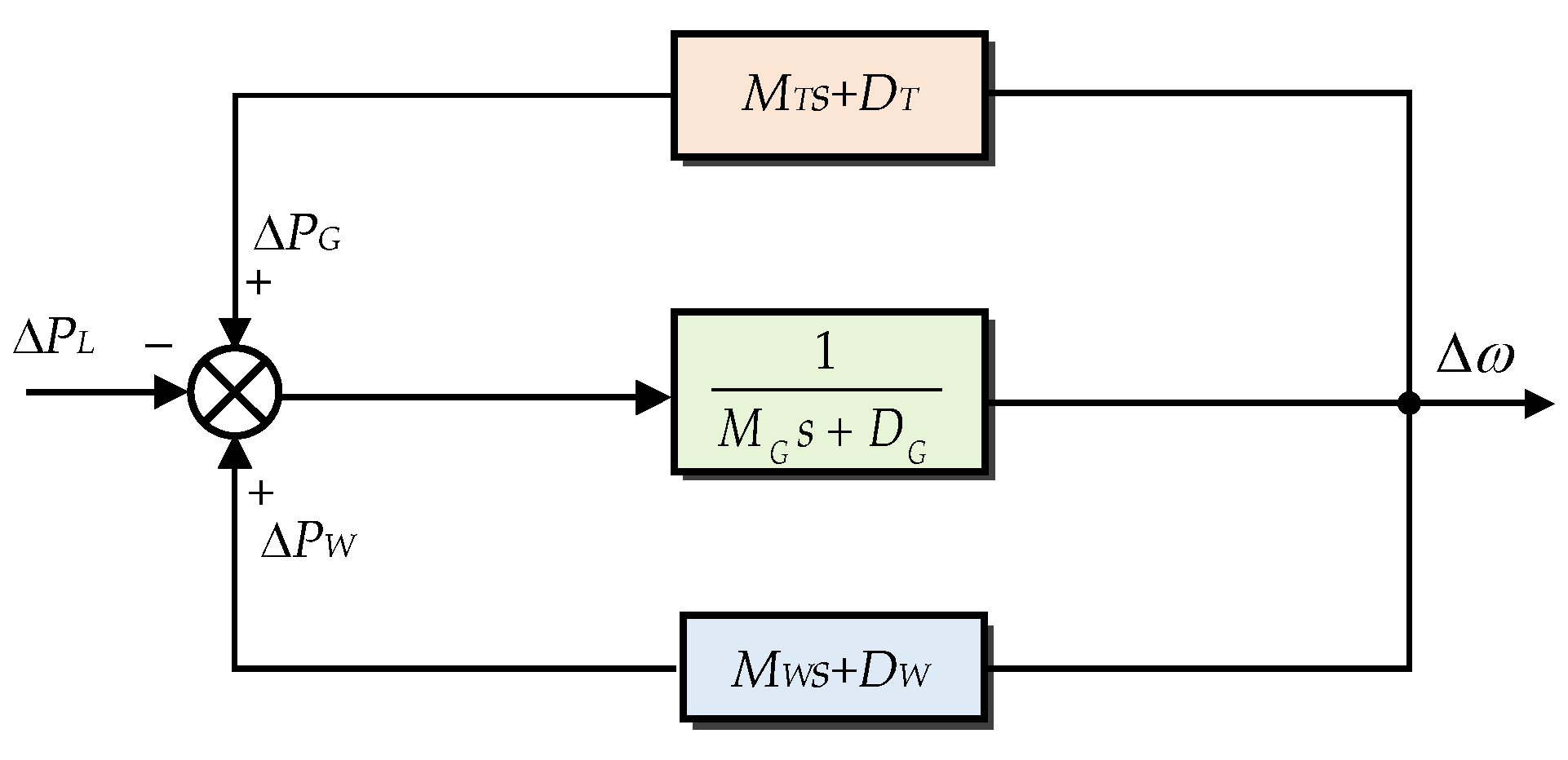
2.3. Extended Unified Frequency Model
3. The Influence of DFIG on ULFO and PFR Performance
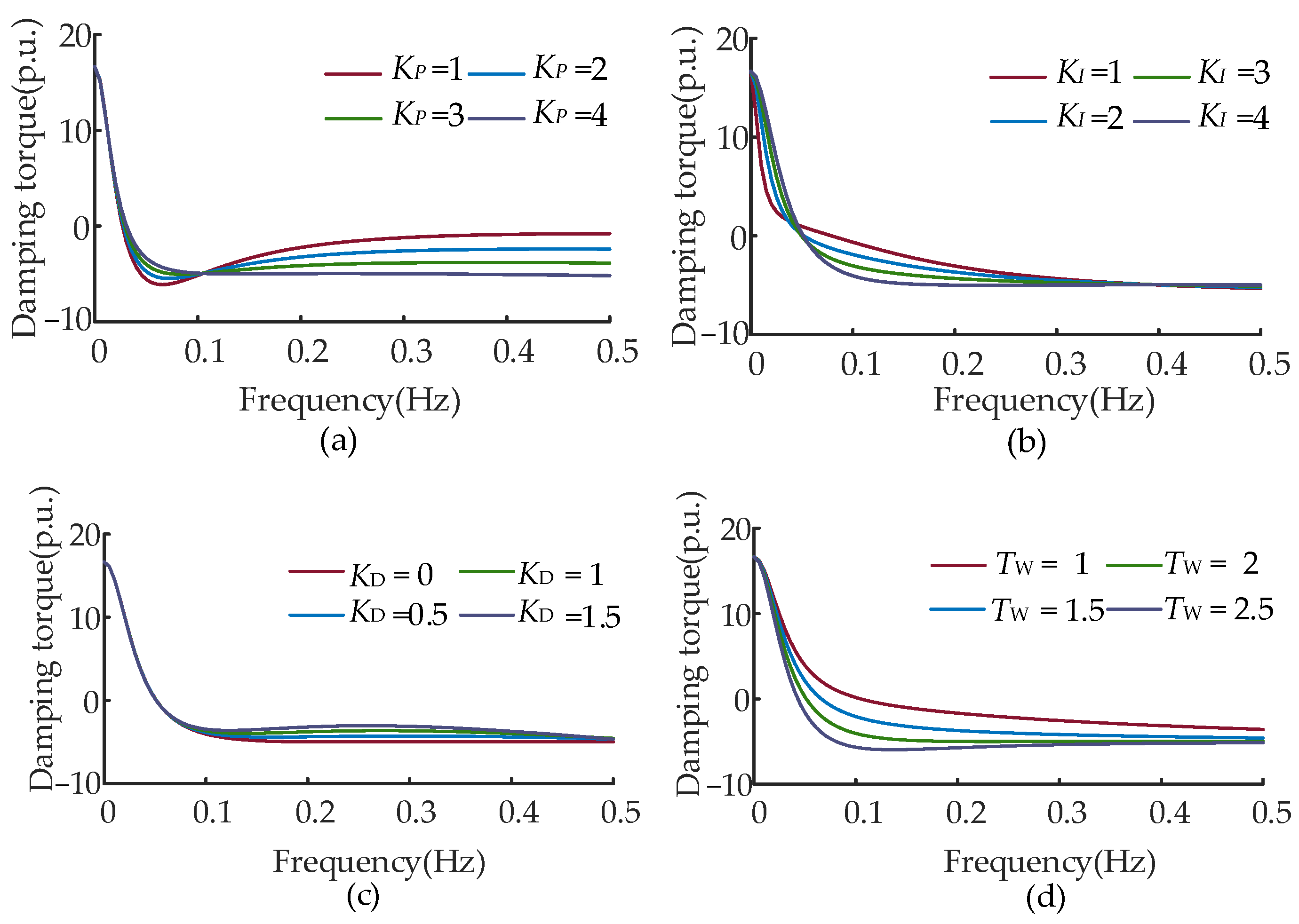
3.1. ULFO Damping Characteristics of DFIG
3.2. PFR Performance of DFIG
3.2.1. The Rate of Change in Frequency
3.2.2. The Maximum Frequency Deviation
3.2.3. Maximum Secondary Frequency Drop Deviation
4. Comprehensive Control Optimization of DFIG for ULFO Suppression and PFR
4.1. Objective for ULFO Damping Control of DFIG
4.2. Objective for PFR Performance of DFIG
- (1)
- The lag time of PFR should not exceed 2 s;
- (2)
- The rise time of PFR should not exceed 9 s;
- (3)
- The adjustment time of PFR should not exceed 15 s;
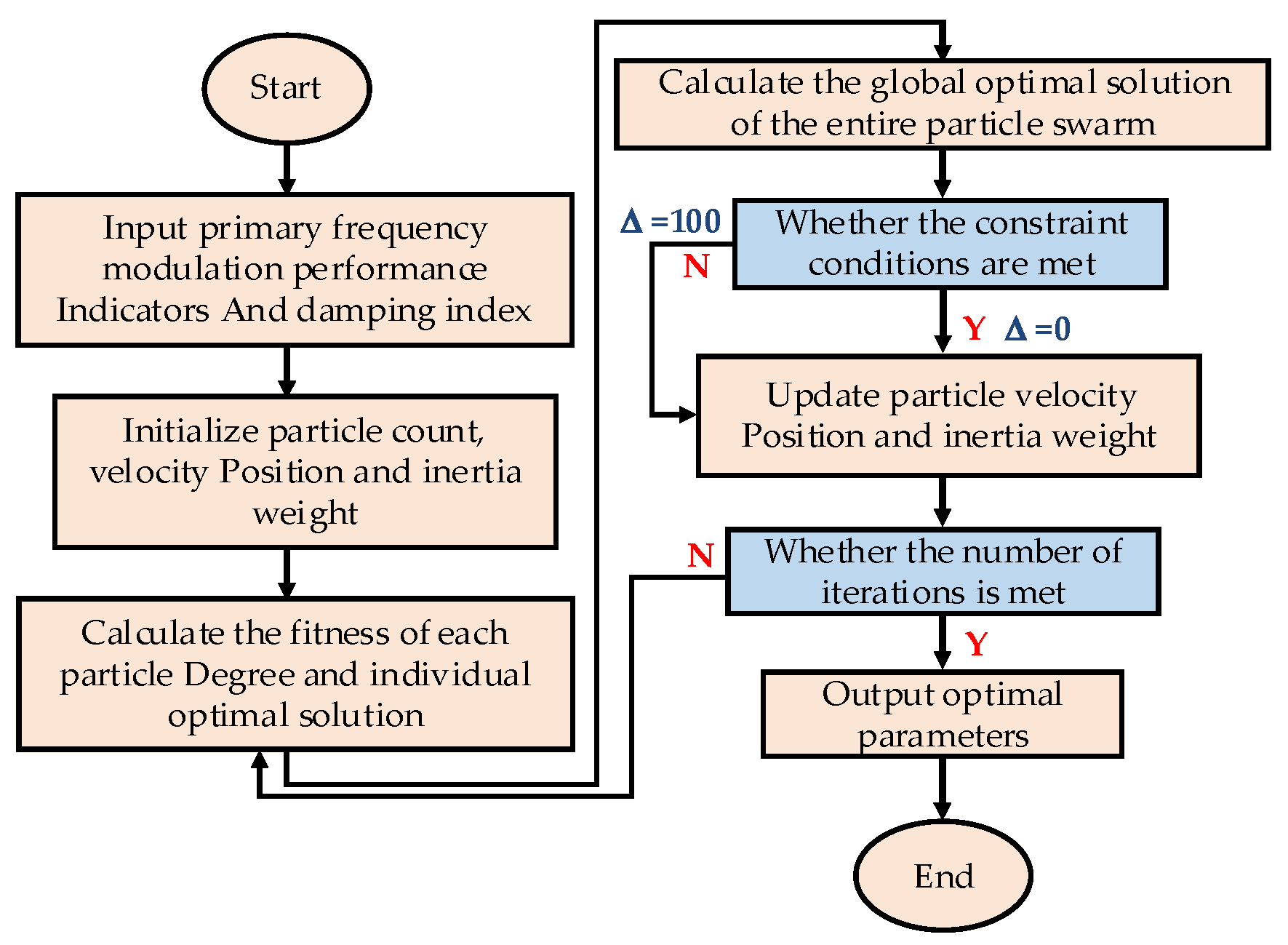
4.3. Comprehensive Control Optimization Model and Solution
5. Simulations and Verification
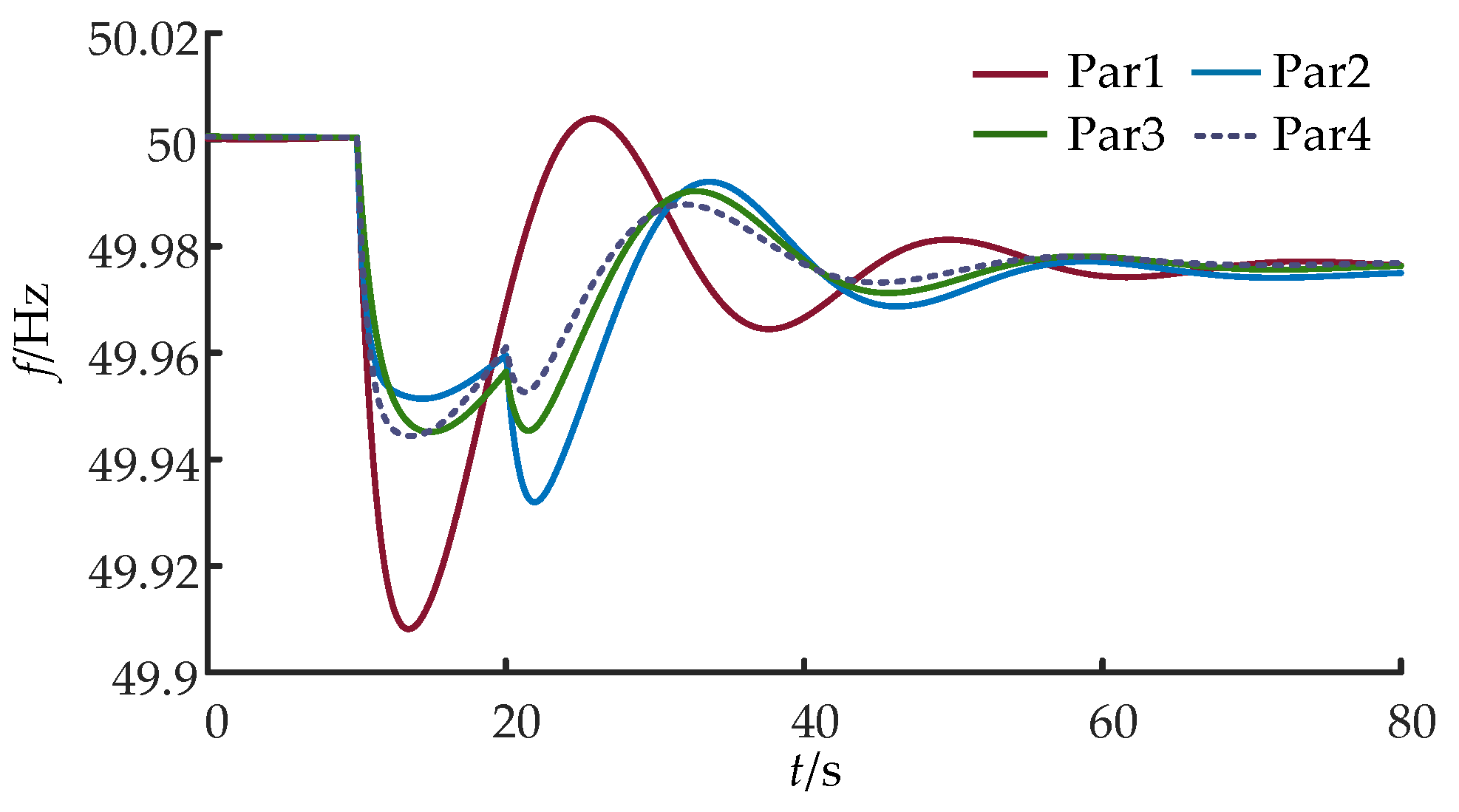
5.1. Case 1: Hydro–Wind Two-Machine Islanding System
- Par 1:
- No additional control, Kd = 0, Kf = 0.
- Par 2:
- Only considering damping optimization, Kd = 0, Kf = 50.
- Par 3:
- Par 4:
- Comprehensive optimization considering both damping and frequency response, Kd = 15.3, Kf = 30.4.
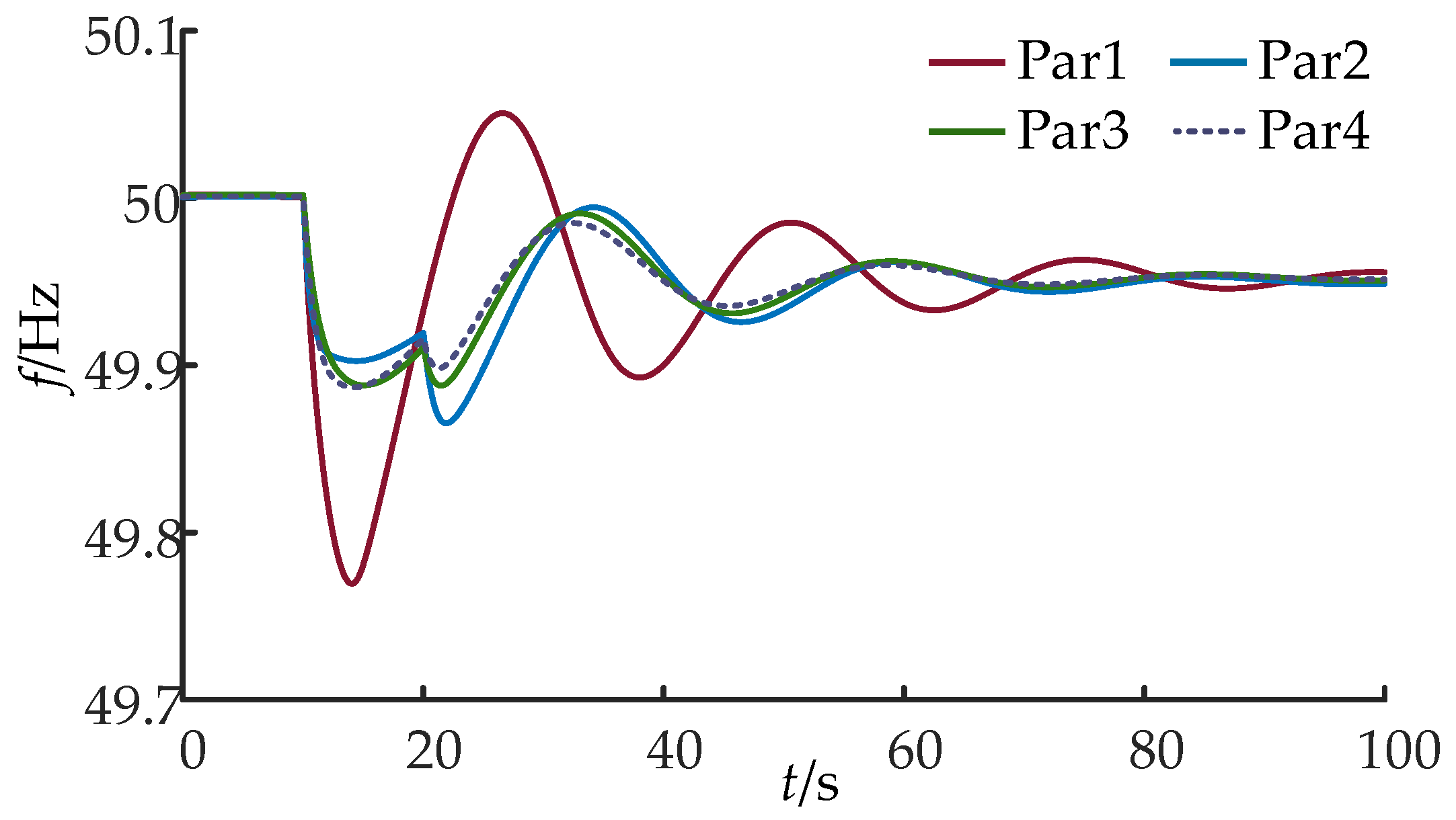
5.2. Case 2: Asynchronous Hydro–Wind System Transmitted by HVDC
- Par 1:
- No additional control, Kd = 0, Kf = 0.
- Par 2:
- Consideration of damping optimization only, Kd = 0, Kf = 70.
- Par 3:
- Par 4:
- Comprehensive optimization of damping and PFR performance, Kd = 20.5, Kf = 36.8.
6. Conclusions
- (1)
- The negative damping of hydropower units is the fundamental cause of ULFOs, and unlike the LFO issue, ULFO is within the scope of frequency stability.
- (2)
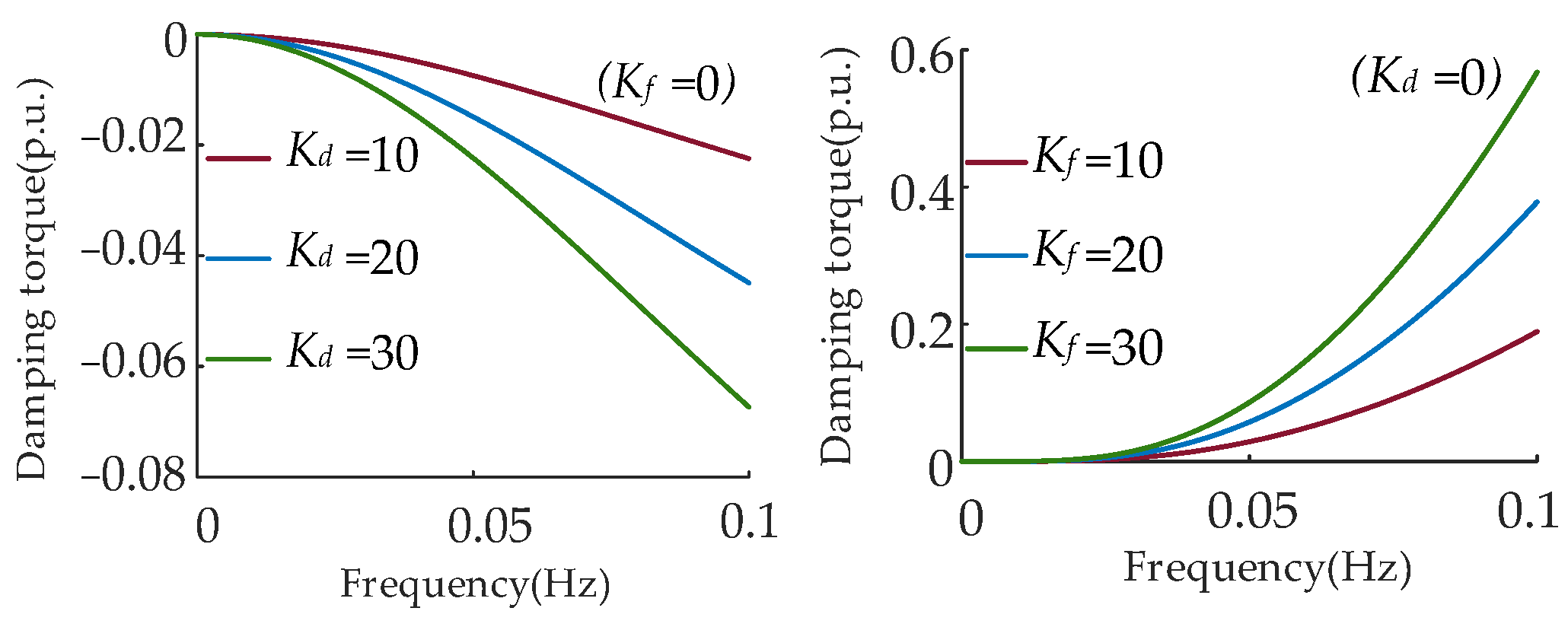
- In the ultra-low frequency band of 0–0.1 Hz, the VIC provides a negative damping torque coefficient. In contrast, the droop control provides a positive damping torque coefficient.
- (3)
- Regarding the influence of DFIG parameters on PFR performance, RoCoF decreases with an increase in Kd; larger Kd and Kf can both reduce the maximum frequency deviation, but the values of Kd and Kf should not be set too large to prevent excessive secondary frequency drop.
- (4)
- The integration of wind power provides a viable option for ULFO suppression. The objective function is formulated to balance both ULFO suppression and PFR performance. Simulation results verify that the optimized WT parameters improve more than 15% damping ratio while guaranteeing PFR performance.
- (5)
- In recent years, the control scheme of energy storage systems has been improved [32]. Future research will focus on further investigating wind energy storage systems, considering the strategy of coordinating wind turbines and energy storage to suppress ULFOs.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, C.; Zhang, J.; Chen, Y.; Xu, M. Mechanism Analysis and Simulation on Ultra Low Frequency Oscillation of Yunnan Power Grid in Asynchronous Interconnection Mode. South. Power Syst. Technol. 2016, 10, 29–34. [Google Scholar]
- Wang, P.; Li, B.; Jiang, Q.; Chen, G.; Han, X.; Dragicevic, T.; Liu, T. The occurrence mechanism and damping method of ultra-low-frequency oscillations. IET Renew. Power Gener. 2021, 15, 1100–1115. [Google Scholar] [CrossRef]
- Saarinen, L.; Norrlund, P.; Lundin, U.; Agneholm, E.; Westberg, A. Full-scale test and modelling of the frequency control dynamics of the Nordic power system. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016. [Google Scholar] [CrossRef]
- Pico, H.V.; McCalley, J.D.; Angel, A.; Leon, R.; Castrillon, N.J. Analysis of Very Low Frequency Oscillations in Hydro-Dominant Power Systems Using Multi-Unit Modeling. IEEE Trans. Power Syst. vol. 2012, 27, 1906–1915. [Google Scholar] [CrossRef]
- Chen, L.; Min, Y.; Lu, X.; Xu, X.; Li, Y.; Zhang, Y.; Chen, Q. Online emergency control to suppress frequency oscillations based on damping evaluation using dissipation energy flow. Int. J. Electr. Power Energy Syst. 2018, 103, 414–420. [Google Scholar] [CrossRef]
- Jiang, Q.; Li, B.; Liu, T. Investigation of hydro-governor parameters’ impact on ULFO. IET Renew. Power Gener. 2019, 13, 3133–3141. [Google Scholar] [CrossRef]
- Wang, P.; Jiang, Q.; Li, B.; Liu, T.; Li, X.; Chen, G.; Zeng, X.; Blaabjerg, F. Ultra-low frequency oscillation analysis considering thermal-hydro power proportion. Int. J. Electr. Power Energy Syst. 2023, 148, 108919. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, Y.; Tang, Z.; Hou, J.; Zhang, Y.; Mo, W.; Chen, H. Analysis of ultra-low frequency oscillation in yunnan asynchronous sending system. In Proceedings of the 2017 IEEE Power & Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Chen, G.; Tang, F.; Shi, H.; Yu, R.; Wang, G.; Ding, L.; Liu, B.; Lu, X. Optimization strategy of hydrogovernors for eliminating ultralow-frequency oscillations in hydrodominant power systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1086–1094. [Google Scholar] [CrossRef]
- Jiang, C.; Zhou, J.; Shi, P.; Li, S.; Huang, W.; Gan, D. Multi-objective robust design of hydraulic turbine governor parameters considering ultra-low frequency oscillation. Power Syst. Autom. 2019, 43, 125–131, 147. [Google Scholar]
- Zhang, G.; Zhao, J.; Hu, W.; Cao, D.; Duan, N.; Chen, Z.; Blaabjerg, F. Deep Reinforcement Learning Enabled Bi-Level Robust Parameter Optimization of Hydropower-Dominated Systems for Damping Ultra-Low Frequency Oscillation. J. Mod. Power Syst. Clean Energy 2023, 11, 1770–1783. [Google Scholar] [CrossRef]
- Shi, H.; Chen, G.; Ding, L.; Han, X.; Zhang, Y.; Chen, Z.; Liu, C. Optimization of PID parameters for hydraulic turbine governors that balance primary frequency regulation performance and ultra-low frequency oscillation suppression. Power Grid Technol. 2019, 43, 221–226. [Google Scholar]
- Jia, Y.; Tan, B.; Zhang, W.; Jiang, D.; Yang, C.; Wen, Y. A Novel Control Strategy for Hydraulic Turbines to Consider Both Primary Frequency Regulation and Ultra-Low Frequency Oscillation Suppression. Energies 2024, 17, 1067. [Google Scholar] [CrossRef]
- Vournas, C.D.; Mantzaris, J.C. Application of QSS modeling to stabilizer design for interarea oscillations. IEEE Trans. Power Syst. 2010, 25, 1910–1917. [Google Scholar] [CrossRef]
- Zhang, G.; Hu, W.; Cao, D.; Huang, Q.; Yi, J.; Chen, Z.; Blaabjerg, F. Deep reinforcement learning-based approach for proportional resonance power system stabilizer to prevent ultra-low-frequency oscillations. IEEE Trans. Smart Grid. 2020, 11, 5260–5272. [Google Scholar] [CrossRef]
- Shi, X.; Ruan, G.; Lu, H.; Chen, H.; Cai, W.; Ron, H.; Chen, G.; Zhao, Y. Analysis of Ultra-Low Frequency Oscillation in Hydro-Dominant Power System and Suppression Strategy by GPSS. IEEE Trans. Ind. Appl. 2023, 59, 2796–2806. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, S.; Song, J.; Zhao, Y.; Zhu, W. Tuning approach for power system stabilizer PSS4B using Hybrid PSO. IOP Conf. Ser. Earth Environ. Sci. 2018, 192, 012039. [Google Scholar] [CrossRef]
- Haro-Larrode, M.; Santos-Mugica, M.; Etxegarai, A.; Eguia, P. Methodology for Tuning MTDC Supervisory and Frequency-Response Control Systems at Terminal Level under Over-Frequency Events. Energies 2020, 13, 2807. [Google Scholar] [CrossRef]
- Xing, C.; Liu, M.; Peng, J.; Wang, Y.; Zhou, Y.; Zheng, Z.; Gao, S.; Liao, J. FLC-Based Ultra-Low-Frequency Oscillation Suppression Scheme for Interconnected Power Grids. Energies 2024, 17, 1300. [Google Scholar] [CrossRef]
- Rimorov, D.; Kamwa, I.; Joos, G. Quasi-steady-state approach for analysis of frequency oscillations and damping controller design. IEEE Trans. Power Syst. 2016, 31, 3212–3220. [Google Scholar] [CrossRef]
- Zhang, R.; Chen, Y.; Li, Z.; Jiang, T.; Li, X. Two-stage robust operation of electricity-gas-heat integrated multi-energy microgrids considering heterogeneous uncertainties. Appl. Energy. 2024, 371, 123690. [Google Scholar] [CrossRef]
- Vidyanandan, K.V.; Senroy, N. Primary frequency regulation by deloaded wind turbines using variable droop. IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Lee, J.; Muljadi, E.; Srensen, P.; Kang, Y.C. Releasable Kinetic Energy-Based Inertial Control of a DFIG Wind Power Plant. IEEE Trans. Sustain. Energy 2016, 7, 279–288. [Google Scholar] [CrossRef]
- Qiao, Y.; Guo, X.; Lu, Z.; Sun, R. Parameter Setting of Auxiliary Frequency Regulation of Wind Turbines Considering Secondary Frequency Drop. Power Grid Technol. 2020, 44, 807–815. [Google Scholar]
- Sun, L.; Zhao, X. Modelling and analysis of frequency-responsive wind turbine involved in power system ultra-low frequency oscillation. IEEE Trans. Sustain. Energy 2021, 13, 844–855. [Google Scholar] [CrossRef]
- Niasse, M.; Zheng, Q.; Xin, A.; Quan, F.A.F.; Simiyu, P. Mitigating Ultra-Low-Frequency Oscillations in Wind-Penetrated Hydro-dominant Power Grid through Virtual Inertia Emulation Strategy. In Proceedings of the 2020 4th International Conference on Power and Energy Engineering (ICPEE), Xiamen, China, 19–21 November 2020; pp. 130–137. [Google Scholar] [CrossRef]
- Xie, R.; KamwaRimorov, I.R.; Moeini, A. Fundamental study of common mode small-signal frequency oscillations in power systems. Int. J. Elect. Power Energy Syst. 2019, 106, 201–209. [Google Scholar] [CrossRef]
- Grenier, M.E.; Lefebvre, D.; Van Cutsem, T. Quasi steady-state models for long-term voltage and frequency dynamics simulation. In Proceedings of the 2005 IEEE Russia Power Tech, St. Petersburg, Russia, 27–30 June 2005. [Google Scholar] [CrossRef]
- Shu, H.; Wang, G.; Chen, J.; Ma, H.; He, T. Coordinated control of wind-storage combined with primary frequency regulation and variable coefficient based on wind speed and SOC. J. Energy Storage 2024, 87, 111356. [Google Scholar] [CrossRef]
- GB/T 40595-2021; Technical Regulations and Testing Guidelines for Primary Frequency Regulation of Grid Connected Power Sources. The State Administration for Market Regulation: Beijing, China, 2021.
- AlRashidi, M.R.; El-Hawary, M.E. A survey of particle swarm optimization applications in electric power systems. IEEE Trans. Evol. Comput. 2008, 13, 913–918. [Google Scholar] [CrossRef]
- Zheng, X.; Khodayar, M.E.; Wang, J.; Yue, M.; Zhou, A. Distributionally Robust Multistage Dispatch with Discrete Recourse of Energy Storage Systems. IEEE Trans. Power Syst. 2024, 39, 1–4. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol of Islanding System | Value | Symbol of Islanding System | Value |
|---|---|---|---|
| KP | 3.6 | Tw | 2.4 s |
| KI | 1.9 | Vspeed | 11 m/s |
| KD | 0.5 | Pwind | 30.5 MW |
| TJ | 10 s | Phy | 69.5 MW |
| Bp | 0.04 | Pload | 100 MW |
| DFIG Parameters | Δfmax (Hz) | Damping Ratio 1 | Damping Ratio 2 |
|---|---|---|---|
| Par 1 | 0.092 | 0.201 | 0.201 |
| Par 2 | 0.064 | 0.434 | 0.211 |
| Par 3 | 0.054 | 0.287 | 0.220 |
| Par 4 | 0.056 | 0.357 | 0.253 |
| Symbol of Sending System | Value | Symbol of Sending System | Value |
|---|---|---|---|
| KP | 4 | Tw | 2.5 s |
| KI | 2 | Vspeed | 11 m/s |
| KD | 0.5 | Pdc | 3000 MW |
| TJ | 8 s | Pwind | 935 MW |
| Bp | 0.04 | Phy | 2885 MW |
| DFIG Parameters | Δfmax (Hz) | Damping Ratio 1 | Damping Ratio 2 |
|---|---|---|---|
| Par 1 | 0.231 | 0.175 | 0.175 |
| Par 2 | 0.129 | 0.382 | 0.177 |
| Par 3 | 0.110 | 0.257 | 0.189 |
| Par 4 | 0.111 | 0.321 | 0.218 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, R.; Jiang, Q.; Li, B.; Liu, T.; Zeng, X. Control Method for Ultra-Low Frequency Oscillation and Frequency Control Performance in Hydro–Wind Power Sending System. Electronics 2024, 13, 3691. https://doi.org/10.3390/electronics13183691
Wu R, Jiang Q, Li B, Liu T, Zeng X. Control Method for Ultra-Low Frequency Oscillation and Frequency Control Performance in Hydro–Wind Power Sending System. Electronics. 2024; 13(18):3691. https://doi.org/10.3390/electronics13183691
Chicago/Turabian StyleWu, Renjie, Qin Jiang, Baohong Li, Tianqi Liu, and Xueyang Zeng. 2024. "Control Method for Ultra-Low Frequency Oscillation and Frequency Control Performance in Hydro–Wind Power Sending System" Electronics 13, no. 18: 3691. https://doi.org/10.3390/electronics13183691
APA StyleWu, R., Jiang, Q., Li, B., Liu, T., & Zeng, X. (2024). Control Method for Ultra-Low Frequency Oscillation and Frequency Control Performance in Hydro–Wind Power Sending System. Electronics, 13(18), 3691. https://doi.org/10.3390/electronics13183691