
TWPT: Through-Wall Position Detection and Tracking System Using IR-UWB Radar Utilizing Kalman Filter-Based Clutter Reduction and CLEAN Algorithm


Abstract
1. Introduction
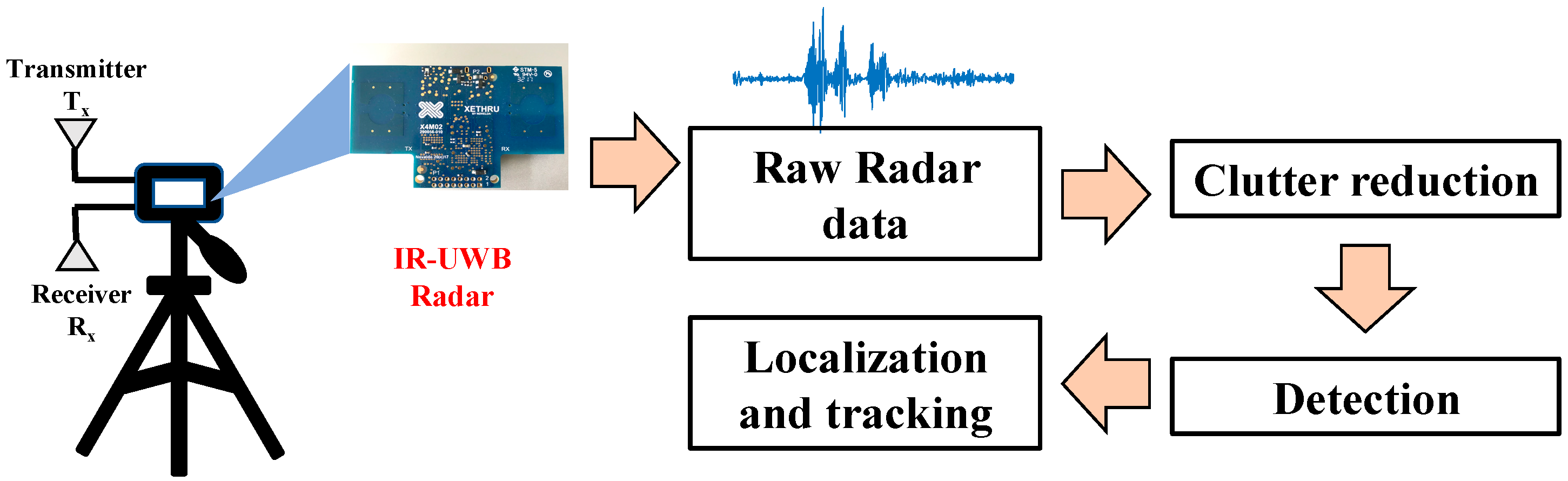
2. IR-UWB Radar Signal Processing
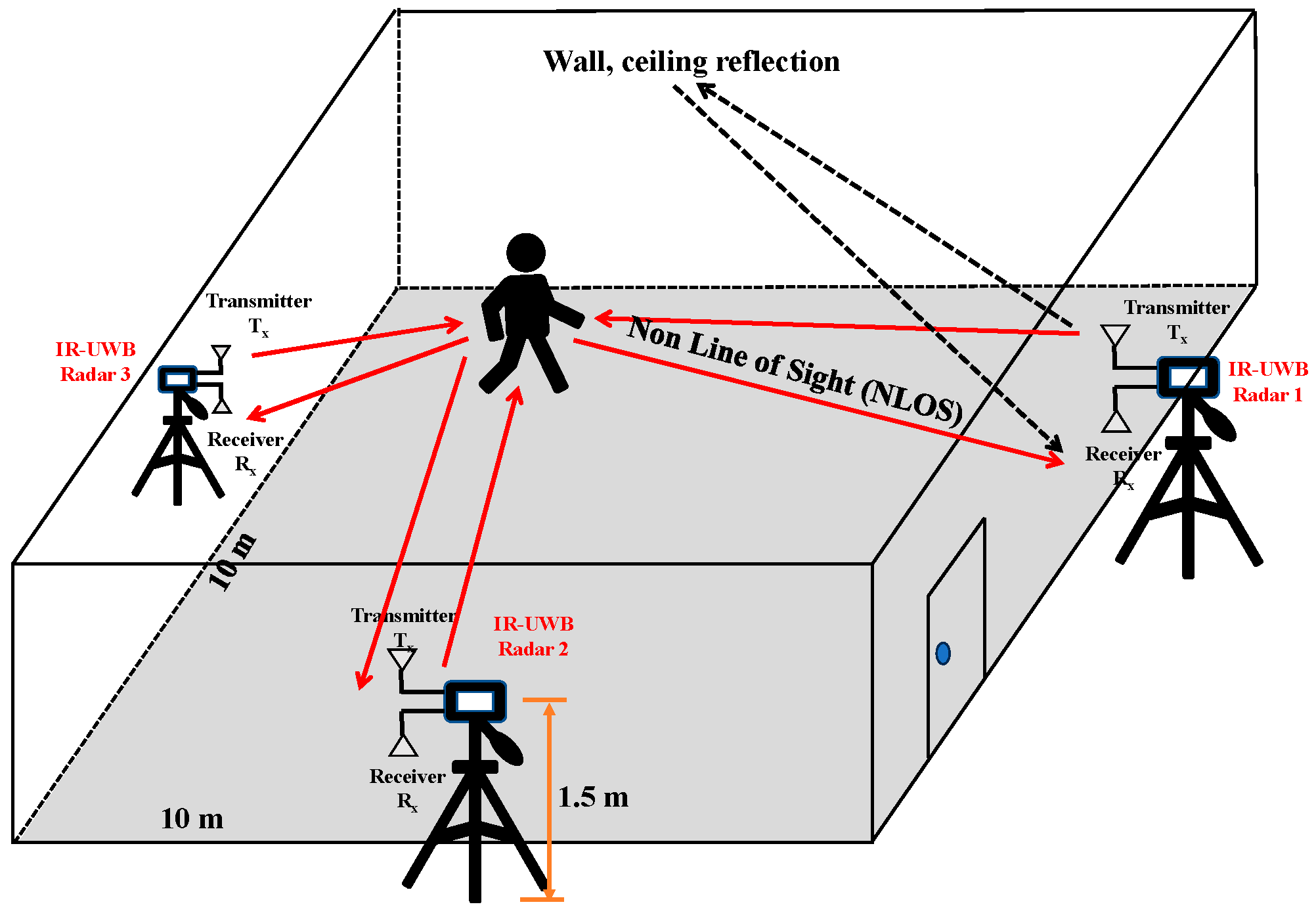
2.1. Experimental Modeling and Signal Preprocessing for IR-UWB Radar
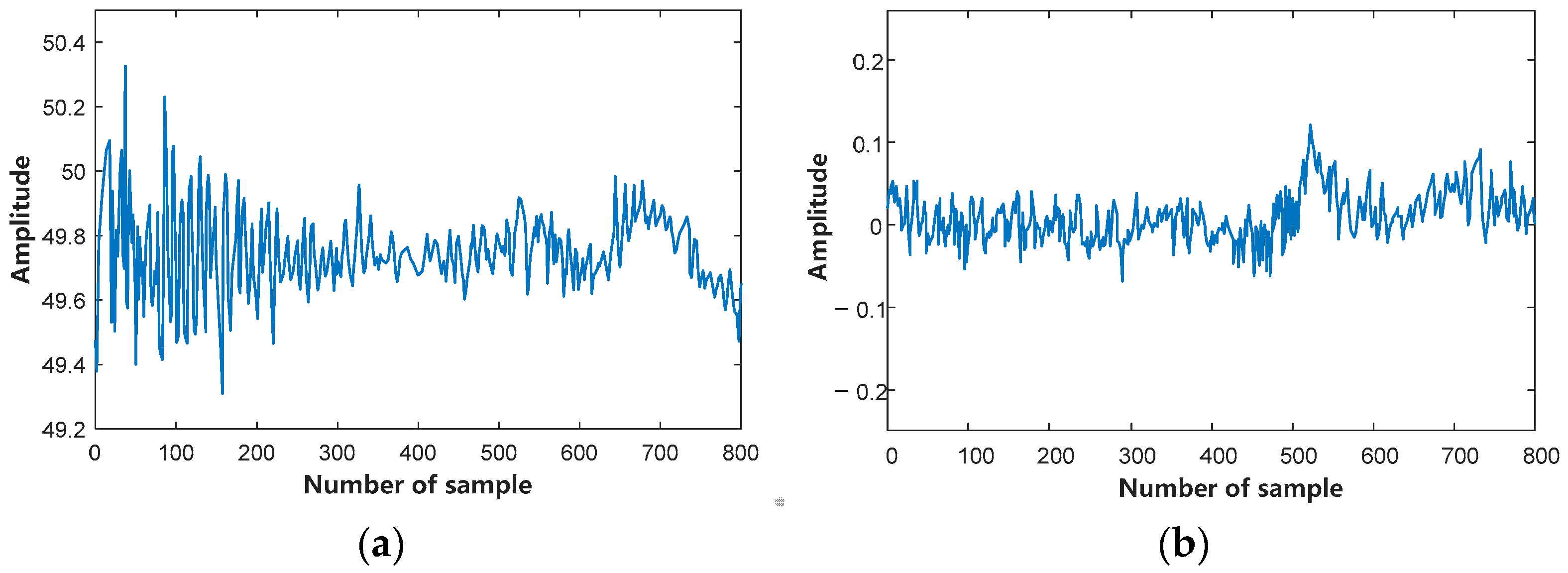
2.2. Clutter Suppression
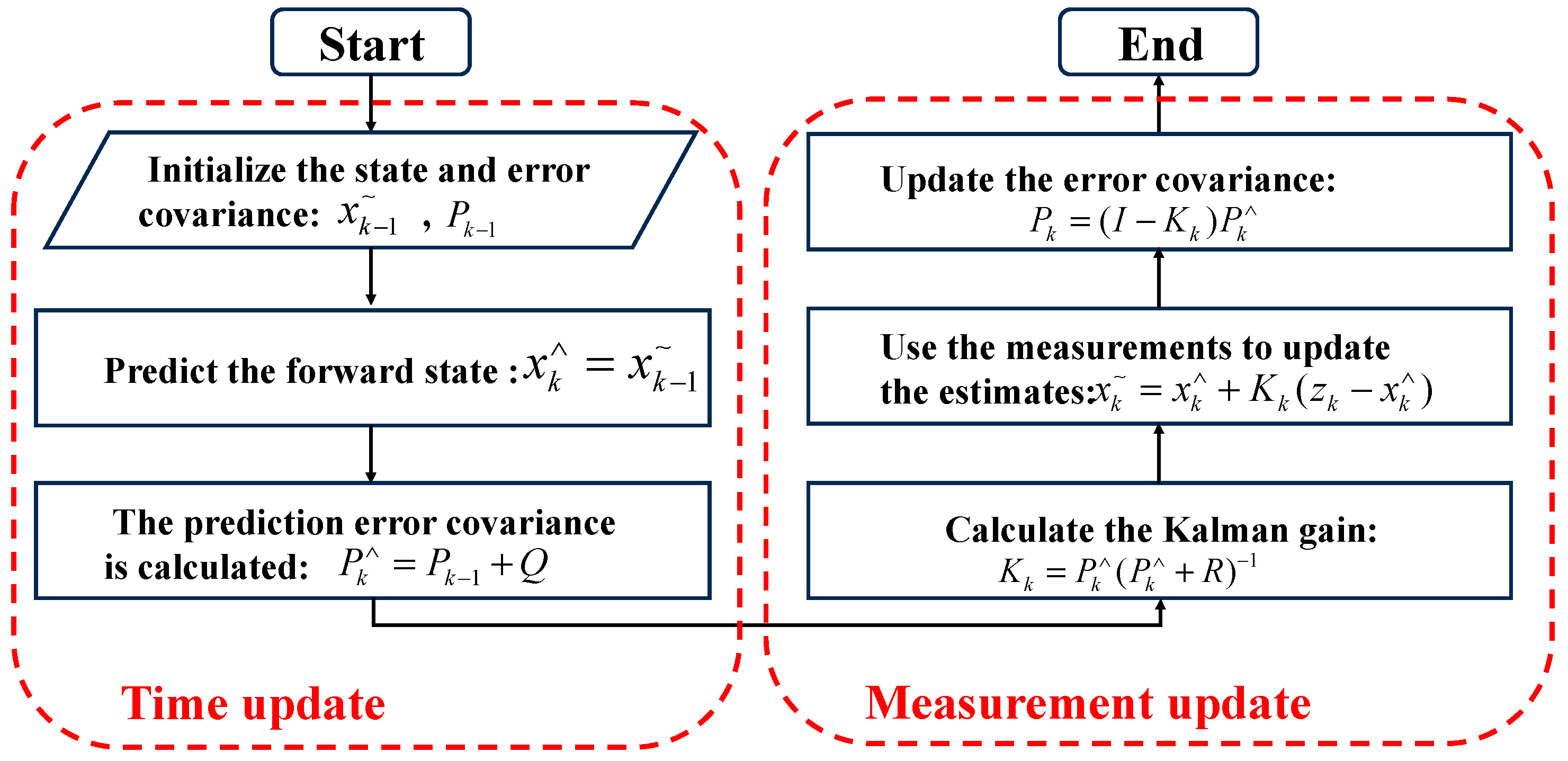
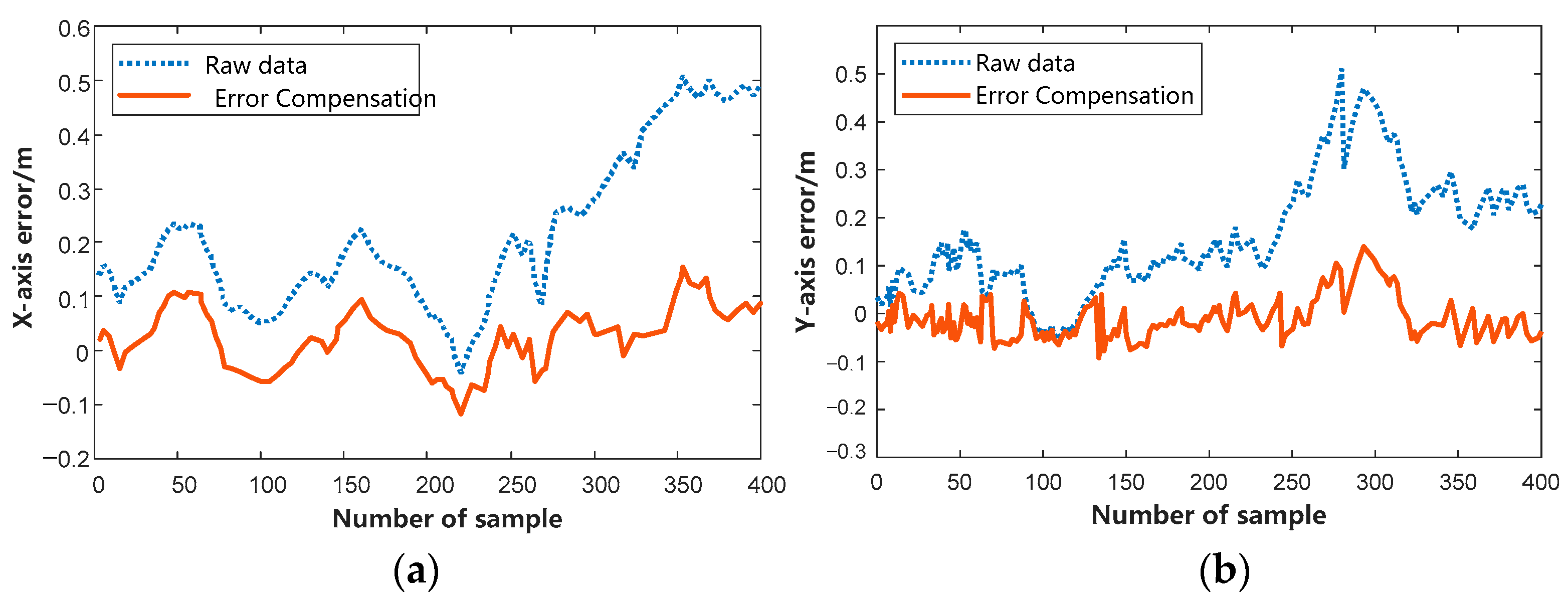
2.3. Clutter Reduction Method Based on Improved Kalman Filter
3. TWPT Positioning and Tracking System
3.1. Improved CLEAN Algorithm for Detection
3.1.1. Traditional CLEAN Detection Algorithm
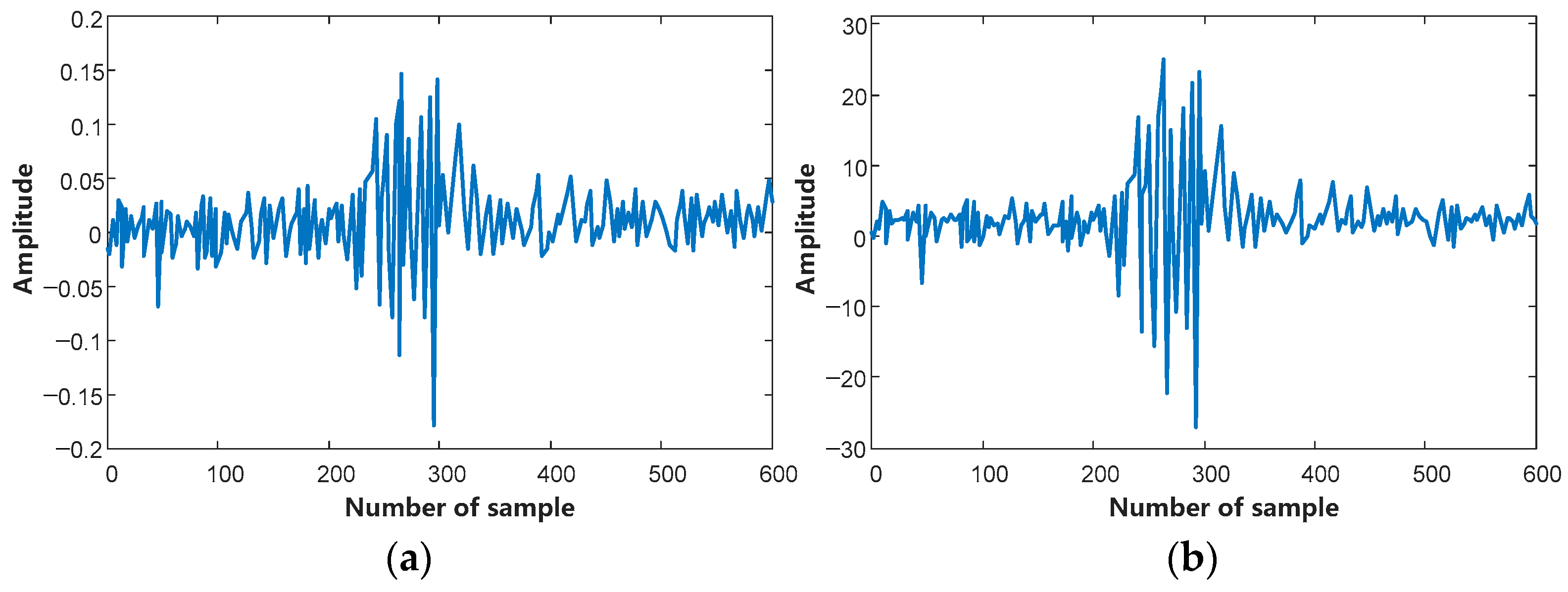
3.1.2. CLEAN Detection Algorithm with Compensation for TWPT Systems
3.2. Localization and Trajectory Tracking Algorithm Based on Position Fusion with Multi-IR-UWB Radar
3.2.1. Based on Three-Point Localization Modeling
3.2.2. Three-Point Localization Estimation Algorithm Based on a Multi IR-UWB Radar
| Algorithm 1. Localization and Trajectory Tracking Algorithm Based on Position Information Fusion with Multi-IR-UWB Radar |
| 1: Procedure Function targetTracking |
| 2: , , ;←Target distance envelope for 3 devices |
| 3: , , ; ←3 device location coordinates |
| 4: ←Human modeling radius |
| 5: ←Trajectory filter sliding window size |
| 6: ; |
| 7: calculate ; Calculate the true target distance |
| 8: For |
| 9: calculate |
| 10: Solving for target position |
| 11: EndFor |
| 12: Trajectory filtering |
| 13: Return Target 2D trajectory |
| 14: End procedure |
4. Experimental Results and Analysis
4.1. Data Collection
4.2. Performance Evaluation
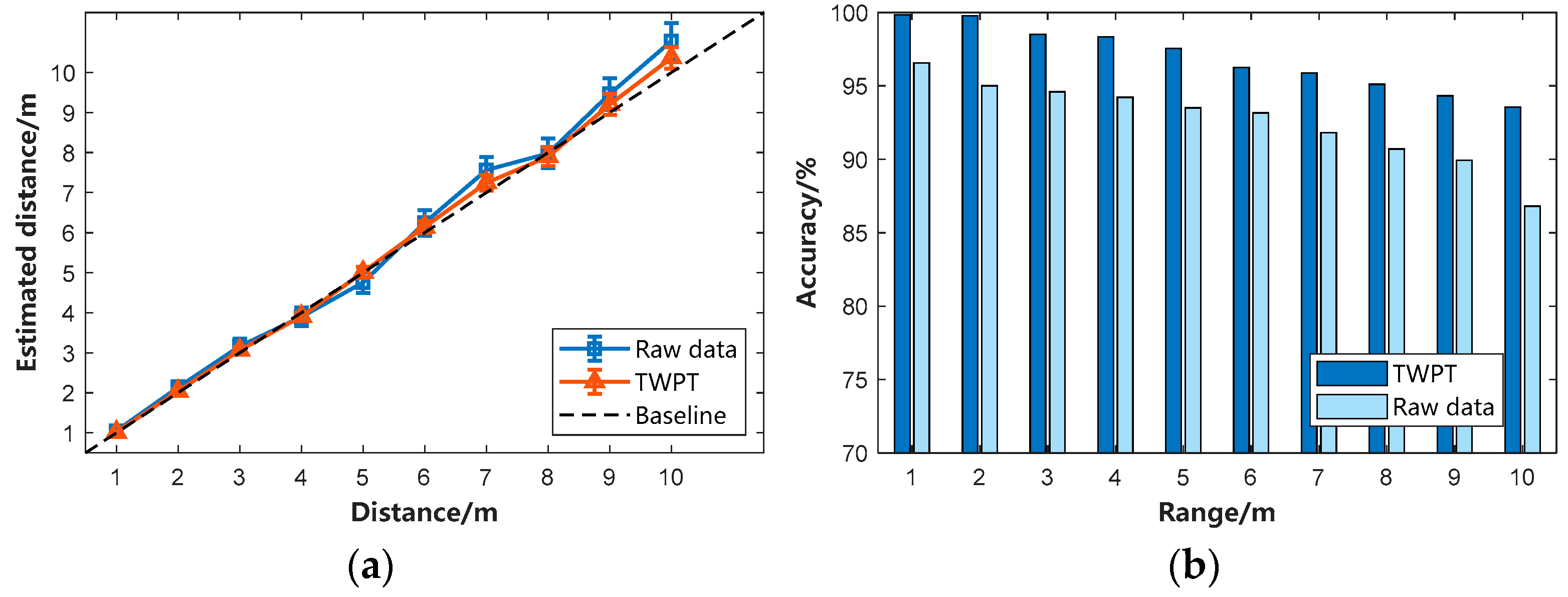
4.2.1. Accuracy of TWPT Positioning System
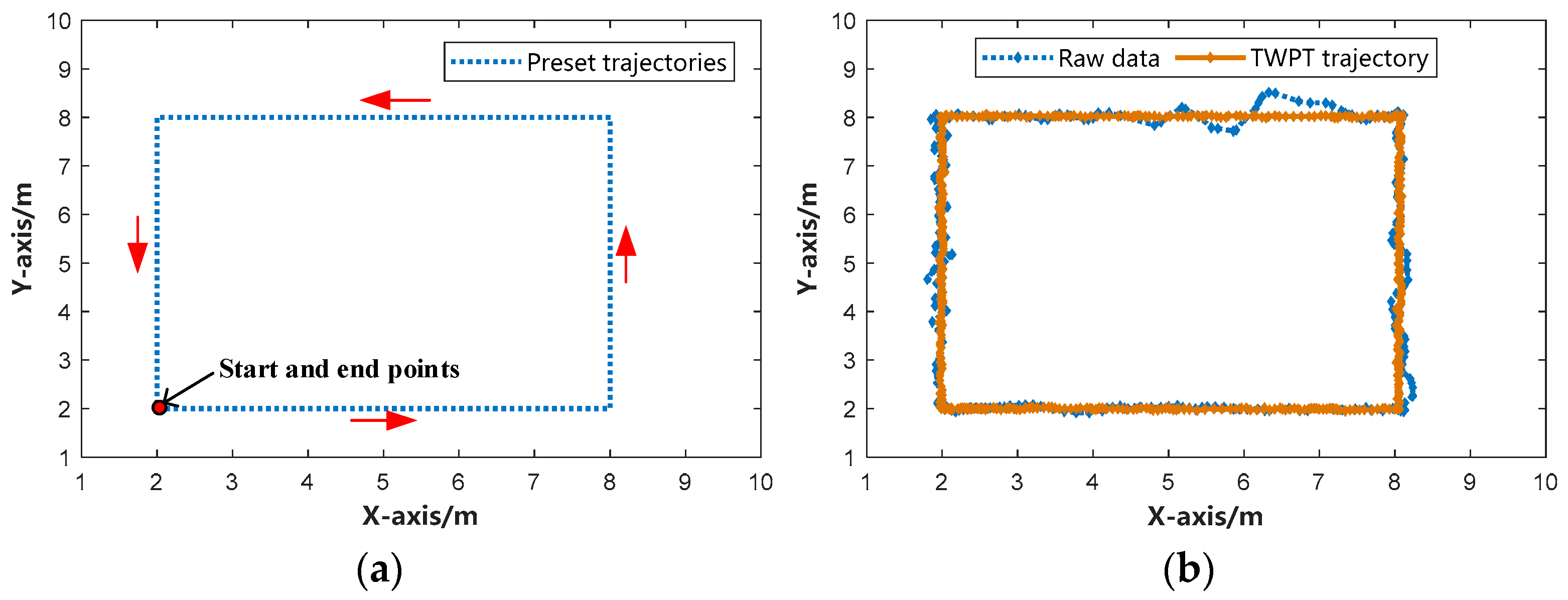
4.2.2. TWPT System Overall Trajectory Error
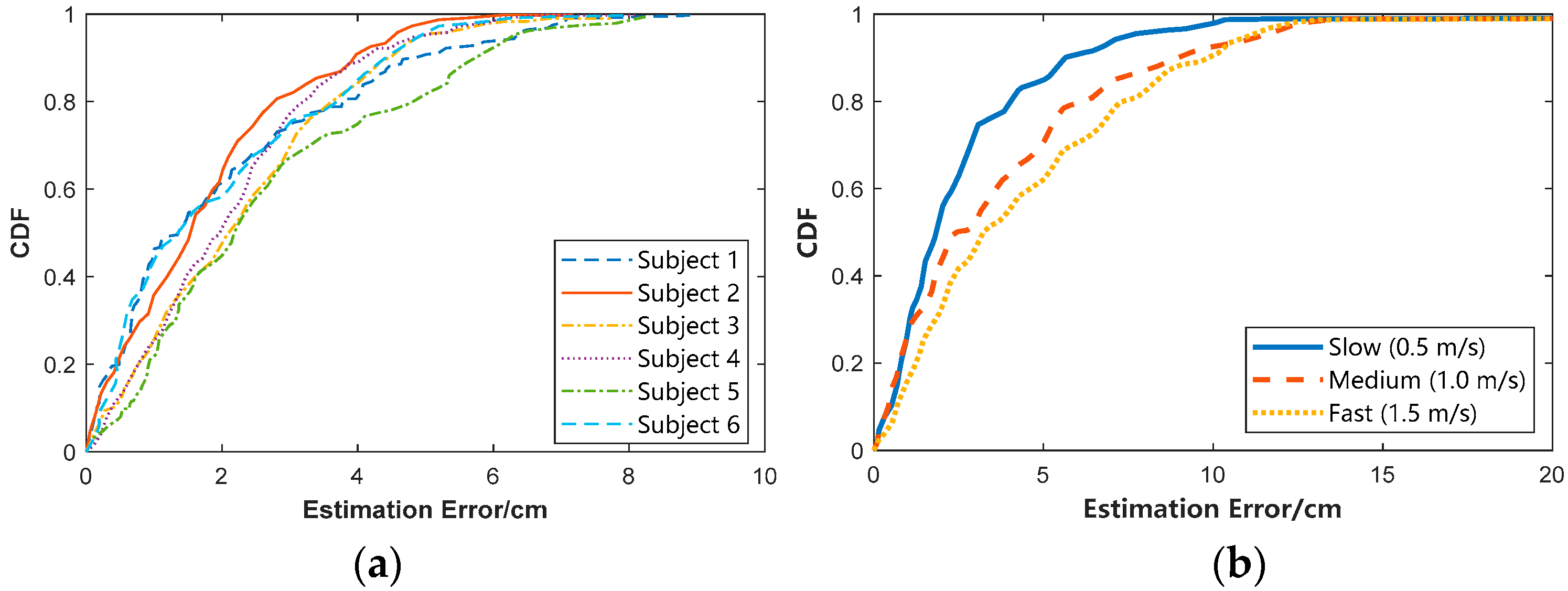
4.2.3. Effects of Subjects and Walking Speed on the TWPT System
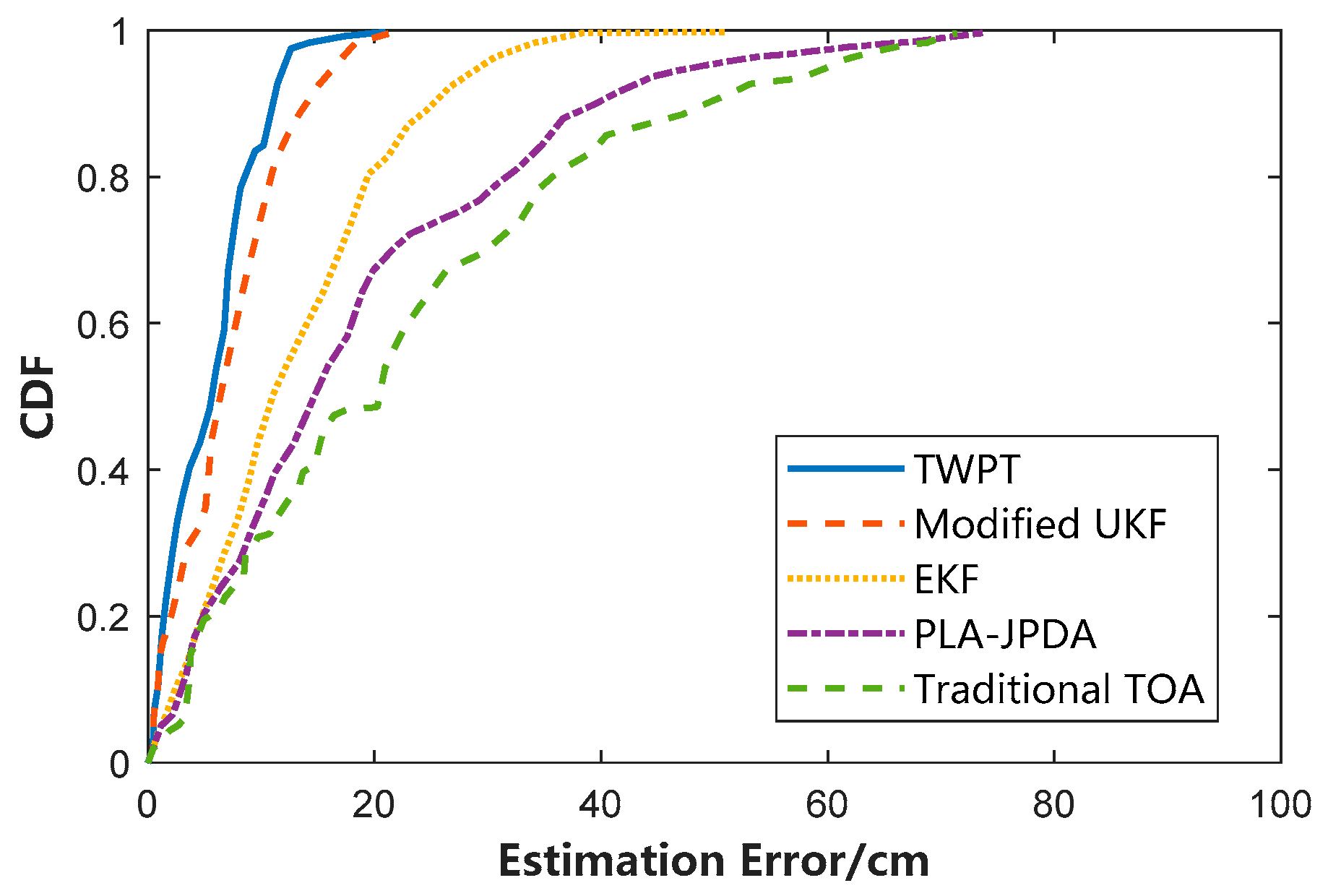
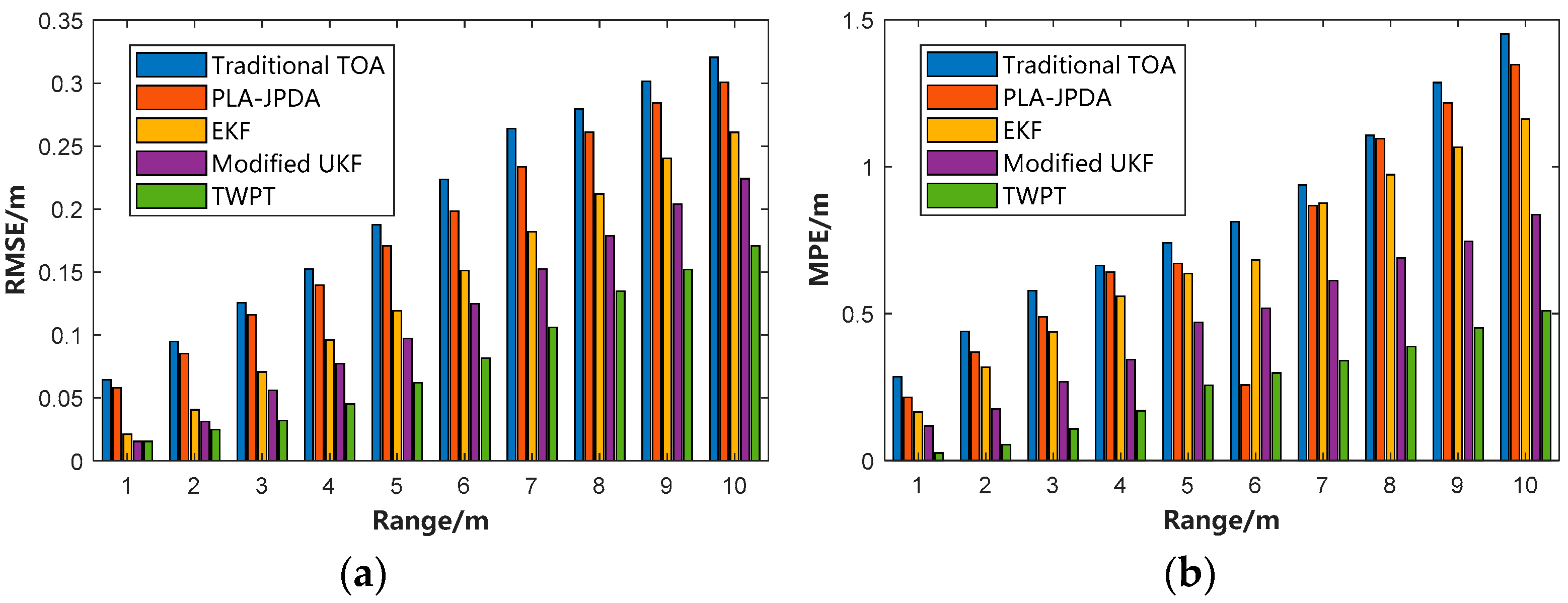
4.2.4. Performance Comparison of Different Localization Tracking Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, J.; Tao, D. Empowering things with intelligence: A survey of the progress, challenges, and opportunities in artificial intelligence of things. IEEE Internet Things J. 2020, 8, 7789–7817. [Google Scholar] [CrossRef]
- Feng, S.; Sun, H.; Yan, X.; Zhu, H.; Zou, Z.; Shen, S.; Liu, H.X. Dense reinforcement learning for safety validation of autonomous vehicles. Nature 2023, 615, 620–627. [Google Scholar] [CrossRef] [PubMed]
- Hamed, Y.; O’Donnell, G.; Lishchenko, N.; Munina, I. Strain Sensing Technology to Enable Next-Generation Industry and Smart Machines for the Factories of the Future: A Review. IEEE Sens. J. 2023, 23, 25618–25649. [Google Scholar] [CrossRef]
- Singh, J.; Tyagi, N.; Singh, S.; Ali, F.; Kwak, D. A Systematic Review of Contemporary Indoor Positioning Systems: Taxonomy, Techniques, and Algorithms. IEEE Internet Things J. 2024, 18, 1. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Pyun, J.Y. Location detection and tracking of moving targets by a 2D IR-UWB radar system. Sensors 2015, 15, 6740–6762. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Decarli, N.; Guidi, F.; Dardari, D. A novel joint RFID and radar sensor network for passive localization: Design and performance bounds. IEEE J. Sel. Top. Signal Process. 2013, 8, 80–95. [Google Scholar] [CrossRef]
- Fontana, R.J. Recent system applications of short-pulse ultra-wideband (UWB) technology. IEEE Trans. Microw. Theory Tech. 2004, 52, 2087–2104. [Google Scholar] [CrossRef]
- Park, C.; Kim, H.; Moon, N. Unauthorized person tracking system in video using CNN-LSTM based location positioning. J. Korea Soc. Comput. Inf. 2021, 26, 77–84. [Google Scholar]
- Oh, S.H.; Maeng, J.H. Improvement of location positioning using KNN, Local Map Classification and Bayes Filter for indoor location recognition system. J. Korea Soc. Comput. Inf. 2021, 26, 29–35. [Google Scholar]
- Saab, S.S.; Nakad, Z.S. A standalone RFID indoor positioning system using passive tags. IEEE Trans. Ind. Electron. 2010, 58, 1961–1970. [Google Scholar] [CrossRef]
- Werner, M.; Kessel, M.; Marouane, C. Indoor positioning using smartphone camera. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; IEEE: New York, NY, USA, 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Feldmann, S.; Kyamakya, K.; Zapater, A.; Lue, Z. An Indoor Bluetooth-Based Positioning System: Concept, Implementation and Experimental Evaluation. In Proceedings of the International Conference on Wireless Networks, New Orleans, LA, USA, 16–20 March 2003; IEEE: New York, NY, USA, 2003; p. 272. [Google Scholar]
- Dabove, P.; Di Pietra, V.; Piras, M.; Jabbar, A.A.; Kazim, S.A. Indoor positioning using Ultra-wide band (UWB) technologies: Positioning accuracies and sensors’ performances. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; IEEE: New York, NY, USA, 2018; pp. 175–184. [Google Scholar]
- wei Zhao, X.; Gaugue, A.; Lièbe, C.; Khamlichi, J.; Ménard, M. Through the wall detection and localization of a moving target with a bistatic UWB radar system. In Proceedings of the 7th European Radar Conference, Paris, France, 30 September–1 October 2010; IEEE: New York, NY, USA, 2010; pp. 204–207. [Google Scholar]
- Qian, H.; Yang, X.; Zhang, X.; Ding, Y.; Zhang, L. PLA-JPDA for indoor multi-person tracking using IR-UWB radars. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; IEEE: New York, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Bocus, M.J.; Piechocki, R.J. Passive unsupervised localization and tracking using a multi-static UWB radar network. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Slimane, Z.; Nouali, I.Y.; Abdelmalek, A. Modified UKF for accurate indoor UWB multi-target tracking in the context of SαS NLOS model. Int. J. Sens. Netw. 2024, 44, 193–202. [Google Scholar] [CrossRef]
- Sobhani, B.; Mazzotti, M.; Paolini, E.; Giorgetti, A.; Chiani, M. Multiple target detection and localization in UWB multistatic radars. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; IEEE: New York, NY, USA, 2014; pp. 135–140. [Google Scholar]
- Giorgetti, A.; Chiani, M. Time-of-arrival estimation based on information theoretic criteria. IEEE Trans. Signal Process. 2013, 61, 1869–1879. [Google Scholar] [CrossRef]
- Kocur, D.; Švecová, M.; Rovňáková, J. Through-the-wall localization of a moving target by two independent ultra wideband (UWB) radar systems. Sensors 2013, 13, 11969–11997. [Google Scholar] [CrossRef] [PubMed]
- Sobhani, B.; Paolini, E.; Giorgetti, A.; Mazzotti, M.; Chiani, M. Target tracking for UWB multistatic radar sensor networks. IEEE J. Sel. Top. Signal Process. 2013, 8, 125–136. [Google Scholar] [CrossRef]
- Hashemi, H. Impulse response modeling of indoor radio propagation channels. IEEE J. Sel. Areas Commun. 1993, 11, 967–978. [Google Scholar] [CrossRef]
- Sahinoglu, Z.; Gezici, S.; Güvenc, I. Ultra-Wideband Positioning Systems: Theoretical Limits, Ranging Algorithms, and Protocols; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Rovnáková, J.; Svecova, M.; Kocur, D.; Nguyen, T.T.; Sachs, J. Signal processing for through wall moving target tracking by M-sequence UWB radar. In Proceedings of the 2008 18th International Conference Radioelektronika, Prague, Czech Republic, 24–25 April 2008; IEEE: New York, NY, USA, 2008; pp. 1–4. [Google Scholar]
- Cristani, M.; Farenzena, M.; Bloisi, D.; Murino, V. Background subtraction for automated multisensor surveillance: A comprehensive review. EURASIP J. Adv. Signal Process. 2010, 2010, 1–24. [Google Scholar] [CrossRef]
- Abujarad, F.; Jostingmeier, A.; Omar, A.S. Clutter removal for landmine using different signal processing techniques. In Proceedings of the Tenth International Conference on Grounds Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; IEEE: New York, NY, USA, 2004; pp. 679–700. [Google Scholar]
- Sabushimike, D.; Na, S.Y.; Kim, J.Y.; Bui, N.N.; Seo, K.S.; Kim, G.G. Low-rank matrix recovery approach for clutter rejection in real-time IR-UWB radar-based moving target detection. Sensors 2016, 16, 1409. [Google Scholar] [CrossRef]
- Zetik, R.; Crabbe, S.; Krajnak, J.; Peyerl, P.; Sachs, J.; Thomä, R. Detection and localization of persons behind obstacles using M-sequence through-the-wall radar. In Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security and Homeland Defense V, Proceedings of the Defense and Security Symposium 2006, Orlando, FL, USA, 17–21 April 2006; SPIE: St. Bellingham, WA, USA, 2006; Volume 6201, pp. 145–156. [Google Scholar]
- Singh, S.; Liang, Q.; Chen, D.; Sheng, L. Sense through wall human detection using UWB radar. EURASIP J. Wirel. Commun. Netw. 2011, 20, 1–11. [Google Scholar] [CrossRef]
- Immoreev, I.I. Feature Detection in UWB Radar Signals. In Ultra-Wideband Radar Technology; CRC Press: Boca Raton, FL, USA, 2018; pp. 21–46. [Google Scholar]
- Liang, Q.; Zhang, B.; Wu, X. UWB radar for target detection: DCT versus matched filter approaches. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; IEEE: New York, NY, USA, 2012; pp. 1435–1439. [Google Scholar]
- Kocur, D.; Gamec, J.; Svecova, M.; Gamcová, M.; Rovnakova, J. Imaging method: An efficient algorithm for moving target tracking by UWB radar. Acta Polytech. Hung. 2010, 7, 5–24. [Google Scholar]
- Chang, S.; Sharan, R.; Wolf, M.; Mitsumoto, N.; Burdick, J.W. People tracking with UWB radar using a multiple-hypothesis tracking of clusters (MHTC) method. Int. J. Soc. Robot. 2010, 2, 3–18. [Google Scholar] [CrossRef]
- Gezici, S.; Tian, Z.; Giannakis, G.B.; Kobayashi, H.; Molisch, A.F.; Poor, H.V.; Sahinoglu, Z. Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Process. Mag. 2005, 22, 70–84. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering: With MATLAB Exercises and Solutions; John Wiley & Sons: Hoboken, NJ, USA, 1997. [Google Scholar]
- Irahhauten, Z.; Nikookar, H.; Janssen, G.J. An overview of ultra wide band indoor channel measurements and modeling. IEEE Microw. Wirel. Compon. Lett. 2004, 14, 386–388. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Clutter-Reduction Method | RMSE |
|---|---|
| Traditional KF algorithm | 0.1032 |
| Exponential average | 0.2075 |
| SVD | 0.1393 |
| TWPT | 0.0883 |
| IR-UWB Radar Parameters | Value |
|---|---|
| Detecting range | 10 m |
| Bandwidth | 1.42 GHz |
| Sampling rate | 23.3 GHz |
| Carrier frequency | 7.3 GHz |
| Elevation | [−70, +70] |
| Azimuth | [−70, +70] |
| Volunteer | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| Gender | Male | Male | Male | Female | Female | Female |
| Height(cm) | 175 | 183 | 169 | 165 | 171 | 167 |
| Weight(kg) | 80 | 83 | 72 | 51 | 57 | 61 |
| Distance | 1 m | 2 m | 3 m | 4 m | 5 m | 6 m | 7 m | 8 m | 9 m | 10 m | Average |
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE(m) | 0.015 | 0.024 | 0.032 | 0.044 | 0.062 | 0.081 | 0.106 | 0.134 | 0.152 | 0.170 | 0.082 |
| MPE(m) | 0.025 | 0.053 | 0.107 | 0.169 | 0.255 | 0.298 | 0.340 | 0.387 | 0.450 | 0.509 | 0.259 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Dang, X.; Hao, Z. TWPT: Through-Wall Position Detection and Tracking System Using IR-UWB Radar Utilizing Kalman Filter-Based Clutter Reduction and CLEAN Algorithm. Electronics 2024, 13, 3792. https://doi.org/10.3390/electronics13193792
Zhang J, Dang X, Hao Z. TWPT: Through-Wall Position Detection and Tracking System Using IR-UWB Radar Utilizing Kalman Filter-Based Clutter Reduction and CLEAN Algorithm. Electronics. 2024; 13(19):3792. https://doi.org/10.3390/electronics13193792
Chicago/Turabian StyleZhang, Jinlong, Xiaochao Dang, and Zhanjun Hao. 2024. "TWPT: Through-Wall Position Detection and Tracking System Using IR-UWB Radar Utilizing Kalman Filter-Based Clutter Reduction and CLEAN Algorithm" Electronics 13, no. 19: 3792. https://doi.org/10.3390/electronics13193792
APA StyleZhang, J., Dang, X., & Hao, Z. (2024). TWPT: Through-Wall Position Detection and Tracking System Using IR-UWB Radar Utilizing Kalman Filter-Based Clutter Reduction and CLEAN Algorithm. Electronics, 13(19), 3792. https://doi.org/10.3390/electronics13193792