

Research on Hybrid Approach for Maximum Power Point Tracking of Photovoltaic Systems under Various Operating Conditions


Abstract
:1. Introduction
2. Analysis of Photovoltaic Power Generation Principle and Output Characteristics
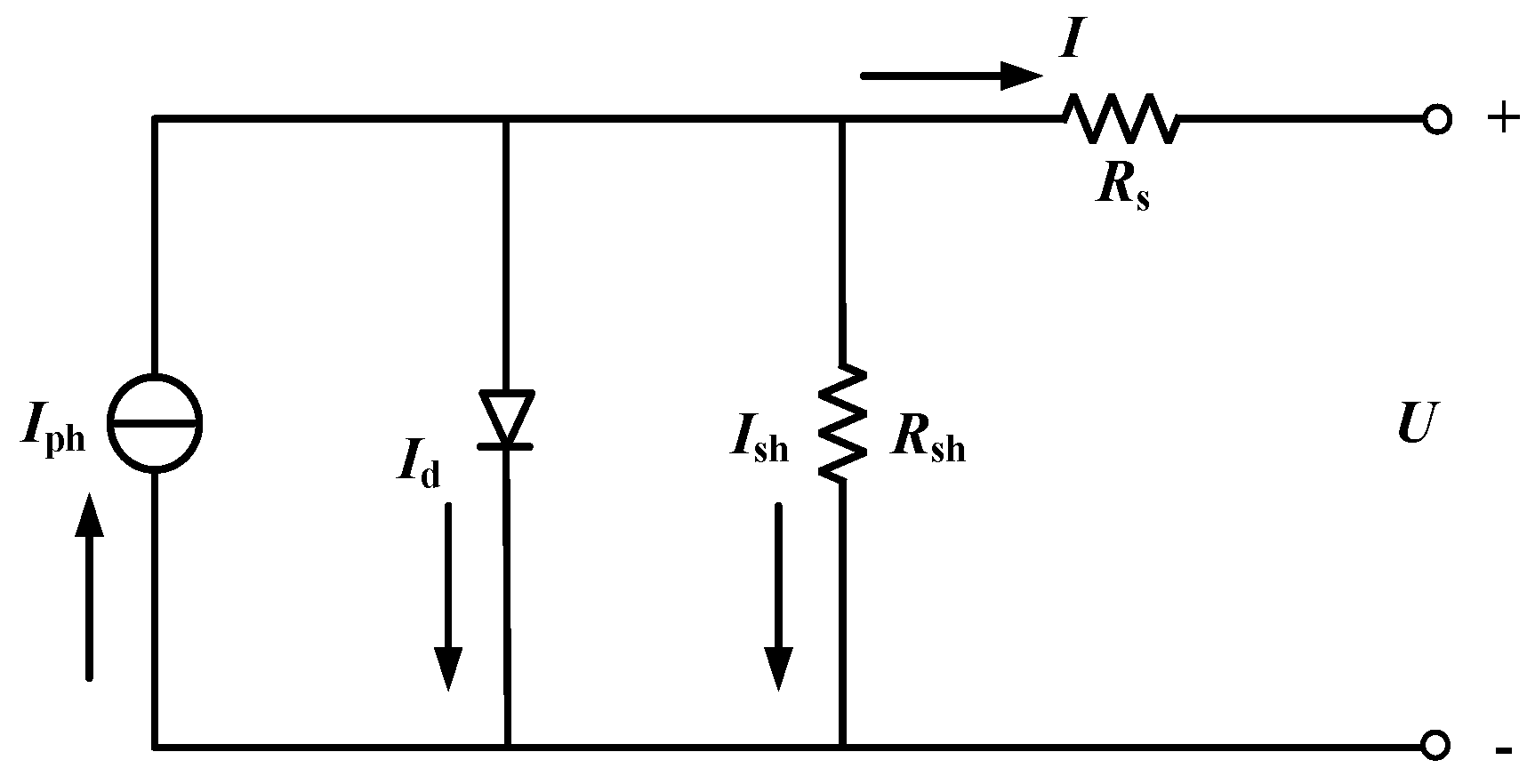
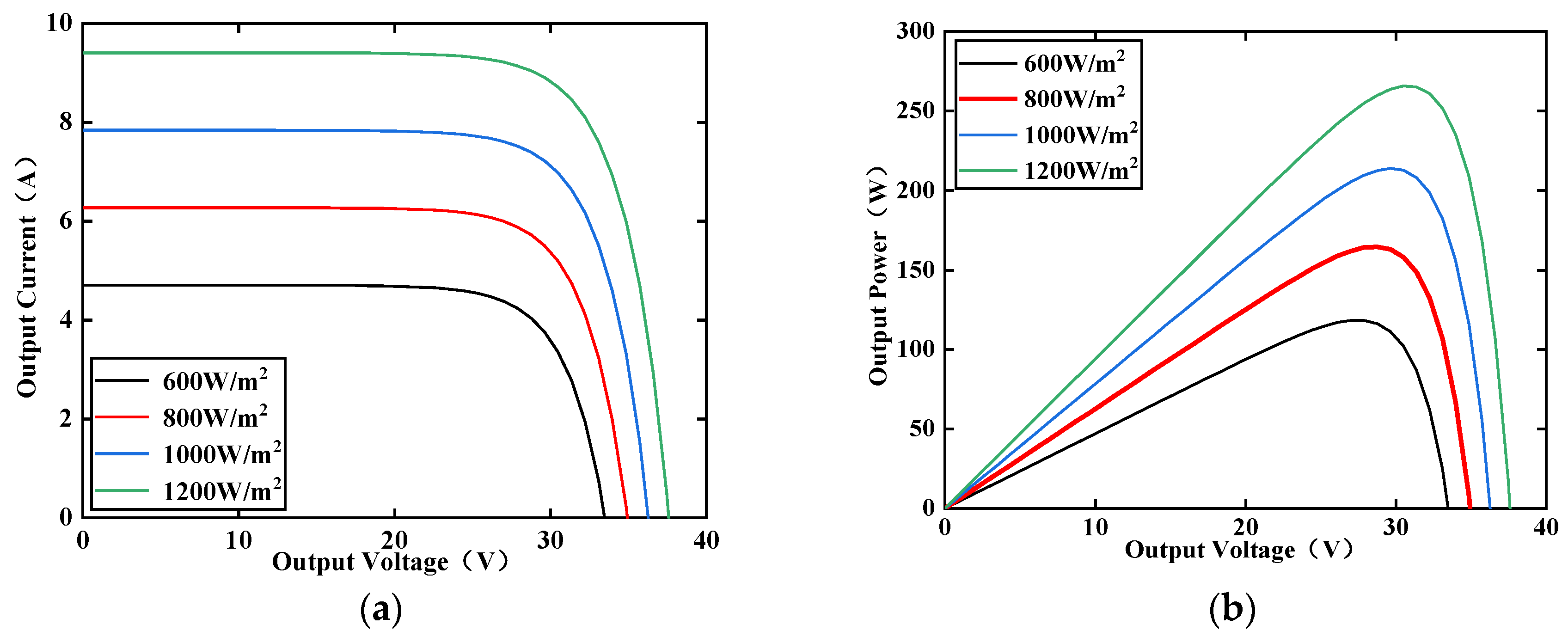
2.1. Mathematical Modeling of Photovoltaic Systems
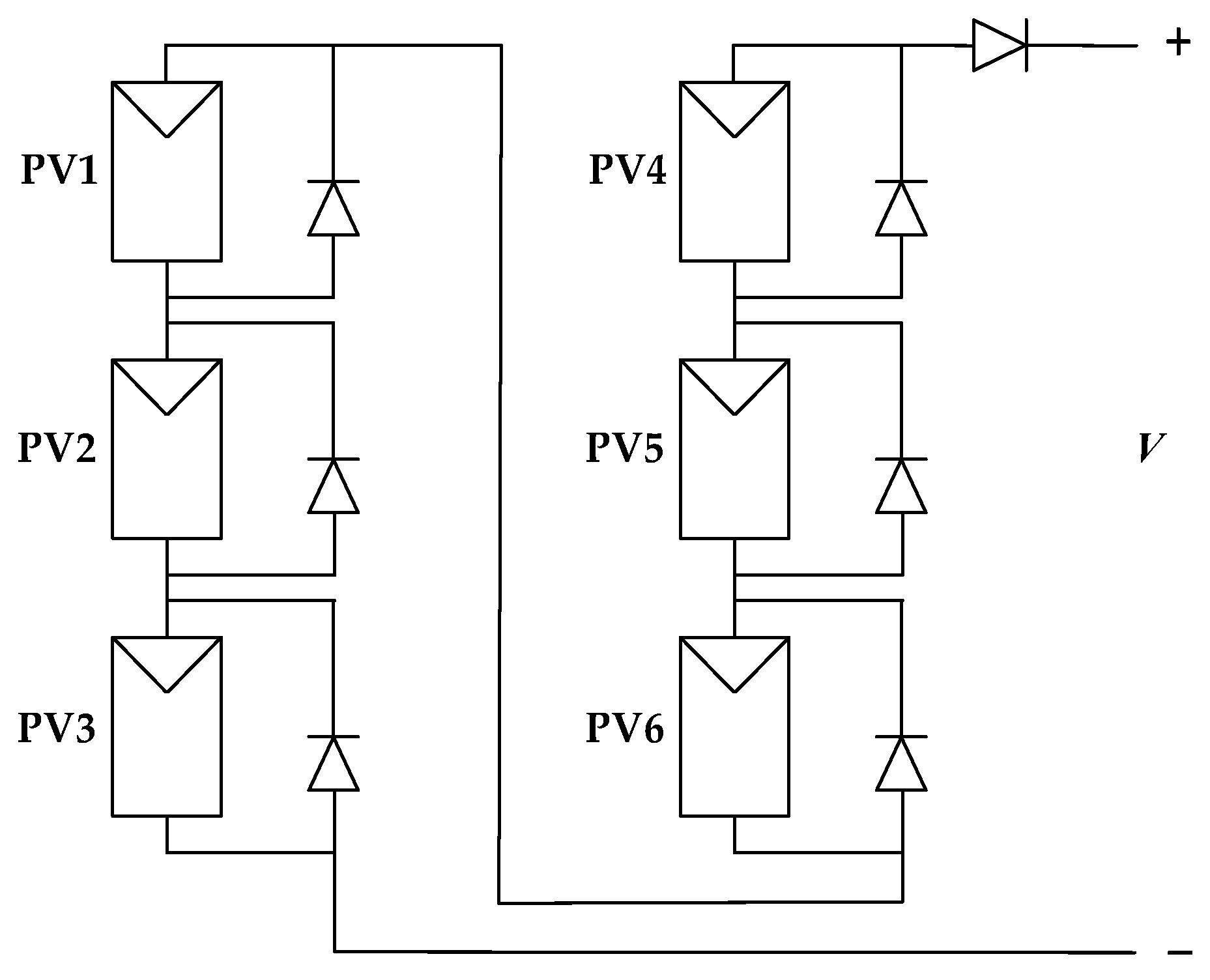
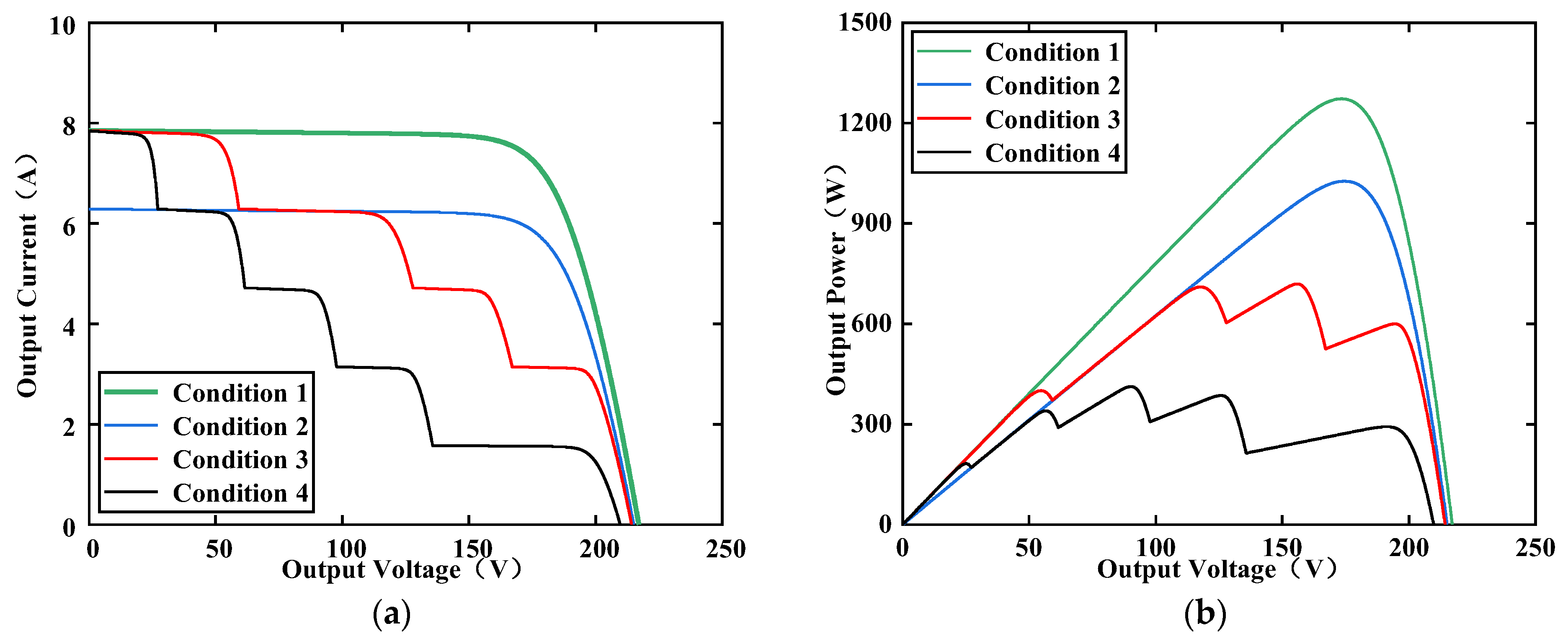
2.2. Multipeak Characterization of 6 × 1 PV Array under Local Shading
3. Improved Chaotic Whale Perturbation and Observation Method for MPPT Control Methods
3.1. P&O Method
3.2. WOA
- (1)
- Random prey searches
- (2)
- Surrounding the prey stage
- (3)
- Bubble-net feeding phase
3.3. ICWOA
- (1)
- Tent chaotic mapping
- (2)
- Nonlinear convergence factor
- (3)
- Introducing Levy Flight
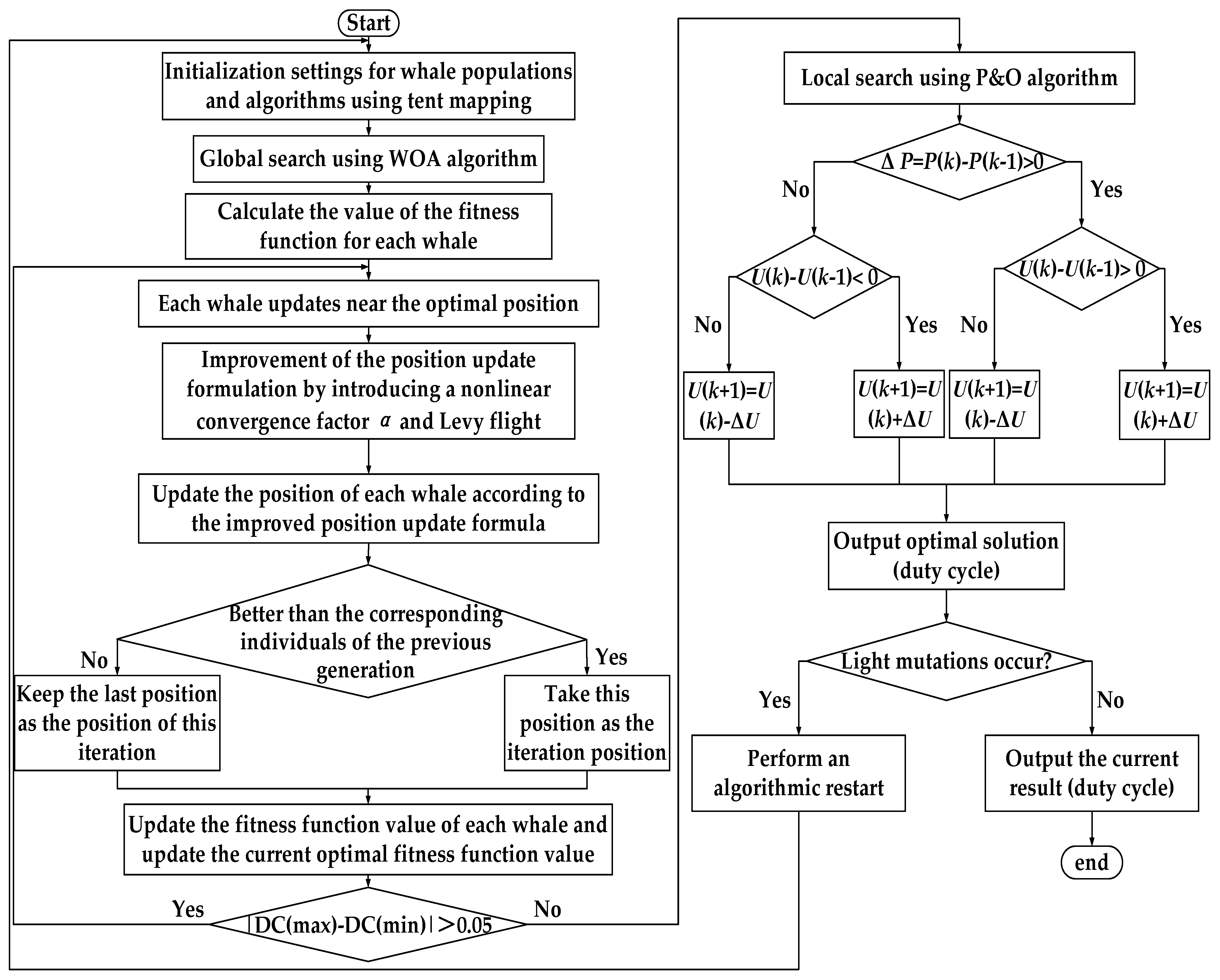
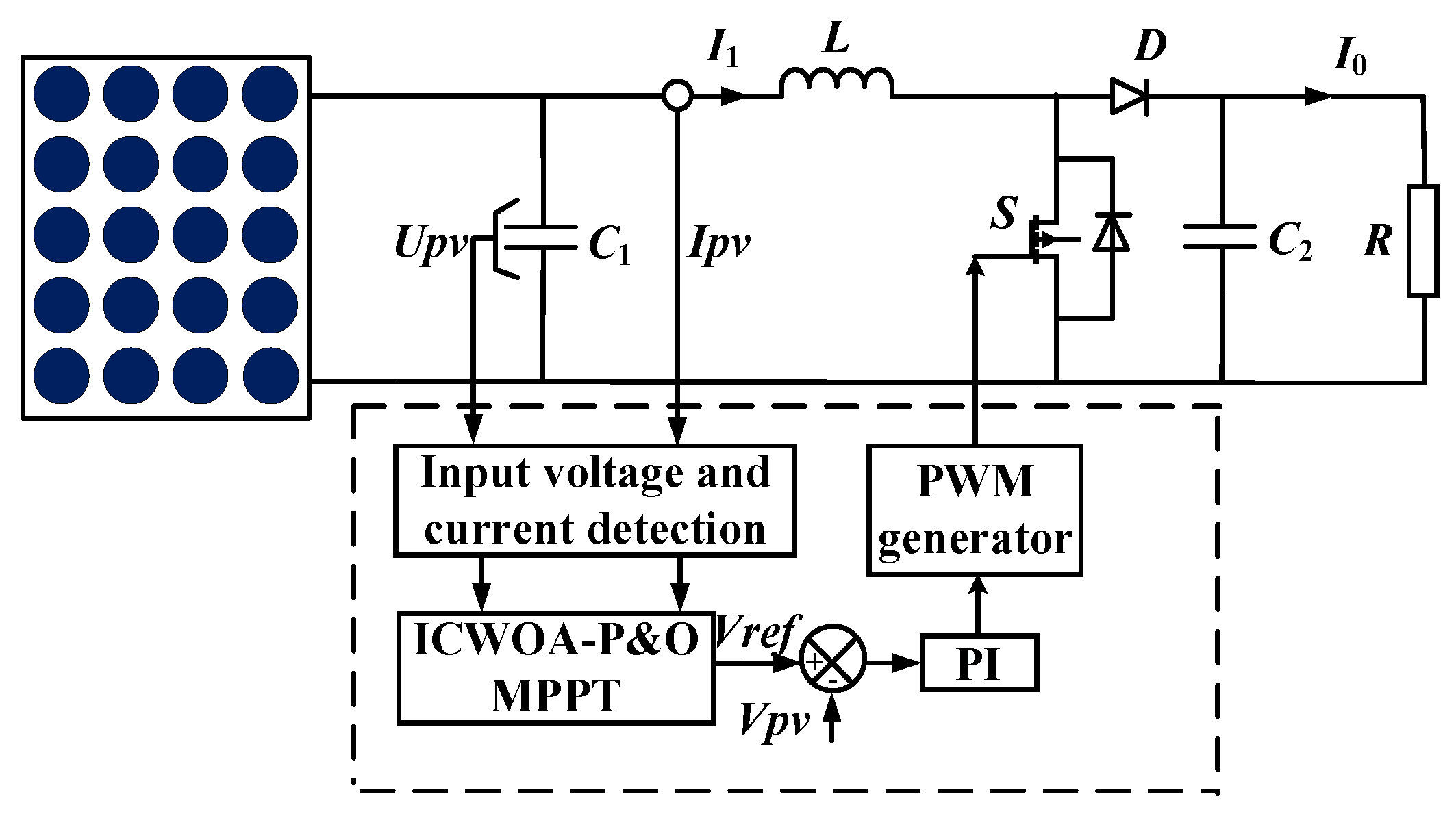
3.4. MPPT Control Method Based on ICWOA-P&O Algorithm
4. Simulation Results and Analysis
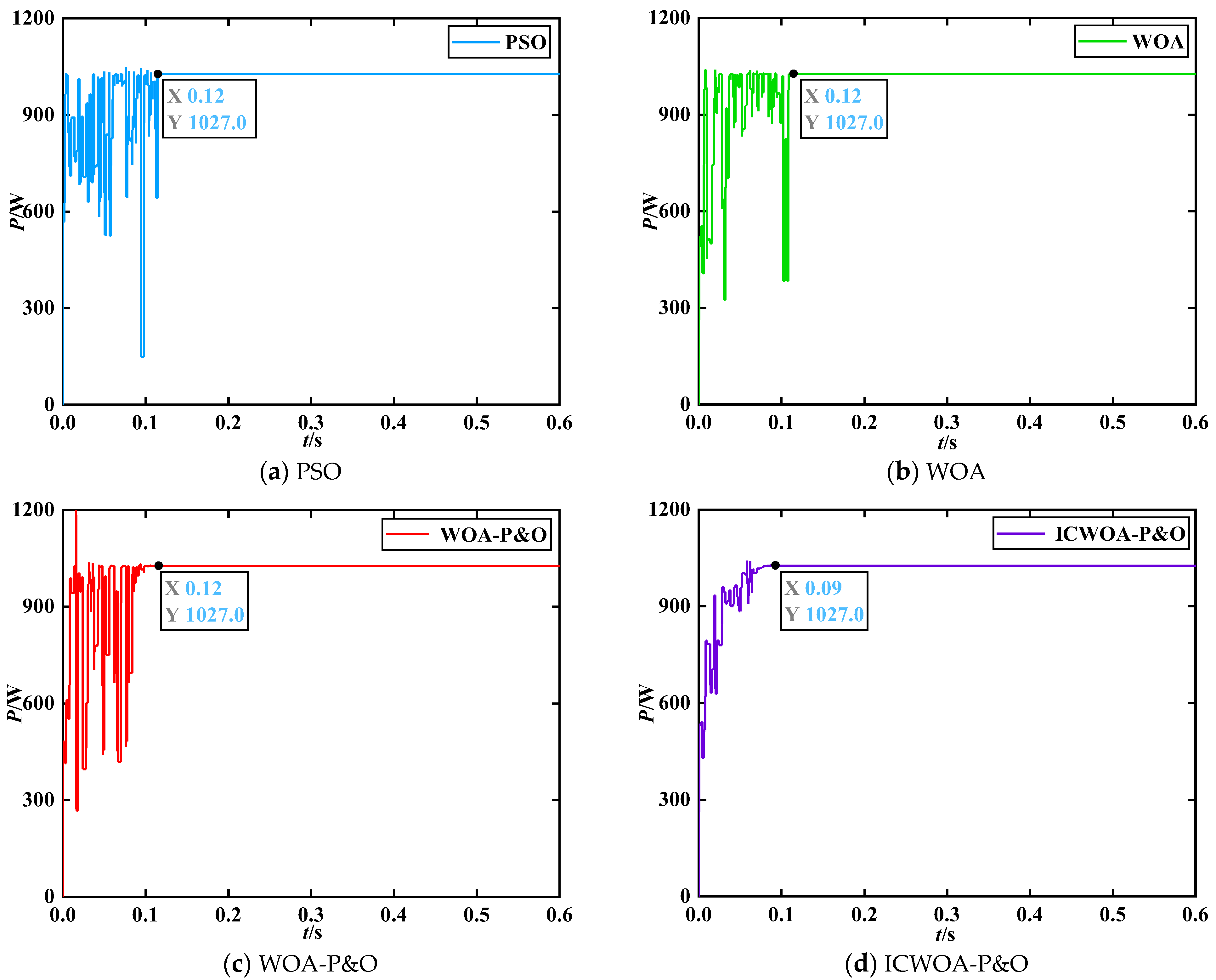
4.1. Simulation Verification and Results Analysis of MPPT Control under Uniform Irradiance
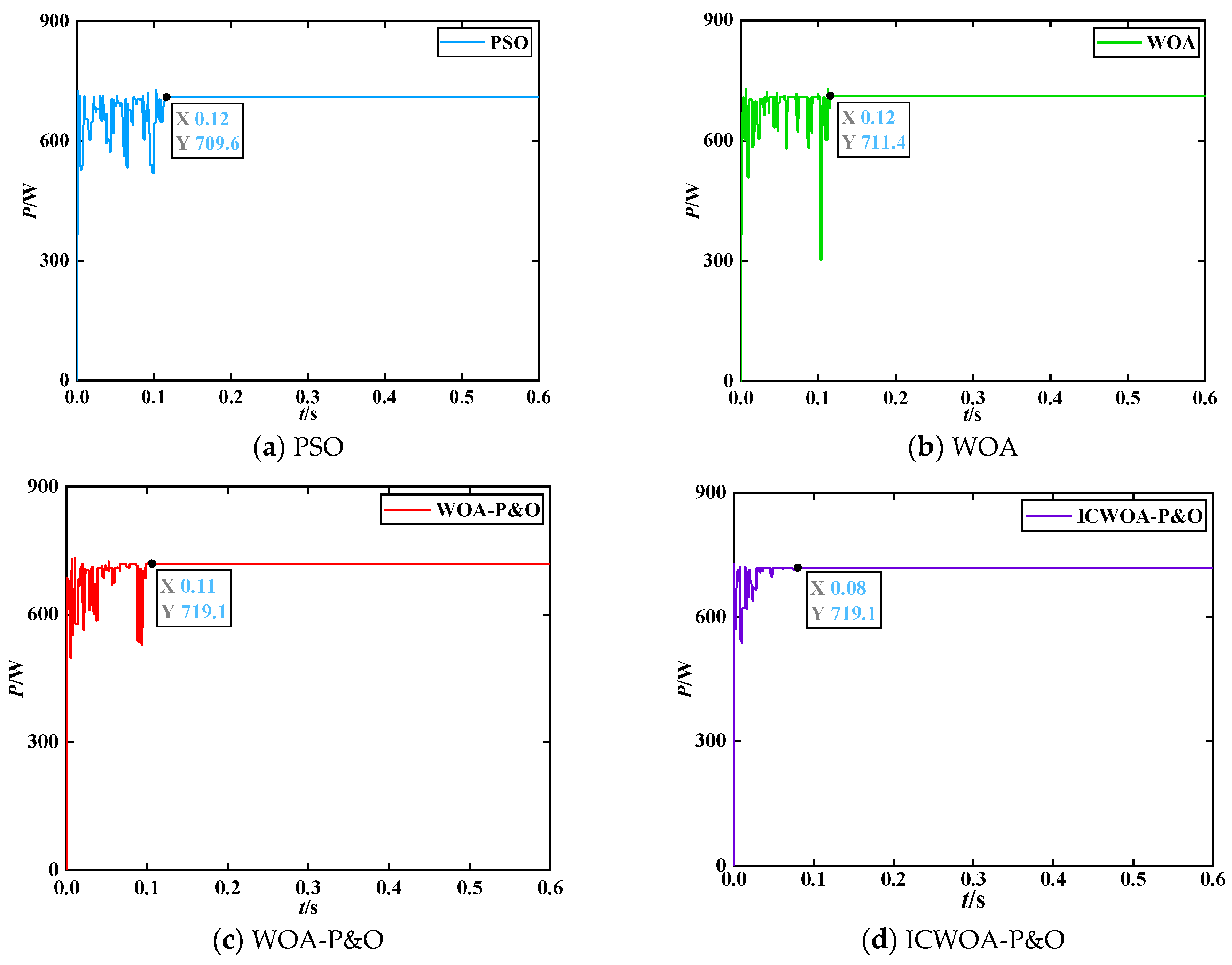
4.2. Simulation Verification and Results Analysis of MPPT Control under Static Local Shading
4.3. Simulation Verification and Results Analysis of MPPT Control under Dynamic Shading
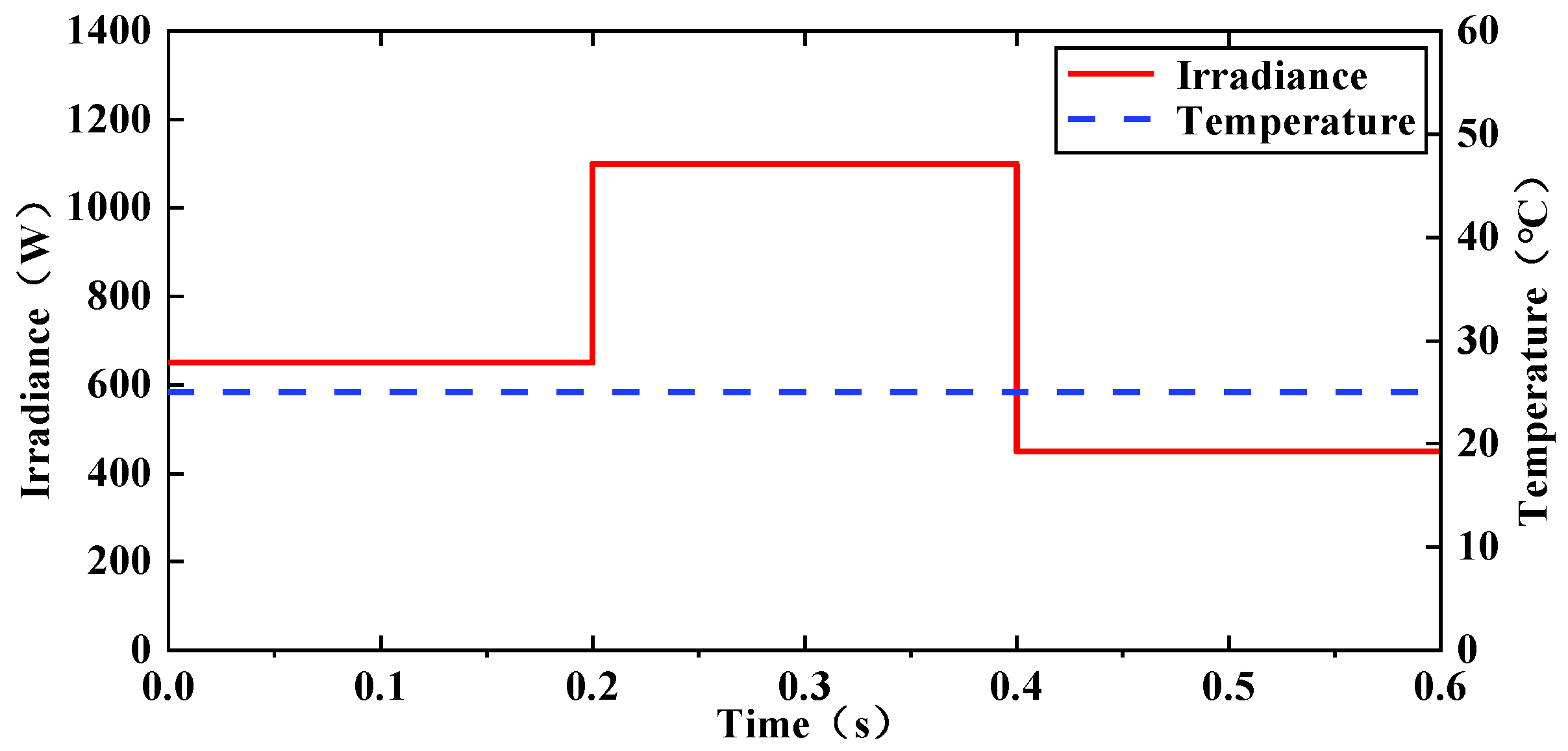
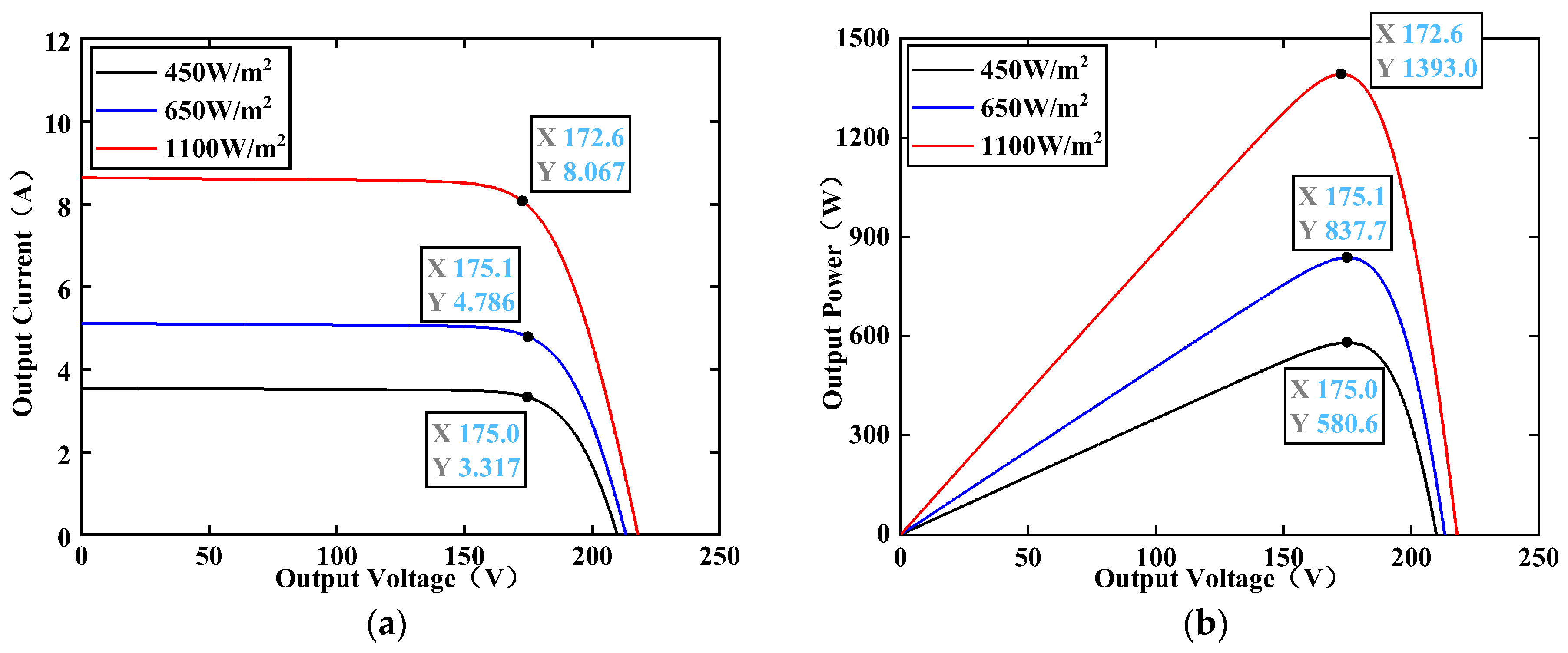
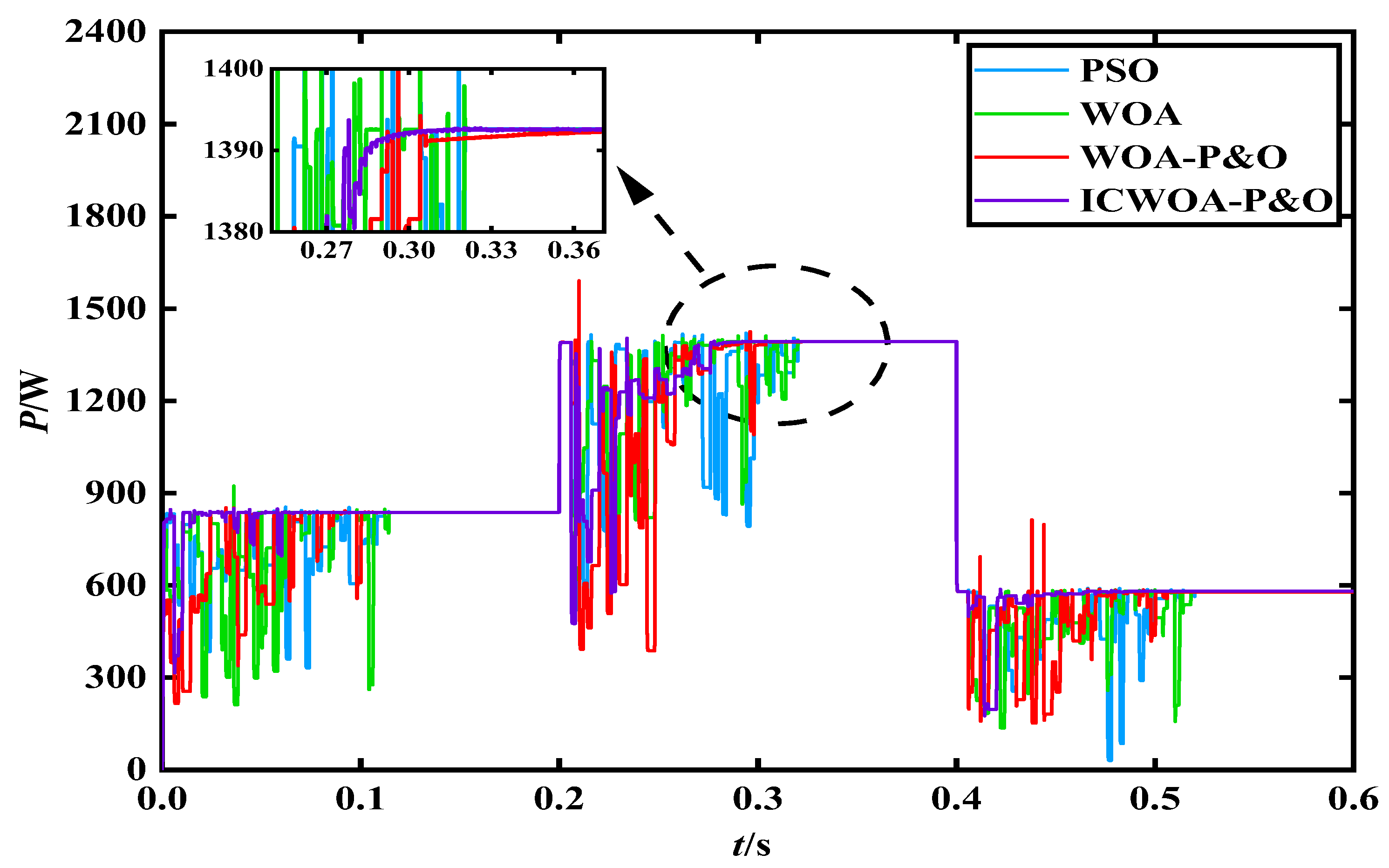
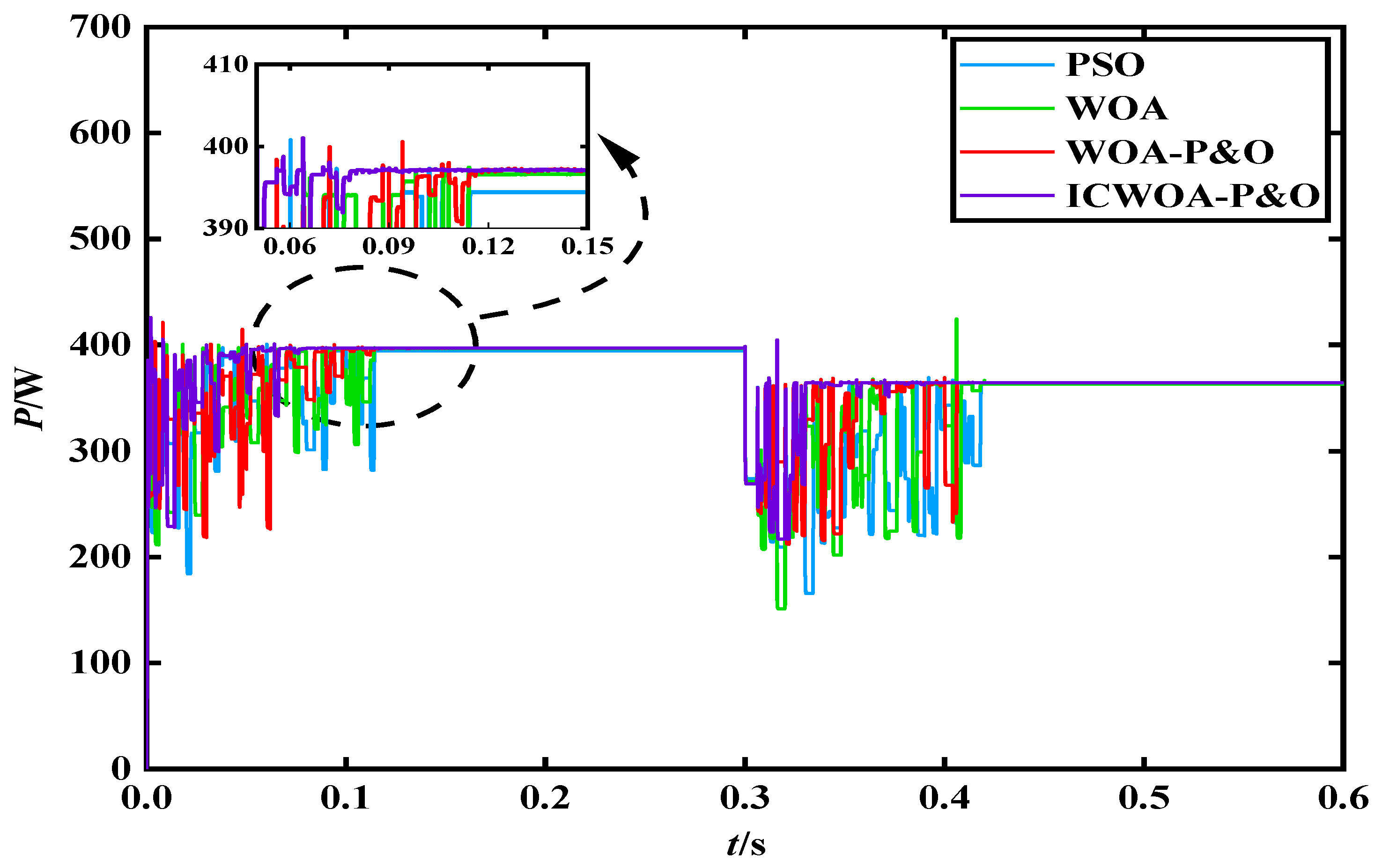
4.4. Simulation Verification and Results of MPPT Control under Sudden Changes in Irradiance and Temperature
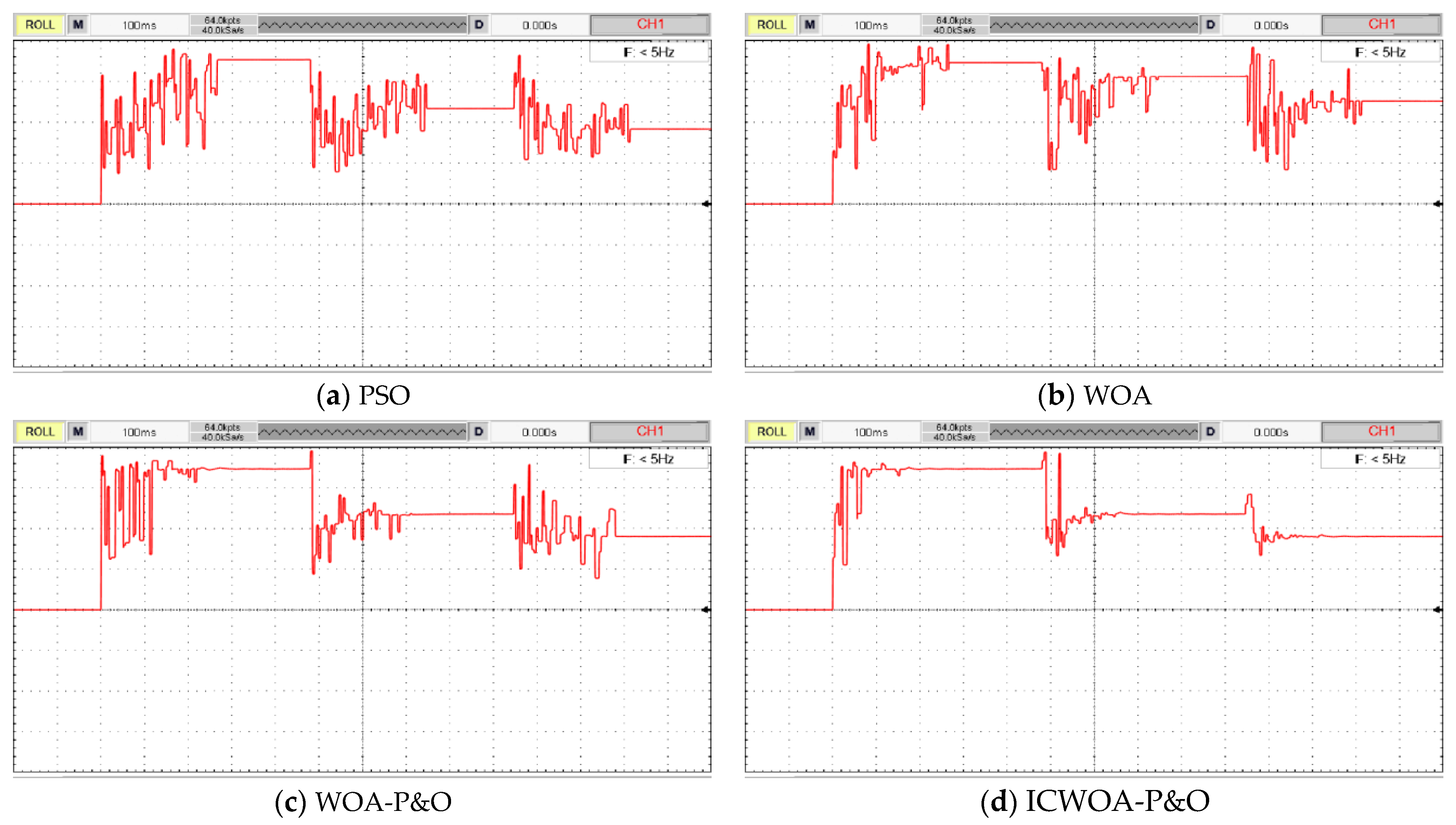
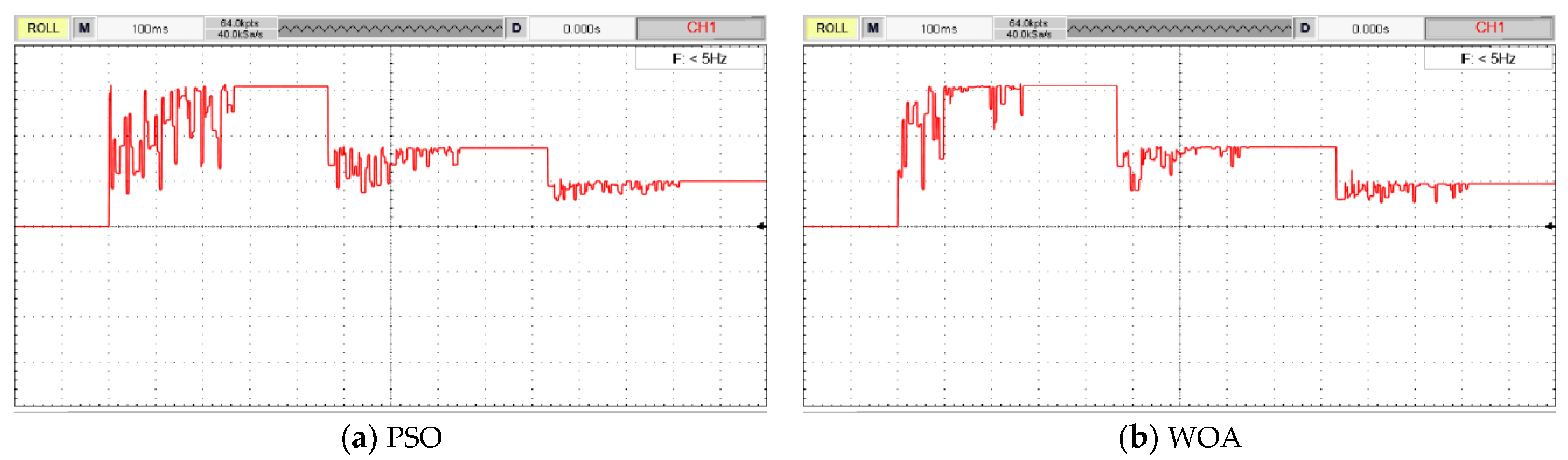
5. Experimental Results
- Photovoltaic Simulator: The PV simulator can set different solar irradiance and temperature conditions to test the adaptability of the MPPT algorithm under various environmental changes.
- Boost Circuit: By varying the duty cycle, the input voltage is controlled to adjust the output current so that the system operates near the MPP.
- DSP Controller: The DSP controller is the core execution unit of the MPPT control algorithm. It runs the MPPT algorithm and calculates and adjusts the duty cycle of the boost converter in real time to track the MPP.
- Transducer: The transducer is used to measure the voltage and current at the output of the PV array in real time, which serves as the basis for MPPT control and algorithm performance evaluation.
- Load: The load simulates the load conditions of the PV system. It is used to observe and analyze the performances and response speeds of the MPPT algorithm under load changes.
- Scopes: Scopes are used in MPPT control experiments to monitor and visualize changes in electrical signals in real time. Through scopes, the signal’s voltage waveforms, power waveforms, transient response, noise and stability, etc., can be observed, thus fully understanding the dynamic behaviors of the MPPT control process.
6. Conclusions
- (1)
- The ICWOA-P&O algorithm can accurately and quickly track the GMPP under changing environmental conditions, with small power oscillation fluctuation, reducing the power loss in the optimization process, thereby improving the photoelectric conversion rate, reducing the power generation cost, and bringing high economic benefits in practical engineering applications.
- (2)
- In terms of tracking speed, the ICWOA-P&O algorithm is significantly enhanced, especially in the case of sudden changes in irradiance or temperature and irradiance simultaneously; the convergence time of the ICWOA-P&O algorithm is less than 0.1 s.
- (3)
- The simulation results under four different conditions demonstrate that the ICWOA-P&O algorithm exhibits excellent performance in fast tracking and significantly reducing oscillations, even under various environmental changes. For instance, the tracking efficiencies of the PSO algorithm and WOA under static partial shading conditions are 98.69% and 98.93%, respectively. In contrast, the proposed hybrid ICWOA-P&O control technique stands out in terms of robustness and steady-state power tracking, with a tracking efficiency close to 100%, showcasing superior performance in trajectory control and tracking.
- (4)
- To further verify the performance of the proposed ICWOA-P&O algorithm, MPPT controller hardware corresponding to the previous model was designed, and an actual PV MPPT control experimental platform was built; the control algorithm was embedded into the MPPT controller for experimental verification.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, F.; Mou, S.; Wei, S.; Qiu, L.; Hu, H.; Zhou, H. Research on the evolution of China’s photovoltaic technology innovation network from the perspective of patents. Energy Strategy Rev. 2024, 51, 101309. [Google Scholar] [CrossRef]
- Li, A.; Liu, W.F.; Li, Y.K.; Gao, C.Y. Research on MPPT control of photovoltaic system based on IP&O-ICS algorithm. J. Sol. Energy 2023, 44, 203–209. [Google Scholar]
- Wang, L.S.; Jiang, S.J.; Wang, J.; Ding, X.C. Optimal control of photovoltaic MPPT algorithm based on hybrid strategy. J. Sol. Energy 2016, 37, 1396–1402. [Google Scholar]
- Zhang, L.; Hurley, W.G.; Wolfle, W.H. A new approach to achieve maximum power point tracking for PV system with a variable inductor. IEEE Trans. Power Electron. 2010, 26, 1031–1037. [Google Scholar] [CrossRef]
- Zhang, S.Z.; Chu, B.Q.; Yuan, X.F.; Guo, L. Research on photovoltaic array model analysis and maximum power point tracking. Autom. Instrum. 2019, 114–116. [Google Scholar] [CrossRef]
- Jia, L.Z.; Chen, K.; Li, G.J.; Feng, L.; Jiang, X.C. Research on MPPT algorithm for photovoltaic arrays under local shadowing conditions. J. Sol. Energy 2014, 35, 1614–1621. [Google Scholar]
- Wu, D.S.; Wang, L.D.; Liu, T.; Meng, X.F. Neural network-based multi-peak MPPT for photovoltaic arrays. Electr. Meas. Instrum. 2019, 56, 69–74. [Google Scholar]
- Fu, W.L.; Meng, J.X.; Zhang, Y.N.; Xu, P. Improved GWO-based PV multi-peak MPPT control under complex shading. J. Sol. Energy 2023, 44, 435–442. [Google Scholar]
- Eltamaly, A.M.; Farh, H.M.H. Dynamic global maximum power point tracking of the PV systems under variant partial shading using hybrid GWO-FLC. Sol. Energy 2019, 177, 306–316. [Google Scholar] [CrossRef]
- Cai, X.Q.; Chen, X.F. Application of improved disturbance observation method in MPPT of photovoltaic power generation. Electron. Test. 2019, 406, 59–60. [Google Scholar]
- Su, Y.G.; Wang, D.C.; Wang, Y.; Jiang, F. Simulation of MPPT control strategy based on improved variable step size conductance increment method. Autom. Technol. Appl. 2019, 38, 11–15. [Google Scholar]
- Laxman, B.; Annamraju, A.; Srikanth, N.V. A grey wolf optimized fuzzy logic based MPPT for shaded solar photovoltaic systems in microgrids. Int. J. Hydrogen Energy 2021, 46, 10653–10665. [Google Scholar] [CrossRef]
- Nassef, A.M.; Houssein, E.H.; Helmy, B.E.; Rezk, H. Modified honey badger algorithm based global MPPT for triple-junction solar photovoltaic system under partial shading condition and global optimization. Energy 2022, 254, 124363. [Google Scholar] [CrossRef]
- Wu, Z.Q.; Cao, B.L.; Hou, L.C.; Hu, X.Y.; Ma, B.Y. Maximum power point tracking of photovoltaic system based on improved multivariate universe optimisation algorithm. J. Electron. Inf. 2021, 43, 3735–3742. [Google Scholar]
- Zafar, M.H.; Khan, N.M.; Mirza, A.F.; Mansoor, M.; Akhtar, N.; Qadir, M.U.; Khan, N.A.; Moosavi, S.K.R. A novel meta-heuristic optimization algorithm based MPPT control technique for PV systems under complex partial shading condition. Sustain. Energy Technol. Assess. 2021, 47, 101367. [Google Scholar]
- Bermejo, J.F.; Fernández, J.F.G.; Polo, F.O.; Márquez, A.C. A review of the use of artificial neural network models for energy and reliability prediction. A study of the solar PV, hydraulic and wind energy sources. Appl. Sci. 2019, 9, 1844. [Google Scholar] [CrossRef]
- Sun, H.; Qiu, C.; Lu, L.; Gao, X.; Chen, J.; Yang, H. Wind turbine power modelling and optimization using artificial neural network with wind field experimental data. Appl. Energy 2020, 280, 115880. [Google Scholar] [CrossRef]
- Chiñas-Palacios, C.; Vargas-Salgado, C.; Aguila-Leon, J.; Hurtado-Pérez, E. A cascade hybrid PSO feed-forward neural network model of a biomass gasification plant for covering the energy demand in an AC microgrid. Energy Convers. Manag. 2021, 232, 113896. [Google Scholar] [CrossRef]
- Farayola, A.M.; Hasan, A.N.; Ali, A. Efficient photovoltaic MPPT system using coarse Gaussian support vector machine and artificial neural network techniques. Int. J. Innov. Comput. Inf. Control (IJICIC) 2018, 14, 323–329. [Google Scholar]
- Ali, M.N. Improved design of artificial neural network for MPPT of grid-connected PV systems. In Proceedings of the 2018 Twentieth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 97–102. [Google Scholar]
- Soufi, Y.; Bechouat, M.; Kahla, S. Fuzzy-PSO controller design for maximum power point tracking in photovoltaic system. Int. J. Hydrogen Energy 2017, 42, 8680–8688. [Google Scholar] [CrossRef]
- Subiyanto, S.; Mohamed, A.; Hannan, M.A. Intelligent maximum power point tracking for PV system using Hopfield neural network optimized fuzzy logic controller. Energy Build. 2012, 51, 29–38. [Google Scholar] [CrossRef]
- Shi, J.Y.; Ling, L.T.; Xue, F.; Qin, Z.J.; Liu, W.A.; Yang, T. Application of territorial particle swarm algorithm for photovoltaic maximum power tracking. J. Sol. Energy 2019, 40, 2554–2560. [Google Scholar]
- Nie, X.H.; Wang, W. Chaotic improved cat swarm algorithm and its application in photovoltaic MPPT. Chin. J. Electr. Eng. 2016, 36, 6103–6110. [Google Scholar]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A grey wolf-assisted perturb & observe MPPT algorithm for a PV system. IEEE Trans. Energy Convers. 2016, 32, 340–347. [Google Scholar]
- Mathi, D.K.; Ramulu, C. A hybrid global maximum power point tracking method based on butterfly particle swarm optimization and perturb and observe algorithms for a photovoltaic system under partially shaded conditions. Int. Trans. Electr. Energy Syst. 2020, 30, e12543. [Google Scholar] [CrossRef]
- Lasheen, M.; Abdel-Salam, M. Maximum power point tracking using Hill Climbing and ANFIS techniques for PV applications: A review and a novel hybrid approach. Energy Convers. Manag. 2018, 171, 1002–1019. [Google Scholar] [CrossRef]
- Bhukya, L.; Nandiraju, S. A novel photovoltaic maximum power point tracking technique based on grasshopper optimized fuzzy logic approach. Int. J. Hydrogen Energy 2020, 45, 9416–9427. [Google Scholar] [CrossRef]
- Huang, Y.P.; Huang, M.Y.; Ye, C.E. A fusion firefly algorithm with simplified propagation for photovoltaic MPPT under partial shading conditions. IEEE Trans. Sustain. Energy 2020, 11, 2641–2652. [Google Scholar] [CrossRef]
- Hassan, A.; Bass, O.; Masoum, M.A.S. An improved genetic algorithm based fractional open circuit voltage MPPT for solar PV systems. Energy Rep. 2023, 9, 1535–1548. [Google Scholar] [CrossRef]
- Li, J.Y.; Zhang, W.B.; Zhao, X.Z.; Liu, B.; Zheng, Y.F. Improved whale algorithm to optimise support vector regression for photovoltaic maximum power point tracking. J. Electrotechnol. 2021, 36, 1771–1781. [Google Scholar]
- Chen, B.; Wang, J.J.; Zhao, M.Y.; Zhao, F.Z. Research on MPPT control of photovoltaic power generation system based on improved whale optimisation algorithm. J. Power Syst. Autom. 2023, 35, 19–26. [Google Scholar]
- Tao, H.; Ghahremani, M.; Ahmed, F.W.; Jing, W.; Nazir, M.S.; Ohshima, K. A novel MPPT controller in PV systems with hybrid whale optimization-PS algorithm based ANFIS under different conditions. Control Eng. Pract. 2021, 112, 104809. [Google Scholar] [CrossRef]
- Chen, Y.X.; Vepa, R.; Shaheed, M.H. Enhanced and speedy energy extraction from a scaled-up pressure retarded osmosis process with a whale optimization based maximum power point tracking. Energy 2018, 153, 618–627. [Google Scholar] [CrossRef]
- Sun, R.X.; Shang, Y.H.; Han, S. Research on MPPT of photovoltaic array based on improved whale algorithm. Inf. Technol. Netw. Secur. 2021, 40, 31–36. [Google Scholar]
- Ebrahim, M.A.; Osama, A.; Kotb, K.M.; Bendary, F. Whale inspired algorithm based MPPT controllers for grid-connected solar photovoltaic system. Energy Procedia 2019, 162, 77–86. [Google Scholar] [CrossRef]
- Mao, Q.H.; Yang, L.; Wang, Y.L. A grey wolf algorithm incorporating improved Tent chaos and simulated annealing. Pract. Underst. Math. 2021, 51, 147–161. [Google Scholar]
- Ma, X.N.; Li, X.H. Reproducible whale algorithm based on Tent chaotic mapping. Comput. Simul. 2022, 39, 363–368. [Google Scholar]
- You, H.Y. Research on MPPT Control Strategy Based on Composite Algorithm. Master’s Thesis, Shenyang Engineering College, Shenyang, China, 2023. [Google Scholar]
- Tang, G.Q. Research on Control Strategy of Hybrid Energy Storage System for Photovoltaic Microgrid. Master’s Thesis, Anhui University of Technology, Ma’anshan, China, 2019. [Google Scholar]
- Gong, L.; Hou, G.; Huang, C. A two-stage MPPT controller for PV system based on the improved artificial bee colony and simultaneous heat transfer search algorithm. ISA Trans. 2023, 132, 428–443. [Google Scholar] [CrossRef]
- Yi, L.; Xie, Y.L.; Zeng, F.Y.; Li, J.Q.; Huang, H.; Chen, J. Neural network-based MPPT control with improved disturbance observation method. J. Sol. Energy 2022, 43, 198–203. [Google Scholar]
- Zhang, J.; Li, L.G. Research on photovoltaic MPPT control based on improved disturbance observation method. Electromech. Inf. 2023, 11–14. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Kumar P, D.S.; Samanta, S.; Mishra, S. Steady output and fast tracking MPPT (SOFT-MPPT) for P&O and InC algorithms. IEEE Trans. Sustain. Energy 2021, 12, 293–302. [Google Scholar]
- Wang, L.Z.; Liu, G.Y. Tracking control of photovoltaic MPPT based on simplified ant colony algorithm. Power Technol. 2020, 44, 1152–1155. [Google Scholar]
- Wen, Q.; Shi, X.P.; Zhang, L.F.; Li, L. APSO-LSTM natural gas demand forecasting model based on improved Tent mapping. Oil Gas Storage Transp. 2023, 42, 702–712. [Google Scholar]
- Zhang, Z.M.; Wang, W.B.; Peng, H.Y.; Zhou, Z.X. Photovoltaic maximum power point tracking based on improved firefly algorithm. J. Beihua Univ. (Nat. Sci. Ed.) 2021, 22, 405–409. [Google Scholar]
- Shirkhani, M.; Tavoosi, J.; Danyali, S.; Sarvenoee, A.K.; Abdali, A.; Mohammadzadeh, A.; Zhang, C. A review on microgrid decentralized energy/voltage control structures and methods. Energy Rep. 2023, 10, 368–380. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specific Value |
|---|---|
| Temperature under STC conditions: Tref | 25 °C |
| Irradiance under STC conditions: Sref | 1000 W/m2 |
| Correction factor a | 0.0025/°C |
| Correction factor b | 0.5 |
| Open-circuit voltage: Uoc | 36.3 V |
| Short-circuit current: Isc | 7.84 A |
| The voltage of MPP: Um | 29 V |
| The current of MPP: Im | 7.35 A |
| Condition | #1 | #2 | #3 | #4 | #5 | #6 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S | T | S | T | S | T | S | T | S | T | S | T | |
| Condition 2 | 800 | 25 | 800 | 25 | 800 | 25 | 800 | 25 | 800 | 25 | 800 | 25 |
| Condition 3 | 1000 | 25 | 1000 | 25 | 800 | 25 | 800 | 25 | 600 | 25 | 400 | 25 |
| Condition 4 | 1000 | 25 | 800 | 25 | 600 | 25 | 400 | 25 | 200 | 25 | 200 | 25 |
| Condition | Statistics | Units | PSO | WOA | WOA-P&O | ICWOA-P&O |
|---|---|---|---|---|---|---|
| Uniform irradiance | Theoretical value | W | 1027 | 1027 | 1027 | 1027 |
| Tracking time | s | 0.12 | 0.12 | 0.12 | 0.09 | |
| Tracking value | W | 1027 | 1027 | 1027 | 1027 | |
| Tracking accuracy | % | 100 | 100 | 100 | 100 | |
| RE | % | 0 | 0 | 0 | 0 | |
| IAE | J | 0 | 0 | 0 | 0 | |
| Oscillation state | / | big | big | big | small |
| Condition | Statistics | Units | PSO | WOA | WOA-P&O | ICWOA-P&O |
|---|---|---|---|---|---|---|
| Static local shading (Condition 3) | Theoretical value | W | 719.1 | 719.1 | 719.1 | 719.1 |
| Tracking time | s | 0.12 | 0.12 | 0.11 | 0.08 | |
| Tracking value | W | 709.6 | 711.4 | 719.1 | 719.1 | |
| Tracking accuracy | % | 98.69 | 98.93 | 100 | 100 | |
| RE | % | 1.32 | 1.07 | 0 | 0 | |
| IAE | J | 5.7 | 4.62 | 0 | 0 | |
| Oscillation state | / | big | big | small | small |
| Condition | Statistics | Units | PSO | WOA | WOA-P&O | ICWOA-P&O |
|---|---|---|---|---|---|---|
| Sudden changes in irradiance | Theoretical value | W | 837.7/1393 /580.6 | 837.7/1393 /580.6 | 837.7/1393 /580.6 | 837.7/1393 /580.6 |
| Tracking time | s | 0.12/0.12/0.12 | 0.12/0.12/0.12 | 0.11/0.11/0.11 | 0.07/0.1/0.09 | |
| Tracking value | W | 837.7/1392.5 /579.8 | 837.7/1392.6 /580.4 | 837.7/1392.5 /578.6 | 837.7/1392.6 /580.6 | |
| Tracking accuracy | % | 100/99.96 /99.86 | 100/99.97 /99.97 | 100/99.96 /99.66 | 100/99.97 /100 | |
| RE | % | 0/0.04/0.14 | 0/0.03/0.03 | 0/0.04/0.34 | 0/0.03/0 | |
| IAE | J | 0/0.3/0.48 | 0/0.24/0.12 | 0/0.3/1.2 | 0/0.24/0 | |
| Oscillation state | / | Big | big | big | small |
| Condition | Statistics | Units | PSO | WOA | WOA-P&O | ICWOA-P&O |
|---|---|---|---|---|---|---|
| Sudden changes in both temperature and irradiance | Theoretical value | W | 397.1/364.6 | 397.1/364.6 | 397.1/364.6 | 397.1/364.6 |
| Tracking time | s | 0.12/0.12 | 0.12/0.12 | 0.12/0.11 | 0.08/0.09 | |
| Tracking value | W | 394.5/363.2 | 396.6/363.2 | 397.1/364.6 | 397.1/364.6 | |
| Tracking accuracy | % | 99.35/99.62 | 99.87/99.62 | 100/100 | 100/100 | |
| RE | % | 0.65/0.38 | 0.13/0.38 | 0/0 | 0/0 | |
| IAE | J | 1.56/0.84 | 0.3/0.84 | 0/0 | 0/0 | |
| Oscillation state | / | big | big | big | small |
| Condition | Voltage | Power |
|---|---|---|
| Condition 1 | 173.3 V | 1273 W |
| Condition 3 | 155.8 V | 719.1 W |
| Condition 4 | 90.17 V | 412.7 W |
| Condition | PSO | WOA | WOA-P&O | ICWOA-P&O | |
|---|---|---|---|---|---|
| Condition 1 | Tracking voltage value (V) | 173.9 | 174.1 | 173.3 | 173.3 |
| Tracking power value (W) | 1269 | 1272 | 1272 | 1273 | |
| Tracking time (s) | 0.27 | 0.27 | 0.23 | 0.17 | |
| IAE (J) | 5.6 | 1.4 | 1.4 | 0 | |
| RE (%) | 0.31 | 0.08 | 0.08 | 0 | |
| Condition 3 | Tracking voltage value (V) | 116.6 | 155.5 | 117.7 | 117.7 |
| Tracking power value (W) | 709.1 | 716.5 | 709.9 | 709.9 | |
| Tracking time (s) | 0.29 | 0.28 | 0.23 | 0.15 | |
| IAE (J) | 14 | 3.64 | 12.88 | 12.88 | |
| RE (%) | 1.39 | 0.36 | 1.28 | 1.28 | |
| Condition 4 | Tracking voltage value (V) | 91.57 | 125.7 | 90.23 | 90.16 |
| Tracking power value (W) | 409.9 | 386.2 | 412.7 | 412.7 | |
| Tracking time (s) | 0.3 | 0.29 | 0.25 | 0.10 | |
| IAE (J) | 3.92 | 37.1 | 0 | 0 | |
| RE (%) | 0.68 | 6.42 | 0 | 0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Liu, S.; Yu, H.; Wu, Z.; Tong, J.; Yuan, Q. Research on Hybrid Approach for Maximum Power Point Tracking of Photovoltaic Systems under Various Operating Conditions. Electronics 2024, 13, 3880. https://doi.org/10.3390/electronics13193880
Liu T, Liu S, Yu H, Wu Z, Tong J, Yuan Q. Research on Hybrid Approach for Maximum Power Point Tracking of Photovoltaic Systems under Various Operating Conditions. Electronics. 2024; 13(19):3880. https://doi.org/10.3390/electronics13193880
Chicago/Turabian StyleLiu, Tan, Sisi Liu, Hexu Yu, Zhiyi Wu, Jiaqi Tong, and Qingyun Yuan. 2024. "Research on Hybrid Approach for Maximum Power Point Tracking of Photovoltaic Systems under Various Operating Conditions" Electronics 13, no. 19: 3880. https://doi.org/10.3390/electronics13193880