
Robust Adaptive Sliding Mode Control Using Stochastic Gradient Descent for Robot Arm Manipulator Trajectory Tracking



Abstract
:1. Introduction
1.1. Contributions
1.2. Structure Overview
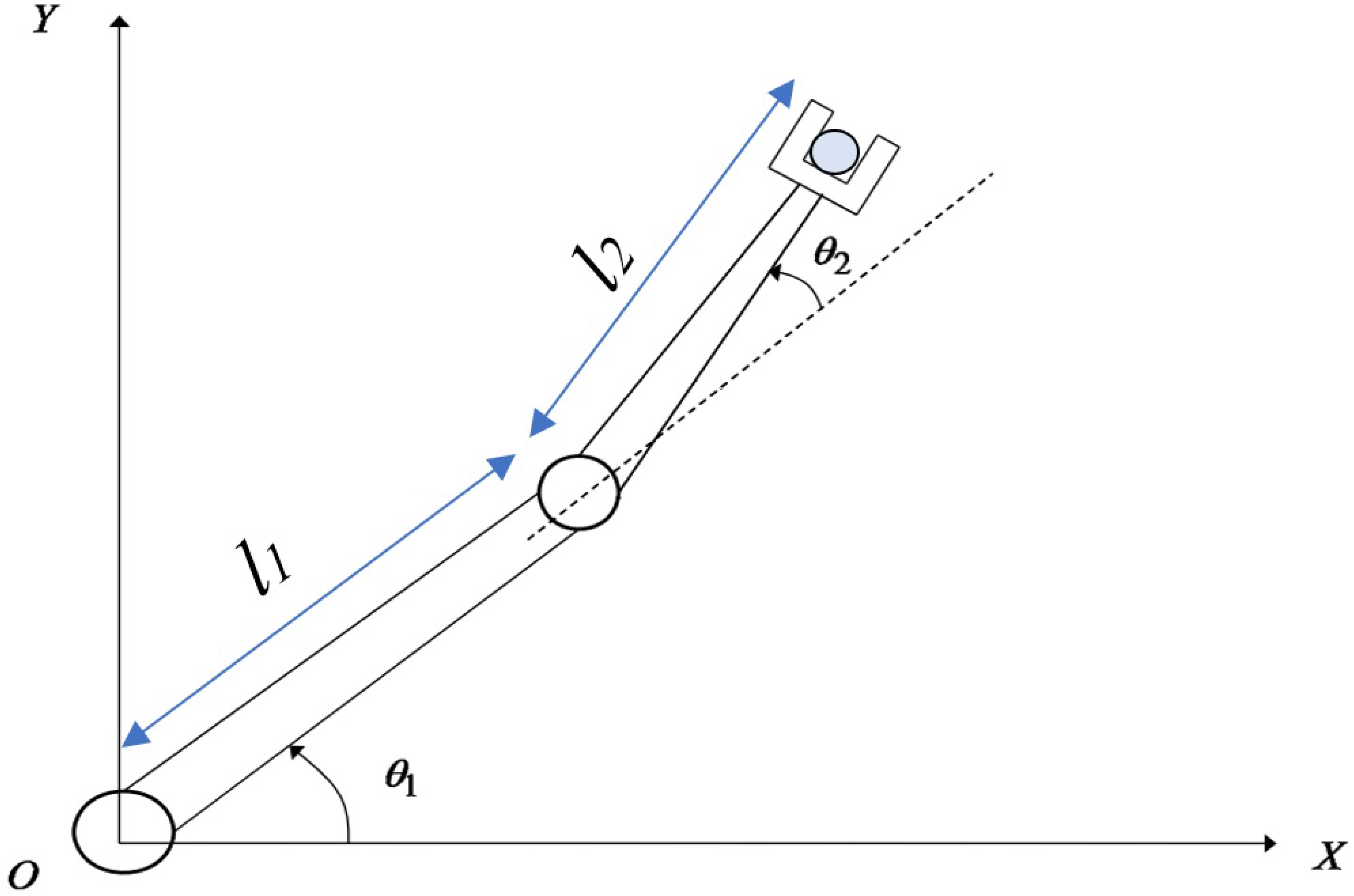
2. Dynamic Modeling of a 2-DoF Robot Arm Manipulator
3. Control Design
3.1. Sliding Mode Control
3.2. Super Twisting Control
- The matrix is Hurwitz, meaning all its eigenvalues have negative real parts.
- The constant gains and are positive, i.e., and .
- For every symmetric and positive definite matrix , the Algebraic Lyapunov Equation (ALE) has a unique symmetric and positive definite solution .
3.3. Adaptive Sliding Mode Using Stochastic Gradient Descent
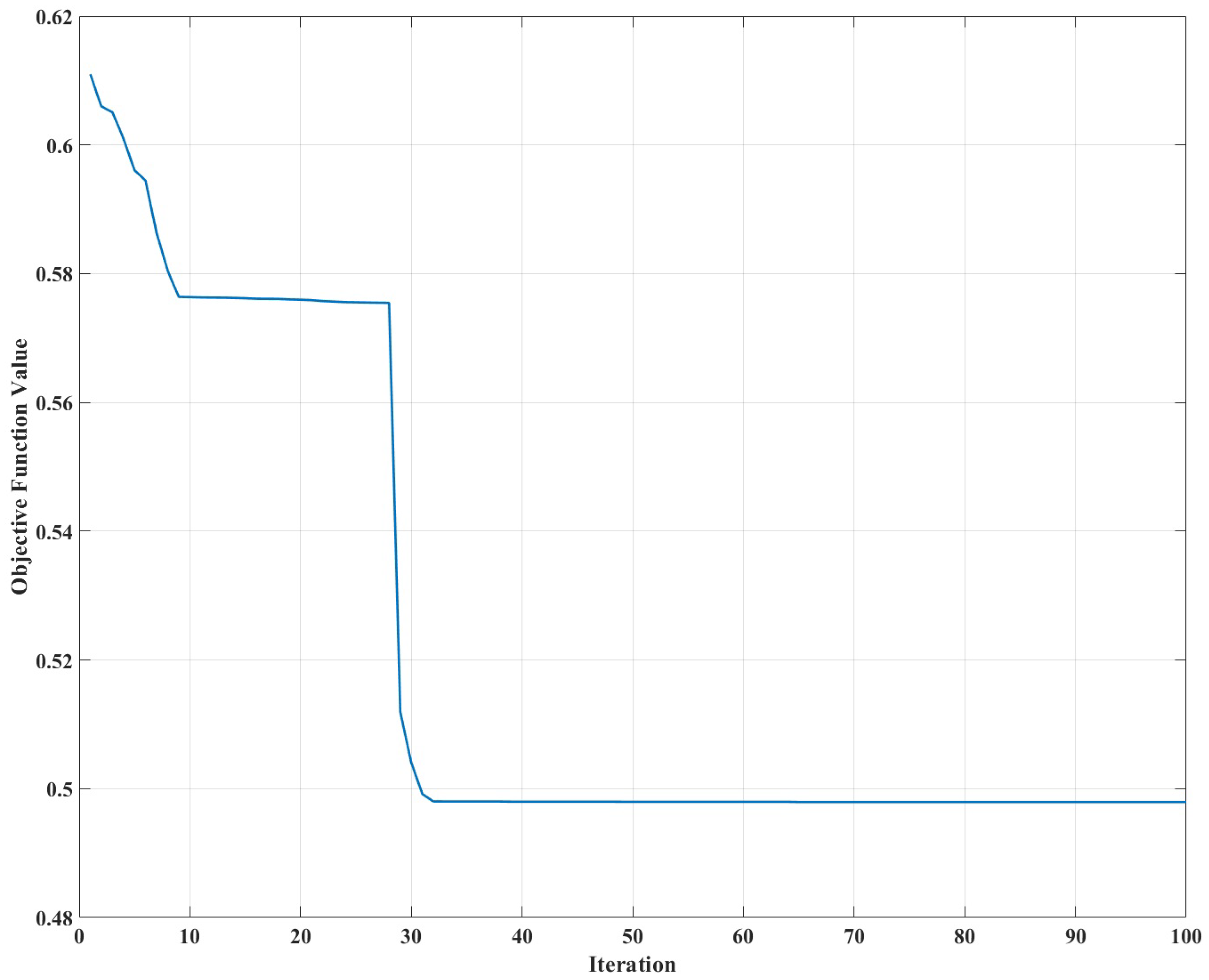
4. The Grey Wolf Optimizer
4.1. Encircling the Prey
- denotes the distance vector between the current position of the wolf and the prey.
- represents the position vector of the prey.
- indicates the position vector of the grey wolf.
- t refers to the current iteration.
- and are coefficient vectors computed as follows:
4.2. Hunting
4.3. Attacking the Prey
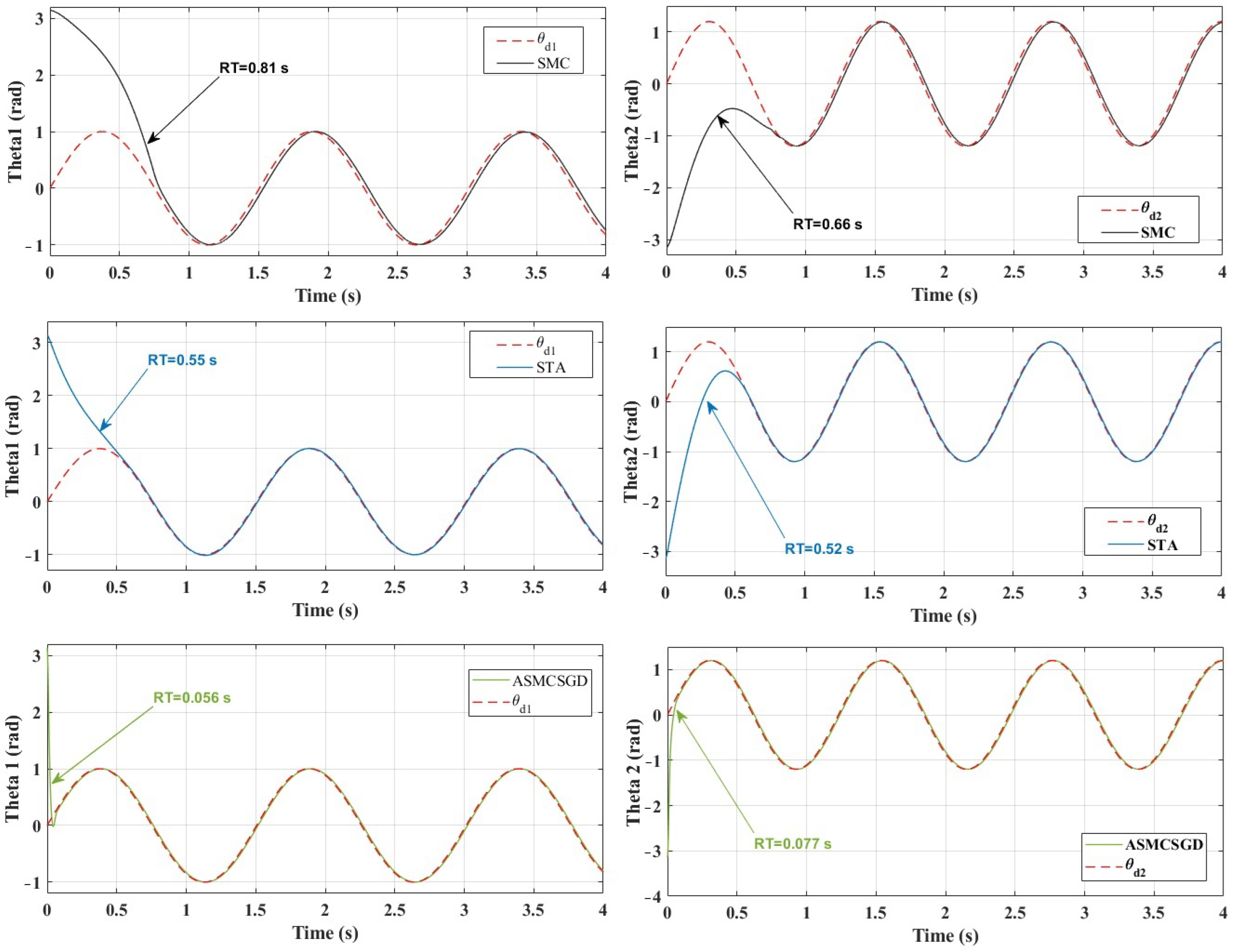
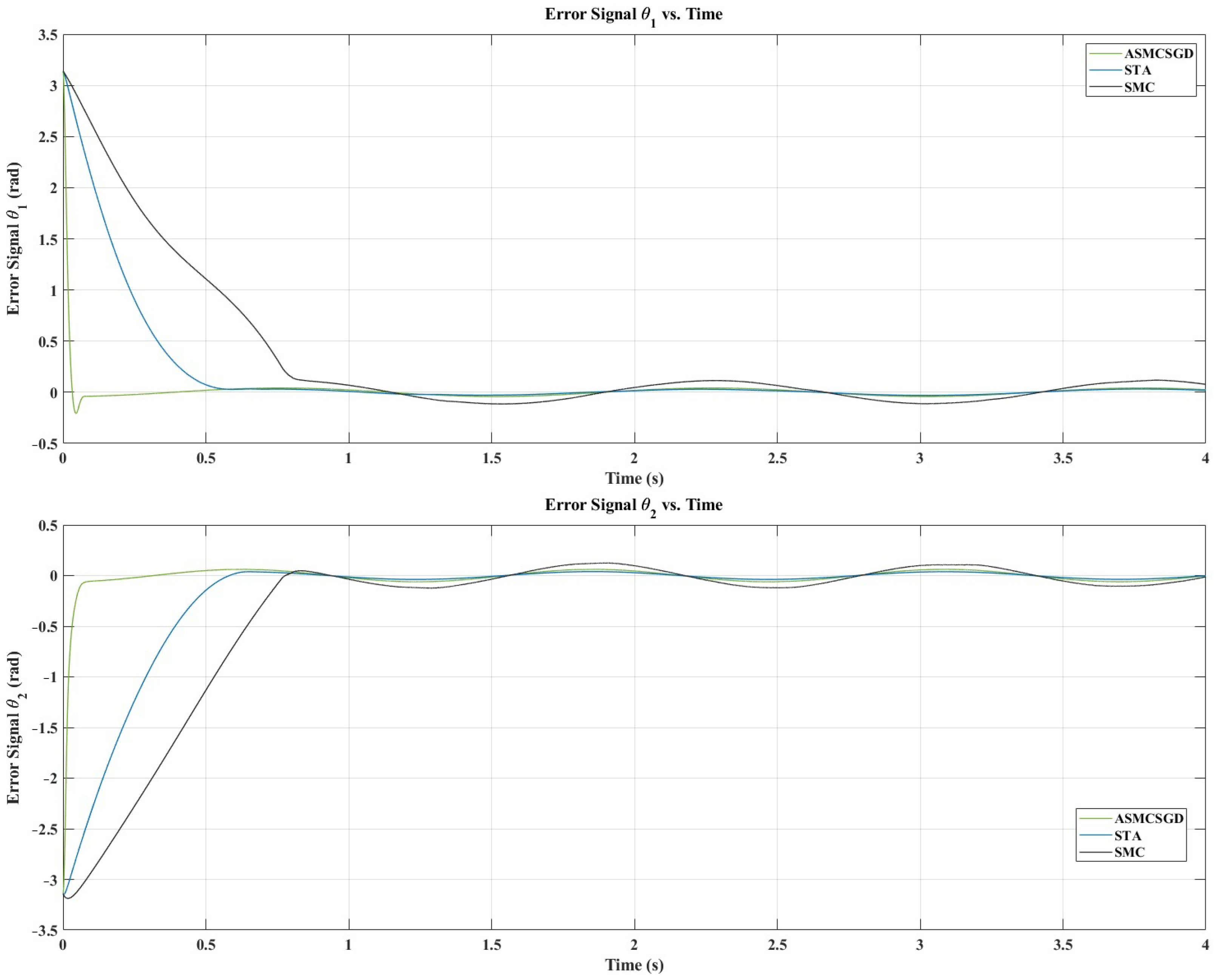
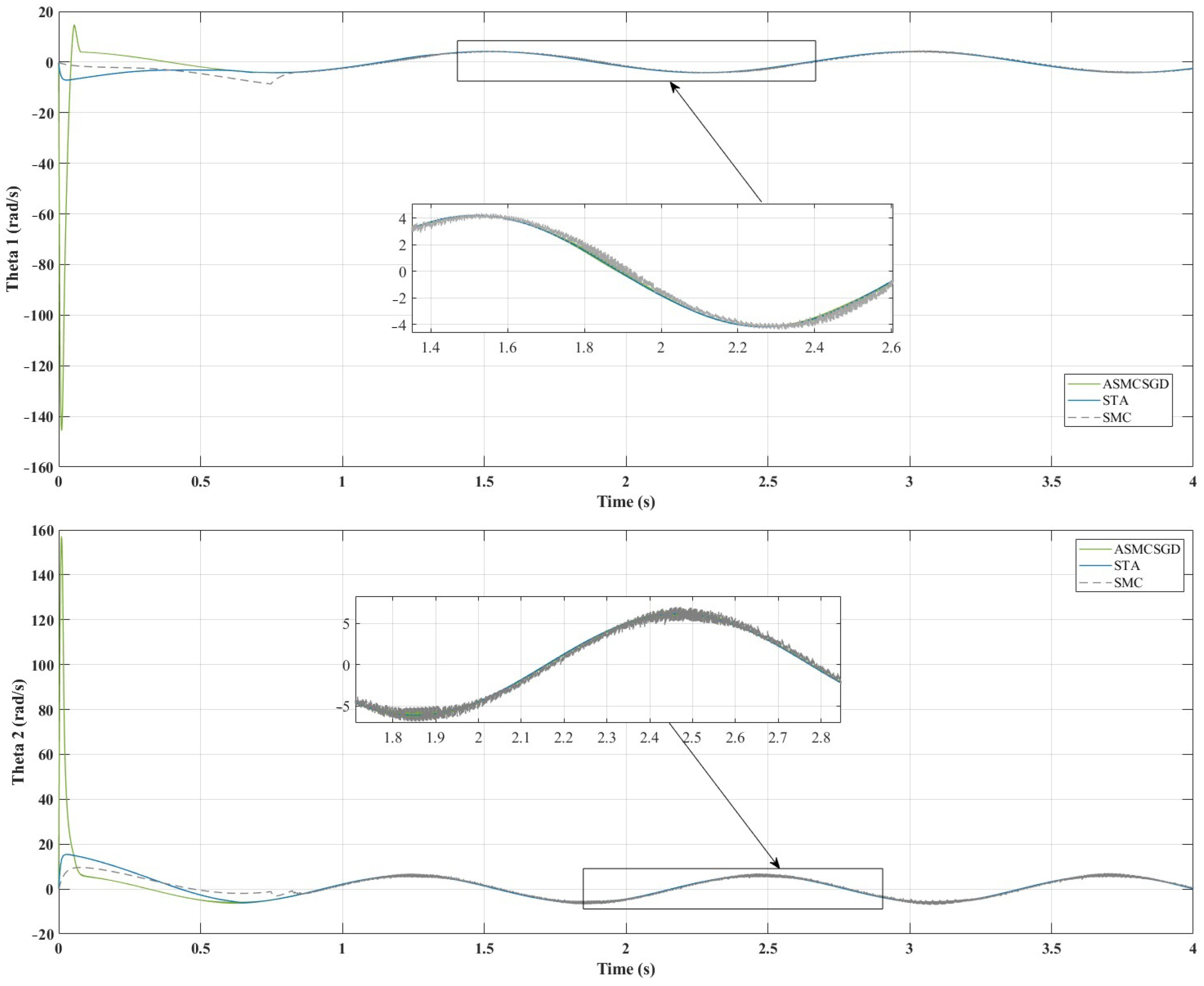
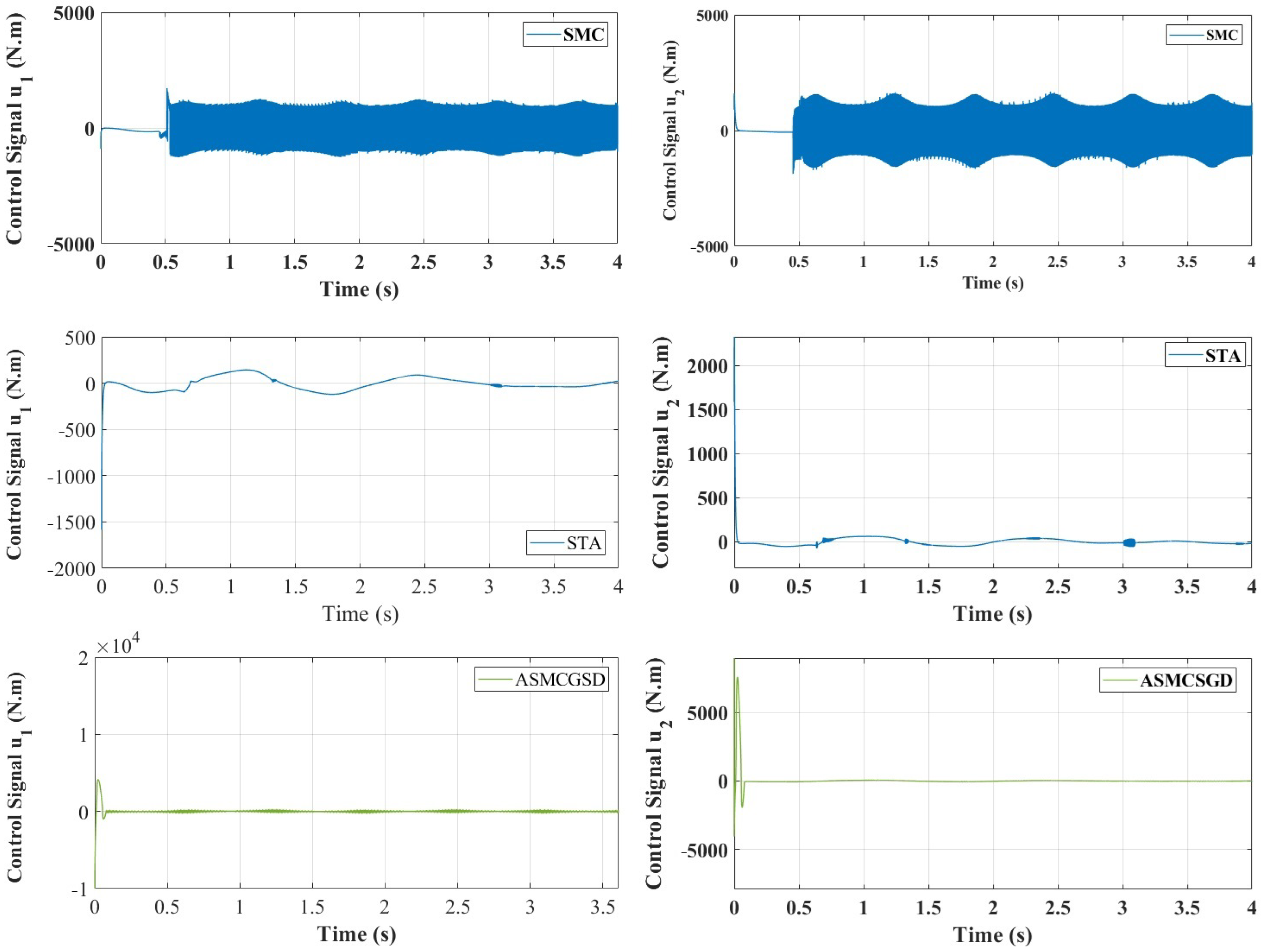
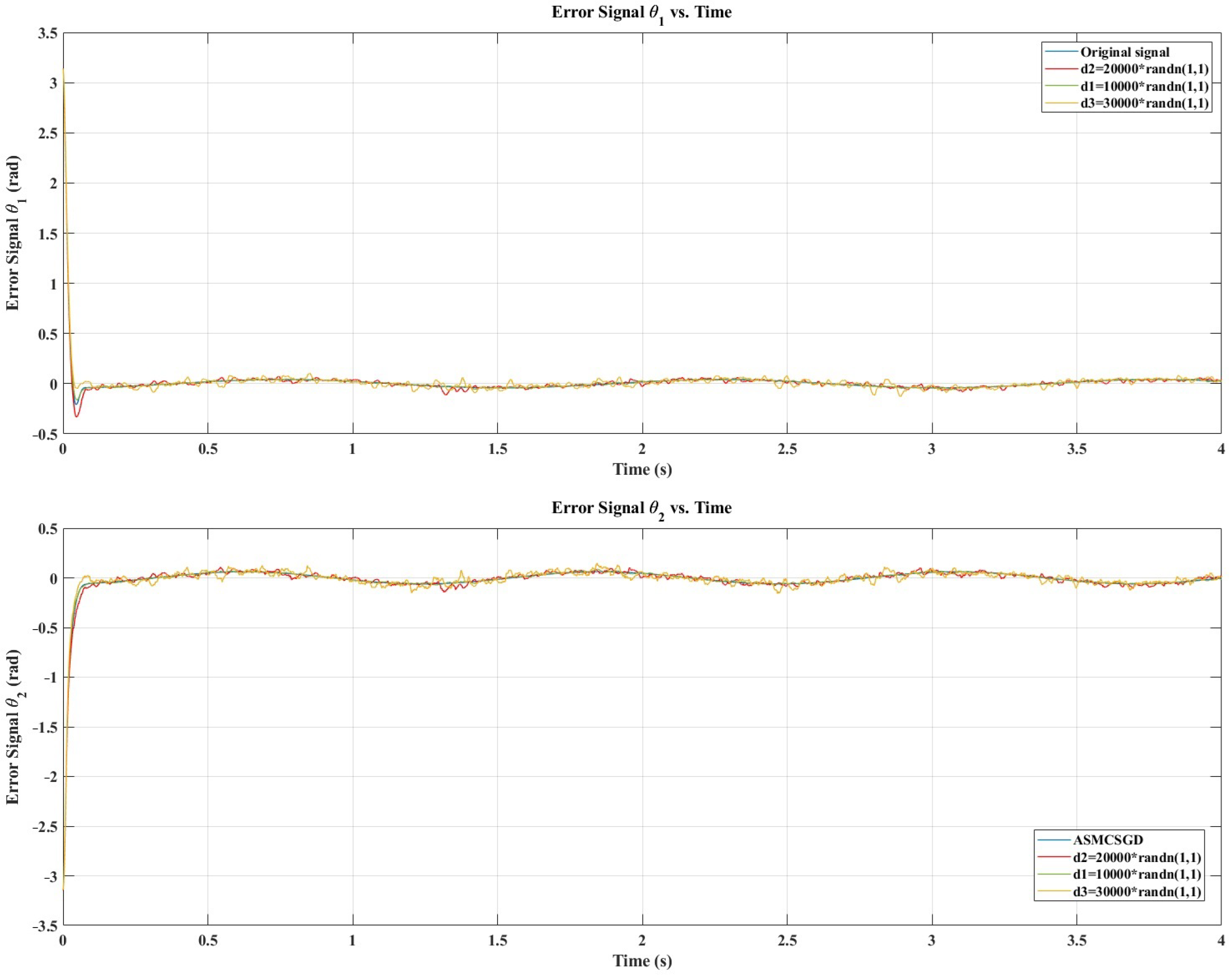
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2-DoF | 2-degree-of-freedom |
| ASMCSGD | Adaptive Sliding Mode Control With Stochastic Gradient Descent |
| STA | Super Twisting Algorithm |
| SMC | Sliding Mode Control |
| GWO | Grey Wolf Optimizer |
| RMSE | Root Mean Squared Error |
| PID | Proportional-Integral-Derivative |
| FLC | Fuzzy Logic Controller |
| NNs | Neural Networks |
| ANFIS | Adaptive Neuro-Fuzzy Inference System |
| MIMO | Multi-Input, Multi-Output |
| ASMC | Adaptive Sliding Mode Control |
| SO-SMC | Second-Order Sliding Mode Control |
| DSSMC | Dual Surface Sliding Mode Controller |
| EHSS | Electrohydraulic Servo Systems |
Appendix A
References
- Lamon, E.; Leonori, M.; Kim, W.; Ajoudani, A. Towards an intelligent collaborative robotic system for mixed case palletizing. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 2020–31 August 2020; pp. 9128–9134. [Google Scholar]
- Sathish Kumar, A.; Naveen, S.; Vijayakumar, R.; Suresh, V.; Asary, A.R.; Madhu, S.; Palani, K. An intelligent fuzzy-particle swarm optimization supervisory-based control of robot manipulator for industrial welding applications. Sci. Rep. 2023, 13, 8253. [Google Scholar] [CrossRef] [PubMed]
- Shanmugasundar, G.; Sapkota, G.; Čep, R.; Kalita, K. Application of MEREC in multi-criteria selection of optimal spray-painting robot. Processes 2022, 10, 1172. [Google Scholar] [CrossRef]
- Bottin, M.; Cocuzza, S.; Massaro, M. Variable stiffness mechanism for the reduction of cutting forces in robotic deburring. Appl. Sci. 2021, 11, 2883. [Google Scholar] [CrossRef]
- Blatnický, M.; Dižo, J.; Gerlici, J.; Sága, M.; Lack, T.; Kuba, E. Design of a robotic manipulator for handling products of automotive industry. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420906290. [Google Scholar] [CrossRef]
- Li, R.; Qiao, H. A survey of methods and strategies for high-precision robotic grasping and assembly tasks—Some new trend. IEEE/ASME Trans. Mechatron. 2019, 24, 2718–2732. [Google Scholar] [CrossRef]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot modeling and control. IEEE/ASME Trans. Mechatron. 2019, 24, 2718–2732. [Google Scholar]
- Ghosh, A.; Krishnan, T.R.; Tejaswy, P.; Mandal, A.; Pradhan, J.K.; Ranasingh, S. Design and implementation of a 2-DoF PID compensation for magnetic levitation systems. ISA Trans. 2014, 53, 1216–1222. [Google Scholar] [CrossRef]
- Bi, M. Control of robot arm motion using trapezoid fuzzy two-degree-of-freedom PID algorithm. Symmetry 2020, 12, 665. [Google Scholar] [CrossRef]
- Zhao, X.; Lin, Z.; Fu, B.; He, L.; Fang, N. Research on automatic generation control with wind power participation based on predictive optimal 2-degree-of-freedom PID strategy for multi-area interconnected power system. Energies 2018, 11, 3325. [Google Scholar] [CrossRef]
- Efe, M.Ö. Fractional fuzzy adaptive sliding-mode control of a 2-DoF direct-drive robot arm. IEEE Trans. Syst. Man Cybern. Part Cybern. 2018, 38, 1561–1570. [Google Scholar] [CrossRef]
- Tuan, H.M.; Sanfilippo, F.; Hao, N.V. A novel adaptive sliding mode controller for a 2-DoF elastic robotic arm. Robotics 2022, 11, 47. [Google Scholar] [CrossRef]
- Patel, K.; Mehta, A. Discrete-time event-triggered higher order sliding mode control for consensus of 2-DoF robotic arms. Eur. J. Control 2020, 56, 231–241. [Google Scholar] [CrossRef]
- El-Khatib, M.F.; Maged, S.A. Low level position control for 4-DoF arm robot using fuzzy logic controller and 2-DoF PID controller. In Proceedings of the 2021 International Mobile, Intelligent, and Ubiquitous Computing Conference (MIUCC), Cairo, Egypt, 26–27 May 2021; pp. 258–262. [Google Scholar]
- Bikova, M.; Latkoska, V.O.; Hristov, B.; Stavrov, D. Path planning using fuzzy logic control of a 2-DoF robotic arm. In Proceedings of the 2022 IEEE 17th International Conference on Control & Automation (ICCA), Naples, Italy, 27–30 June 2022; pp. 998–1003. [Google Scholar]
- Mohammed, A.A.; El-Nagar, A.M.; Elsheikh, E.A.; El-Bardini, M. Embedded adaptive 2-DoF PID controller for robot manipulator using a supervisory fuzzy logic system. Menoufia J. Electron. Eng. Res. 2022, 31, 55–62. [Google Scholar] [CrossRef]
- Al-Darraji, I.; Piromalis, D.; Kakei, A.A.; Khan, F.Q.; Stojmenovic, M.; Tsaramirsis, G.; Papageorgas, P.G. Adaptive robust controller design-based RBF neural network for aerial robot arm model. Electronics 2021, 10, 831. [Google Scholar] [CrossRef]
- Rahmani, M.; Komijani, H.; Rahman, M.H. New sliding mode control of 2-DoF robot manipulator based on extended grey wolf optimizer. Int. J. Control. Autom. Syst. 2020, 18, 1572–1580. [Google Scholar] [CrossRef]
- Ren, B.; Wang, Y.; Chen, J. Trajectory-tracking-based adaptive neural network sliding mode controller for robot manipulators. J. Comput. Inf. Sci. Eng. 2020, 20, 031009. [Google Scholar] [CrossRef]
- Thi, H.L.; Dang, V.T.; Nguyen, N.T.; Le, D.T.; Nguyen, T.L. A neural network-based fast terminal sliding mode controller for dual-arm robots. In International Conference on Engineering Research and Applications; Springer: Cham, Switzerland, 2022; pp. 42–52. [Google Scholar]
- Cai, B.; Zhang, Y. Different-level redundancy-resolution and its equivalent relationship analysis for robot manipulators using gradient-descent and Zhang’s neural-dynamic methods. IEEE Trans. Ind. Electron. 2011, 59, 3146–3155. [Google Scholar] [CrossRef]
- Youns, M.D.; Attya, S.M.; Abdulla, A.I. Position control of robot arm using genetic algorithm based PID controller. Al-Rafidain Eng. Mosul Iraq 2013, 21, 19–30. [Google Scholar]
- Bingol, M.C.; Akpolat, Z.H.; Koca, G.O. Robust control of a robot arm using an optimized PID controller. In Mechatronics 2017: Recent Technological and Scientific Advances; Springer: Berlin/Heidelberg, Germany, 2018; pp. 484–492. [Google Scholar]
- Zhao, J.; Han, L.; Wang, L.; Yu, Z. The fuzzy PID control optimized by genetic algorithm for trajectory tracking of robot arm. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016; pp. 556–559. [Google Scholar]
- Pan, Y.; Li, X.; Wang, H.; Yu, H. Continuous sliding mode control of compliant robot arms: A singularly perturbed approach. Mechatronics 2018, 52, 127–134. [Google Scholar] [CrossRef]
- Zakia, U.; Moallem, M.; Menon, C. PID-SMC controller for a 2-DoF planar robot. In Proceedings of the 2019 International Conference on Electrical, Computer and Communication Engineering (ECCE), Cox’s Bazar, Bangladesh, 7–9 February 2019; pp. 1–5. [Google Scholar]
- Eltayeb, A.; Rahmat, M.F.; Eltoum, M.M.; MH, S.I.; Basri, M.A.M. Adaptive sliding mode control design for the 2-DoF robot arm manipulators. In Proceedings of the 2019 International Conference on Computer, Control, Electrical, and Electronics Engineering (ICCCEEE), Khartoum, Sudan, 21–23 September 2019; pp. 1–5. [Google Scholar]
- Zhang, J.; Yu, L.; Tang, J.; Ding, L. Dual Surface Sliding Mode Controller of Torque Tracking for 2-DoF Robotic Arm Driven by Electrohydraulic Servo System. Eng. Lett. 2018, 26. [Google Scholar]
- Jouila, A.; Nouri, K. An adaptive robust nonsingular fast terminal sliding mode controller based on wavelet neural network for a 2-DoF robotic arm. J. Frankl. Inst. 2020, 357, 13259–13282. [Google Scholar] [CrossRef]
- Mohan, V.; Chhabra, H.; Rani, A.; Singh, V. An expert 2DOF fractional order fuzzy PID controller for nonlinear systems. Neural Comput. Appl. 2019, 31, 4253–4270. [Google Scholar] [CrossRef]
- Howard, I.S.; Ingram, J.N.; Wolpert, D.M. A modular planar robotic manipulandum with end-point torque control. J. Neurosci. Methods 2009, 181, 199–211. [Google Scholar] [CrossRef] [PubMed]
- Sachan, S.; Swarnkar, P. Intelligent fractional order sliding mode based control for surgical robot manipulator. Electronics 2023, 12, 729. [Google Scholar] [CrossRef]
- Song, Z.; Bao, D.; Wang, W.; Zhao, W. Adaptive Dynamic Boundary Sliding Mode Control for Robotic Manipulators under Varying Disturbances. Electronics 2024, 13, 900. [Google Scholar] [CrossRef]
- Sinha, S.; Nethi, A.; Jetta, M. Multiplicative Gaussian Noise Removal using Partial Differential Equations and Activation Functions: A Robust and Stable Approach. In Proceedings of the 7th International Conference on Algorithms, Computing and Systems, Larissa, Greece, 19–21 October 2023; pp. 161–170. [Google Scholar]
- Guo, K.; Shi, P.; Wang, P.; He, C.; Zhang, H. Non-singular terminal sliding mode controller with nonlinear disturbance observer for robotic manipulator. Electronics 2023, 12, 849. [Google Scholar] [CrossRef]
- Song, Y.; Liu, Z.; Ouyang, H.; Wang, H.; Lu, X. Sliding Mode Control with PD Sliding Surface for High-Speed Railway Pantograph-Catenary Contact Force under Strong Stochastic Wind Field. Pshock Vib. 2017, 2017, 4895321. [Google Scholar] [CrossRef]
- Dang, S.T.; Dinh, X.M.; Kim, T.D.; Xuan, H.L.; Ha, M.H. Adaptive backstepping hierarchical sliding mode control for 3-wheeled mobile robots based on RBF neural networks. Electronics 2023, 12, 2345. [Google Scholar] [CrossRef]
- Zhao, M.; Qian, H.; Zhang, Y. Predefined-Time Adaptive Fast Terminal Sliding Mode Control of Aerial Manipulation Based on a Nonlinear Disturbance Observer. Electronics 2024, 13, 2746. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Sehab, R.; Akrad, A.; Saadi, Y. Super-twisting sliding mode control to improve performances and robustness of a switched reluctance machine for an electric vehicle drivetrain application. Energies 2023, 16, 3212. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Rahmani, M. Control of a caterpillar robot manipulator using hybrid control. Microsyst. Technol. 2019, 25, 2841–2854. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Bencherif, A.; Barambones, O. A novel robust adaptive sliding mode control using stochastic gradient descent for PEMFC power system. Int. J. Hydrogen Energy 2023, 48, 17277–17292. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A. A novel adaptive PID controller design for a PEM fuel cell using stochastic gradient descent with momentum enhanced by whale optimizer. Electronics 2022, 11, 2610. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Derbeli, M.; Napole, C.; Bencherif, A. Fractional order PID design for a proton exchange membrane fuel cell system using an extended grey wolf optimizer. Processes 2022, 10, 450. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A.; Rahmani, A. A New MPPT-Based Extended Grey Wolf Optimizer for Stand-Alone PV System: A Performance Evaluation versus Four Smart MPPT Techniques in Diverse Scenarios. Inventions 2023, 8, 142. [Google Scholar] [CrossRef]
- Rao, S.S. Engineering Optimization: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Silaa, M.Y.; Bencherif, A.; Barambones, O. Indirect Adaptive Control Using Neural Network and Discrete Extended Kalman Filter for Wheeled Mobile Robot. Actuators 2024, 13, 51. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | |||||||
|---|---|---|---|---|---|---|---|
| ASMCSGD | Min | 0 | 0 | - | - | 1 | 0 |
| Max | 8000 | 200 | - | - | 2 | 1 | |
| STA | Min | 0 | 0 | 0 | 0 | - | - |
| Max | 8000 | 60 | 200 | 200 | - | - | |
| SMC | Min | 0 | 0 | - | - | - | - |
| Max | 8000 | 60 | - | - | - | - |
| Controller | ||||||
|---|---|---|---|---|---|---|
| ASMCSGD | 8000 | 100 | - | - | - | |
| STA | 8000 | - | 10 | - | ||
| SMC | 2078 | 200 | - | - | - |
| Controller | RMSE for | RMSE for |
|---|---|---|
| ASMCSGD | ||
| STA | ||
| SMC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silaa, M.Y.; Barambones, O.; Bencherif, A. Robust Adaptive Sliding Mode Control Using Stochastic Gradient Descent for Robot Arm Manipulator Trajectory Tracking. Electronics 2024, 13, 3903. https://doi.org/10.3390/electronics13193903
Silaa MY, Barambones O, Bencherif A. Robust Adaptive Sliding Mode Control Using Stochastic Gradient Descent for Robot Arm Manipulator Trajectory Tracking. Electronics. 2024; 13(19):3903. https://doi.org/10.3390/electronics13193903
Chicago/Turabian StyleSilaa, Mohammed Yousri, Oscar Barambones, and Aissa Bencherif. 2024. "Robust Adaptive Sliding Mode Control Using Stochastic Gradient Descent for Robot Arm Manipulator Trajectory Tracking" Electronics 13, no. 19: 3903. https://doi.org/10.3390/electronics13193903