
Photovoltaic Maximum Power Point Tracking Technology Based on Improved Perturbation Observation Method and Backstepping Algorithm

Abstract
:1. Introduction
- (1)
- The algorithm introduces the concept of a boundary point, initially moving the operating point to the intersection of the I-U curve and the load line. Then, it can continue tracking with the P&O algorithm, which gives the algorithm the ability to escape local extrema, compared to traditional MPPT methods.
- (2)
- The backstepping algorithm is introduced to overcome the drawbacks of the P&O method where the step is fixed and the power fluctuates significantly after reaching the maximum power point.
- (3)
- The algorithm uses a large-step P&O method for initial tracking, which has a speed advantage.
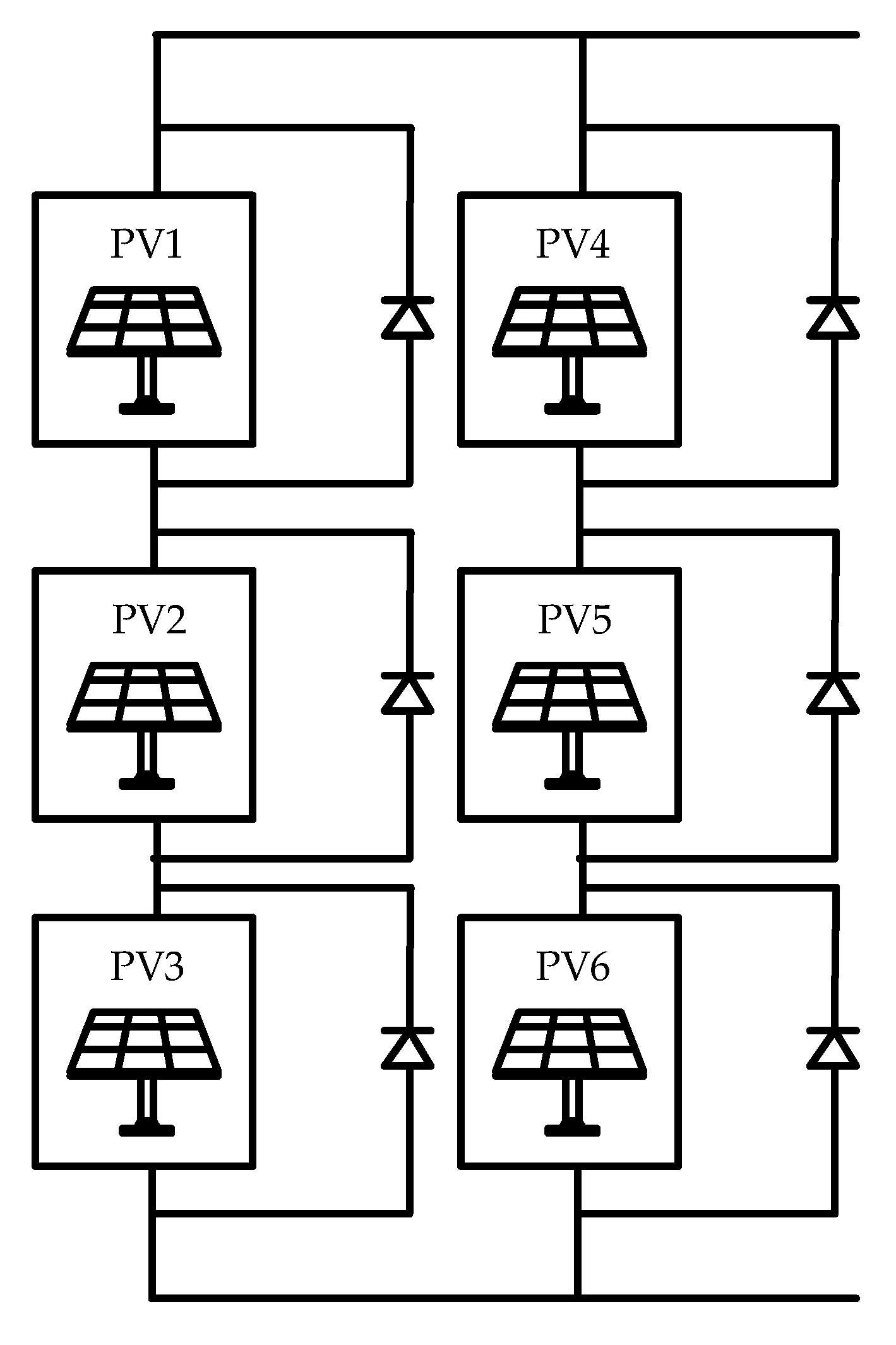
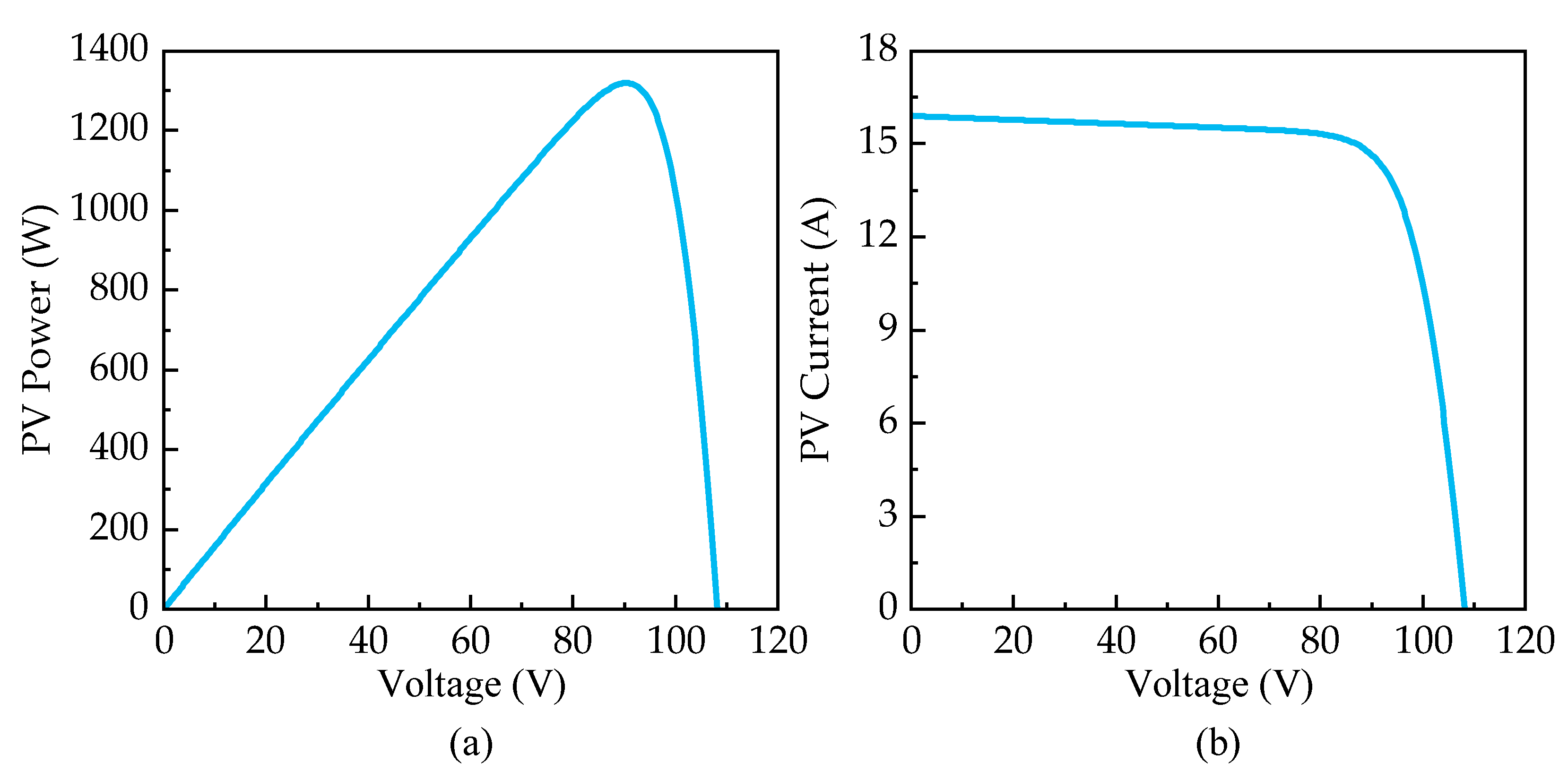
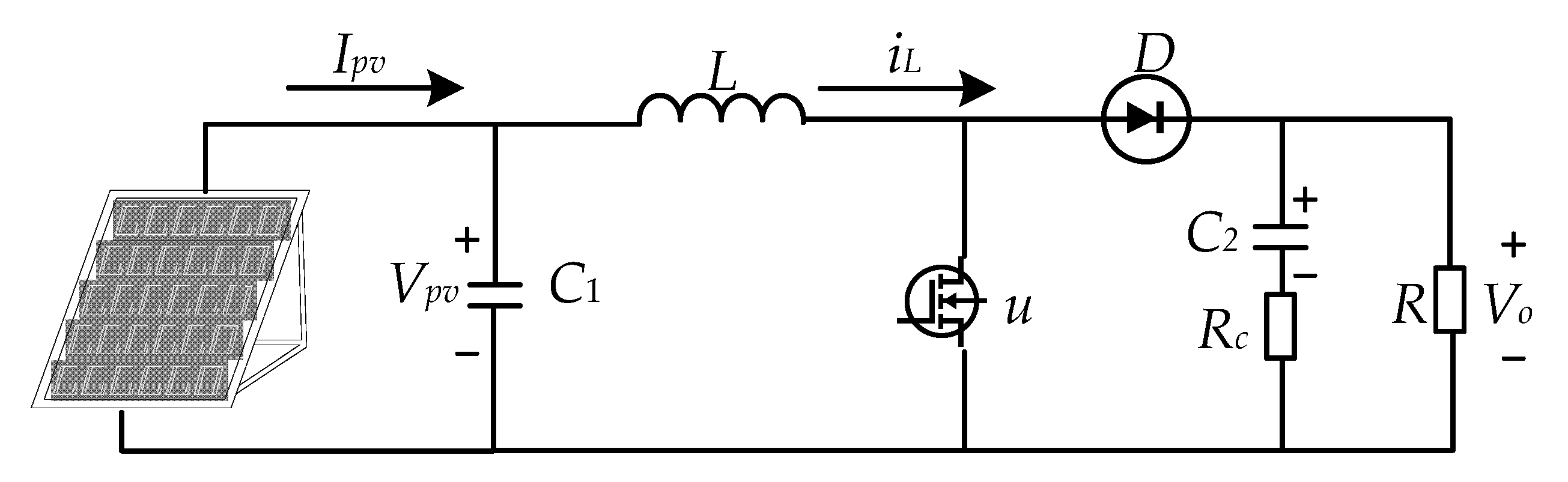
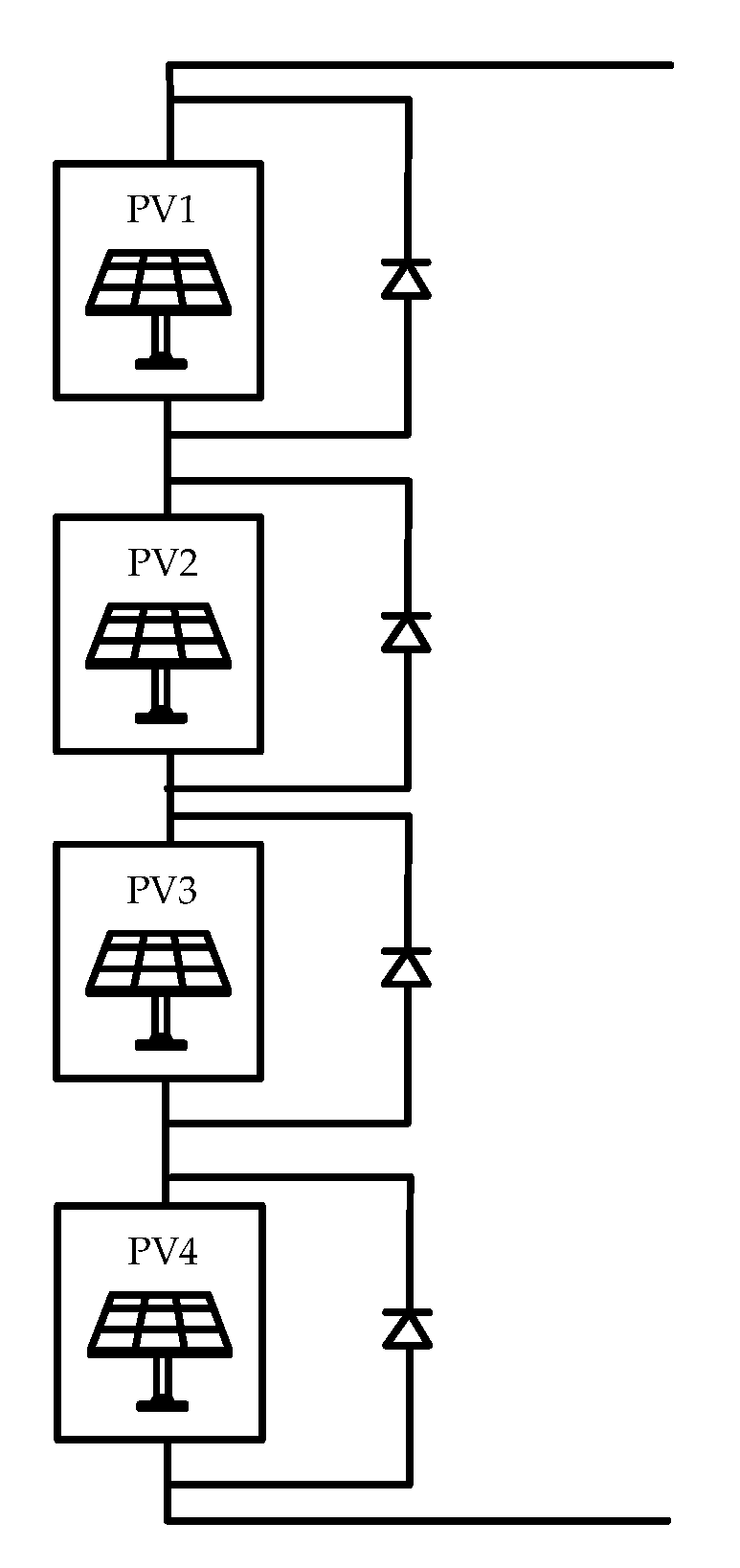
2. Modeling of Photovoltaic Power Generation Systems and Analysis of Photovoltaic Array Output Characteristics
3. Design of IP&O-Backstepping
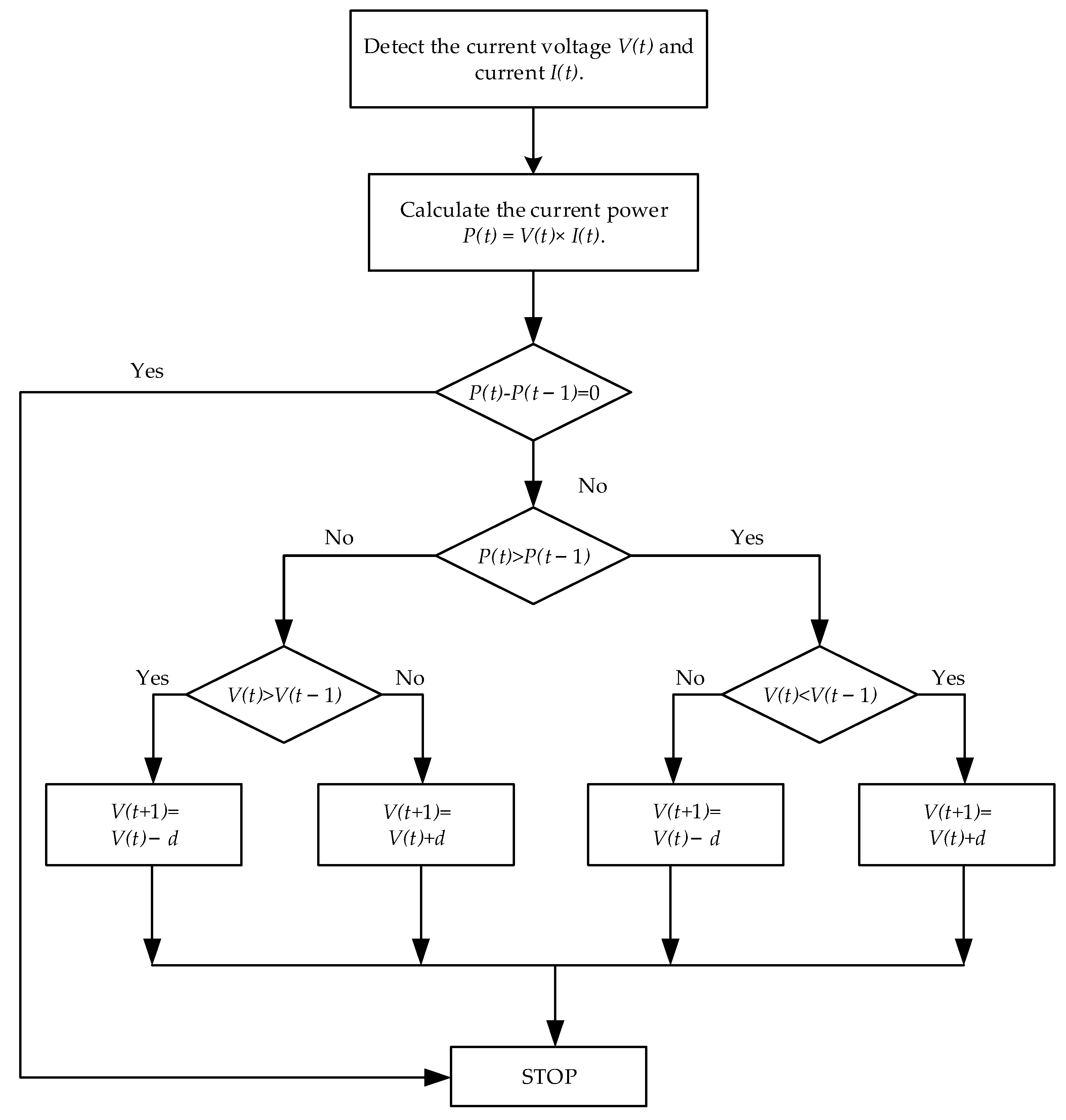
3.1. Introduction to Perturbation Observation Method
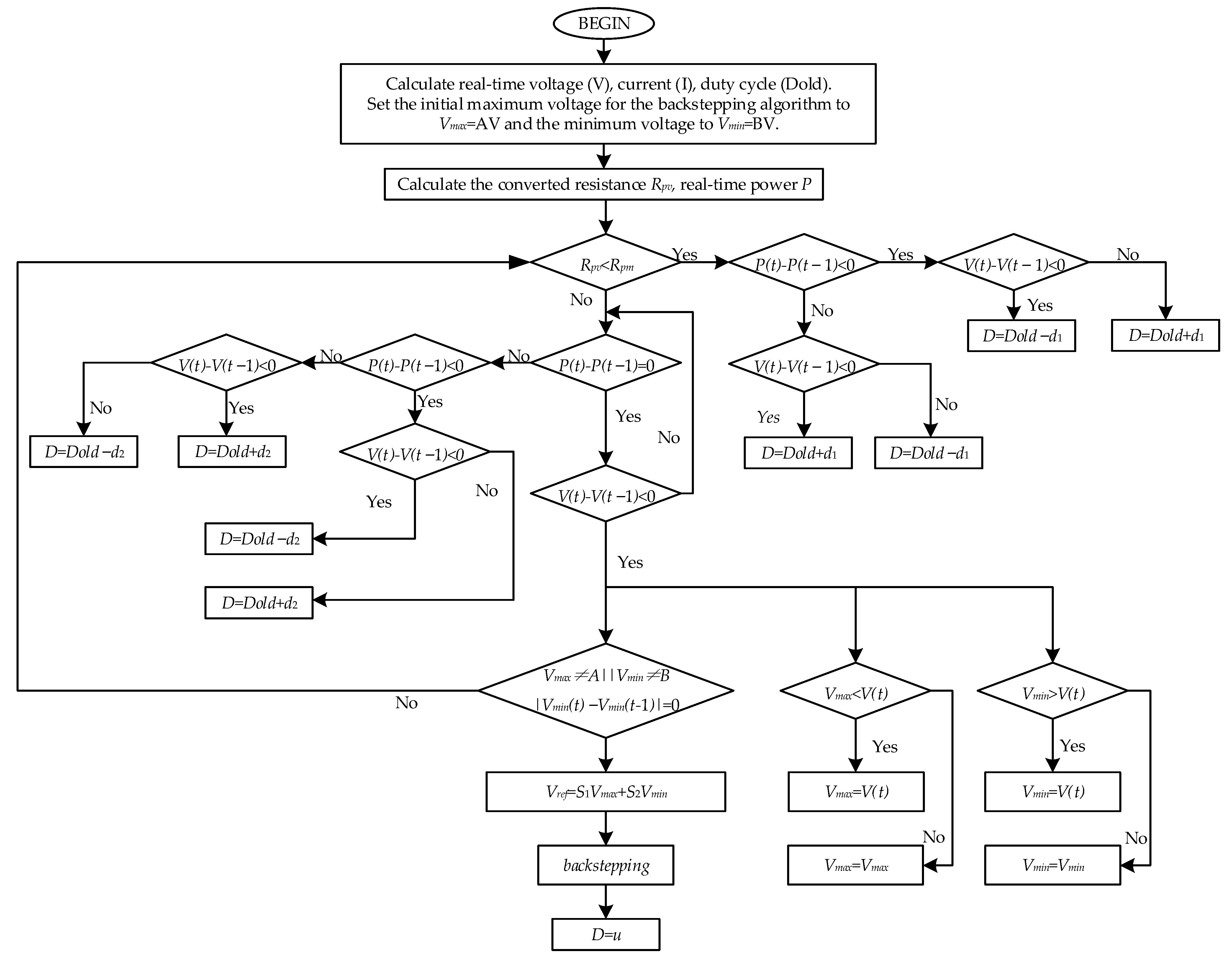
3.2. The Design Process of IP&O-Backstepping
4. Simulation Setup and Results
4.1. Simulation Setting
4.2. Simulation Result
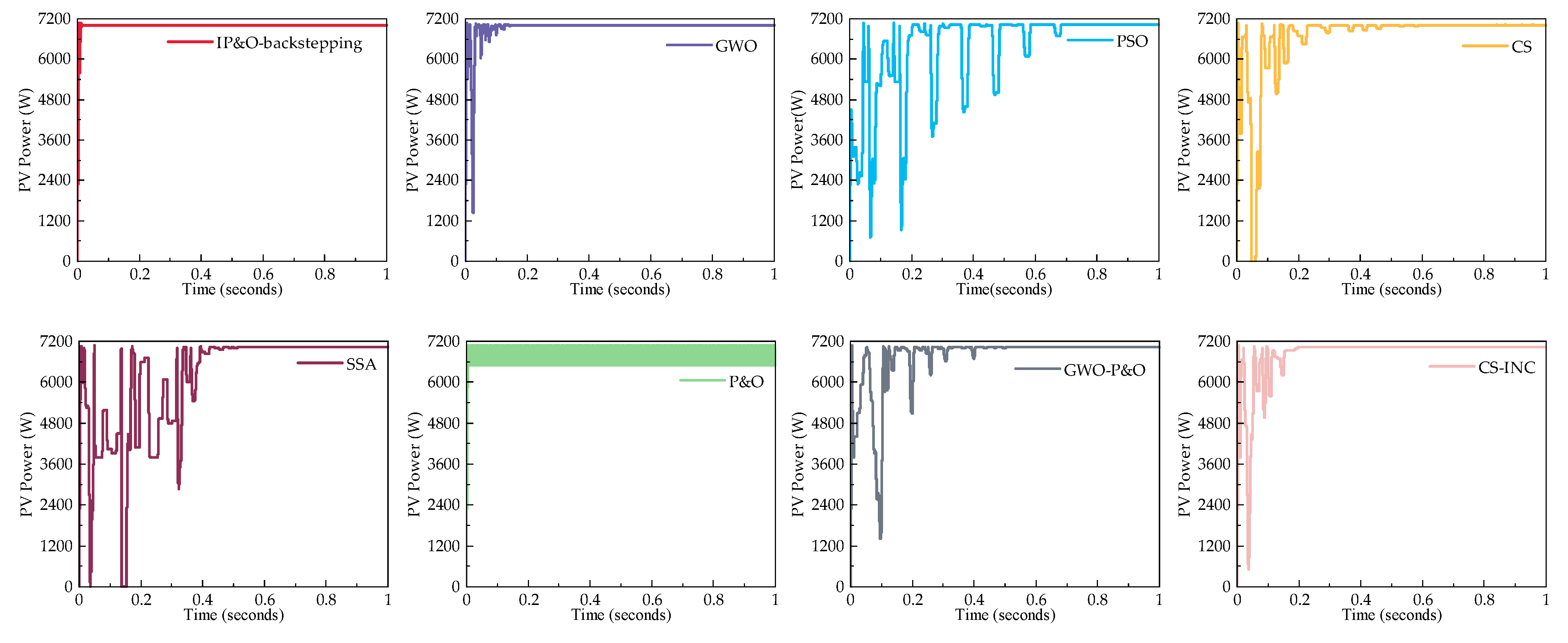
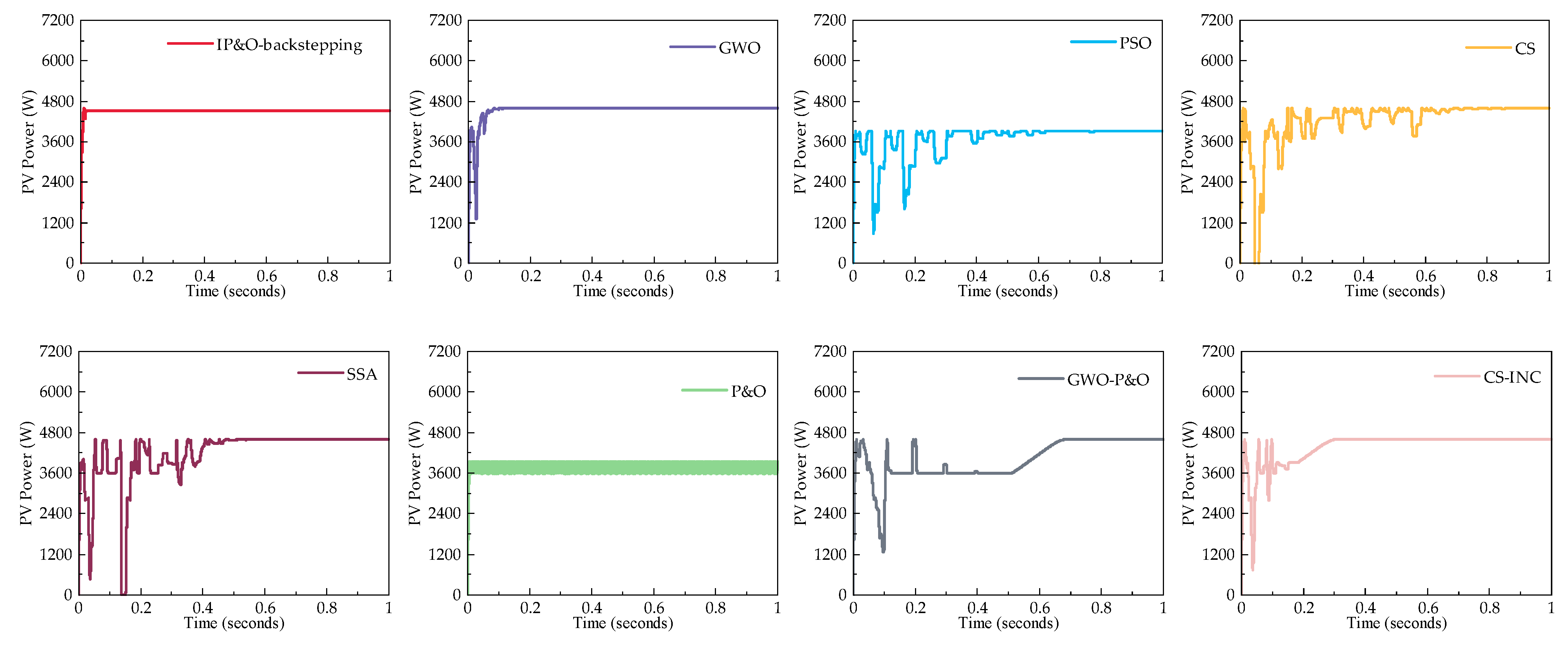
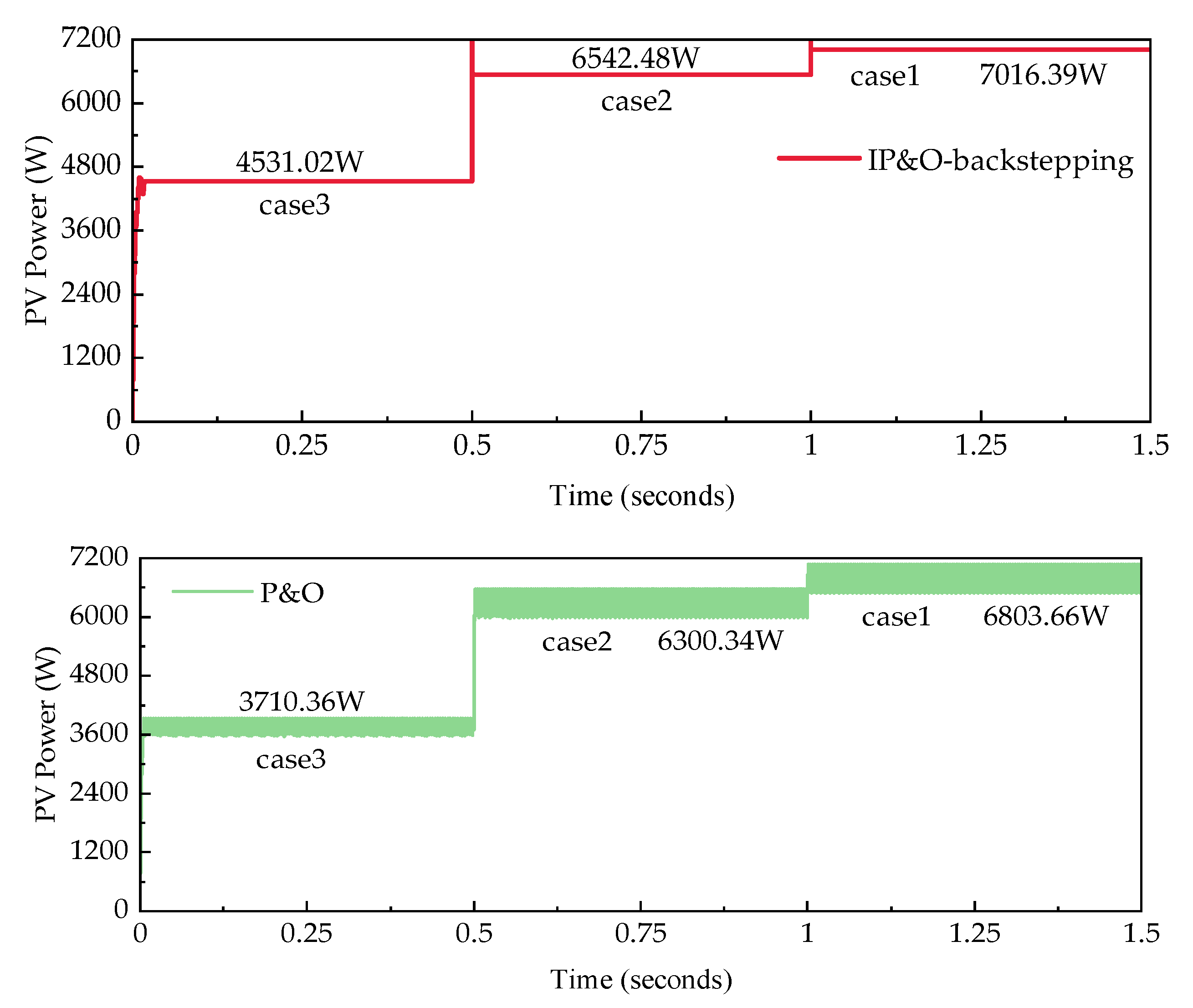
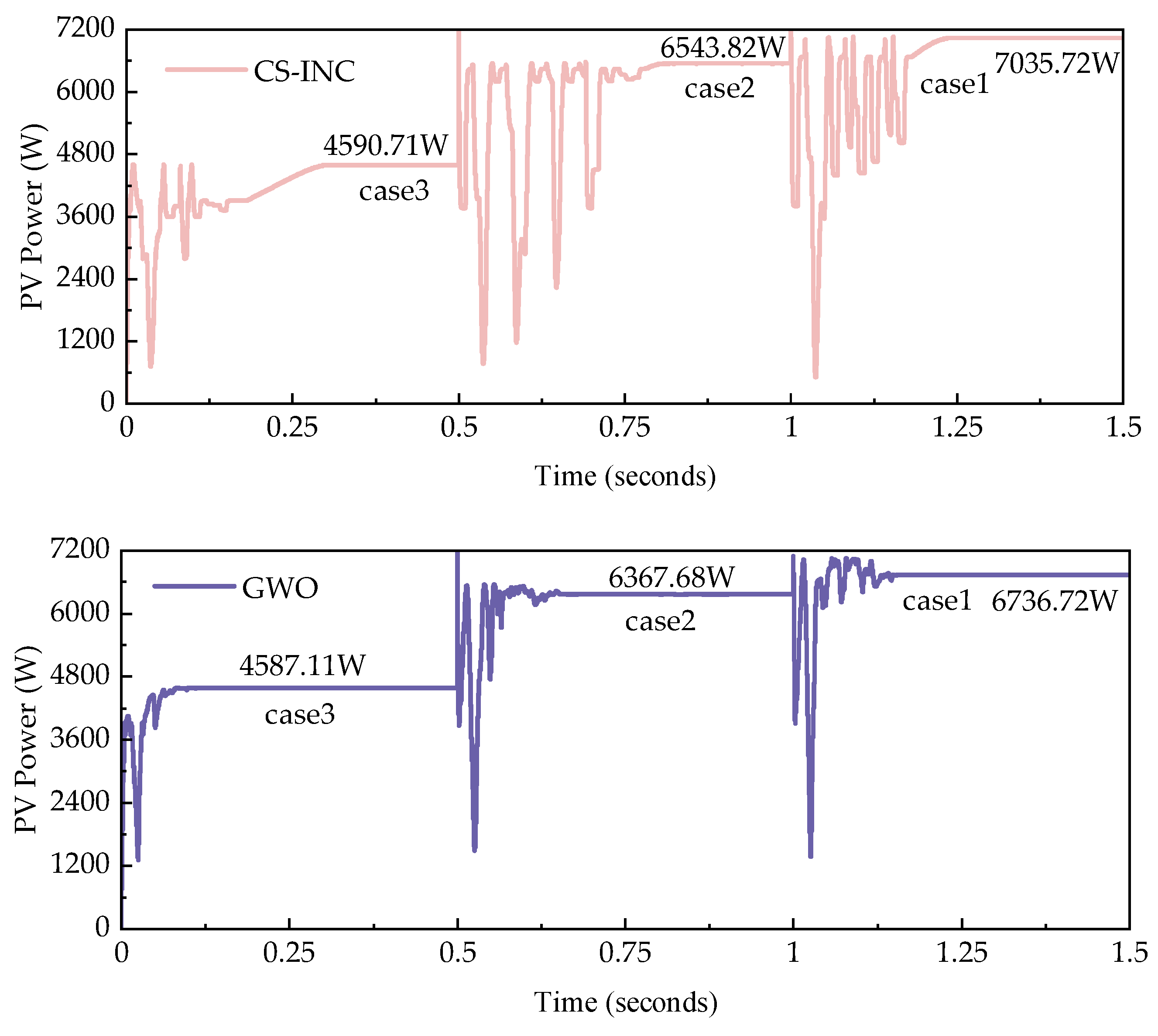
- Under case 1, all eight algorithms successfully track the maximum power point. The tracking time of the P&O algorithm is as short as 0.005 s, but the step size of the algorithm is too large, leading to excessive power oscillation and instability in the algorithm. The IP&O-backstepping algorithm proposed in this article has a very short tracking time of only 0.013 s, and the algorithm maintains stable power with no oscillations after tracking to the maximum power point. Among the remaining six algorithms, the GWO-P&O algorithm has the highest tracking accuracy at 99.998%. The CS-INC algorithm performs well overall, but the tracking time is also 0.205 s. The CS algorithm, SSA algorithm and PSO algorithm also have good tracking accuracy, but their tracking times all exceed 0.5 s. The tracking time of the GWO algorithm is relatively short compared to other intelligent optimization algorithms, and the algorithm tracking time is 0.151 s.
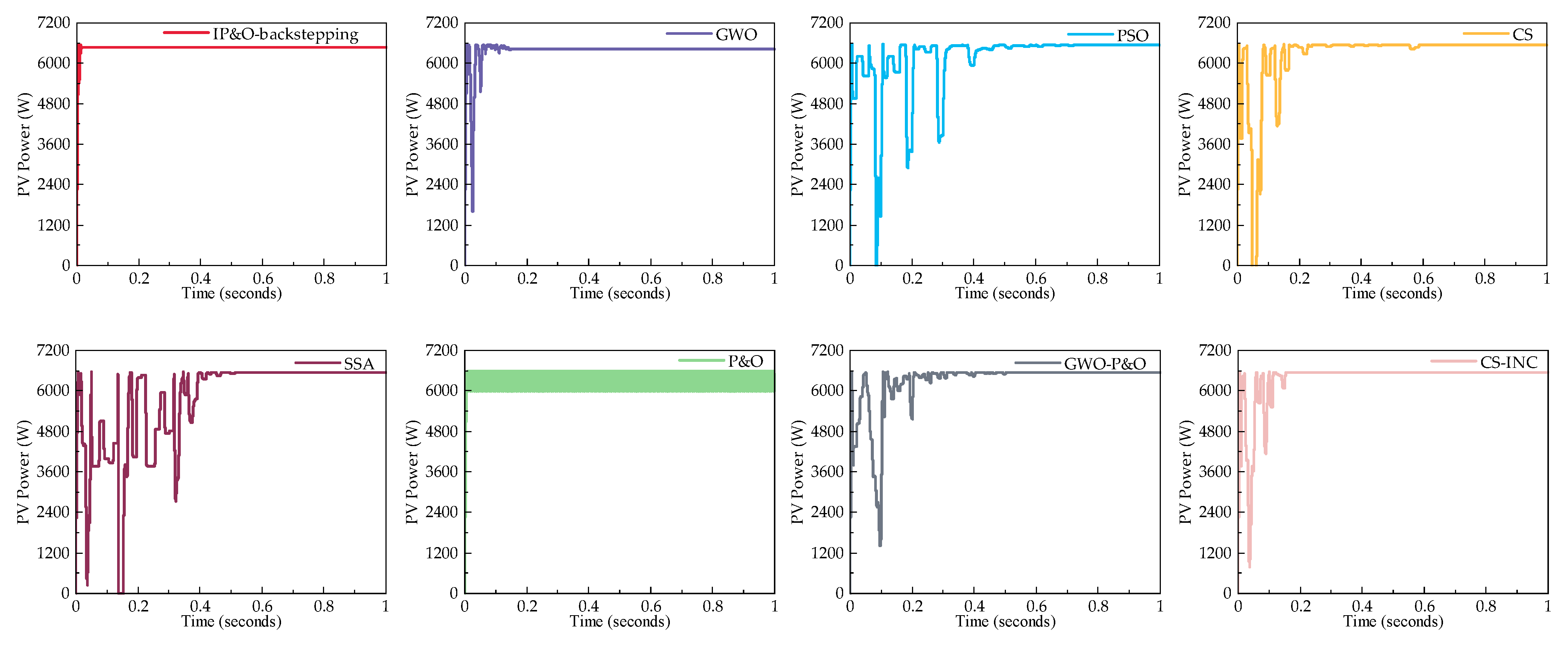
- Under case 2, all eight algorithms successfully track the maximum power point. Respectively, the shortest tracking times for both the P&O algorithm and the IP&O-backstepping method proposed in this paper are 0.006 s and 0.015 s. The P&O algorithm exhibits oscillations while the method proposed in this paper remains stable. Among the other six algorithms, the GWO algorithm has the shortest tracking time at 0.151 s. The tracking times for the PSO, SSA, CS and GWO-P&O algorithms are all over 0.5 s, but their tracking accuracy exceeds 99%. The overall performance of the CS-INC algorithm is quite good, and its tracking accuracy is 99.944% while its tracking time is 0.154 s.
- Under case 3, six algorithms track the maximum power point. The P&O algorithm and the PSO algorithm fall into local extremum points. The IP&O-backstepping algorithm proposed in this paper has the shortest time among the six other algorithms for tracking the maximum power point. The tracking time of the GWO algorithm is 0.113 s, making it the fastest among other intelligent optimization algorithms. The tracking times for the CS-INC algorithm, GWO-P&O algorithm, SSA algorithm and CS algorithm are all over 0.5 s.
5. Conclusions
- The speed advantage of traditional MPPT algorithms.
- The ability of intelligent optimization algorithms to avoid getting stuck in local extremum points.
- Minimal power oscillation after the algorithm tracks the maximum power point.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fan, G.; Duan, B.; Zhang, Y.; Yang, Y.; Ji, X.; Li, X. Secondary concentrator design of an updated space solar power satellite with a spherical concentrator. Sol. Energy 2021, 214, 400–408. [Google Scholar] [CrossRef]
- Hussaian Basha, C.; Palati, M.; Dhanamjayulu, C.; Muyeen, S.M.; Venkatareddy, P. A novel on design and implementation of hybrid MPPT controllers for solar PV systems under various partial shading conditions. Sci. Rep. 2024, 14, 1609. [Google Scholar] [CrossRef] [PubMed]
- Libra, M.; Kozelka, M.; Šafránková, J.; Belza, R.; Poulek, V.; Beránek, V.; Sedláček, J.; Zholobov, M.; Šubrt, T.; Severová, L.J.I.A. Agrivoltaics: Dual usage of agricultural land for sustainable development. Int. Agrophys 2024, 38, 121–126. [Google Scholar] [CrossRef]
- Hernandez Velasco, M. Enabling year-round cultivation in the nordics-agrivoltaics and adaptive LED lighting control of daily light integral. Agriculture 2021, 11, 1255. [Google Scholar] [CrossRef]
- Kahani, R.; Jamil, M.; Iqbal, M.T. An improved perturb and observed maximum power point tracking algorithm for photovoltaic power systems. J. Mod. Power Syst. Clean Energy 2022, 11, 1165–1175. [Google Scholar] [CrossRef]
- Srikanth, M.; Yadlapati, K. MPPT Techniques Exploration under Uniform and Non-Uniform Solar Irradiance Condition–A Survey. In E3S Web of Conferences; EDP Sciences: Evry, France, 2024; Volume 472. [Google Scholar]
- Tajuddin, M.F.N.; Arif, M.S.; Ayob, S.M.; Salam, Z. Perturbative methods for maximum power point tracking (MPPT) of photovoltaic (PV) systems: A review. Int. J. Energy Res. 2015, 39, 1153–1178. [Google Scholar] [CrossRef]
- Celik, B.; Karatepe, E.; Gokmen, N.; Silvestre, S. A virtual reality study of surrounding obstacles on BIPV systems for estimation of long-term performance of partially shaded PV arrays. Renew. Energy 2013, 60, 402–414. [Google Scholar] [CrossRef]
- Ramli, M.A.; Twaha, S.; Ishaque, K.; Al-Turki, Y.A. A review on maximum power point tracking for photovoltaic systems with and without shading conditions. Renew. Sustain. Energy Rev. 2017, 67, 144–159. [Google Scholar] [CrossRef]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Operating characteristics of the P&O algorithm at high perturbation frequencies for standalone PV systems. IEEE Trans. Energy Convers. 2014, 30, 189–198. [Google Scholar]
- Yilmaz, M. Comparative Analysis of Hybrid Maximum Power Point Tracking Algorithms Using Voltage Scanning and Perturb and Observe Methods for Photovoltaic Systems under Partial Shading Conditions. Sustainability 2024, 16, 4199. [Google Scholar] [CrossRef]
- Chellakhi, A.; El Beid, S.; Abouelmahjoub, Y.; Mchaouar, Y. Optimization of power extracting from photovoltaic systems based on a novel adaptable step INC MPPT approach. IFAC-PapersOnLine 2022, 55, 508–513. [Google Scholar] [CrossRef]
- Vijayakumari, A. A non-iterative MPPT of PV array with online measured short circuit and open circuit quantities. J. King Saud Univ.-Eng. Sci. 2021, 33, 176–185. [Google Scholar] [CrossRef]
- Yu, G.R.; Chang, Y.D.; Lee, W.S. Maximum Power Point Tracking of Photovoltaic Generation System Using Improved Quantum-Behavior Particle Swarm Optimization. Biomimetics 2024, 9, 223. [Google Scholar] [CrossRef]
- Liu, F.; Gao, J.; Liu, H. A fault diagnosis solution of rolling bearing based on MEEMD and QPSO-LSSVM. IEEE Access 2020, 8, 101476–101488. [Google Scholar] [CrossRef]
- Anbarasi, M.P.; Kanthalakshmi, S. Power maximization in standalone photovoltaic system: An adaptive PSO approach. Soft Comput. 2023, 27, 8223–8232. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A new MPPT design using grey wolf optimization technique for photovoltaic system under partial shading conditions. IEEE Trans. Sustain. Energy 2015, 7, 181–188. [Google Scholar] [CrossRef]
- Silaa, M.Y.; Barambones, O.; Bencherif, A.; Rahmani, A. A New MPPT-Based Extended Grey Wolf Optimizer for Stand-Alone PV System: A Performance Evaluation versus Four Smart MPPT Techniques in Diverse Scenarios. Inventions 2023, 8, 142. [Google Scholar] [CrossRef]
- Gundogdu, H.; Demirci, A.; Tercan, S.M.; Cali, U. A novel improved grey wolf algorithm based global maximum power point tracker method considering partial shading. IEEE Access 2024, 12, 6148–6159. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009. [Google Scholar]
- Ahmed, J.; Salam, Z. A Maximum Power Point Tracking (MPPT) for PV system using Cuckoo Search with partial shading capability. Appl. Energy 2014, 119, 118–130. [Google Scholar] [CrossRef]
- Liu, X.; Zou, H. Photovoltaic MPPT based on improved Cuckoo algorithm. J. Phys. Conf. Ser. 2024, 2814, 012001. [Google Scholar] [CrossRef]
- Eltamaly, A.M. An improved cuckoo search algorithm for maximum power point tracking of photovoltaic systems under partial shading conditions. Energies 2021, 14, 953. [Google Scholar] [CrossRef]
- Zaghba, L.; Borni, A.; Khennane, M.; Fezzani, A.; Bouchakour, A. An efficient, intelligent PSO-P&O-PI MPPT mechanism for Photovoltaic Systems under variable climatic conditions. J. Renew. Energ. 2024, 27, 15–33. [Google Scholar]
- Figueiredo, S.; e Silva, R.N.A.L. Hybrid MPPT technique PSO-P&O applied to photovoltaic systems under uniform and partial shading conditions. IEEE Lat. Am. Trans. 2021, 19, 1610–1617. [Google Scholar]
- Chtita, S.; Motahhir, S.; El Hammoumi, A.; Chouder, A.; Benyoucef, A.S.; El Ghzizal, A.; Derouich, A.; Abouhawwash, M.; Askar, S.S. A novel hybrid GWO–PSO-based maximum power point tracking for photovoltaic systems operating under partial shading conditions. Sci. Rep. 2022, 12, 10637. [Google Scholar] [CrossRef]
- Chauhan, U.; Chhabra, H.; Rani, A.; Kumar, B.; Singh, V. Efficient MPPT controller for solar PV system using GWO-CS optimized fuzzy logic control and conventional incremental conductance technique. Iran. J. Sci. Technol. Trans. Electr. Eng. 2023, 47, 463–472. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, G.; Xue, Y.; Xia, D.; Wang, J.; Hu, Z. Improvement of maximum power point tracking in photovoltaic arrays in different environments using hybrid algorithms. Optoelectron. Lett. 2024, 20, 28–34. [Google Scholar] [CrossRef]
- Kumar, M.; Panda, K.P.; Rosas-Caro, J.C.; Valderrabano-Gonzalez, A.; Panda, G. Comprehensive review of conventional and emerging maximum power point tracking algorithms for uniformly and partially shaded solar photovoltaic systems. IEEE Access 2023, 11, 31778–31812. [Google Scholar] [CrossRef]
- Chiu, C.-S.; Ouyang, Y.-L.; Ku, C.-Y. Terminal sliding mode control for maximum power point tracking of photovoltaic power generation systems. Sol. Energy 2012, 86, 2986–2995. [Google Scholar] [CrossRef]
- De Oliveira, F.M.; Brandt, M.H.M.; Salvadori, F.; Izquierdo, J.E.E.; Cavallari, M.R.; Ando Junior, O.H. Development of an MPPT-Based Genetic Algorithm for Photovoltaic Systems versus Classical MPPT Techniques in Scenarios with Partial Shading. Inventions 2024, 9, 64. [Google Scholar] [CrossRef]
- Jalil, M.F.; Khatoon, S.; Nasiruddin, I.; Bansal, R.C. Review of PV array modelling, configuration and MPPT techniques. Int. J. Model. Simul. 2022, 42, 533–550. [Google Scholar] [CrossRef]
- Kobayashi, K.; Takano, I.; Sawada, Y. A study on a two stage maximum power point tracking control of a photovoltaic system under partially shaded insolation conditions. In Proceedings of the 2003 IEEE Power Engineering Society General Meeting, (IEEE Cat. No. 03CH37491), Toronto, ON, Canada, 13–17 July 2003; Volume 4, pp. 2612–2617. [Google Scholar]
- Onat, N. Recent developments in maximum power point tracking technologies for photovoltaic systems. Int. J. Photoenergy 2010, 2010, 245316. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Physical Quantity | Symbol | Numerical Value | Unit |
|---|---|---|---|
| photovoltaic cell output current | I | A | |
| photovoltaic cell output voltage | V | V | |
| light intensity | G | W/m2 | |
| ambient temperature | Tc | 298.15 | K |
| diode saturation current | Is | A | |
| diode ideal factor | A | 0.98119 | |
| parallel resistance | Rsh | 106.1817 | Ω |
| series resistance | Rs | 0.18964 | Ω |
| photogenerated current | Iph | 7.9642 | A |
| open circuit voltage | Voc | 36.06 | V |
| short circuit current | Isc | 7.95 | A |
| maximum power point voltage | Vm | 30.12 | V |
| maximum power point current | Im | 7.3 | A |
| maximum power | P | 219.876 | W |
| Symbol | Numerical Value | Unit |
|---|---|---|
| Cin | 550 | uF |
| L | 8 | mH |
| Cout | 12 | uF |
| CR | 0.1 | Ω |
| R | 20 | Ω |
| Cases | Irradiance (W/m2) | Power at GMPP (W) | |||
|---|---|---|---|---|---|
| PV1 | PV2 | PV3 | PV4 | ||
| 1 | 1000 | 1000 | 1000 | 1000 | 7035.83 |
| 2 | 1000 | 900 | 1000 | 900 | 6544.13 |
| 3 | 600 | 900 | 700 | 800 | 4590.75 |
| Pattern | Algorithms | Track Power (W) | Track Time (s) | Track Accuracy (%) |
|---|---|---|---|---|
| Case 1 | IP&O-backstepping | 7005.67 | 0.013 | 99.571 |
| GWO | 7002.88 | 0.151 | 99.532 | |
| PSO | 7034.66 | 0.688 | 99.983 | |
| CS | 7004.75 | 0.471 | 99.249 | |
| SSA | 7032.33 | 0.472 | 99.950 | |
| P&O | 6799.73 | 0.005 | 96.644 | |
| GWO-P&O | 7035.71 | 0.505 | 99.998 | |
| CS-INC | 7031.04 | 0.205 | 99.932 | |
| Case 2 | IP&O-backstepping | 6475.44 | 0.015 | 98.950 |
| GWO | 6420.62 | 0.151 | 98.113 | |
| PSO | 6541.39 | 0.726 | 99.958 | |
| CS | 6540.05 | 0.590 | 99.938 | |
| SSA | 6541.39 | 0.516 | 99.958 | |
| P&O | 6279.45 | 0.006 | 95.955 | |
| GWO-P&O | 6541.59 | 0.504 | 99.961 | |
| CS-INC | 6540.44 | 0.154 | 99.944 | |
| Case 3 | IP&O-backstepping | 4530.39 | 0.018 | 98.685 |
| GWO | 4590.12 | 0.113 | 99.986 | |
| PSO | 3909.25 | 0.625 | 85.155 | |
| CS | 4590.05 | 0.815 | 99.985 | |
| SSA | 4590.67 | 0.519 | 99.998 | |
| P&O | 3752.48 | 0.006 | 81.740 | |
| GWO-P&O | 4588.39 | 0.679 | 99.949 | |
| CS-INC | 4590.47 | 0.303 | 99.994 |
| Pattern | Algorithms | Track Time (s) |
|---|---|---|
| Case 3 | IP&O-backstepping | 0.013 |
| P&O | 0.007 | |
| CS-INC | 0.302 | |
| GWO | 0.096 | |
| Case 2 | IP&O-backstepping | 0.004 |
| P&O | 0.002 | |
| CS-INC | 0.303 | |
| GWO | 0.151 | |
| Case 1 | IP&O-backstepping | 0.006 |
| P&O | 0.006 | |
| CS-INC | 0.232 | |
| GWO | 0.163 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Sun, L. Photovoltaic Maximum Power Point Tracking Technology Based on Improved Perturbation Observation Method and Backstepping Algorithm. Electronics 2024, 13, 3960. https://doi.org/10.3390/electronics13193960
Wang Y, Sun L. Photovoltaic Maximum Power Point Tracking Technology Based on Improved Perturbation Observation Method and Backstepping Algorithm. Electronics. 2024; 13(19):3960. https://doi.org/10.3390/electronics13193960
Chicago/Turabian StyleWang, Yulin, and Liying Sun. 2024. "Photovoltaic Maximum Power Point Tracking Technology Based on Improved Perturbation Observation Method and Backstepping Algorithm" Electronics 13, no. 19: 3960. https://doi.org/10.3390/electronics13193960