AnomalySeg: Deep Learning-Based Fast Anomaly Segmentation Approach for Surface Defect Detection


Abstract
:1. Introduction
2. Materials and Methods
2.1. Dataset Preparation
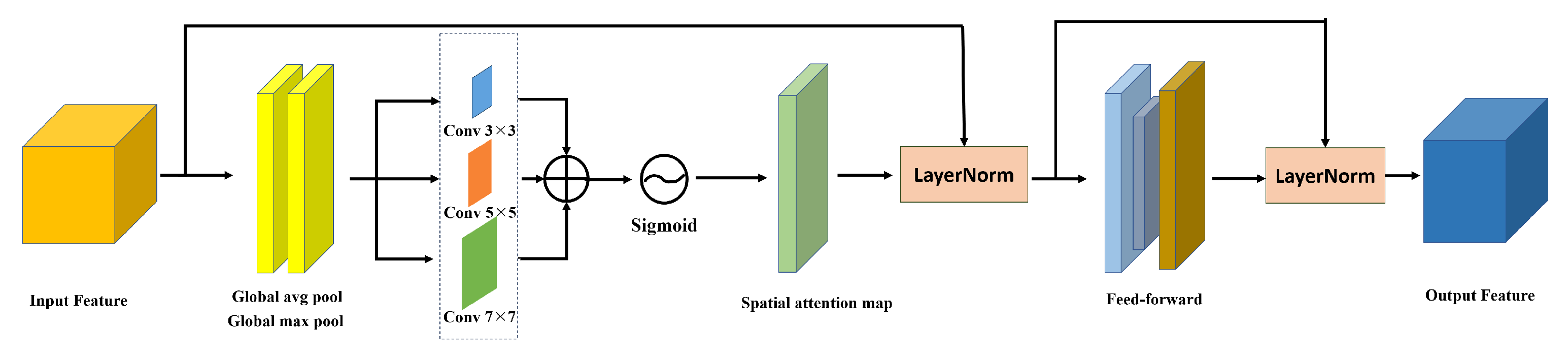
2.2. Network Architecture
2.3. Loss Function
3. Experimental Details
3.1. Hyperparameters
3.2. Balancing the Loss Term
4. Experimental Results and Discussion
4.1. Choosing Network Structures
- SAFM Res UNet, the architecture implemented in AnomalySeg (Figure 4) with spatial attention feed-forward residual blocks.
- Res UNet, modifying the SAFM residual blocks in SAFM Res UNet to residual blocks.
- SE Res UNet, modifying the SAFM residual blocks in SAFM Res UNet to SE residual blocks.
- CBAM Res UNet, modifying the SAFM residual blocks in SAFM Res UNet to CBAM residual blocks.
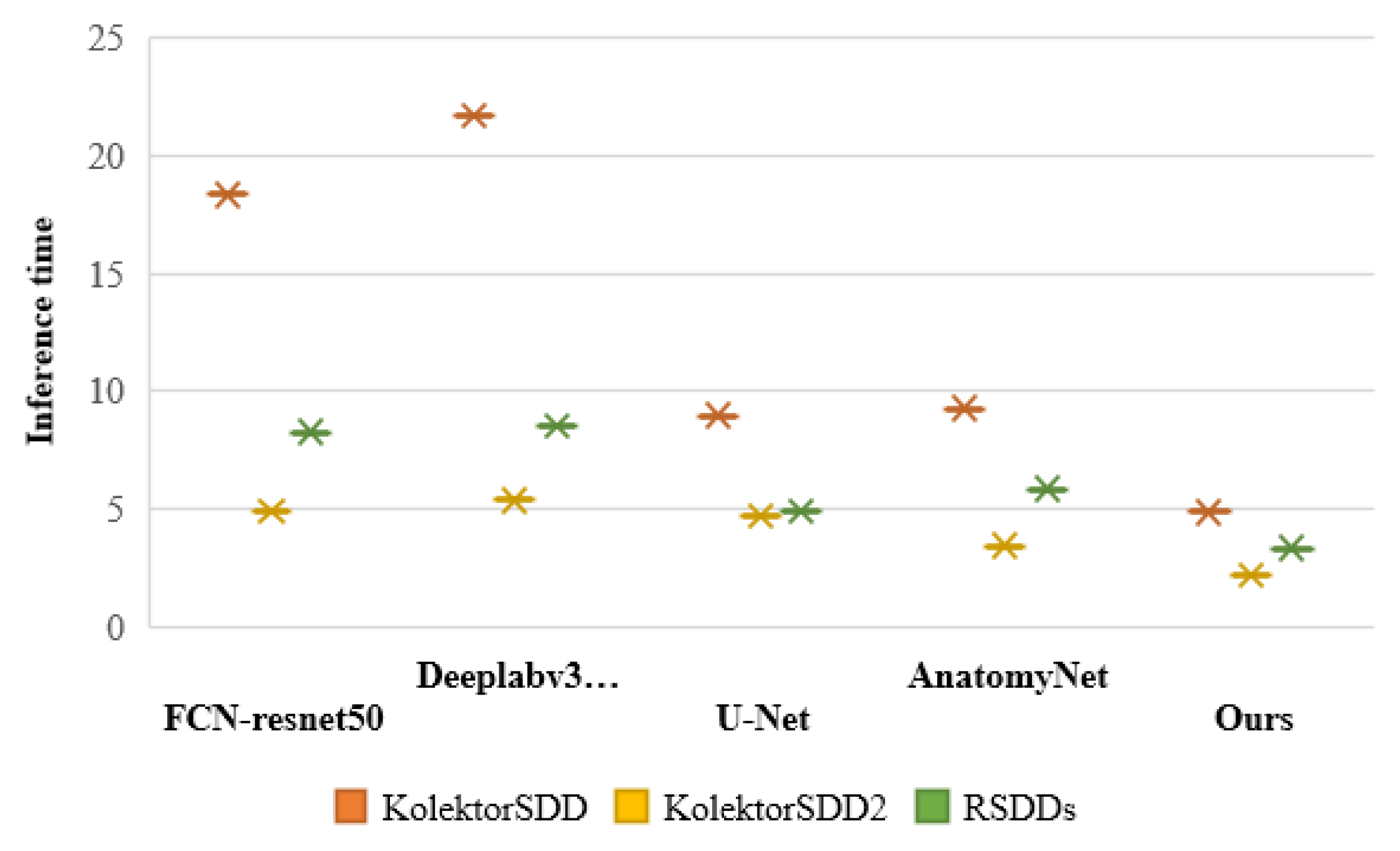
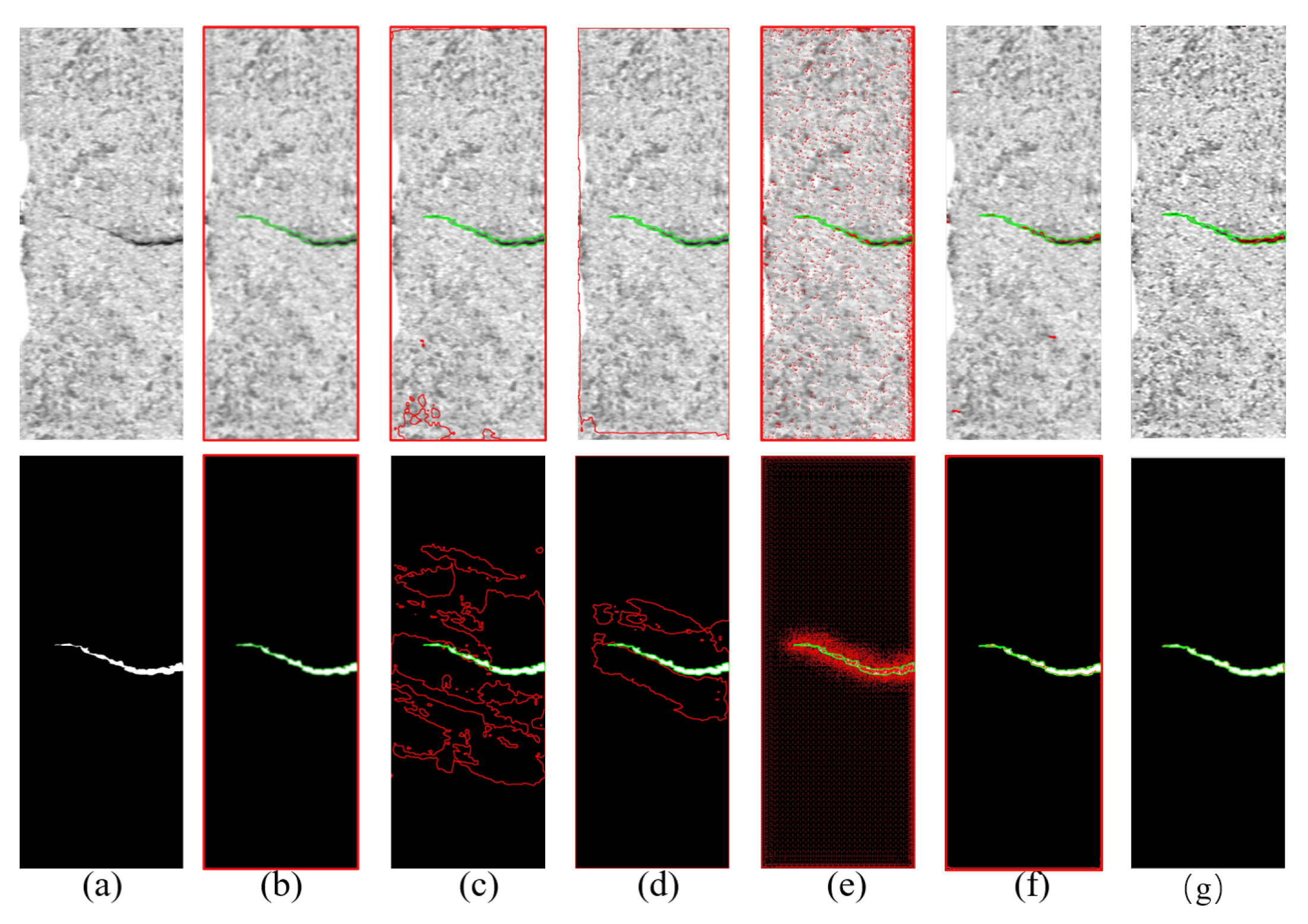
4.2. Comparing to Generic Segmentation Methods
5. Conclusions and Future Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Alvarenga, T.A.; Carvalho, A.L.; Honorio, L.M.; Cerqueira, A.S.; Filho, L.M.; Nobrega, R.A. Detection and classification system for rail surface defects based on Eddy current. Sensors 2021, 21, 7937. [Google Scholar] [CrossRef] [PubMed]
- Jia, Y.; Lu, Y.; Xiong, L.; Zhang, Y.; Wang, P.; Zhou, H. A Filtering Method for Suppressing the Lift-Off Interference in Magnetic Flux Leakage Detection of Rail Head Surface Defect. Appl. Sci. 2022, 12, 1740. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, Y.; Wen, Y. An imaging algorithm of planar array capacitance sensor for defect detection. Measurement 2021, 168, 108466. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Q.; Zhang, L.; Yu, J.; Liu, Q. Three-Dimensional Defect Characterization of Ultrasonic Detection Based on GCNet Improved Contrast Learning Optimization. Electronics 2023, 12, 3944. [Google Scholar] [CrossRef]
- Zhang, D.; Hao, X.; Wang, D.; Qin, C.; Zhao, B.; Liang, L.; Liu, W. An efficient lightweight convolutional neural network for industrial surface defect detection. Artif. Intell. Rev. 2023, 56, 10651–10677. [Google Scholar] [CrossRef]
- Guo, B.; Wang, Y.; Zhen, S.; Yu, R.; Su, Z. SPEED: Semantic Prior and Extremely Efficient Dilated Convolution Network for Real-Time Metal Surface Defects Detection. IEEE Trans. Ind. Inform. 2023, 19, 11380–11390. [Google Scholar] [CrossRef]
- Liu, R.; Huang, M.; Gao, Z.; Cao, Z.; Cao, P. MSC-DNet: An efficient detector with multi-scale context for defect detection on strip steel surface. Measurement 2023, 209, 112467. [Google Scholar] [CrossRef]
- Zhao, W.; Song, K.; Wang, Y.; Liang, S.; Yan, Y. FaNet: Feature-aware Network for Few Shot Classification of Strip Steel Surface Defects. Measurement 2023, 208, 112446. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, J.; He, Z. A Multiple Feature-maps Interaction Pyramid Network for Defect Detection of Steel Surface. Meas. Sci. Technol. 2023, 34, 055401. [Google Scholar] [CrossRef]
- Zheng, Z.; Hu, Y.; Zhang, Y.; Yang, H.; Qiao, Y.; Qu, Z.; Huang, Y. Casppnet: A chained atrous spatial pyramid pooling network for steel defect detection. Meas. Sci. Technol. 2022, 33, 085403. [Google Scholar] [CrossRef]
- Chouhad, H.; El Mansori, M.; Knoblauch, R.; Corleto, C. Smart data driven defect detection method for surface quality control in manufacturing. Meas. Sci. Technol. 2021, 32, 105403. [Google Scholar] [CrossRef]
- Shu, Y.; Li, B.; Lin, H. Quality Safety Monitoring of LED Chips Using Deep Learning-Based Vision Inspection Methods. Measurement 2021, 168, 108123. [Google Scholar] [CrossRef]
- Dai, W.; Mujeeb, A.; Erdt, M.; Sourin, A. Soldering Defect Detection in Automatic Optical Inspection. Adv. Eng. Inform. 2020, 43, 101004. [Google Scholar] [CrossRef]
- Chow, J.; Su, Z.; Wu, J.; Tan, P.; Mao, X.; Wang, Y. Anomaly Detection of Defects on Concrete Structures with the Convolutional Autoencoder. Adv. Eng. Inform. 2020, 45, 101105. [Google Scholar] [CrossRef]
- Chen, J.; Liu, D. Bottom-up Image Detection of Water Channel Slope Damages Based on Superpixel Segmentation and Support Vector Machine. Adv. Eng. Inform. 2021, 47, 101205. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, Y.; Sun, H.; Huang, W. Pavement Crack Detection Using Hessian Structure Propagation. Adv. Eng. Inform. 2021, 49, 101303. [Google Scholar] [CrossRef]
- Li, D.; Xie, Q.; Gong, X.; Yu, Z.; Xu, J.; Sun, Y.; Wang, J. Automatic Defect Detection of Metro Tunnel Surfaces Using a Vision-Based Inspection System. Adv. Eng. Inform. 2021, 47, 101206. [Google Scholar] [CrossRef]
- Yin, X.; Chen, Y.; Bouferguene, A.; Zaman, H.; Al-Hussein, M.; Kurach, L. A Deep Learning-Based Framework for an Automated Defect Detection System for Sewer Pipes. Autom. Constr. 2020, 109, 102967. [Google Scholar] [CrossRef]
- Gharesi, N.; Arefi, M.M.; Razavi-Far, R.; Zarei, J.; Yin, S. A Neuro-Wavelet Based Approach for Diagnosing Bearing Defects. Adv. Eng. Inform. 2020, 46, 101172. [Google Scholar] [CrossRef]
- Tabernik, D.; Šela, S.; Skvarč, J.; Skočaj, D. Segmentation-Based Deep-Learning Approach for Surface-Defect Detection. J. Intell. Manuf. 2020, 31, 759–776. [Google Scholar] [CrossRef]
- Chen, L.C.; Pardeshi, M.S.; Lo, W.T.; Sheu, R.K.; Pai, K.C.; Chen, C.Y.; Tsai, P.Y.; Tsai, Y.T. Edge-glued wooden panel defect detection using deep learning. Wood Sci. Technol. 2022, 56, 477–507. [Google Scholar] [CrossRef]
- Kang, G.; Gao, S.; Yu, L.; Zhang, D. Deep Architecture for High-Speed Railway Insulator Surface Defect Detection: Denoising Autoencoder With Multitask Learning. IEEE Trans. Instrum. Meas. 2019, 68, 2679–2690. [Google Scholar] [CrossRef]
- Zorić, B.; Matić, T.; Hocenski, Ž. Classification of Biscuit Tiles for Defect Detection Using Fourier Transform Features. ISA Trans. 2022, 125, 400–414. [Google Scholar] [CrossRef] [PubMed]
- Jia, L.; Chen, C.; Xu, S.; Shen, J. Fabric Defect Inspection Based on Lattice Segmentation and Template Statistics. Inf. Sci. 2020, 512, 964–984. [Google Scholar] [CrossRef]
- Mo, D.; Wong, W.K.; Lai, Z.; Zhou, J. Weighted Double-Low-Rank Decomposition with Application to Fabric Defect Detection. IEEE Trans. Automat. Sci. Eng. 2021, 18, 1170–1190. [Google Scholar] [CrossRef]
- Riana, D.; Rahayu, S.; Hasan, M. Comparison of Segmentation and Identification of Swietenia Mahagoni Wood Defects with Augmentation Images. Heliyon 2021, 7, e07417. [Google Scholar] [CrossRef] [PubMed]
- Qi, Z.; Ni, P.; Jiang, W.; Qiu, X.; Wang, R.; Zhang, W. Quantitative Detection of Minor Defects in Metal Materials Based on Variation Coefficient of CT Image. Optik 2020, 223, 165269. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, M.; Zheng, P.; Yang, H.; Zou, J. A Smart Surface Inspection System Using Faster R-CNN in Cloud-Edge Computing Environment. Adv. Eng. Inform. 2020, 43, 101037. [Google Scholar] [CrossRef]
- He, Y.; Song, K.; Meng, Q.; Yan, Y. An End-to-End Steel Surface Defect Detection Approach via Fusing Multiple Hierarchical Features. IEEE Trans. Instrum. Meas. 2020, 69, 1493–1504. [Google Scholar] [CrossRef]
- Du, W.; Shen, H.; Fu, J.; Zhang, G.; He, Q. Approaches for Improvement of the X-ray Image Defect Detection of Automobile Casting Aluminum Parts Based on Deep Learning. NDT E Int. 2019, 107, 102144. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, D.; Lee, D.J. Automatic Fabric Defect Detection with a Wide-and-Compact Network. Neurocomputing 2019, 329, 329–338. [Google Scholar] [CrossRef]
- Zhou, T.; Zhang, J.; Su, H.; Zou, W.; Zhang, B. EDDs: A Series of Efficient Defect Detectors for Fabric Quality Inspection. Measurement 2021, 172, 108885. [Google Scholar] [CrossRef]
- Li, Y.; Huang, H.; Xie, Q.; Yao, L.; Chen, Q. Research on a Surface Defect Detection Algorithm Based on MobileNet-SSD. Appl. Sci. 2018, 8, 1678. [Google Scholar] [CrossRef]
- Chen, S.H.; Tsai, C.C. SMD LED Chips Defect Detection Using a YOLOv3-dense Model. Adv. Eng. Inform. 2021, 47, 101255. [Google Scholar] [CrossRef]
- Ho, C.C.; Hernandez, M.A.B.; Chen, Y.F.; Lin, C.J.; Chen, C.S. Deep residual neural network-based defect detection on complex backgrounds. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Yang, L.; Fan, J.; Huo, B.; Li, E.; Liu, Y. A nondestructive automatic defect detection method with pixelwise segmentation. Knowl.-Based Syst. 2022, 242, 108338. [Google Scholar] [CrossRef]
- Tao, X.; Zhang, D.; Ma, W.; Liu, X.; Xu, D. Automatic Metallic Surface Defect Detection and Recognition with Convolutional Neural Networks. Appl. Sci. 2018, 8, 1575. [Google Scholar] [CrossRef]
- Mei, S.; Yang, H.; Yin, Z. An Unsupervised-Learning-Based Approach for Automated Defect Inspection on Textured Surfaces. IEEE Trans. Instrum. Meas. 2018, 67, 1266–1277. [Google Scholar] [CrossRef]
- Li, X.; Zheng, Y.; Chen, B.; Zheng, E. Dual Attention-Based Industrial Surface Defect Detection with Consistency Loss. Sensors 2022, 22, 5141. [Google Scholar] [CrossRef]
- Božič, J.; Tabernik, D.; Skočaj, D. Mixed supervision for surface-defect detection: From weakly to fully supervised learning. Comput. Ind. 2021, 129, 103459. [Google Scholar] [CrossRef]
- Zhu, W.; Huang, Y.; Zeng, L.; Chen, X.; Liu, Y.; Qian, Z.; Du, N.; Fan, W.; Xie, X. AnatomyNet: Deep Learning for Fast and Fully Automated Whole-volume Segmentation of Head and Neck Anatomy. Med. Phys. 2019, 46, 576–589. [Google Scholar] [CrossRef] [PubMed]
- Khanam, S.; Ahmedy, I.; Idris, M.Y.I.; Jaward, M.H. Towards an Effective Intrusion Detection Model Using Focal Loss Variational Autoencoder for Internet of Things (IoT). Sensors 2022, 22, 5822. [Google Scholar] [CrossRef] [PubMed]
- Fan, J.; Hua, Q.; Li, X.; Wen, Z.; Yang, M. Biomedical sensor image segmentation algorithm based on improved fully convolutional network. Measurement 2022, 197, 111307. [Google Scholar] [CrossRef]
- Zhang, X.; Bian, H.; Cai, Y.; Zhang, K.; Li, H. An improved tongue image segmentation algorithm based on Deeplabv3+ framework. IET Image Process. 2022, 16, 1473–1485. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loss Functions | Methods | Kolektor | |
|---|---|---|---|
| DSC (%) | IOU (%) | ||
| Dice loss | UNet | 78.2 | 77.9 |
| Anomalyseg | 84.5 | 83.7 | |
| Focal loss | UNet | 71.5 | 70.9 |
| Anomalyseg | 88.5 | 87.5 | |
| Dice + Focal | UNet | 75.4 | 73.5 |
| Anomalyseg | 95.2 | 89.6 |
| Name | Configuration Information |
|---|---|
| Operation system | Ubuntu 18.04 |
| CPU | Intel CORE i5 8th Gen |
| GPU | NVIDIA GeForce RTX 2080 Ti 11G |
| Language | Python 3.7 |
| Deep learning framework | PyTorch 1.11.0 |
| Method | IoU (%) | DSC (%) | ||
|---|---|---|---|---|
| Kolektor | RSDDs | Kolektor | RSDDs | |
| Res UNet | 57.9 | 52.5 | 86.3 | 77.2 |
| SE Res UNet | 61.8 | 53.8 | 88.9 | 82.6 |
| CBAM Res UNet | 62.7 | 53.4 | 89.7 | 81.6 |
| SAFM Res UNet | 68.4 | 66.2 | 95.2 | 86.5 |
| Method | Parameters (M) | FLOPs (G) | DSC(%) | ||
|---|---|---|---|---|---|
| KolektorSDD | KolektorSDD2 | RSDDs | |||
| FCNResNet50 | 32.95 | 38.57 | 33.2 | 31.5 | 60.1 |
| DeepLabv3ResNet50 | 10.01 | 182.77 | 57.7 | 53.1 | 54.6 |
| UNet | 4.17 | 8.02 | 56.2 | 54.8 | 42.3 |
| UNet++ | 9.16 | 17.35 | 69.3 | 62.2 | 60.6 |
| AttenUnet | 34.88 | 30.23 | 72.5 | 69.5 | 58.4 |
| AnatomyNet | 0.602 | 11.28 | 86.3 | 80.4 | 72.9 |
| AnomalySeg | 2.37 | 42.35 | 95.2 | 92.9 | 86.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Xia, W.; Li, Y.; Li, H.; Yuan, M.; Zhang, Q. AnomalySeg: Deep Learning-Based Fast Anomaly Segmentation Approach for Surface Defect Detection. Electronics 2024, 13, 284. https://doi.org/10.3390/electronics13020284
Song Y, Xia W, Li Y, Li H, Yuan M, Zhang Q. AnomalySeg: Deep Learning-Based Fast Anomaly Segmentation Approach for Surface Defect Detection. Electronics. 2024; 13(2):284. https://doi.org/10.3390/electronics13020284
Chicago/Turabian StyleSong, Yongxian, Wenhao Xia, Yuanyuan Li, Hao Li, Minfeng Yuan, and Qi Zhang. 2024. "AnomalySeg: Deep Learning-Based Fast Anomaly Segmentation Approach for Surface Defect Detection" Electronics 13, no. 2: 284. https://doi.org/10.3390/electronics13020284