
Localization Optimization Algorithm Based on Phase Noise Compensation

Abstract
:1. Introduction
2. Problem Description
2.1. Existing DoA Estimation Models
2.2. DoA Estimation Model Affected by Phase Noise
2.3. The Impact of Phase Noise on DoA Estimation in SAA Systems
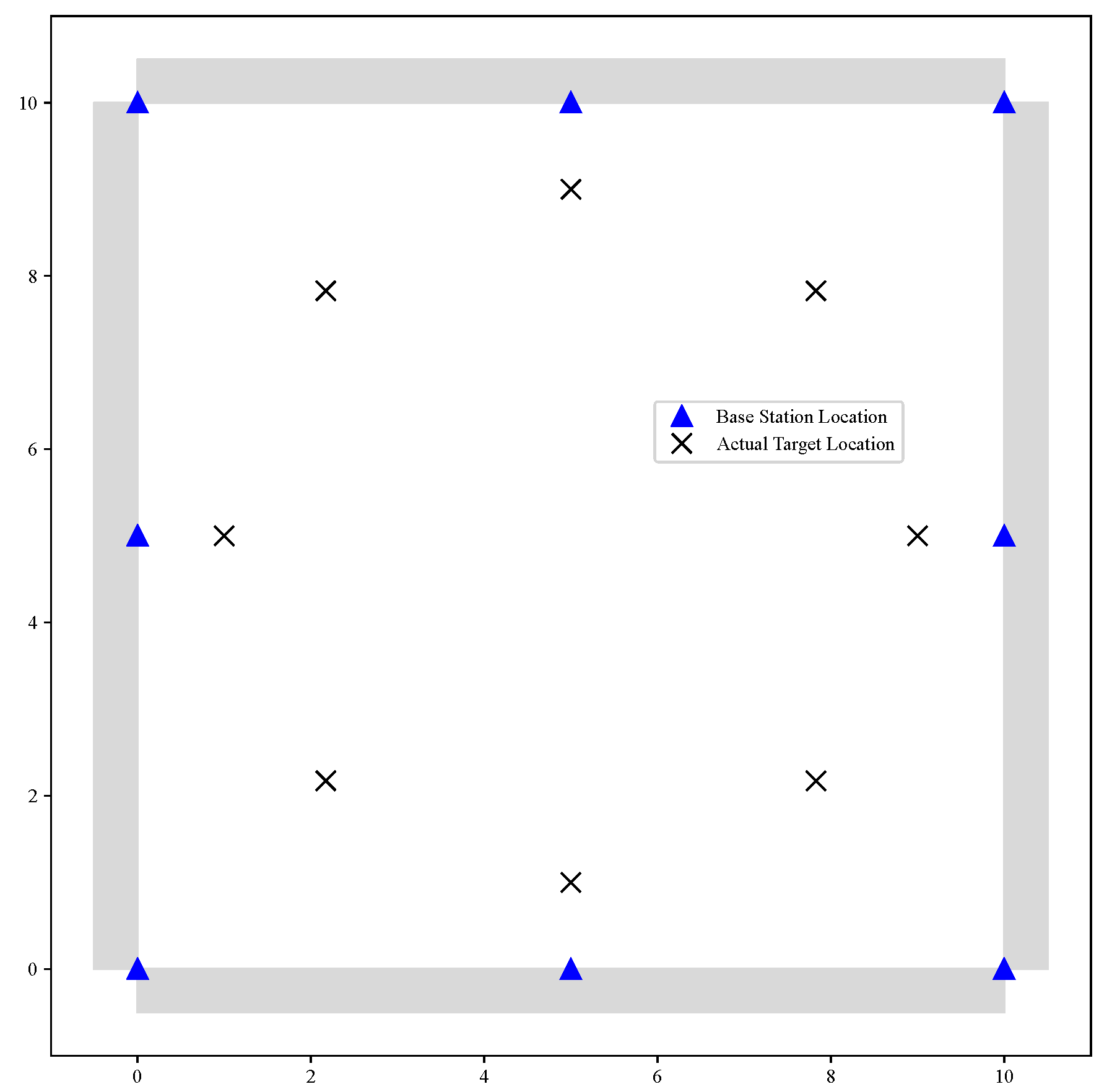
2.4. Localization Optimization Problem for Multiple Base Stations
3. Algorithm Description
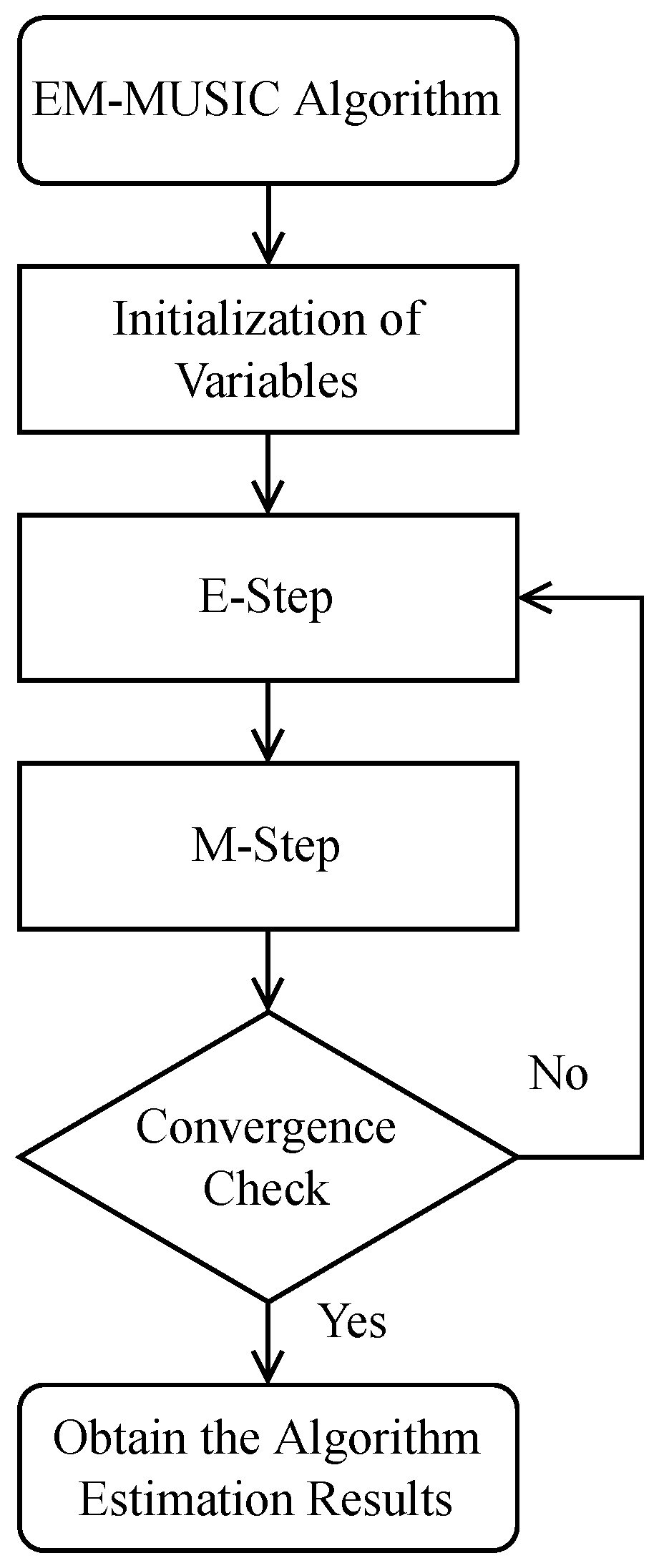
3.1. EM–MUSIC Algorithm
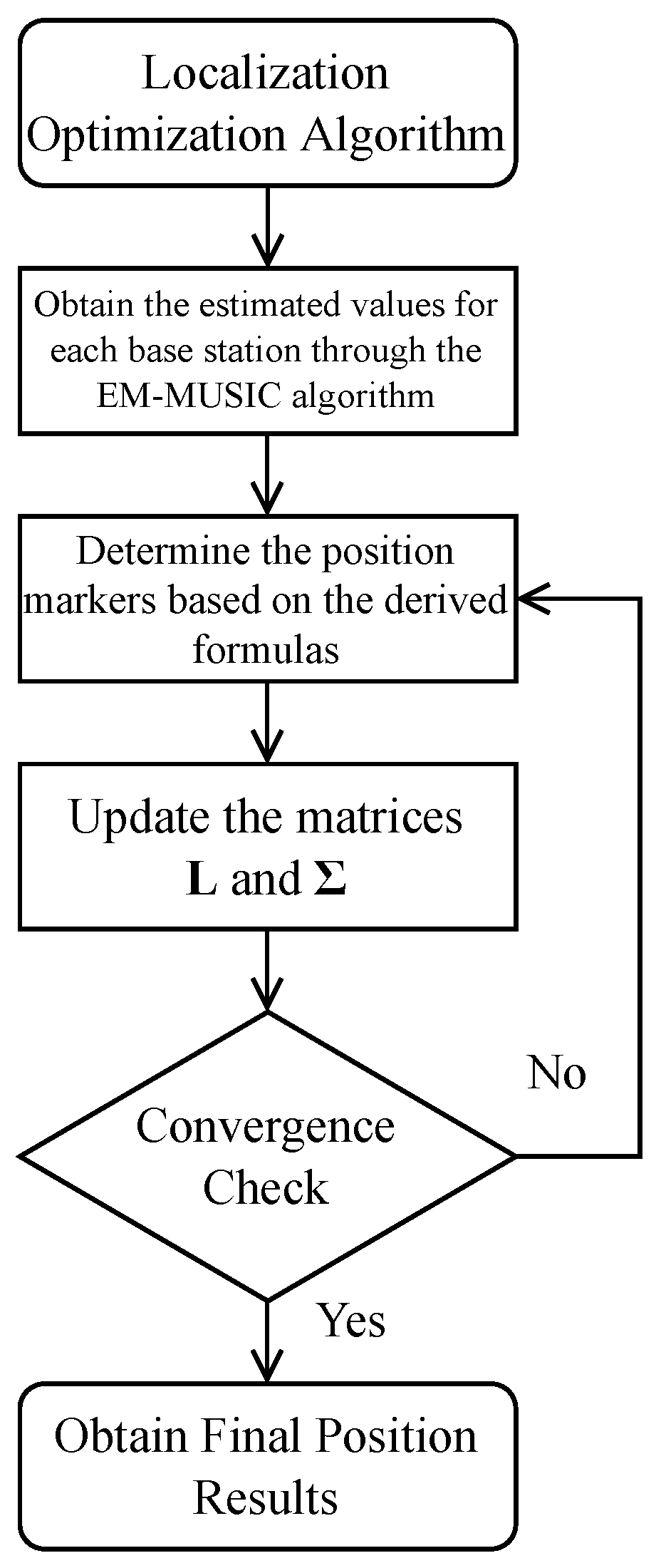
3.2. Optimization Algorithm for Multiple Base Stations
3.3. Complexity Analysis
4. Simulation Results
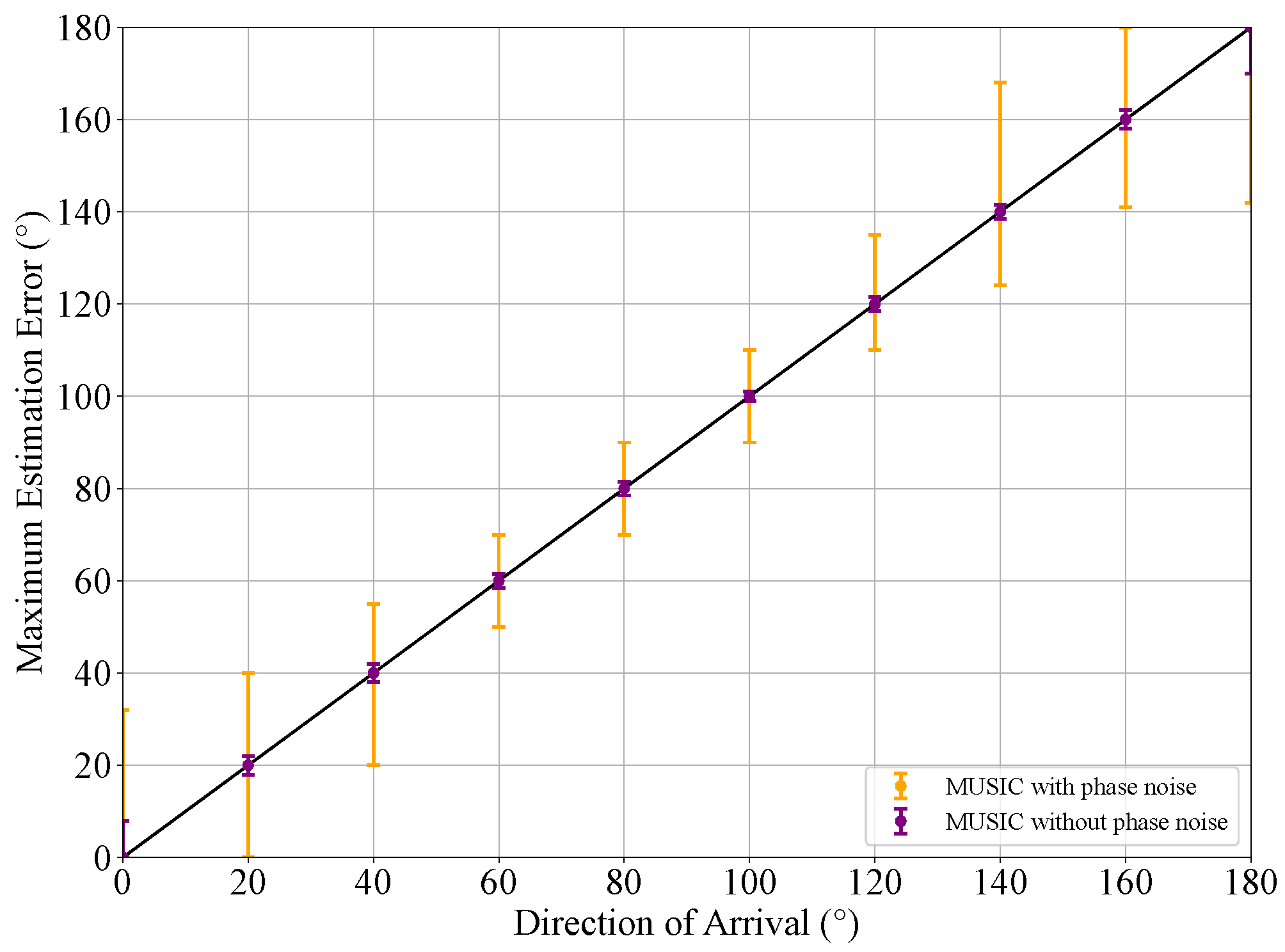
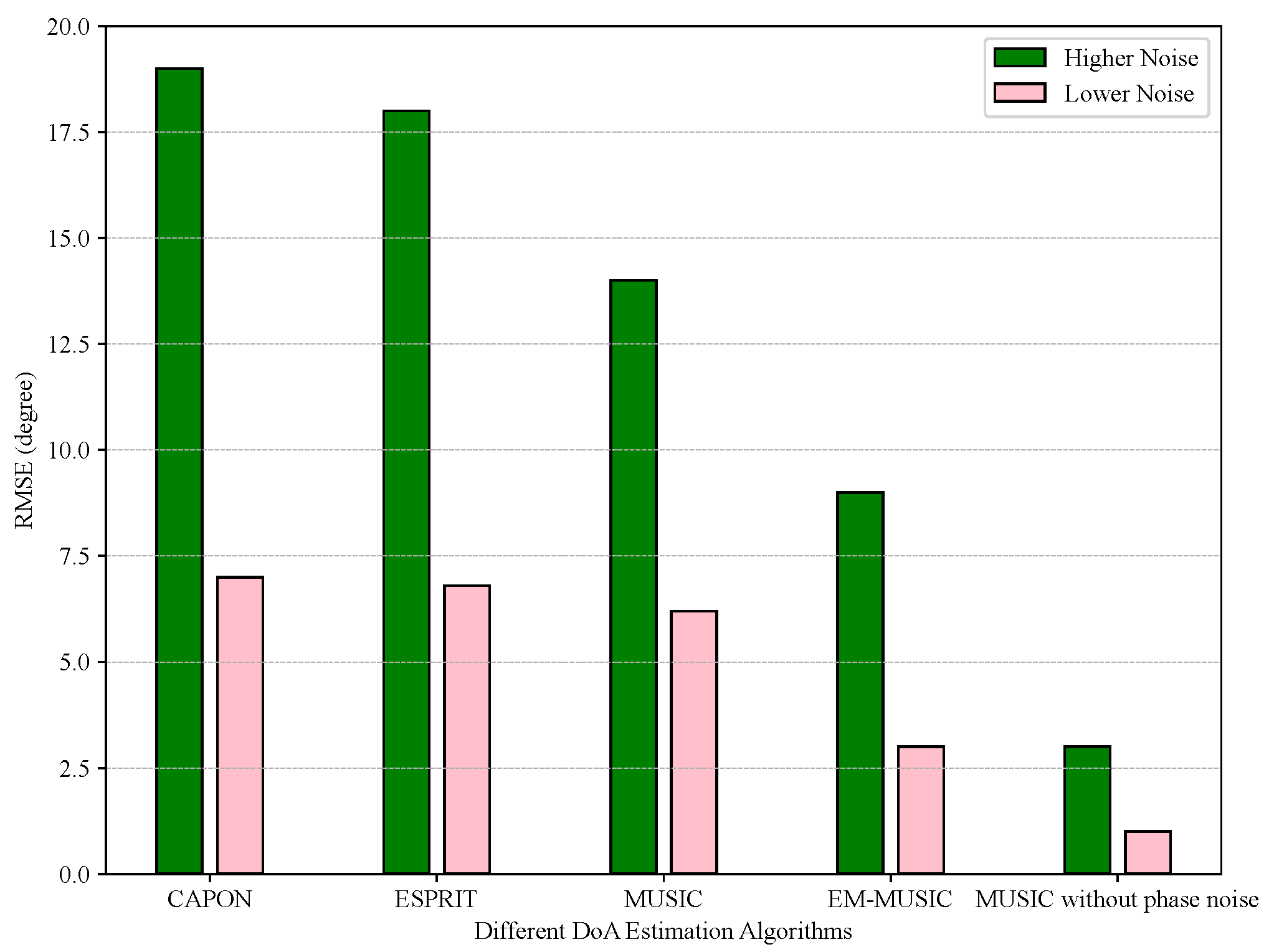
4.1. Performance of Angle Estimation
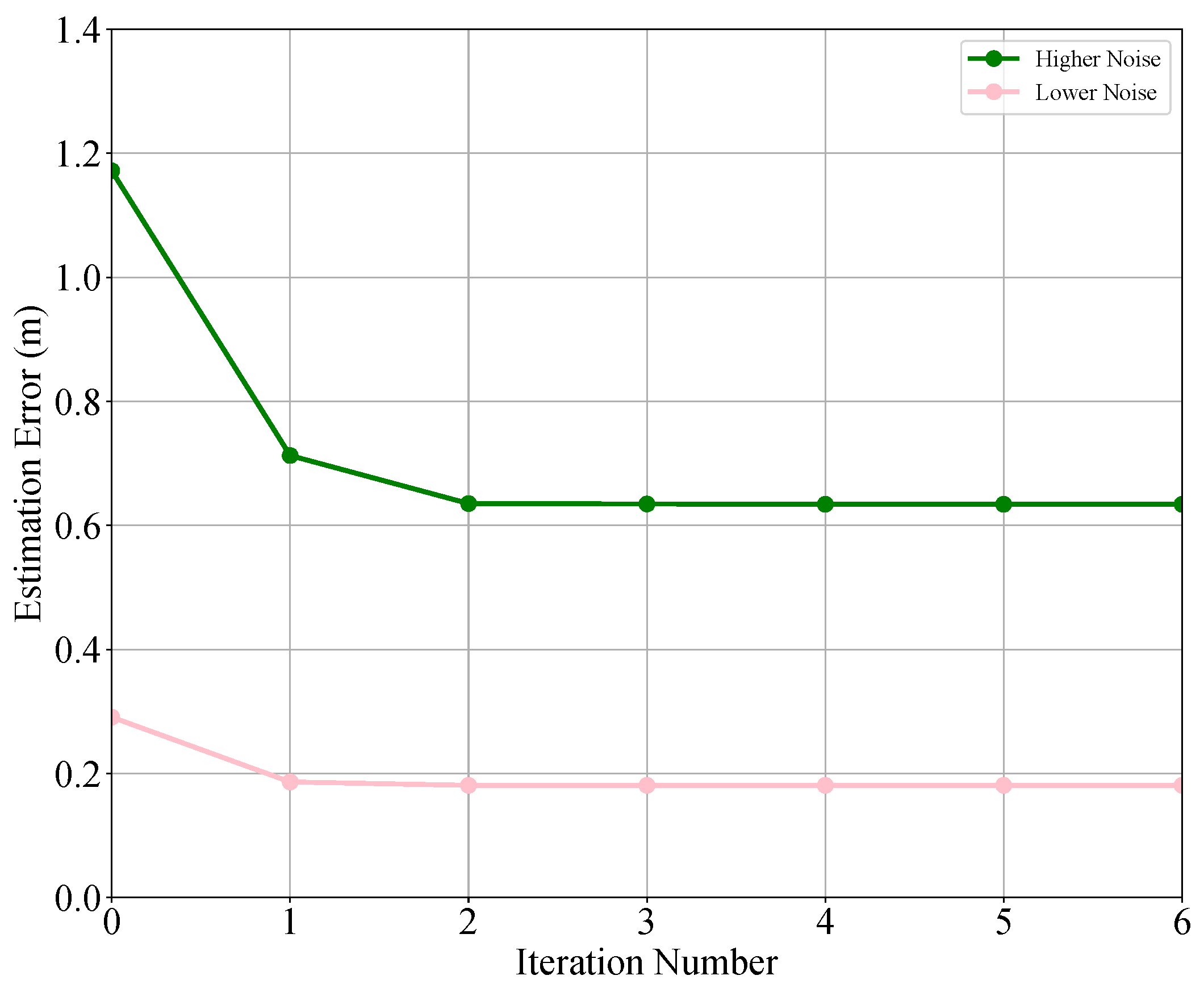
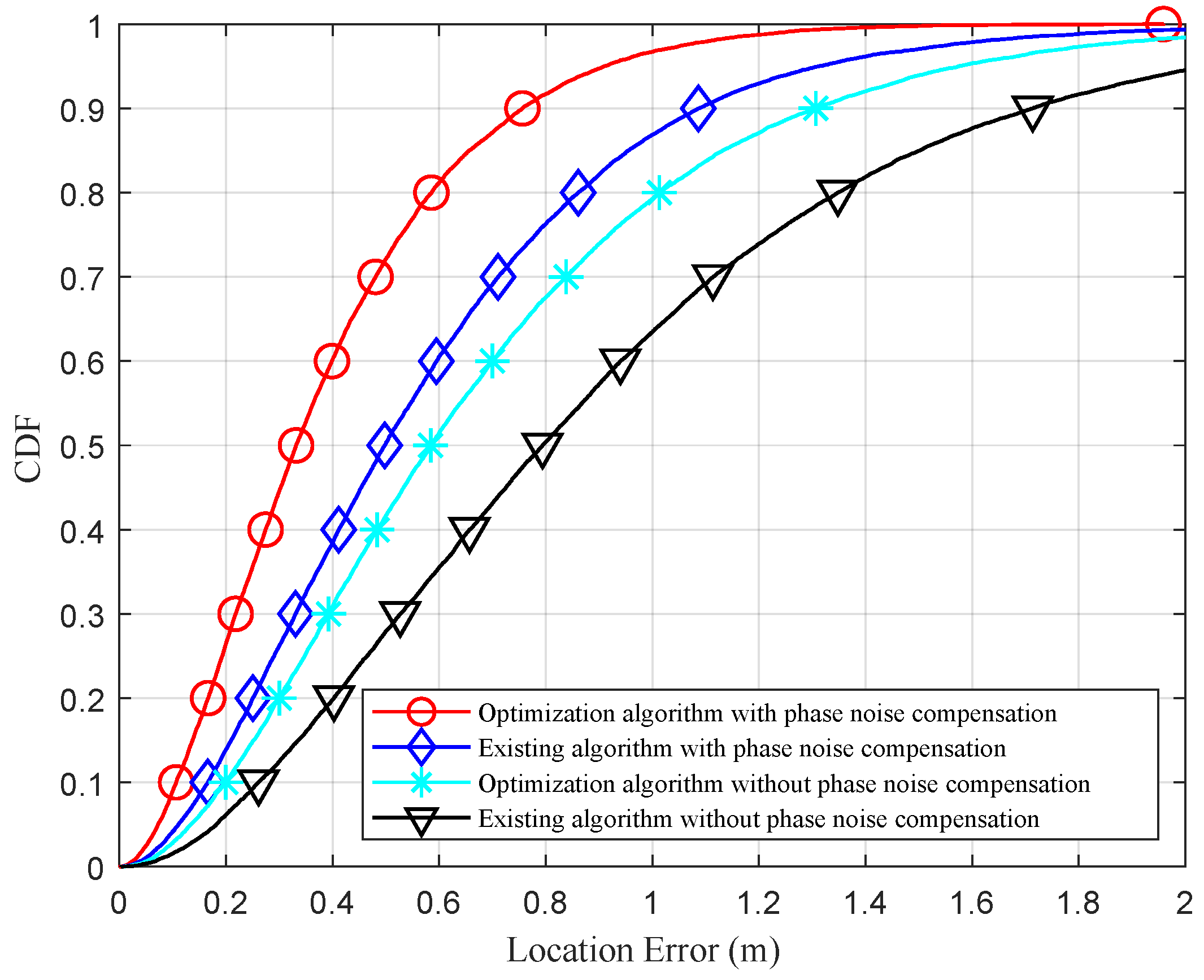
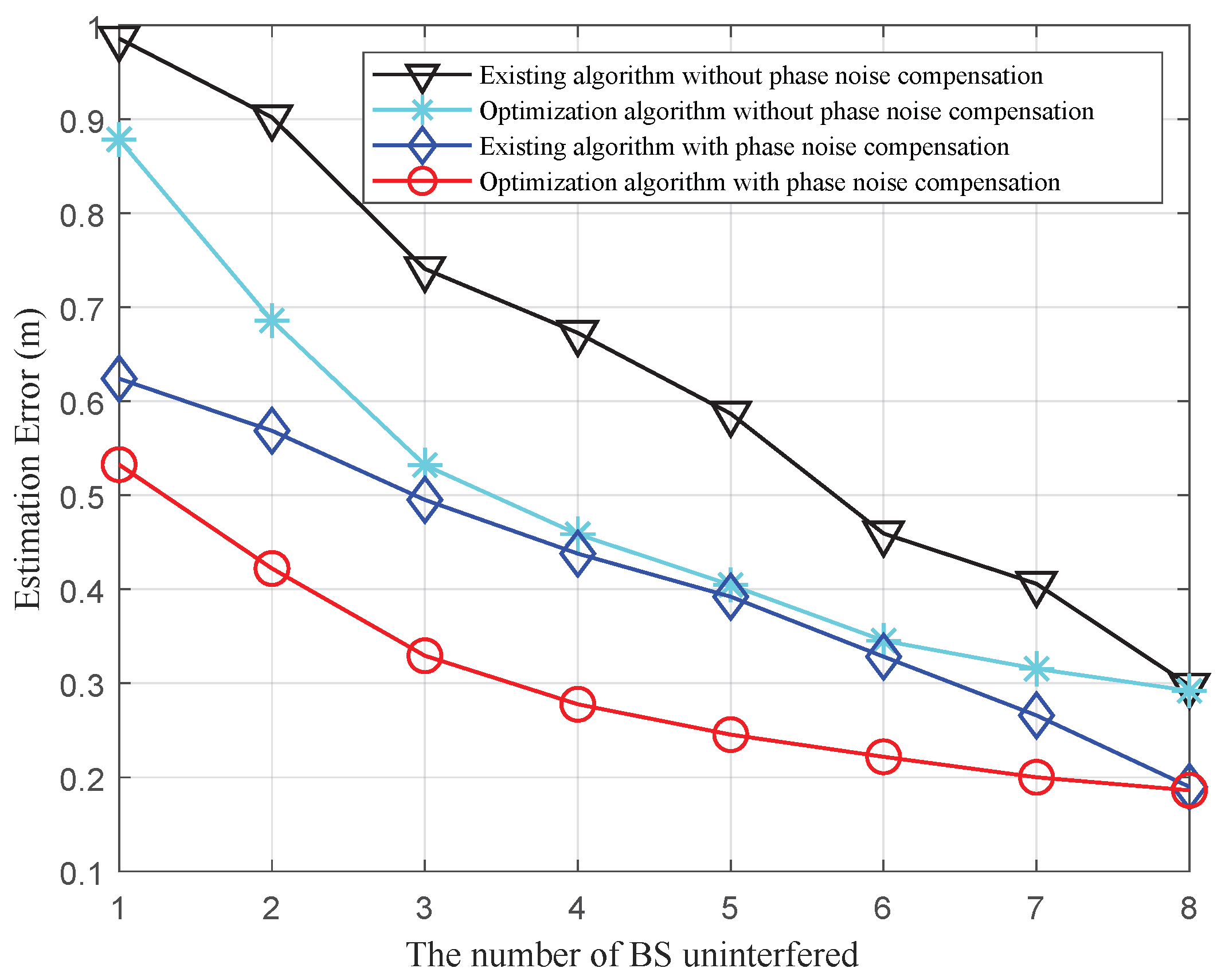
4.2. Performance of Localization Algorithm
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, T.; Xu, W.; Du, W.; Zhou, T.; Huang, Y.; Hu, H. When Statistical Signal Transmission Meets Nonorthogonal Multiple Access: A Potential Solution for Industrial Internet of Things. IEEE Internet Things J. 2024, 11, 33459–33476. [Google Scholar] [CrossRef]
- Zhuang, Y.; Zhang, C.; Huai, J.; Li, Y.; Chen, L.; Chen, R. Bluetooth Localization Technology: Principles, Applications, and Future Trends. IEEE Internet Things J. 2022, 9, 23506–23524. [Google Scholar] [CrossRef]
- Saloni, S.; Hegde, A. WiFi-aware as a connectivity solution for IoT pairing IoT with WiFi aware technology: Enabling new proximity based services. In Proceedings of the 2016 International Conference on Internet of Things and Applications (IOTA), Pune, India, 22–24 January 2016; pp. 137–142. [Google Scholar]
- Trichias, K.; Kaloxylos, A.; Willcock, C. 6G Global Landscape: A Comparative Analysis of 6G Targets and Technological Trends. In Proceedings of the 2024 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Antwerp, Belgium, 3–6 June 2024; pp. 1–6. [Google Scholar]
- Feng, K.; Zhou, T.; Xu, T.; Chen, X.; Hu, H.; Wu, C. Reconfigurable Intelligent Surface-Assisted Multisatellite Cooperative Downlink Beamforming. IEEE Internet Things J. 2024, 11, 23222–23235. [Google Scholar] [CrossRef]
- Peng, P.; Xu, T.; Chen, X.; Zarakovitis, C.C.; Wu, C. Blocked Job Offloading Based Computing Resources Sharing in LEO Satellite Networks. IEEE Internet Things J. 2024. [Google Scholar] [CrossRef]
- Sun, Y.; Finnerty, P.; Ohta, C. BLE-Based Outdoor Localization With Two-Ray Ground-Reflection Model Using Optimization Algorithms. IEEE Access 2024, 12, 45164–45175. [Google Scholar] [CrossRef]
- Al-Bawri, S.S.; Shabiul Islam, M.; Wong, H.Y.; Lee, L.; Islam, M.T. Sub-6 GHz 5G Multilayer Base Station Antenna for Outdoor Localization Technique. In Proceedings of the 2019 IEEE Conference on Sustainable Utilization and Development in Engineering and Technologies (CSUDET), Penang, Malaysia, 7–9 November 2019; pp. 257–260. [Google Scholar]
- Farej, Z.K.; Ismail, A.N. On the Location Accuracy of the Multi-Antenna GPS. In Proceedings of the 2023 International Conference on Engineering, Science and Advanced Technology (ICESAT), Mosul, Iraq, 21–22 June 2023; pp. 29–33. [Google Scholar]
- Dittler, T.; Tschorsch, F.; Dietzel, S.; Scheuermann, B. ANOTEL: Cellular Networks with Location Privacy. In Proceedings of the 2016 IEEE 41st Conference on Local Computer Networks (LCN), Dubai, United Arab Emirates, 7–10 November 2016; pp. 635–638. [Google Scholar]
- Hwang, S.s.; Shin, S.; Pyun, J.y.; Lee, C.G. AoA Estimation Algorithm Based on Composite and Null Despreaders for Multiple GPS Signals. In Proceedings of the 2018 52nd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 28–31 October 2018; pp. 1157–1162. [Google Scholar]
- Liu, Y.; Yang, Z. Location, Localization, and Localizability—Location-Awareness Technology for Wireless Networks, 2nd ed.; Springer: Singapore, 2024. [Google Scholar]
- Yu, T.; Zhuang, C.; Zhang, Z.; Zhou, W. Joint DOA and TOA Estimation for Multipath OFDM Signals Based on Gram Matrix. In Proceedings of the 2021 7th International Conference on Computer and Communications (ICCC), Chengdu, China, 10–13 December 2021; pp. 479–484. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Zhi, K.; Pan, C.; Ren, H.; Chai, K.K.; Elkashlan, M. Active RIS Versus Passive RIS: Which is Superior With the Same Power Budget? IEEE Commun. Lett. 2022, 26, 1150–1154. [Google Scholar] [CrossRef]
- Zhi, K.; Pan, C.; Ren, H.; Wang, K. Power Scaling Law Analysis and Phase Shift Optimization of RIS-Aided Massive MIMO Systems With Statistical CSI. IEEE Trans. Commun. 2022, 70, 3558–3574. [Google Scholar] [CrossRef]
- Wei, C.; Xu, K.; Shen, Z.; Xia, X.; Li, C.; Xie, W.; Zhang, D.; Liang, H. Fingerprint-Based Localization and Channel Estimation Integration for Cell-Free Massive MIMO IoT Systems. IEEE Internet Things J. 2022, 9, 25237–25252. [Google Scholar] [CrossRef]
- Wang, Y.; Ho, D.K.C. Unified Near-Field and Far-Field Localization for AoA and Hybrid AoA-TDoA Positionings. IEEE Trans. Wirel. Commun. 2018, 17, 1242–1254. [Google Scholar] [CrossRef]
- Rogel, N.; Raphaeli, D.; Bialer, O. Time of Arrival and Angle of Arrival Estimation Algorithm in Dense Multipath. IEEE Trans. Signal Process. 2021, 69, 5907–5919. [Google Scholar] [CrossRef]
- Hsieh, P.C.; Chen, F.C. A New Spatial Correlation Formulation of Arbitrary AoA Scenarios. IEEE Antennas Wirel. Propag. Lett. 2009, 8, 398–401. [Google Scholar] [CrossRef]
- Qiu, X.; Wang, B.; Wang, J.; Shen, Y. AoA-Based BLE Localization with Carrier Frequency Offset Mitigation. In Proceedings of the ICC Workshops, Dublin, Ireland, 7–11 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–5. [Google Scholar]
- Henault, S.; Jackson, B.R.; Antar, Y.M.M. Compensation of Time-Division Multiplexing Distortion in Switched Antenna Arrays With a Single RF Front-End and Digitizer. IEEE Trans. Antennas Propag. 2013, 61, 4383–4388. [Google Scholar] [CrossRef]
- Mohammadian, A.; Tellambura, C. RF Impairments in Wireless Transceivers: Phase Noise, CFO, and IQ Imbalance—A Survey. IEEE Access 2021, 9, 111718–111791. [Google Scholar] [CrossRef]
- Ghozlan, H.; Kramer, G. Models and Information Rates for Wiener Phase Noise Channels. IEEE Trans. Inf. Theory 2017, 63, 2376–2393. [Google Scholar] [CrossRef]
- Salim, O.H.; Nasir, A.A.; Mehrpouyan, H.; Xiang, W.; Durrani, S.; Kennedy, R.A. Channel, Phase Noise, and Frequency Offset in OFDM Systems: Joint Estimation, Data Detection, and Hybrid Cramér-Rao Lower Bound. IEEE Trans. Commun. 2014, 62, 3311–3325. [Google Scholar] [CrossRef]
- Sanguinetti, L.; Morelli, M.; Imbarlina, G. An EM-based frequency offset estimator for OFDM systems with unknown interference. IEEE Trans. Wirel. Commun. 2009, 8, 4470–4475. [Google Scholar] [CrossRef]
- Jiang, N.; Zhang, N. Expectation Maximization-Based Target Localization From Range Measurements in Multiplicative Noise Environments. IEEE Commun. Lett. 2021, 25, 1524–1528. [Google Scholar] [CrossRef]
- Xiao, D.; Hu, S.; Kang, K.; Qian, H. An Improved AoA Estimation Algorithm for BLE System in the Presence of Phase Noise. IEEE Trans. Consum. Electron. 2023, 69, 400–407. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DoA Estimation Algorithms | Computational Complexity |
|---|---|
| EM–MUSIC | |
| Capon | |
| MUSIC | |
| ESPRIT |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Cao, Y.; Zarakovitis, C.C.; Xiao, D.; Ying, K.; Chen, X. Localization Optimization Algorithm Based on Phase Noise Compensation. Electronics 2024, 13, 4947. https://doi.org/10.3390/electronics13244947
Liu Y, Cao Y, Zarakovitis CC, Xiao D, Ying K, Chen X. Localization Optimization Algorithm Based on Phase Noise Compensation. Electronics. 2024; 13(24):4947. https://doi.org/10.3390/electronics13244947
Chicago/Turabian StyleLiu, Yanming, Yingkai Cao, Charilaos C. Zarakovitis, Disheng Xiao, Kai Ying, and Xianfu Chen. 2024. "Localization Optimization Algorithm Based on Phase Noise Compensation" Electronics 13, no. 24: 4947. https://doi.org/10.3390/electronics13244947
APA StyleLiu, Y., Cao, Y., Zarakovitis, C. C., Xiao, D., Ying, K., & Chen, X. (2024). Localization Optimization Algorithm Based on Phase Noise Compensation. Electronics, 13(24), 4947. https://doi.org/10.3390/electronics13244947