
Multifunctional Superconducting Magnetic Energy Compensation for the Traction Power System of High-Speed Maglevs




Abstract
:1. Introduction
- (1)
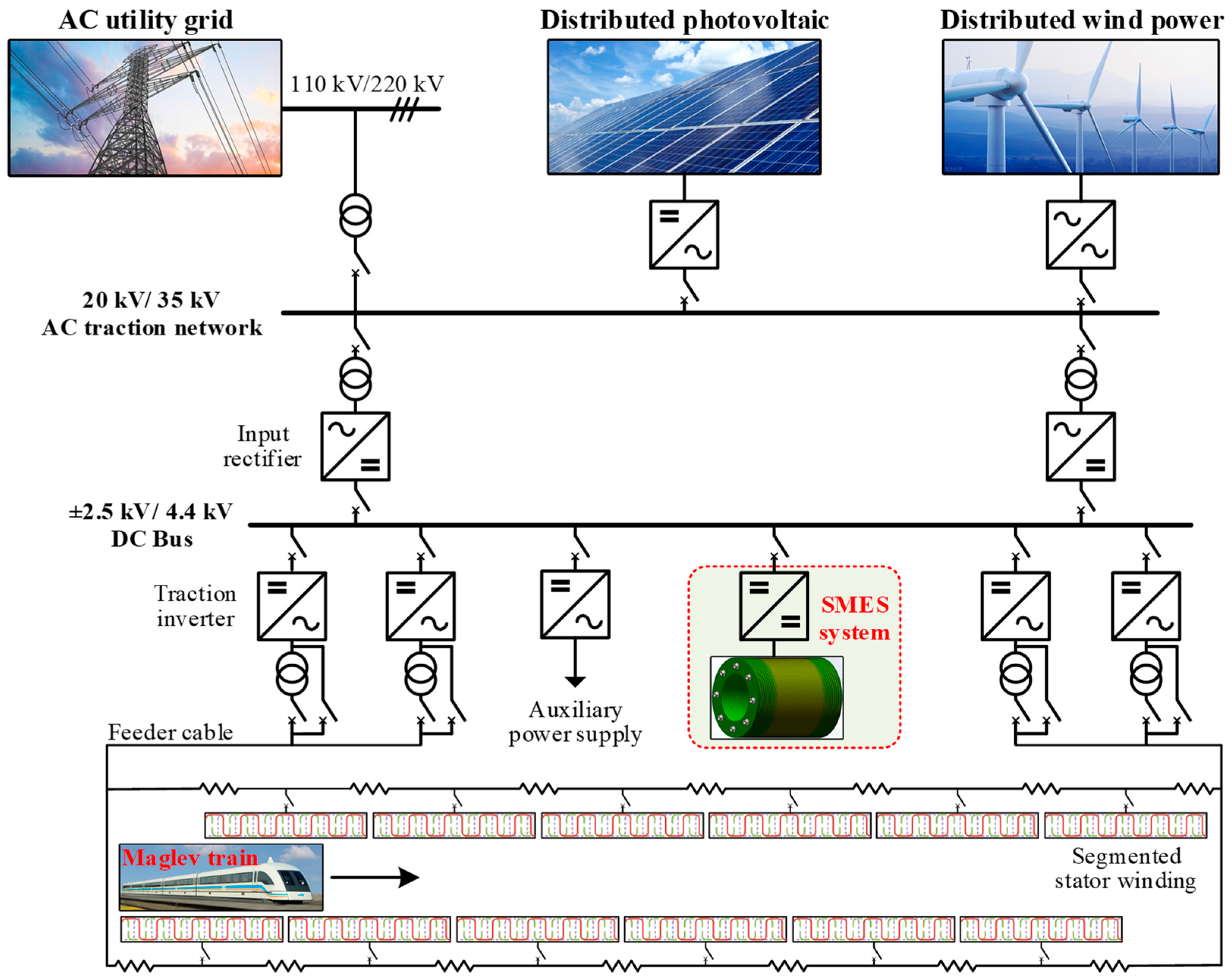
- A novel scheme for a high-speed maglev integrated with distributed renewable energy and SMES systems was proposed. Distributed renewable energy sources can provide low-carbon power for high-speed maglev trains. The SMES system can solve the power quality problem of the traction power system and achieves a smooth transition during the transient switching between different working conditions.
- (2)
- A new multifunctional SMES compensation system was proposed. A power–voltage double-loop control strategy and a superconducting energy-storage magnet parameter design method were proposed to achieve the rapid compensation of high-speed maglev acceleration and regenerative braking, maintain voltage stability of the DC bus and traction network, and improve power supply quality and reliability.
2. Scheme of High-Speed Maglev Power System Using Superconducting Magnetic Energy Storage and Distributed Renewable Energy
3. Principle of SMES Power Compensation
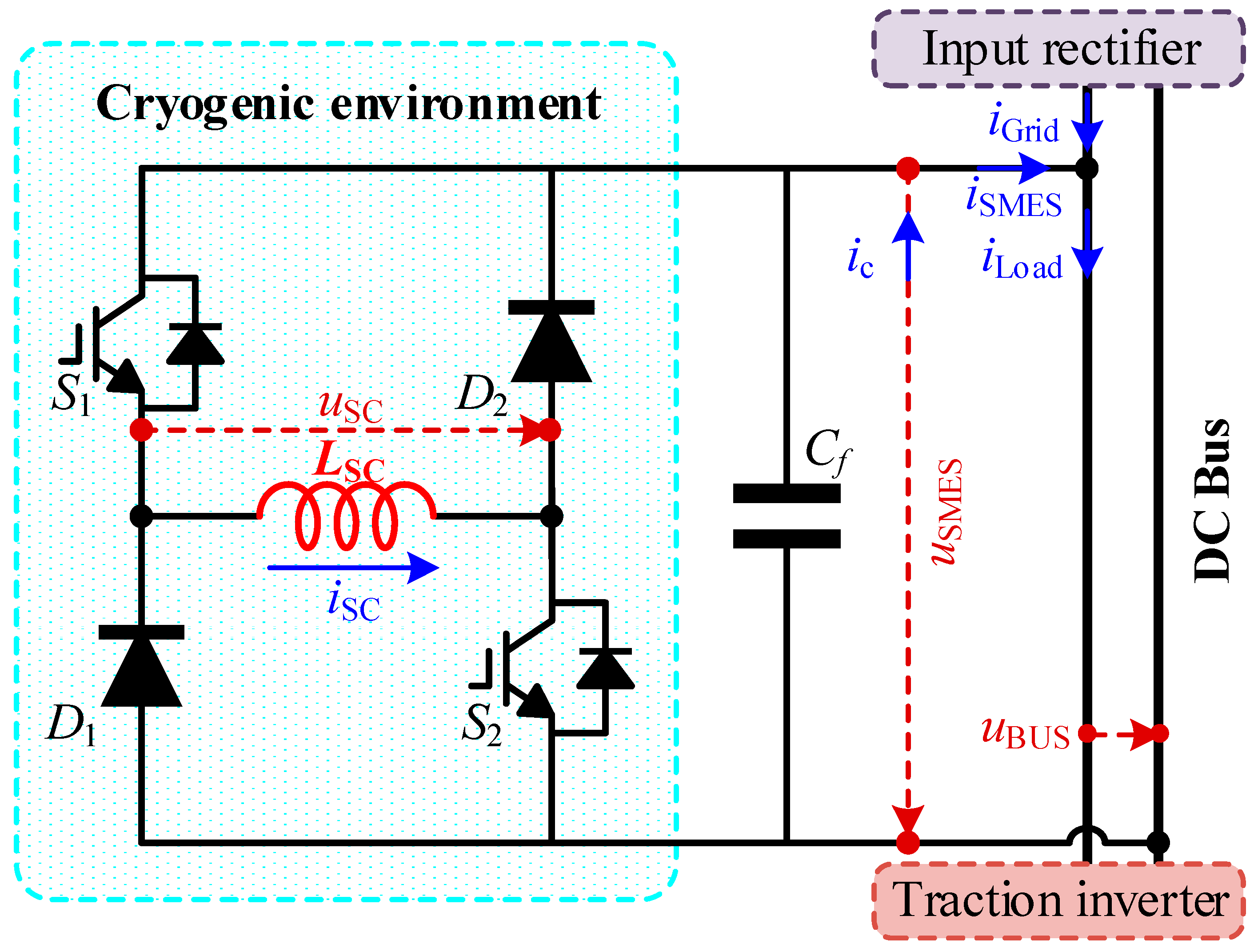
3.1. Topology and Operating Principle
3.2. Control Strategy
3.3. SMES Capacity Estimation
4. Case Study and Analysis
4.1. Case Configuration
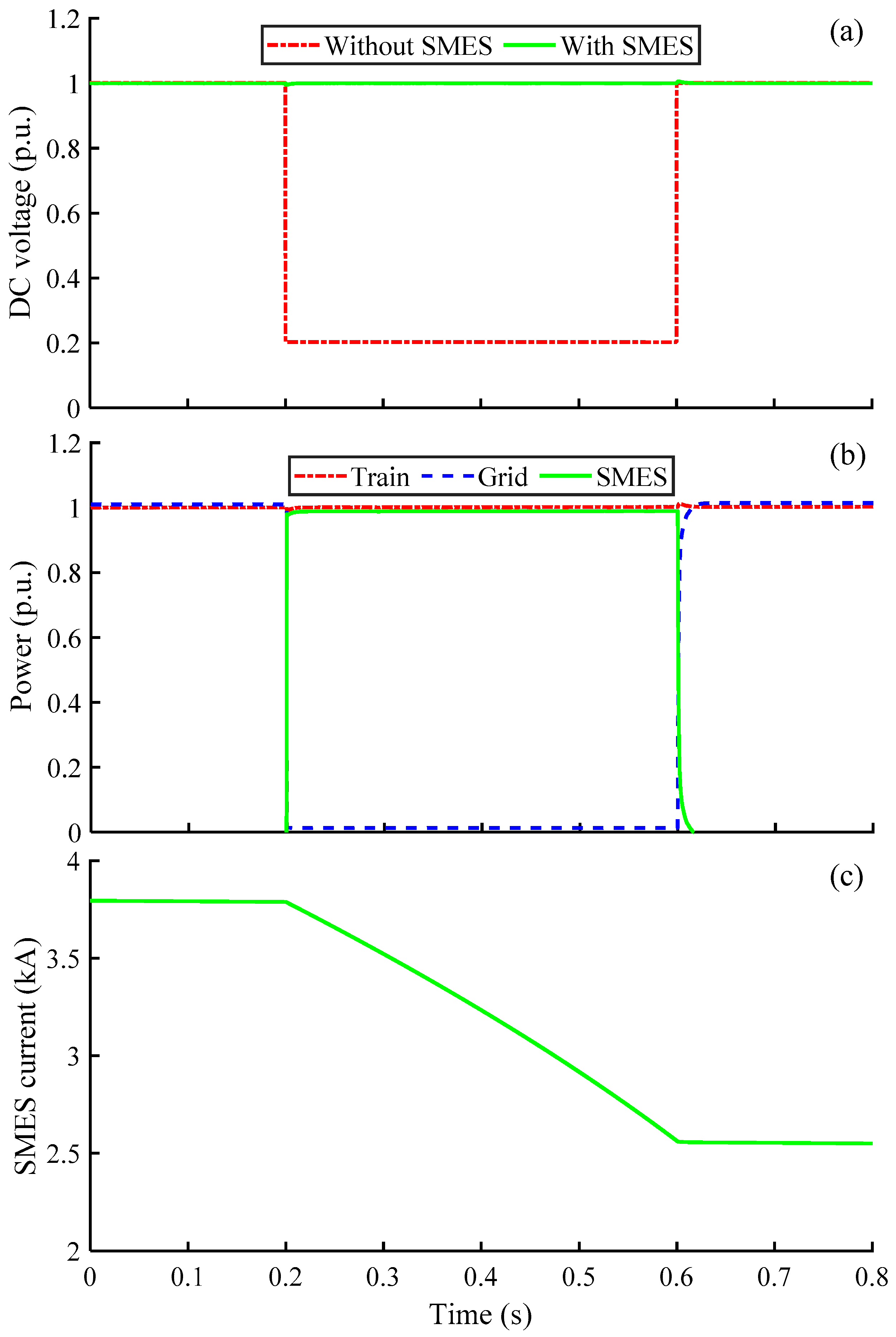
4.2. Voltage Sags
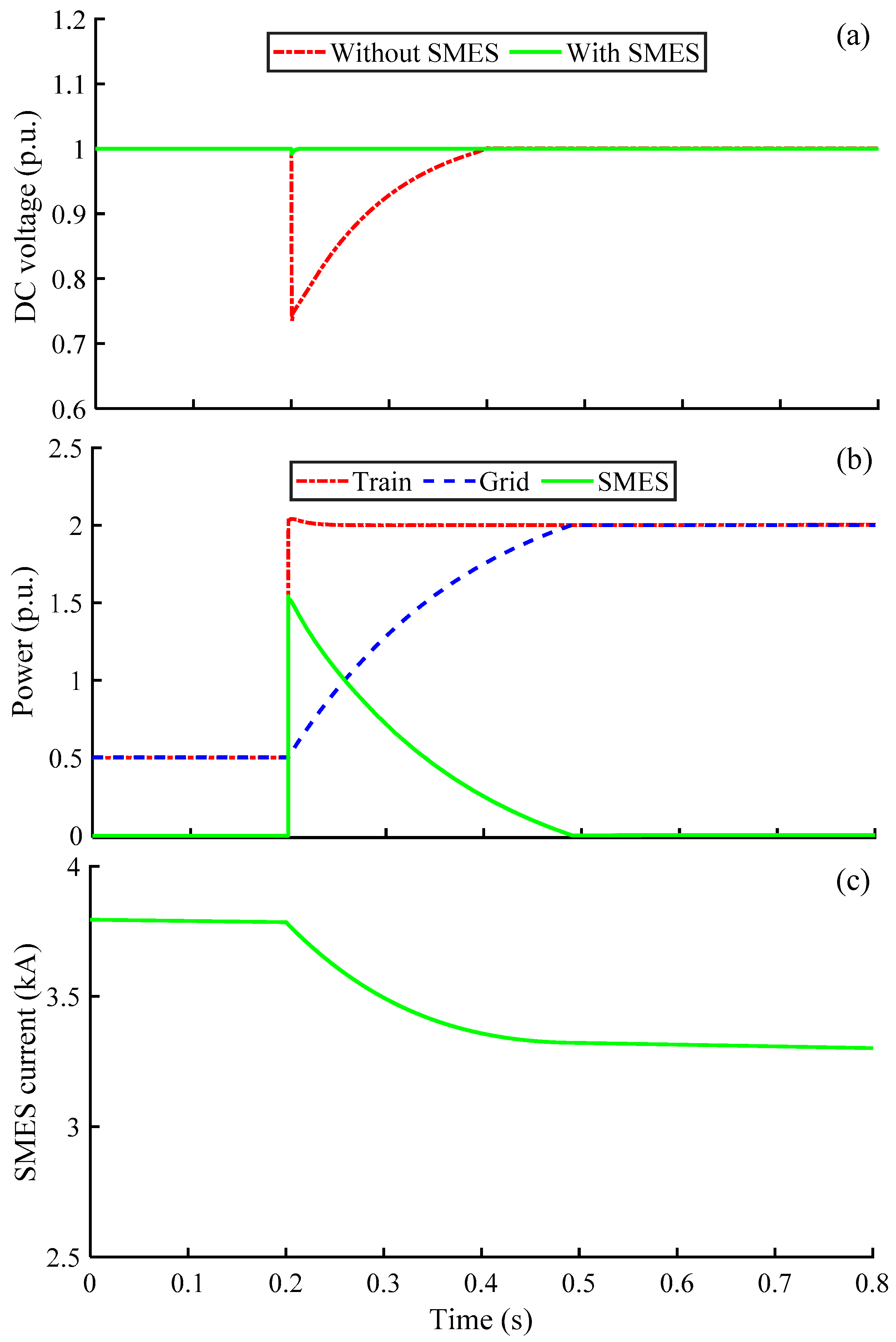
4.3. Train Acceleration
4.4. Regenerative Braking
5. Conclusions
- (1)
- A new scheme for the maglev traction power system: local distributed renewable sources were used to provide low-carbon energy for maglevs, thereby reducing the power consumption from the utility grid, and the SMES system was integrated to improve the overall power quality.
- (2)
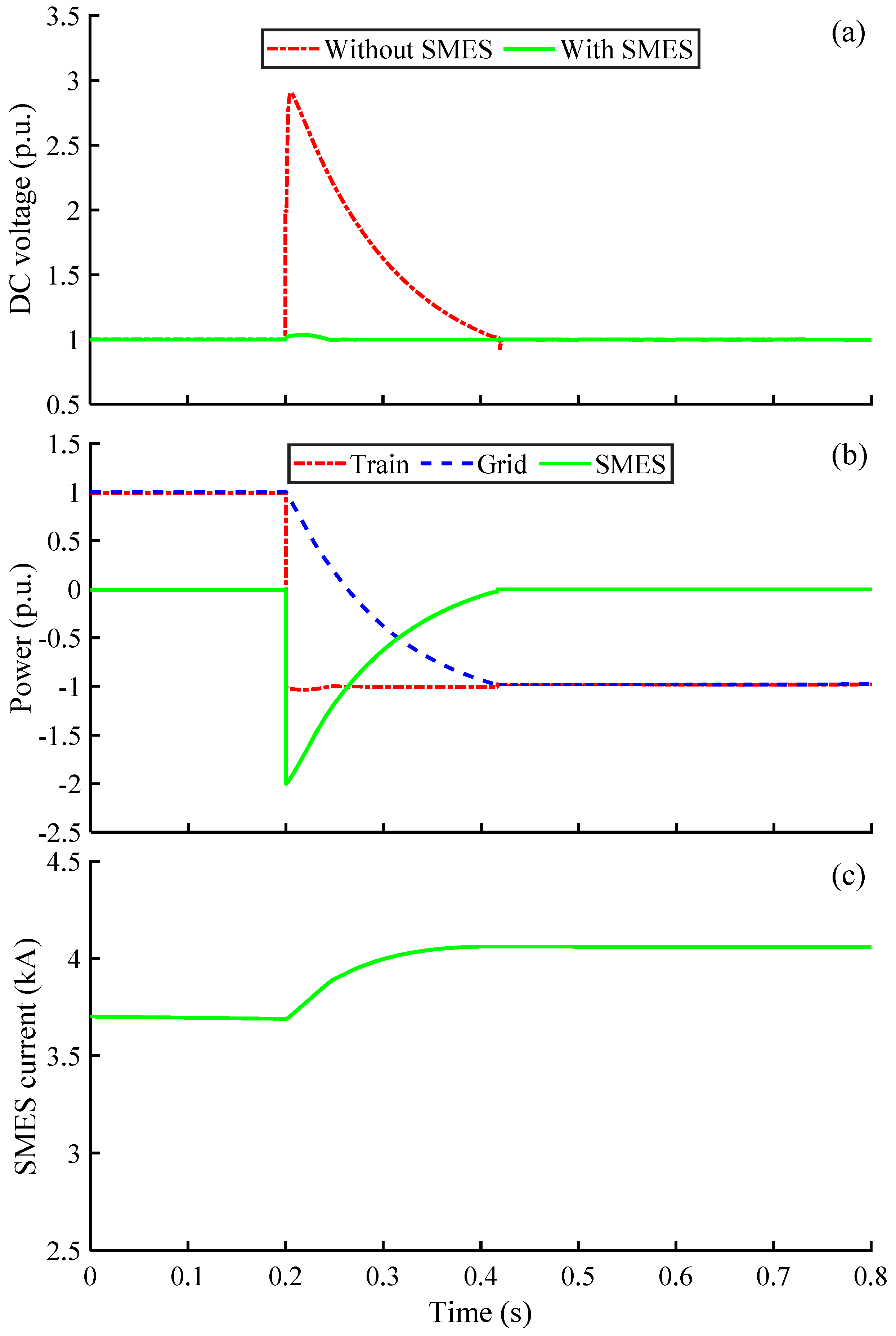
- Improvement in the power quality of maglevs: the SMES system provided rapid compensation for the traction power system, addressing the voltage sags caused by the integration of fluctuating renewable energy sources into the traction power system, ensuring high-quality power supply for the maglevs. When a voltage sag with a depth of 80% occurred in the 10 MW traction power system, the SMES system quickly stabilized the DC bus voltage within 10 ms, with voltage fluctuations of less than 0.6%.
- (3)
- The smooth transition of interactive energy flow between the traction power system and the maglev: By using the proposed power–voltage dual-loop control, SMES can actively respond to the power demand of maglev trains during acceleration and braking conditions by rapidly releasing and absorbing energy, avoiding transient power impacts on the traction grid, and achieving smooth regenerative braking. During the transient process of maglev acceleration, the SMES system quickly responded to the output of a sudden increase of 15 MW power required for train acceleration within 10 ms, and stabilized the DC bus with fluctuations of less than 0.8%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviations | |
| AC | alternating current |
| DC | direct current |
| DFIG | doubly fed induction generator |
| DVR | dynamic voltage restorer |
| KCL | Kirchhoff’s current law |
| KVL | Kirchhoff’s voltage law |
| SMES | superconducting magnetic energy storage |
| Nomenclature | |
| a | static power increment factor |
| b | dynamic power increment factor |
| D | duty cycle ratio of the power electronic switch |
| ESC | storage energy of the superconducting magnet |
| ISC | operation current of the superconducting magnet |
| iSC | superconducting magnet current |
| iSC | superconducting magnet operating current |
| ISC_max | maximum operating current of superconducting magnets |
| ISC_min | minimum operating current of superconducting magnets |
| ISC0 | steady-state operating current of the superconducting magnet |
| iSMES | SMES output compensation current |
| k(t) | coefficient of the power increment at different compensated moments |
| Pcomp. | maximum compensation power preset by the SMES system |
| PGrid | real-time power transmission of the traction grid |
| PSMES | compensation circuit output power |
| PSMES_ref | compensation power reference value |
| PTrain_set | set acceleration or braking power of the train |
| Rl | compensation circuit line internal resistance |
| t0 | initial moment of accelerating or braking of the maglev train |
| ta | transient working time of the compensated circuit |
| te | artificially designed superconducting energy storage power compensation duration |
| TSW | cycle time of the power electronic switch |
| uD | diode conduction voltage drop |
| uSC | superconducting magnet voltage |
| uSMES | SMES output compensation voltage |
| ΔD | duty cycle deviation |
| ΔESC | minimum energy required to satisfy the compensation of voltage sags |
| ΔESC2 | minimum energy required to satisfy the compensation of maglev train acceleration |
| ΔESC3 | maximum energy absorbed during the braking of the maglev train |
| ΔP | base power increment |
| ΔPSMES | power deviation |
| Δt | time interval for updating the calculation of the reference value of the compensated power |
| ΔuSMES | voltage deviation |
| ρ | ratio coefficient between the compensation power and the rated power of the DC bus |
References
- Li, F.; Sun, Y.; Xu, J.; He, Z.; Lin, G. Control methods for levitation system of EMS-type maglev vehicles: An overview. Energies 2023, 16, 2995. [Google Scholar] [CrossRef]
- Beauloye, L.; Dehez, B. Permanent Magnet Electrodynamic Suspensions Applied to MAGLEV Transportation Systems: A Review. IEEE Trans. Transp. Electrif. 2023, 9, 748–758. [Google Scholar] [CrossRef]
- Zuo, J.; Dong, L.; Yang, F.; Guo, Z.; Wang, T.; Zuo, L. Energy harvesting solutions for railway transportation: A comprehensive review. Renew. Energy 2023, 202, 56–87. [Google Scholar] [CrossRef]
- Mitrofanov, S.V.; Kiryanova, N.G.; Gorlova, A.M. Stationary hybrid renewable energy systems for railway electrification: A review. Energies 2021, 14, 5946. [Google Scholar] [CrossRef]
- Teng, J.; Li, L.; Jiang, Y.; Shi, R. A review of clean energy exploitation for railway transportation systems and its enlightenment to China. Sustainability 2022, 14, 10740. [Google Scholar] [CrossRef]
- Chen, Y.; Fu, L.; Chen, X.; Jiang, S.; Chen, X.; Xu, J.; Shen, B. Ultra-low electrical loss superconducting cables for railway transportation: Technical, economic, and environmental analysis. J. Clean. Prod. 2024, 445, 141310. [Google Scholar] [CrossRef]
- Shavolkin, O.; Shvedchykova, I.; Gerlici, J.; Kravchenko, K.; Pribilinec, F. Use of hybrid photovoltaic systems with a storage battery for the remote objects of railway transport infrastructure. Energies 2022, 15, 4883. [Google Scholar] [CrossRef]
- Zhong, Z.; Zhang, Y.; Shen, H.; Li, X. Optimal planning of distributed photovoltaic generation for the traction power supply system of high-speed railway. J. Clean. Prod. 2020, 263, 121394. [Google Scholar] [CrossRef]
- Kim, H.; Ku, J.; Kim, S.-M.; Park, H.-D. A new GIS-based algorithm to estimate photovoltaic potential of solar train: Case study in Gyeongbu line, Korea. Renew. Energy 2022, 190, 713–729. [Google Scholar] [CrossRef]
- Jia, L.; Ma, J.; Cheng, P.; Liu, Y. A perspective on solar energy-powered road and rail transportation in China. CSEE J. Power Energy Syst. 2020, 6, 760–771. [Google Scholar] [CrossRef]
- Chen, X.; Pang, Z.; Zhang, M.; Jiang, S.; Feng, J.; Shen, B. Techno-economic study of a 100-MW-class multi-energy vehicle charging/refueling station: Using 100% renewable, liquid hydrogen, and superconductor technologies. Energy Convers. Manag. 2023, 276, 116463. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, M.; Qi, L.; Wei, W.; Yu, Z.; Wei, W.; Yu, X.; Yan, J. Using existing infrastructures of high-speed railways for photovoltaic electricity generation. Resour. Conserv. Recycl. 2021, 178, 106091. [Google Scholar] [CrossRef]
- Li, X.; Zhu, C.; Liu, Y. Traction power supply system of China high-speed railway under low-carbon target: Form evolution and operation control. Electr. Power Syst. Res. 2023, 223, 109682. [Google Scholar] [CrossRef]
- Ding, F.; Yang, J.; Zhou, Z. Economic profits and carbon reduction potential of photovoltaic power generation for China’s high-speed railway infrastructure. Renew. Sustain. Energy Rev. 2023, 178, 113272. [Google Scholar] [CrossRef]
- Wang, H.; Yi, M.; Zeng, X.; Zhang, T.; Luo, D.; Zhang, Z. A hybrid, self-adapting drag-lift conversion wind energy harvesting system for railway turnout monitoring on the Tibetan Plateau. Sustain. Energy Technol. Assess. 2021, 46, 101262. [Google Scholar] [CrossRef]
- Belay Kebede, A.; Worku, G.B. A research on regenerative braking energy recovery: A case of addis ababa light rail transit. eTransportation 2021, 8, 100117. [Google Scholar] [CrossRef]
- Böhm, M.; Fernández Del Rey, A.; Pagenkopf, J.; Varela, M.; Herwartz-Polster, S.; Nieto Calderón, B. Review and comparison of worldwide hydrogen activities in the rail sector with special focus on on-board storage and refueling technologies. Int. J. Hydrogen Energy 2022, 47, 38003–38017. [Google Scholar] [CrossRef]
- Cheng, P.; Kong, H.; Ma, J.; Jia, L. Overview of resilient traction power supply systems in railways with interconnected microgrid. CSEE J. Power Energy Syst. 2021, 7, 1122–1132. [Google Scholar] [CrossRef]
- BADE, S.; Kulkarni, V. Analysis of railway traction power system using renewable energy: A review. In Proceedings of the 2018 International Conference on Computation of Power, Energy, Information and Communication (ICCPEIC), Chennai, India, 28–29 March 2018. [Google Scholar] [CrossRef]
- Dong, H.; Tian, Z.; Spencer, J.; Fletcher, D.; Hajiabady, S. Coordinated control strategy of railway multisource traction system with energy storage and renewable energy. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15702–15713. [Google Scholar] [CrossRef]
- Chen, X.; Yue, J.; Fu, L.; Zhang, M.; Tang, M.; Feng, J.; Shen, B. Green hydrogen production and liquefaction using offshore wind power, liquid air, and LNG cold energy. J. Clean. Prod. 2023, 423, 138653. [Google Scholar] [CrossRef]
- Li, M.; Zheng, J.; Sheng, J.; Cheng, Y.; Hong, Z.; Ye, H.; Wang, X.; Liu, X.; Liu, H. Research on a novel HTS double pancake coil based on CORC: Used for kA-level SMES of accelerator. Supercond. Sci. Technol. 2022, 35, 125001. [Google Scholar] [CrossRef]
- Chen, X.; Xie, Q.; Bian, X.; Shen, B. Energy-saving superconducting magnetic energy storage (SMES) based interline DC dynamic voltage restorer. CSEE J. Power Energy Syst. 2022, 8, 238–248. [Google Scholar] [CrossRef]
- Jiao, F.; Tang, Y.; Xi, T.; Zhou, S.; Ge, T.; He, Q.; Ren, L.; He, J.; Li, J. Electromagnetic and thermal design of a conduction-cooling 150 kJ/100 kW hybrid SMES system. IEEE Trans. Appl. Supercond. 2012, 23, 5701404. [Google Scholar] [CrossRef]
- Xu, Y.; Tang, Y.; Ren, L.; Shi, J.; Li, J.; Song, M.; Cao, K.; Wang, D.; He, J.; Zhang, R.; et al. Numerical simulation of coupled heat transfer, stress, and electromagnetic properties in an SMES magnet. IEEE Trans. Appl. Supercond. 2013, 24, 4901005. [Google Scholar] [CrossRef]
- Noguchi, S.; Inaba, Y.; Igarashi, H. An optimal configuration design method for HTS-SMES coils taking account of thermal and electromagnetic characteristics. IEEE Trans. Appl. Supercond. 2008, 18, 762–765. [Google Scholar] [CrossRef]
- Zhang, J.; Dai, S.; Wang, Z.; Zhang, D.; Song, N.; Gao, Z.; Zhang, F.; Xu, X.; Zhu, Z.; Zhang, G.; et al. The electromagnetic analysis and structural design of a 1 MJ HTS magnet for SMES. IEEE Trans. Appl. Supercond. 2011, 21, 1344–1347. [Google Scholar] [CrossRef]
- Kumar, A.; Jeyan, J.M.L.; Agarwal, A. Electromagnetic analysis on 2.5 MJ high temperature superconducting magnetic energy storage (SMES) coil to be used in uninterruptible power applications. Mater. Today Proc. 2020, 21, 1755–1762. [Google Scholar] [CrossRef]
- Xu, Y.; Ren, L.; Zhang, Z.; Tang, Y.; Shi, J.; Xu, C.; Li, J.; Pu, D.; Wang, Z.; Liu, H.; et al. Analysis of the loss and thermal characteristics of a SMES (Superconducting Magnetic Energy Storage) magnet with three practical operating conditions. Energy 2018, 143, 372–384. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, Y.; Gao, Y.; Yang, Z.; Li, Z.; Pi, W. Mechanical characterization of a 10-MJ HTS SMES magnet wound by quasi-isotropic strands and directly stacked tape conductors. Superconductivity 2023, 5, 100042. [Google Scholar] [CrossRef]
- Ali, M.H.; Wu, B.; Dougal, R.A. An overview of smes applications in power and energy systems. IEEE Trans. Sustain. Energy 2010, 1, 38–47. [Google Scholar] [CrossRef]
- Papageorgiou, P.G.; Oureilidis, K.O.; Christoforidis, G.C. A systematic review of hybrid superconducting magnetic/battery energy storage systems: Applications, control strategies, benefits, limitations and future prospects. Renew. Sustain. Energy Rev. 2023, 183, 113436. [Google Scholar] [CrossRef]
- Yang, R.; Jin, J.; Zhou, Q.; Mu, S.; Abu-Siada, A. Superconducting magnetic energy storage based DC unified power quality conditioner with advanced dual control for DC-DFIG. J. Mod. Power Syst. Clean Energy 2022, 10, 1385–1400. [Google Scholar] [CrossRef]
- Babu, V.; Ahmed, K.S.; Shuaib, Y.M.; Manikandan, M. Power quality enhancement using dynamic voltage restorer (DVR)-based predictive space vector transformation (PSVT) with proportional resonant (PR)-controller. IEEE Access 2021, 9, 155380–155392. [Google Scholar] [CrossRef]
- Suzuki, S.; Baba, J.; Shutoh, K.; Masada, E. Effective application of superconducting magnetic energy storage (SMES) to load leveling for high speed transportation system. IEEE Trans. Appl. Supercond. 2004, 14, 713–716. [Google Scholar] [CrossRef]
- Zou, Z.; Zheng, M.; Lu, Q. Modeling and simulation of traction power supply system for high-speed maglev train. World Electr. Veh. J. 2022, 13, 82. [Google Scholar] [CrossRef]
- Cui, G.; Luo, L.; Liang, C.; Hu, S.; Li, Y.; Cao, Y.; Xie, B.; Xu, J.; Zhang, Z.; Liu, Y.; et al. Supercapacitor Integrated Railway Static Power Conditioner for Regenerative Braking Energy Recycling and Power Quality Improvement of High-Speed Railway System. IEEE Trans. Transp. Electrif. 2019, 5, 702–714. [Google Scholar] [CrossRef]
- Kaleybar, H.J.; Brenna, M.; Foiadelli, F.; Fazel, S.S.; Zaninelli, D. Power Quality Phenomena in Electric Railway Power Supply Systems: An Exhaustive Framework and Classification. Energies 2020, 13, 6662. [Google Scholar] [CrossRef]
- Gui, H.; Chen, R.; Niu, J.; Zhang, Z.; Tolbert, L.M.; Wang, F.; Blalock, B.J.; Costinett, D.; Choi, B.B. Review of power electronics components at cryogenic temperatures. IEEE Trans. Power Electron. 2020, 35, 5144–5156. [Google Scholar] [CrossRef] [PubMed]
- Chen, R.; Wang, F.F. SiC and GaN devices with cryogenic cooling. IEEE Open J. Power Electron. 2021, 2, 315–326. [Google Scholar] [CrossRef]
- Chen, X.Y.; Chen, Y.; Fu, L.; Zhang, Z.Y.; Tang, M.G.; Feng, J.; Jiang, S.; Lei, Y.; Zhang, D.H.; Shen, B.Y. Photovoltaic-driven liquid air energy storage system for combined cooling, heating and power towards zero-energy buildings. Energy Convers. Manag. 2024, 299, 117959. [Google Scholar] [CrossRef]
- Gui, H.; Zhang, Z.; Chen, R.; Ren, R.; Niu, J.; Li, H.; Dong, Z.; Timms, C.; Wang, F.; Tolbert, L.M.; et al. Development of high-power high switching frequency cryogenically cooled inverter for aircraft applications. IEEE Trans. Power Electron. 2020, 35, 5670–5682. [Google Scholar] [CrossRef]
- Janic, M. Estimation of direct energy consumption and CO2 emission by high speed rail, transrapid maglev and hyperloop passenger transport systems. Int. J. Sustain. Transp. 2021, 15, 696–717. [Google Scholar] [CrossRef]
- Fritz, E.; Eckert, F.; Blow, L.; Kircher, R.; Witt, M. Energy consumption of track-based high-speed trains: Maglev systems in comparison with wheel-rail systems. Transp. Syst. Technol. 2018, 4, 134–155. [Google Scholar] [CrossRef]
- Chen, X.; Pang, Z.; Gou, H.; Xie, Q.; Zhao, R.; Shi, Z.; Shen, B. Intelligent design of large-size HTS magnets for SMES and high-field applications: Using a self-programmed GUI tool. Supercond. Sci. Technol. 2021, 34, 095008. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, M.; Jiang, S.; Gou, H.; Zhou, P.; Yang, R.; Shen, B. Energy reliability enhancement of a data center/wind hybrid DC network using superconducting magnetic energy storage. Energy 2023, 263, 125622. [Google Scholar] [CrossRef]
- Ceraolo, M.; Lutzemberger, G.; Meli, E.; Pugi, L.; Rindi, A.; Pancari, G. Energy storage systems to exploit regenerative braking in DC railway systems: Different approaches to improve efficiency of modern high-speed trains. J. Energy Storage 2018, 16, 269–279. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title 1 | Parameters | Value |
|---|---|---|
| Traction network | Voltage | 35 kV |
| DC bus voltage | 4.4 kV (1.0 p.u.) | |
| Maglev train [43,44] | Carriages per vehicle/train | 6 |
| Gross (total) mass | 382–399 tons | |
| Capacity | 472–696 seats | |
| Typical average cruising speed | 430 km/h | |
| Low-speed power | 5 MW (0.5 p.u.) | |
| High-speed cruising power | 10 MW (1.0 p.u.) | |
| Acceleration power | 20 MW (2.0 p.u.) | |
| SMES system | Inductance | 1.028 H |
| Energy storage | 10.4 MJ | |
| Critical current | 4.5 kA | |
| Operating current | 3.8 kA | |
| Converter power | 4.4 kV/25 MW |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, L.; Chen, Y.; Zhang, M.; Chen, X.; Shen, B. Multifunctional Superconducting Magnetic Energy Compensation for the Traction Power System of High-Speed Maglevs. Electronics 2024, 13, 979. https://doi.org/10.3390/electronics13050979
Fu L, Chen Y, Zhang M, Chen X, Shen B. Multifunctional Superconducting Magnetic Energy Compensation for the Traction Power System of High-Speed Maglevs. Electronics. 2024; 13(5):979. https://doi.org/10.3390/electronics13050979
Chicago/Turabian StyleFu, Lin, Yu Chen, Mingshun Zhang, Xiaoyuan Chen, and Boyang Shen. 2024. "Multifunctional Superconducting Magnetic Energy Compensation for the Traction Power System of High-Speed Maglevs" Electronics 13, no. 5: 979. https://doi.org/10.3390/electronics13050979
APA StyleFu, L., Chen, Y., Zhang, M., Chen, X., & Shen, B. (2024). Multifunctional Superconducting Magnetic Energy Compensation for the Traction Power System of High-Speed Maglevs. Electronics, 13(5), 979. https://doi.org/10.3390/electronics13050979