
Enhancing Safety in IoT Systems: A Model-Based Assessment of a Smart Irrigation System Using Fault Tree Analysis

Abstract
:1. Introduction
2. Applications of IoT in Smart Agriculture
2.1. Smart Irrigation System
2.2. Pest Control and Plant Disease Monitoring
2.3. Use of Drones and Harvesting Robots
2.4. Vertical Farming and Smart Greenhouse
2.5. Tracking and Monitoring Livestock
2.6. Effects of Sensor-Based IoT Device Failures in Smart Agriculture
3. Overview of Manual Failure Analysis Methods
3.1. Failure Mode and Effects Analysis
3.2. Bayesian Network
3.3. Markov Analysis Model
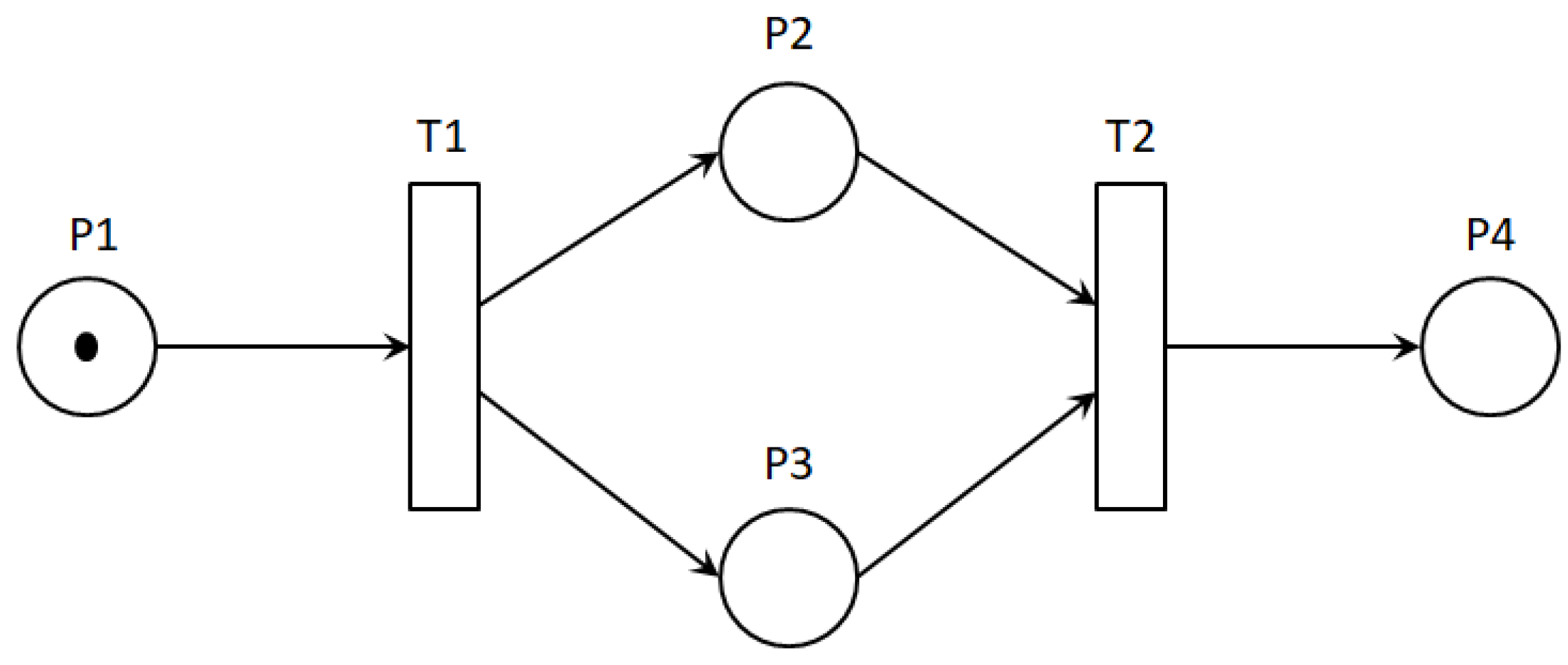
3.4. Petri Net
- is a finite set of places: Places represent states or conditions within the system. They are typically depicted as circles or ovals in a PN diagram.
- is a finite set of transitions: Transitions represent events or actions that can occur within the system. These are typically depicted as rectangles in the diagram. Transitions cause changes in the system’s state by consuming tokens from input places and producing tokens in output places.
- is a finite set of arcs: Arcs (also known as edges) connect from places to transitions or transitions to places, indicating the flow of tokens between them. There are two types of arcs: Input Arcs and Output Arcs.
- is a finite set of tokens: Tokens are small symbols or markers. Each place can hold a certain number of tokens, representing the presence or availability of resources, objects, or entities. They can move between places through transitions, following the defined flow of arcs.
3.5. Fault Tree Analysis
4. Model-Based Approach in Safety Analysis of IoT
4.1. The Unified Modelling Language
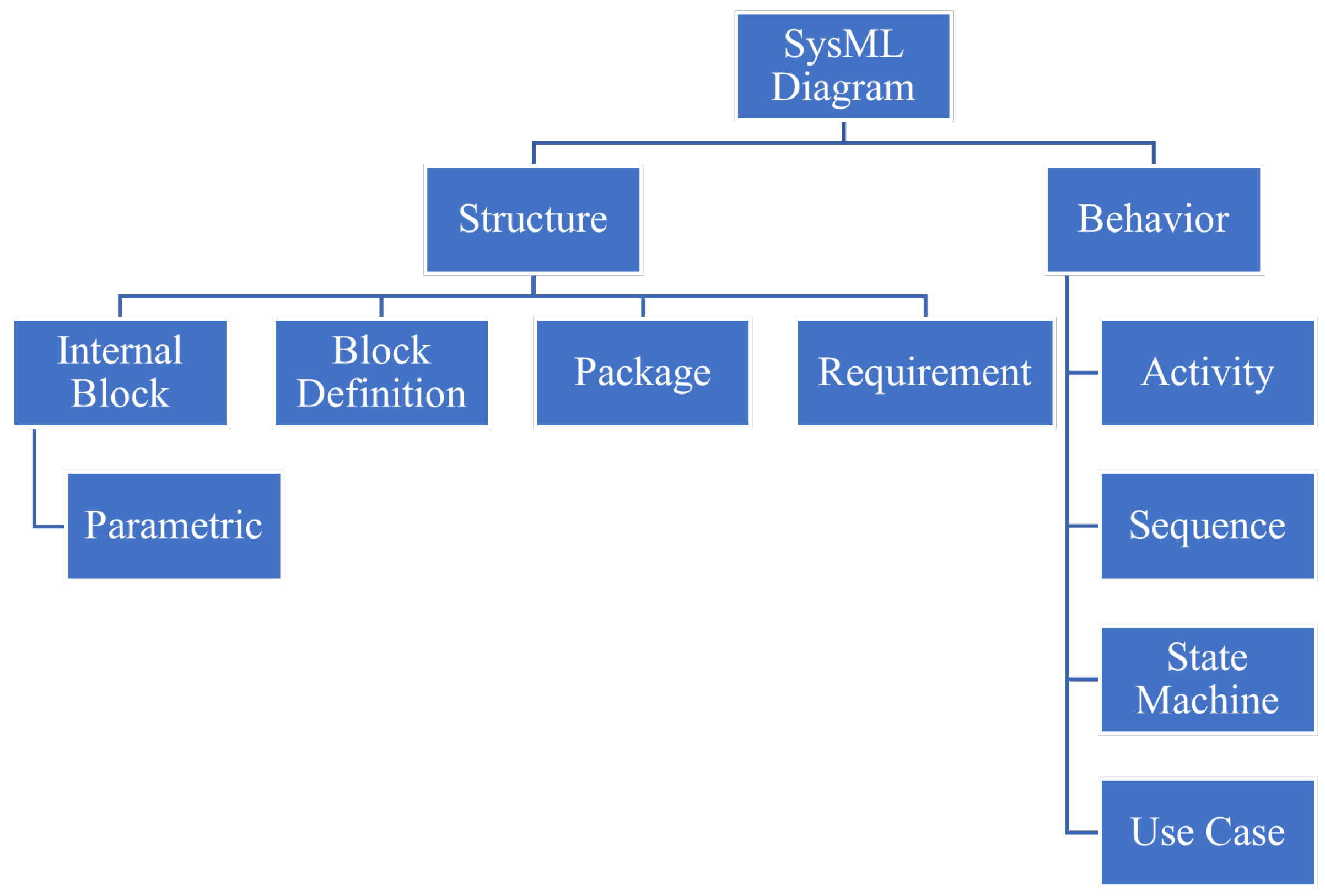
4.2. System Modelling Language
5. Proposed Safety Analysis Approach
5.1. Static System Modelling
5.2. Functional Configuration Modelling
5.3. Failure Annotation
5.4. Component Fault Tree Generation
5.5. System Fault Tree Generation
6. Illustrative Example
6.1. Static System Modelling
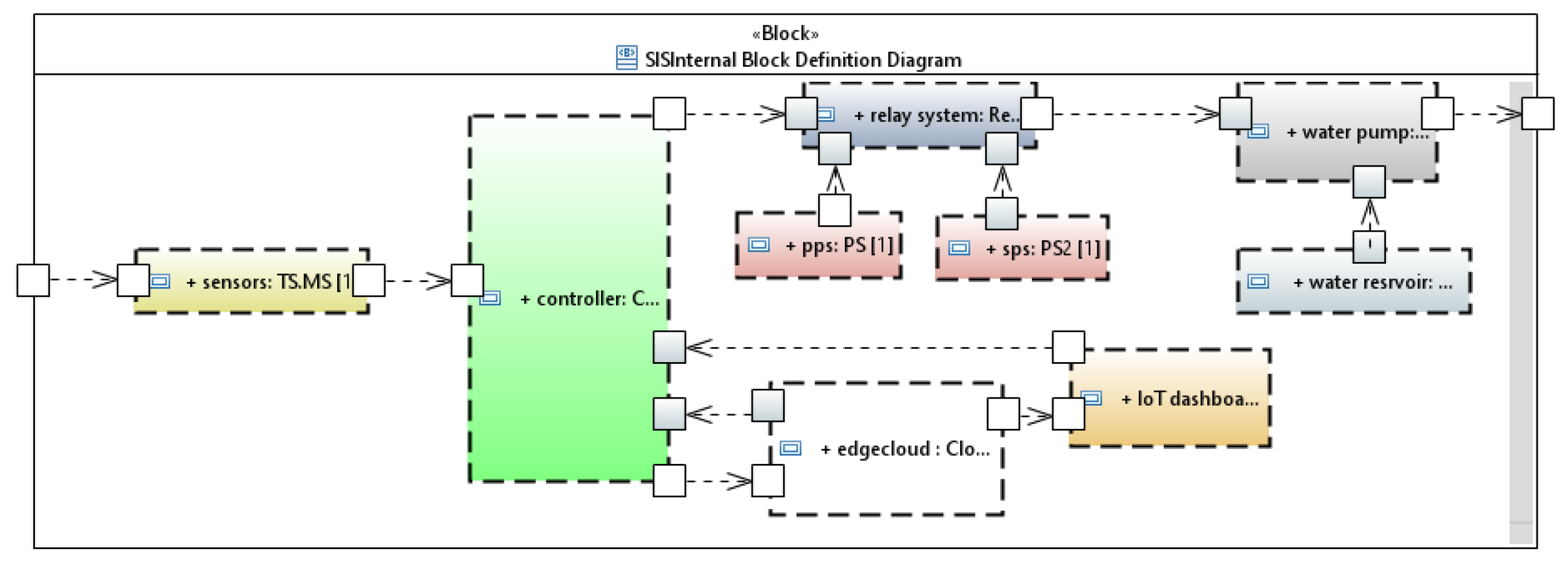
6.2. Internal Configuration System Modelling
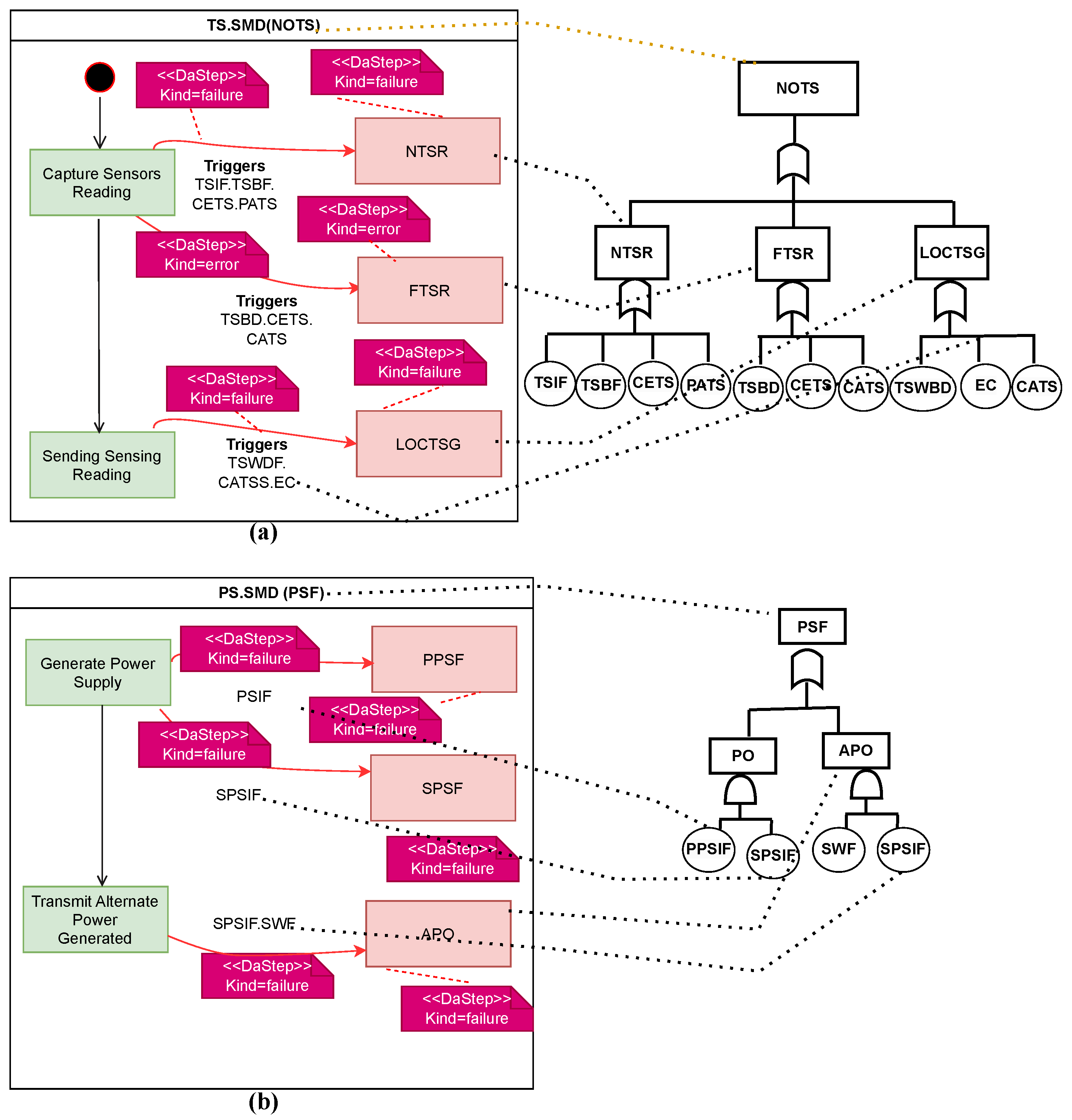
6.3. Failure Annotation Modelling of the System
6.4. Model Transformation from MBSE Model to FT
6.4.1. Component Fault Tree Generation
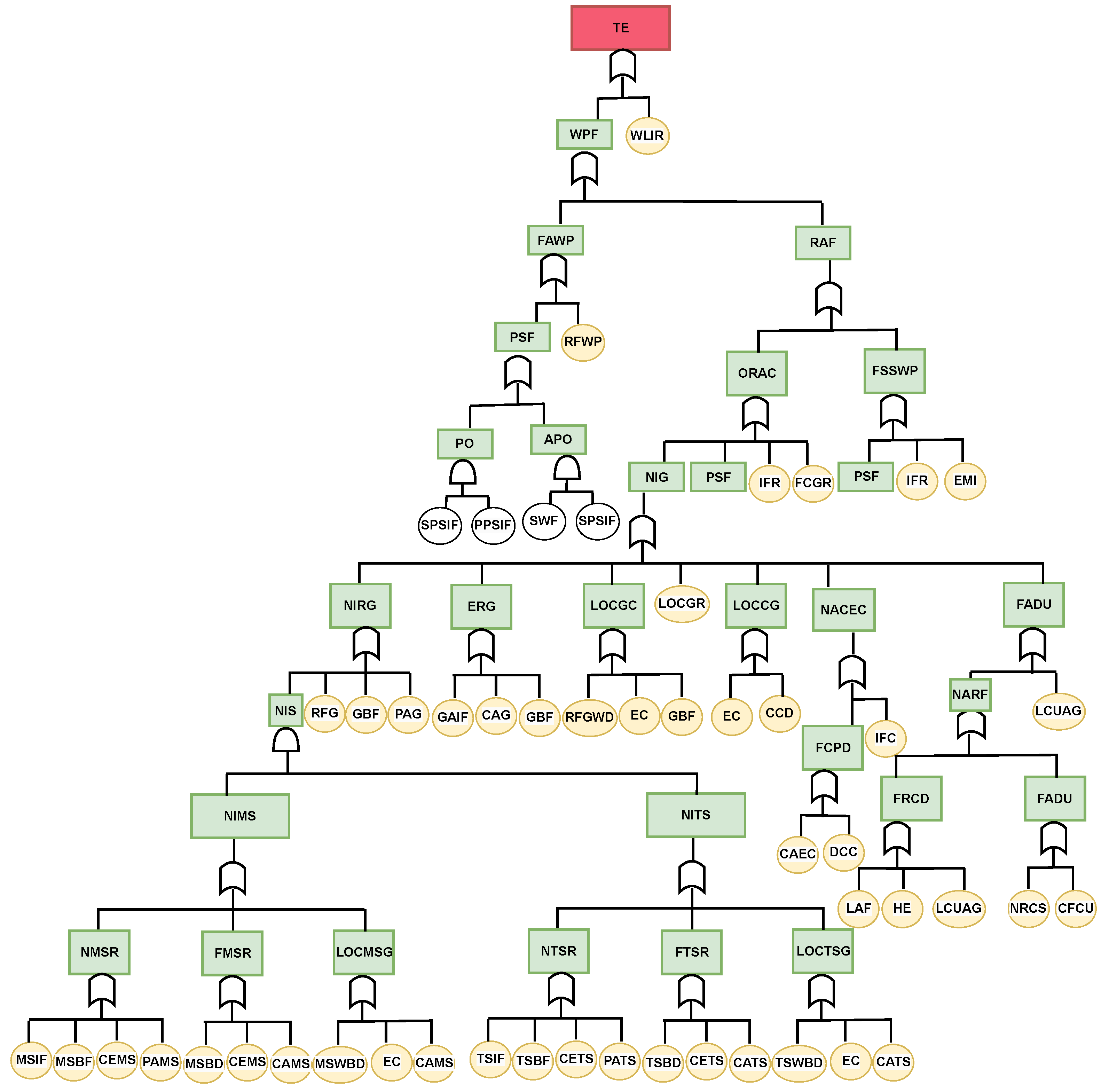
6.4.2. System Fault Tree Generation
6.5. Qualitative Failure Analysis of the System
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Data Associated with the Fault Tree of Figure

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Description |
|---|---|
| TE | Failure of the Irrigation System |
| TS | Temperature Sensor |
| MS | Moisture Sensor |
| UA | User IoT Mobile Application |
| SG | Smart Gateway |
| EC | Edge Cloud Server |
| WR | Water Reservoir |
| RS | Relay System |
| PS | Power Source |
| WP | Water Pump |
| NOMS | No Output (or Wrong Reading) from MS |
| NOTS | No Output (or Wrong Reading) from TS |
| NARF | No action is recommended by the farmer |
| NOG | No Output from the Smart Gateway |
| NODC | No Output Data by the Cloud |
| FSWF | Failure to Supply Water to the Farm |
| RAF | Relay Activation Failure |
| PSF | Power Supply Failure |
| WPF | Water Pump Failure |
| NTSR | No Reading from Temperature Sensor |
| FTSR | False Reading from Temperature Sensor |
| LOCTSG | Loss of Communication Temperature Sensor to Gateway |
| NMSR | No Reading from Moisture Sensor |
| FMSR | False Reading from Moisture Sensor |
| LOCMSG | Loss of Communication Moisture Sensor to Gateway |
| TSIF | Temperature Sensor Internal Failure |
| TSBF | Temperature Sensor Battery Failure |
| CETS | Calibration Error Temperature Sensor |
| CATS | Cyberattack on Temperature Sensor |
| TSBD | Temperature Sensor Battery Depletion (Low Battery) |
| TSWDF | Temperature Sensor Wireless Device Failure |
| CATSS | Cyberattack on Temperature Sensor sent Signal |
| EC | Environment Condition |
| MSIF | Moisture Sensor Internal Failure |
| MSBF | Moisture Sensor Battery Failure |
| CEMS | Calibration Error Moisture Sensor |
| CAMS | Cyberattack on Moisture Sensor |
| MSBD | Moisture Sensor Battery Depletion (Low Battery) |
| MSWDF | Moisture Sensor Wireless Device Failure |
| CAMSS | Cyberattack on Moisture Sensor sent Signal |
| FRCD | Failure to Receive Cloud Data |
| NRCS | No Command Received by the IoT Gateway from the Edge Cloud Server |
| LAF | Lack of Action by the Farmer |
| HE | Human Error |
| LCUAG | Loss of Communication User Application to Gateway |
| NIRG | No Sensing Input Received by the Gateway |
| ERG | Erroneous Reading from the Gateway |
| LOCGC | Loss of Communication Gateway to Cloud |
| LOCCG | Loss of Communication Cloud to Gateway |
| FADU | Failure to Accept Actuation Data From the User |
| LOCGR | Loss of Communication Gateway to Relay System |
| NITS | No Input from Temperature Sensor |
| NIMS | No Input from Moisture Sensor |
| RFG | Random Failure of Gateway |
| GBF | Gateway Battery Failure |
| PAG | Physical Attack on Gateway |
| GIF | Gateway Internal Failure (Hardware Failure) |
| CAG | Cyberattack on Gateway Node |
| GAIF | Gateway Application Internal Failure (Runtime Error) |
| GBF | Gateway Battery Failure |
| RFGWD | Random Failure Gateway Wireless Device |
| CCD | Corrupted Cloud Data |
| NACEC | No Activation Command from the Cloud |
| LCUAG | Loss of Communication User Application to Gateway |
| LCGRS | Loss of Communication Gateway to Relay System |
| CACD | Cyberattack on Cloud Data |
| LOCGC | Loss of Communication Gateway to Cloud |
| NIRG | No Input Received from the Gateway |
| IFC | Internal Failure of Cloud Server |
| CAEC | Cyberattack on Edge Cloud (DoS) |
| DCC | Data Corruption on the Cloud Server |
| CACPD | Cyberattack on the Cloud Processed Data |
| LOCCG | Loss of Communication Cloud to Gateway |
| NIG | No Input from the Gateway |
| IFR | Internal Failure of Relay |
| PSF | Power System Failure |
| EMI | Electromagnetic Interference on the Relay System |
| PPSIF | Primary Power System Failure |
| SPSIF | Secondary Power System Failure |
| APO | Alternative Power Source Outage |
| RFWP | Random Failure of Water Pump |
| WLIR | Water Level is Inadequate in the Reservoir |
| SWF | Switch Failure |
| NGD | No Data from the Gateway |
References
- Bangladesh Bureau of Statistics (BBS). Agriculture Census 2019: Structure of Agricultural Holdings and Livestock & Fisheries, National Series Volume-1; BBS, Statistics and Informatics Division, Ministry of Planning, Government of the People’s Republic of Bangladesh: Dhaka, Bangladesh, 2022.
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.H.M. Internet-of-Things (IoT)-based smart agriculture: Toward making the fields talk. IEEE Access 2019, 7, 129551–129583. [Google Scholar] [CrossRef]
- Gondchawar, N.; Kawitkar, R. IoT based smart agriculture. Int. J. Adv. Res. Comput. Commun. Eng. 2016, 5, 838–842. [Google Scholar]
- Sushanth, G.; Sujatha, S. IOT based smart agriculture system. In Proceedings of the 2018 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 22–24 March 2018; IEEE: Toulouse, France, 2018; pp. 1–4. [Google Scholar]
- Yang, X.; Shu, L.; Li, K.; Nurellari, E.; Huo, Z.; Zhang, Y. A Lightweight Fault-Detection Scheme for Resource-Constrained Solar Insecticidal Lamp IoTs. Sensors 2023, 23, 6672. [Google Scholar] [CrossRef] [PubMed]
- Shahzadi, R.; Tausif, M.; Ferzund, J.; Suryani, M.A. Internet of things based expert system for smart agriculture. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 341–350. [Google Scholar] [CrossRef]
- Saraf, S.B.; Gawali, D.H. IoT based smart irrigation monitoring and controlling system. In Proceedings of the 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 19–20 May 2017; IEEE: Toulouse, France, 2017; pp. 815–819. [Google Scholar]
- Khanna, A.; Kaur, S. Evolution of Internet of Things (IoT) and its significant impact in the field of Precision Agriculture. Comput. Electron. Agric. 2019, 157, 218–231. [Google Scholar] [CrossRef]
- Huang, K.; Shu, L.; Li, K.; Chen, Y.; Zhu, Y.; Valluru, R. Sustainable and Intelligent Phytoprotection in Photovoltaic Agriculture: New Challenges and Opportunities. Electronics 2023, 12, 1221. [Google Scholar] [CrossRef]
- Ferrag, M.A.; Shu, L.; Yang, X.; Derhab, A.; Maglaras, L. Security and privacy for green IoT-based agriculture: Review, blockchain solutions, and challenges. IEEE Access 2020, 8, 32031–32053. [Google Scholar] [CrossRef]
- Yang, X.; Shu, L.; Liu, Y.; Hancke, G.P.; Ferrag, M.A.; Huang, K. Physical security and safety of IoT equipment: A survey of recent advances and opportunities. IEEE Trans. Ind. Inform. 2022, 18, 4319–4330. [Google Scholar] [CrossRef]
- Abdulhamid, A.; Kabir, S.; Ghafir, I.; Lei, C. Dependability of the Internet of Things: Current Status and Challenges. In Proceedings of the 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Maldives, Maldives, 16–18 November 2022; IEEE: Toulouse, France, 2022; pp. 1–6. [Google Scholar]
- Kabir, S. An overview of fault tree analysis and its application in model based dependability analysis. Expert Syst. Appl. 2017, 77, 114–135. [Google Scholar] [CrossRef]
- Relkar, A.S. Risk analysis of equipment failure through failure mode and effect analysis and fault tree analysis. J. Fail. Anal. Prev. 2021, 21, 793–805. [Google Scholar] [CrossRef]
- Niloofar, P.; Lazarova-Molnar, S. Fusion of data and expert knowledge for fault tree reliability analysis of cyber-physical systems. In Proceedings of the 2021 5th International Conference on System Reliability and Safety (ICSRS), Palermo, Italy, 24–26 November 2021; IEEE: Toulouse, France, 2021; pp. 92–97. [Google Scholar]
- Yang, X.; Shu, L.; Li, K.; Huo, Z.; Shu, S.; Nurellari, E. Silos: An intelligent fault detection scheme for solar insecticidal lamp iot with improved energy efficiency. IEEE Internet Things J. 2022, 10, 920–939. [Google Scholar] [CrossRef]
- Fazlollahtabar, H.; Niaki, S.T.A. Fault tree analysis for reliability evaluation of an advanced complex manufacturing system. J. Adv. Manuf. Syst. 2018, 17, 107–118. [Google Scholar] [CrossRef]
- Kabir, S.; Taleb-Berrouane, M.; Papadopoulos, Y. Dynamic reliability assessment of flare systems by combining fault tree analysis and Bayesian networks. Energy Sources Part A Recover. Util. Environ. Eff. 2023, 45, 4305–4322. [Google Scholar] [CrossRef]
- Abdulhamid, A.; Kabir, S.; Ghafir, I.; Lei, C. Developing Dependable IoT Systems: Safety Perspective. In Proceedings of the UNIfied Conference of DAMAS, IncoME and TEPEN Conferences, Huddersfield, UK, 29 August–1 September 2023; Springer: Cham, Switzerland, 2023; pp. 1–6. [Google Scholar]
- Abdulhamid, A.; Kabir, S.; Ghafir, I.; Lei, C. An Overview of Safety and Security Analysis Frameworks for the Internet of Things. Electronics 2023, 12, 3086. [Google Scholar] [CrossRef]
- Kabir, S.; Papadopoulos, Y.; Walker, M.; Parker, D.; Aizpurua, J.I.; Lampe, J.; Rüde, E. A model-based extension to HiP-HOPS for dynamic fault propagation studies. In Proceedings of the Model-Based Safety and Assessment, Trento, Italy, 11–13 September 2017; Bozzano, M., Papadopoulos, Y., Eds.; Springer: Cham, Switzerland, 2017; pp. 163–178. [Google Scholar]
- Alshboul, B.; Petriu, D.C. Automatic derivation of fault tree models from SysML models for safety analysis. J. Softw. Eng. Appl. 2018, 11, 204–222. [Google Scholar] [CrossRef]
- Feiler, P.; Delange, J. Automated fault tree analysis from aadl models. ACM SIGAda Ada Lett. 2017, 36, 39–46. [Google Scholar] [CrossRef]
- Sebastián, G.; Tesoriero, R.; Gallud, J.A. Automatic code generation for language-learning applications. IEEE Lat. Am. Trans. 2020, 18, 1433–1440. [Google Scholar] [CrossRef]
- Shboul, B.A.; Petriu, D.C. Pattern-based transformation of SysML models into fault tree models. In Proceedings of the 29th Annual International Conference on Computer Science and Software Engineering, Toronto, ON, Canada, 4–6 November 2019; pp. 214–223. [Google Scholar]
- Sharvia, S.; Kabir, S.; Walker, M.; Papadopoulos, Y. Model-based dependability analysis: State-of-the-art, challenges, and future outlook. Softw. Qual. Assur. 2016, 2016, 251–278. [Google Scholar]
- Roudier, Y.; Apvrille, L. SysML-Sec: A model driven approach for designing safe and secure systems. In Proceedings of the 2015 3rd International Conference on Model-Driven Engineering and Software Development (MODELSWARD), Angers, France, 9–11 February 2015; IEEE: Toulouse, France, 2015; pp. 655–664. [Google Scholar]
- de Andrade Melani, A.H.; de Souza, G.F.M. Obtaining fault trees through SysML diagrams: A MBSE approach for reliability analysis. In Proceedings of the 2020 Annual Reliability and Maintainability Symposium (RAMS), Palm Springs, CA, USA, 27–30 January 2020; IEEE: Toulouse, France, 2020; pp. 1–5. [Google Scholar]
- Vyas, P.; Mittal, R. Hazard analysis of Unified Modelling Language sequence and state charts using software fault tree analysis. Int. J. Crit. Comput.-Based Syst. 2013, 4, 173–197. [Google Scholar] [CrossRef]
- Jürjens, J. Developing safety-critical systems with UML. In Proceedings of the «UML» 2003-The Unified Modeling Language. Modeling Languages and Applications: 6th International Conference, San Francisco, CA, USA, 20–24 October 2003; Proceedings 6. Springer: Berlin/Heidelberg, Germany, 2003; pp. 360–372. [Google Scholar]
- Papadopoulos, Y.; McDermid, J.A. Hierarchically performed hazard origin and propagation studies. In Proceedings of the International Conference on Computer Safety, Reliability, and Security, Toulouse, France, 27–29 September 1999; Springer: Berlin/Heidelberg, Germany, 1999; pp. 139–152. [Google Scholar]
- Cisco. What Percent of Earth Is Water? 2014. Available online: https://phys.org/news/2014-12-percent-earth.html (accessed on 25 October 2023).
- Water Science School. Ice, Snow, and Glaciers and the Water Cycle. 2019. Available online: https://www.usgs.gov/special-topics/water-science-school/science/ice-snow-and-glaciers-and-water-cycle (accessed on 25 October 2023).
- Wang, E.; Attard, S.; Linton, A.; McGlinchey, M.; Xiang, W.; Philippa, B.; Everingham, Y. Development of a closed-loop irrigation system for sugarcane farms using the Internet of Things. Comput. Electron. Agric. 2020, 172, 105376. [Google Scholar] [CrossRef]
- Dahane, A.; Kechar, B.; Benameur, R. Precision Agriculture: Automated Irrigation Management Platform Using Wireless Sensor Networks. In Precision Agriculture Technologies for Food Security and Sustainability; IGI Global: Hershey, PA, USA, 2021; pp. 150–165. [Google Scholar]
- Kumar Jayam, Y.; Tunuguntla, V.; Sreehari, J.; Harinarayanan, S. Smart Plant Managing System using IoT. In Proceedings of the 2020 4th International Conference on Trends in Electronics and Informatics (ICOEI) (48184), Tirunelveli, India, 15–17 June 2020; IEEE: Toulouse, France, 2020; pp. 271–277. [Google Scholar]
- Dahane, A.; Benameur, R.; Kechar, B.; Benyamina, A. An IoT based smart farming system using machine learning. In Proceedings of the 2020 International Symposium on Networks, Computers and Communications (ISNCC), Montreal, QC, Canada, 20–22 October 2020; IEEE: Toulouse, France, 2020; pp. 1–6. [Google Scholar]
- Gutiérrez, J.; Villa-Medina, J.F.; Nieto-Garibay, A.; Porta-Gándara, M.Á. Automated irrigation system using a wireless sensor network and GPRS module. IEEE Trans. Instrum. Meas. 2013, 63, 166–176. [Google Scholar] [CrossRef]
- Saranya, T.; Deisy, C.; Sridevi, S.; Anbananthen, K.S.M. A comparative study of deep learning and Internet of Things for precision agriculture. Eng. Appl. Artif. Intell. 2023, 122, 106034. [Google Scholar] [CrossRef]
- Ale, L.; Sheta, A.; Li, L.; Wang, Y.; Zhang, N. Deep learning based plant disease detection for smart agriculture. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; IEEE: Toulouse, France, 2019; pp. 1–6. [Google Scholar]
- Taneja, N.; Garg, N.; Gupta, S.; Kaushal, R. Comparative Analysis of Convolutional Neural Network Techniques for Plant Disease Detection. In Proceedings of the 2023 4th International Conference for Emerging Technology (INCET), Belgaum, India, 26–28 May 2023; IEEE: Toulouse, France, 2023; pp. 1–4. [Google Scholar]
- Mahlein, A.K. Plant disease detection by imaging sensors–parallels and specific demands for precision agriculture and plant phenotyping. Plant Dis. 2016, 100, 241–251. [Google Scholar] [CrossRef]
- Mishra, R.; Singh, D. Convolutional Neural Network Method for Effective Plant Disease Prediction. In Proceedings of the 2023 IEEE International Conference on Integrated Circuits and Communication Systems (ICICACS), Raichur, India, 24–25 February 2023; IEEE: Toulouse, France, 2023; pp. 1–5. [Google Scholar]
- Al-Shareeda, M.A.; Manickam, S.; Saare, M.A. Intelligent Drone-based IoT Technology for Smart Agriculture System. In Proceedings of the 2022 International Conference on Data Science and Intelligent Computing (ICDSIC), Karbala, Iraq, 1–2 November 2022; IEEE: Toulouse, France, 2022; pp. 41–45. [Google Scholar]
- Maslekar, N.; Kulkarni, K.P.; Chakravarthy, A.K. Application of unmanned aerial vehicles (UAVs) for pest surveillance, monitoring and management. In Innovative Pest Management Approaches for the 21st Century: Harnessing Automated Unmanned Technologies; Springer: Singapore, 2020; pp. 27–45. [Google Scholar]
- Dutta, J.; Dutta, J.; Gogoi, S. Smart farming: An opportunity for efficient monitoring and detection of pests and diseases. J. Entomol. Zool. Stud 2020, 8, 2352–2359. [Google Scholar]
- Cicioğlu, M.; Çalhan, A. Smart agriculture with internet of things in cornfields. Comput. Electr. Eng. 2021, 90, 106982. [Google Scholar] [CrossRef]
- Darwin, B.; Dharmaraj, P.; Prince, S.; Popescu, D.E.; Hemanth, D.J. Recognition of bloom/yield in crop images using deep learning models for smart agriculture: A review. Agronomy 2021, 11, 646. [Google Scholar] [CrossRef]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Van Henten, E. Selective harvesting robotics: Current research, trends, and future directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Kalantari, F.; Tahir, O.M.; Joni, R.A.; Fatemi, E. Opportunities and challenges in sustainability of vertical farming: A review. J. Landsc. Ecol. 2018, 11, 35–60. [Google Scholar] [CrossRef]
- Siregar, R.R.A.; Seminar, K.B.; Wahjuni, S.; Santosa, E. Vertical farming perspectives in support of precision agriculture using artificial intelligence: A review. Computers 2022, 11, 135. [Google Scholar] [CrossRef]
- Abhay, V.S.; Fahida, V.H.; Reshma, T.R.; Sajan, C.K.; Shelly, S. IoT-Based Home Vertical Farming. In Intelligent Systems, Technologies and Applications; Paprzycki, M., Thampi, S.M., Mitra, S., Trajkovic, L., El-Alfy, E.S.M., Eds.; Springer: Singapore, 2021; pp. 151–160. [Google Scholar]
- Kundu, K.; Sharma, S.; Bhardwaj, B.; Muddineni, R.; Rai, A. Design & Development of IoT based Vertical Farming Monitoring System. In Proceedings of the 2023 International Conference on Artificial Intelligence and Smart Communication (AISC), Greater Noida, India, 27–29 January 2023; IEEE: Toulouse, France, 2023; pp. 1018–1021. [Google Scholar]
- Putri, R.E.; Wibowo, M.; Ardli, J.; Andasuryani, A. Monitoring and controlling of vertical farming system using Internet of Things (IoT). In Proceedings of the AIP Conference Proceedings, Padang, Indonesia, 3–4 November 2021; AIP Publishing: New York, NY, USA, 2023. [Google Scholar]
- Kaur, G.; Upadhyaya, P.; Chawla, P. Comparative analysis of IoT-based controlled environment and uncontrolled environment plant growth monitoring system for hydroponic indoor vertical farm. Environ. Res. 2023, 222, 115313. [Google Scholar] [CrossRef]
- Kaur, G.; Upadhyaya, P.; Chawla, P. Iot based mobile application for monitoring of hydroponic vertical farming. In Proceedings of the 2022 10th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 13–14 October 2022; IEEE: Toulouse, France, 2022; pp. 1–4. [Google Scholar]
- Maraveas, C. Incorporating artificial intelligence technology in smart greenhouses: Current State of the Art. Appl. Sci. 2022, 13, 14. [Google Scholar] [CrossRef]
- Escamilla-García, A.; Soto-Zarazúa, G.M.; Toledano-Ayala, M.; Rivas-Araiza, E.; Gastélum-Barrios, A. Applications of artificial neural networks in greenhouse technology and overview for smart agriculture development. Appl. Sci. 2020, 10, 3835. [Google Scholar] [CrossRef]
- Kagan, C.R.; Arnold, D.P.; Cappelleri, D.J.; Keske, C.M.; Turner, K.T. Special report: The Internet of Things for Precision Agriculture (IoT4Ag). Comput. Electron. Agric. 2022, 196, 106742. [Google Scholar] [CrossRef]
- Mishra, S.; Sharma, S.K. Advanced contribution of IoT in agricultural production for the development of smart livestock environments. Internet Things 2023, 22, 100724. [Google Scholar] [CrossRef]
- Benaissa, S.; Tuyttens, F.; Plets, D.; Martens, L.; Vandaele, L.; Joseph, W.; Sonck, B. Improved cattle behaviour monitoring by combining Ultra-Wideband location and accelerometer data. Animal 2023, 17, 100730. [Google Scholar] [CrossRef]
- Ilyas, Q.M.; Ahmad, M. Smart farming: An enhanced pursuit of sustainable remote livestock tracking and geofencing using IoT and GPRS. Wirel. Commun. Mob. Comput. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Xu, X.; Du, Z.; Bai, Z.; Wang, S.; Wang, C.; Li, D. Fault diagnosis method of dissolved oxygen sensor electrolyte loss based on impedance measurement. Comput. Electron. Agric. 2023, 212, 108123. [Google Scholar] [CrossRef]
- Jenab, K.; Pineau, J. Failure mode and effect analysis on safety critical components of space travel. Manag. Sci. Lett. 2015, 5, 669–678. [Google Scholar] [CrossRef]
- Kabir, S.; Papadopoulos, Y. Applications of Bayesian networks and Petri nets in safety, reliability, and risk assessments: A review. Saf. Sci. 2019, 115, 154–175. [Google Scholar] [CrossRef]
- Patrizi, G.; Bartolini, A.; Ciani, L.; Catelani, M. Failure analysis of a smart sensor node for precision agriculture. In Proceedings of the 18th IMEKO TC10 Conference, Warsaw, Poland, 16–27 September 2022; pp. 26–31. [Google Scholar]
- Wang, Y.; Zhang, R.; Zhang, X.; Zhang, Y. Privacy Risk Assessment of Smart Home System Based on a STPA–FMEA Method. Sensors 2023, 23, 4664. [Google Scholar] [CrossRef]
- Korsunovs, A.; Doikin, A.; Campean, F.; Kabir, S.; Hernandez, E.; Taggart, D.; Parker, S.; Mills, G. Towards a Model-Based Systems Engineering Approach for Robotic Manufacturing Process Modelling with Automatic FMEA Generation. Proc. Des. Soc. 2022, 2, 1905–1914. [Google Scholar] [CrossRef]
- Abdulhamid, A.; Kabir, S.; Ghafir, I.; Lei, C. Reliability Assessment of IoT-enabled Systems using Fault Trees and Bayesian Networks. In Proceedings of the 5th International Conference on Advances in Distributed Computing and Machine Learning (ICADCML), Amaravati, India, 5–6 June 2024; pp. 1–10. [Google Scholar]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; Morgan Kaufmann: San Francisco, CA, USA, 1988. [Google Scholar]
- Xiao, Q.; Li, Y.; Luo, F.; Liu, H. Analysis and assessment of risks to public safety from unmanned aerial vehicles using fault tree analysis and Bayesian network. Technol. Soc. 2023, 73, 102229. [Google Scholar] [CrossRef]
- Kabir, S.; Aslansefat, K.; Sorokos, I.; Papadopoulos, Y.; Konur, S. A hybrid modular approach for dynamic fault tree analysis. IEEE Access 2020, 8, 97175–97188. [Google Scholar] [CrossRef]
- Kou, L.; Chu, B.; Chen, Y.; Qin, Y. An Automatic Partition Time-Varying Markov Model for Reliability Evaluation. Appl. Sci. 2022, 12, 5933. [Google Scholar] [CrossRef]
- Reisig, W. Petri Nets: An Introduction; Springer Science & Business Media: New York, NY, USA, 2012; Volume 4. [Google Scholar]
- Zurawski, R.; Zhou, M. Petri nets and industrial applications: A tutorial. IEEE Trans. Ind. Electron. 1994, 41, 567–583. [Google Scholar] [CrossRef]
- Kabir, S.; Azad, T.; Walker, M.; Gheraibia, Y. Reliability analysis of automated pond oxygen management system. In Proceedings of the 2015 18th International Conference on Computer and Information Technology (ICCIT), Dhaka, Bangladesh, 21–23 December 2015; IEEE: Toulouse, France, 2015; pp. 144–149. [Google Scholar]
- Wongvises, C.; Khurat, A.; Fall, D.; Kashihara, S. Fault tree analysis-based risk quantification of smart homes. In Proceedings of the 2nd International Conference on Information Technology (INCIT), Nakhonpathom, Thailand, 2–3 November 2017; IEEE: Toulouse, France, 2017; pp. 1–6. [Google Scholar]
- Wang, C.; Liu, Q.; Xing, L.; Guan, Q.; Yang, C.; Yu, M. Reliability analysis of smart home sensor systems subject to competing failures. Reliab. Eng. Syst. Saf. 2022, 221, 108327. [Google Scholar] [CrossRef]
- Silva, I.; Leandro, R.; Macedo, D.; Guedes, L.A. A dependability evaluation tool for the Internet of Things. Comput. Electr. Eng. 2013, 39, 2005–2018. [Google Scholar] [CrossRef]
- Silva, D.; Heideker, A.; Zyrianoff, I.D.; Kleinschmidt, J.H.; Roffia, L.; Soininen, J.P.; Kamienski, C.A. A management architecture for IoT smart solutions: Design and implementation. J. Netw. Syst. Manag. 2022, 30, 35. [Google Scholar] [CrossRef]
- Gao, D.X.; Hou, J.J.; Liang, K.; Yang, Q. Fault diagnosis system for electric vehicle charging devices based on fault tree analysis. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; IEEE: Toulouse, France, 2018; pp. 5055–5059. [Google Scholar]
- Rahman, M.M.; Abdulhamid, A.; Kabir, S. Qualitative Failure Analysis of IoT-enabled Industrial Fire Detection and Prevention System. In Proceedings of the 26th International Conference on Computer and Information Technology (ICCIT), Cox’s Bazar, Bangladesh, 13–15 December 2023; IEEE: Toulouse, France, 2023; pp. 1–6. [Google Scholar]
- Dai, W.; Riliskis, L.; Wang, P.; Vyatkin, V.; Guan, X. A cloud-based decision support system for self-healing in distributed automation systems using fault tree analysis. IEEE Trans. Ind. Informatics 2018, 14, 989–1000. [Google Scholar] [CrossRef]
- Chen, Y.; Zhen, Z.; Yu, H.; Xu, J. Application of fault tree analysis and fuzzy neural networks to fault diagnosis in the internet of things (IoT) for aquaculture. Sensors 2017, 17, 153. [Google Scholar] [CrossRef]
- Ruijters, E.; Stoelinga, M. Fault tree analysis: A survey of the state-of-the-art in modeling, analysis and tools. Comput. Sci. Rev. 2015, 15, 29–62. [Google Scholar] [CrossRef]
- Bell, R. Introduction and Revision of IEC 61508. In Proceedings of the Advances in Systems Safety: Proceedings of the Nineteenth Safety-Critical Systems Symposium, Southampton, UK, 8–10 February 2011; Springer: Berlin/Heidelberg, Germany, 2010; pp. 273–291. [Google Scholar]
- Kaiser, B.; Liggesmeyer, P.; Mäckel, O. A New Component Concept for Fault Trees. In Proceedings of the 8th Australian Workshop on Safety Critical Systems and Software (SCS’03), Canberra, ACT, Australia, 9–10 October 2003; Volume 33, pp. 37–46. [Google Scholar]
- Papadopoulos, Y.; Walker, M.; Parker, D.; Sharvia, S.; Bottaci, L.; Kabir, S.; Azevedo, L.; Sorokos, I. A synthesis of logic and bio-inspired techniques in the design of dependable systems. Annu. Rev. Control 2016, 41, 170–182. [Google Scholar] [CrossRef]
- Nordmann, A.; Munk, P. Lessons learned from model-based safety assessment with SysML and component fault trees. In Proceedings of the 21th ACM/IEEE International Conference on Model Driven Engineering Languages and Systems, Copenhagen, Denmark, 14–19 October 2018; pp. 134–143. [Google Scholar]
- Kabir, S.; Walker, M.; Papadopoulos, Y. Dynamic system safety analysis in HiP-HOPS with Petri nets and Bayesian networks. Saf. Sci. 2018, 105, 55–70. [Google Scholar] [CrossRef]
- Mian, Z.; Bottaci, L.; Papadopoulos, Y.; Biehl, M. System dependability modelling and analysis using AADL and HiP-HOPS. IFAC Proc. Vol. 2012, 45, 1647–1652. [Google Scholar] [CrossRef]
- Wang, H.; Zhong, D.; Zhao, T.; Ren, F. Integrating model checking with SysML in complex system safety analysis. IEEE Access 2019, 7, 16561–16571. [Google Scholar] [CrossRef]
- Mhenni, F.; Nguyen, N.; Choley, J.Y. SafeSysE: A safety analysis integration in systems engineering approach. IEEE Syst. J. 2016, 12, 161–172. [Google Scholar] [CrossRef]










| Ser | Strengths | Description |
|---|---|---|
| 1. | Systematic Approach | FTA provides a structured and systematic method for analysing potential failures in a system and helps to identify the root causes of failures in a logical manner. |
| 2. | Visual Representation | It uses a tree-like structure that helps visualise the relationships between different events and their contributions to system failure. |
| 3. | Facilitates Communication | The graphical nature of FTA facilitates communication among stakeholders, making it easier to convey complex system failure scenarios and their implications. |
| 4. | Root Cause Analysis | FTA helps identify system failure’s root causes. |
| 5. | Identifying Critical Paths | FTA helps to identify critical paths or combinations of events that may lead to system failure. |
| 6. | Quantitative and Qualitative Analysis | FTA can be used for both qualitative analysis (identifying failure paths) and quantitative analysis (estimating probabilities of failure events). |
| 7. | Early Detection of Issues | Potential issues and vulnerabilities can be identified during the design phase, allowing for proactive risk mitigation. |
| 8. | Continuous Improvement | FTA can be applied iterative throughout the design and operational phases, allowing for continuous improvement in system reliability by addressing identified vulnerabilities. |
| 9. | Supports Risk Management | It is widely used in risk assessment to evaluate the likelihood and consequences of potential system failures. |
| 10. | Facilitates Decision Making | FTA supports decision-making processes related to system design, maintenance, and risk mitigation. |
| 11. | Versatility | FTA can be applied to various systems, including engineering systems, industrial processes, and complex projects. |
| 12. | Integration with Other Methods | FTA can be integrated with other analysis methods, such as FMEA, to provide a more comprehensive understanding of system reliability and safety. |
| Ser | SysML Diagrams | Features/Functions |
|---|---|---|
| 1. | Activity Diagram | Illustrates the system’s behaviour, control flow, object flow, decision, and end process. |
| 2. | State Machine Diagram | Model the various states of a system and the transitions between them. They can represent single or parallel states, including initial, idle, active, and standby. |
| 3. | Sequence Diagram | Model sequencing or order of the system’s operations. |
| 4. | Timing Diagram | Represents the hierarchy of timings in which a system executes actions. |
| 5. | Use Case Diagram | Model how users (actors) can use the system or corroborate with one another. |
| 6. | Class Diagram | Software or hardware model classes, each with a name and attributes, depict the structure of the system design in terms of classes and constraints. |
| 7. | Block Definition Diagram | Present the structure and hierarchy of a system block (software/hardware) through classes and constraints. Describe generalisation (inheritance between classes), aggregation, and dependencies. |
| 8. | Internal Block Diagram | Model the internal structure of a system and how components block exchange information. |
| 9. | Component Diagram | Model components in the system and their interface (how they can be connected). |
| 10. | Parametric Diagram | Model parametric constraints between blocks. |
| 11. | Requirement Diagram | Model system operation requirements and the interrelationships between its various elements. |
| 12. | Package Diagram | Model is organised into packages, views, and viewpoints. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdulhamid, A.; Rahman, M.M.; Kabir, S.; Ghafir, I. Enhancing Safety in IoT Systems: A Model-Based Assessment of a Smart Irrigation System Using Fault Tree Analysis. Electronics 2024, 13, 1156. https://doi.org/10.3390/electronics13061156
Abdulhamid A, Rahman MM, Kabir S, Ghafir I. Enhancing Safety in IoT Systems: A Model-Based Assessment of a Smart Irrigation System Using Fault Tree Analysis. Electronics. 2024; 13(6):1156. https://doi.org/10.3390/electronics13061156
Chicago/Turabian StyleAbdulhamid, Alhassan, Md Mokhlesur Rahman, Sohag Kabir, and Ibrahim Ghafir. 2024. "Enhancing Safety in IoT Systems: A Model-Based Assessment of a Smart Irrigation System Using Fault Tree Analysis" Electronics 13, no. 6: 1156. https://doi.org/10.3390/electronics13061156