




TraModeAVTest: Modeling Scenario and Violation Testing for Autonomous Driving Systems Based on Traffic Regulations

Abstract
:1. Introduction
- We proposed a formal definition and combination relationships of autonomous driving scenarios and constructed a Petri net model for the complex traffic regulation scenarios based on the combination of basic traffic regulation scenarios. The consistency of the model design with traffic regulation requirements has been validated using formal methods;
- We introduced coverage criteria suitable for Petri nets and utilized a search strategy to generate scenario model paths that represent traffic regulations. Subsequently, we have iteratively generated test cases for covering the model paths using a parameter combination approach;
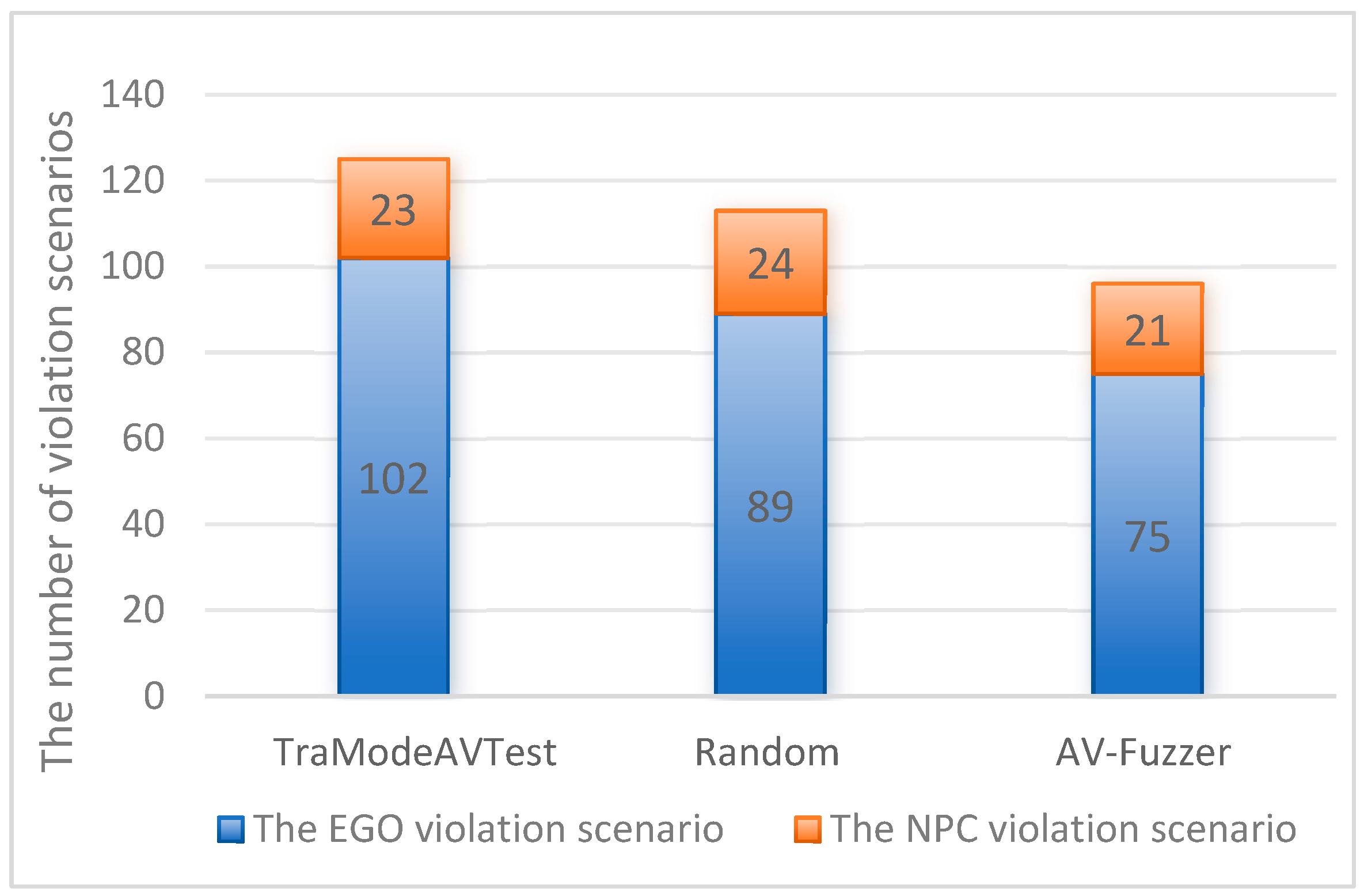
- TraModeAVTest was evaluated using simulation experiments on the Baidu Apollo platform. The experimental results demonstrate that the test cases generated by TraModeAVTest, covering traffic regulation scenario model paths, effectively represent traffic regulations and can efficiently test violations of traffic regulations within the ADS. Furthermore, the experimental comparisons with baseline methods indicate that TraModeAVTest effectively improves the efficiency of generating different types of violation scenarios.
2. Related Work
3. Background
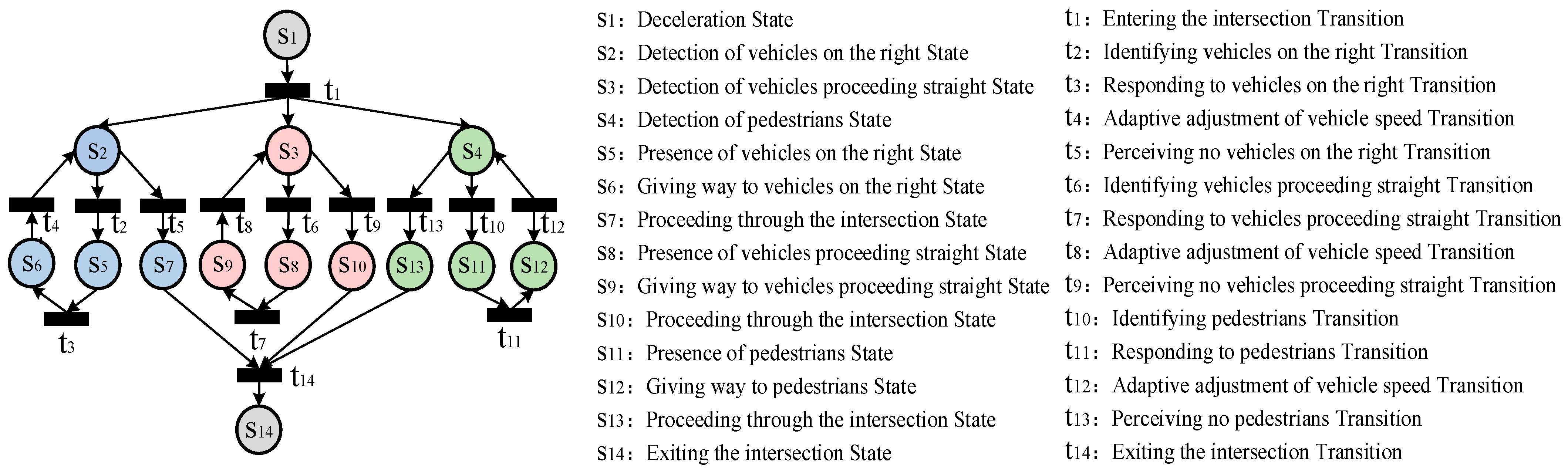
3.1. Petri Net
- , where , .
3.2. Model Path
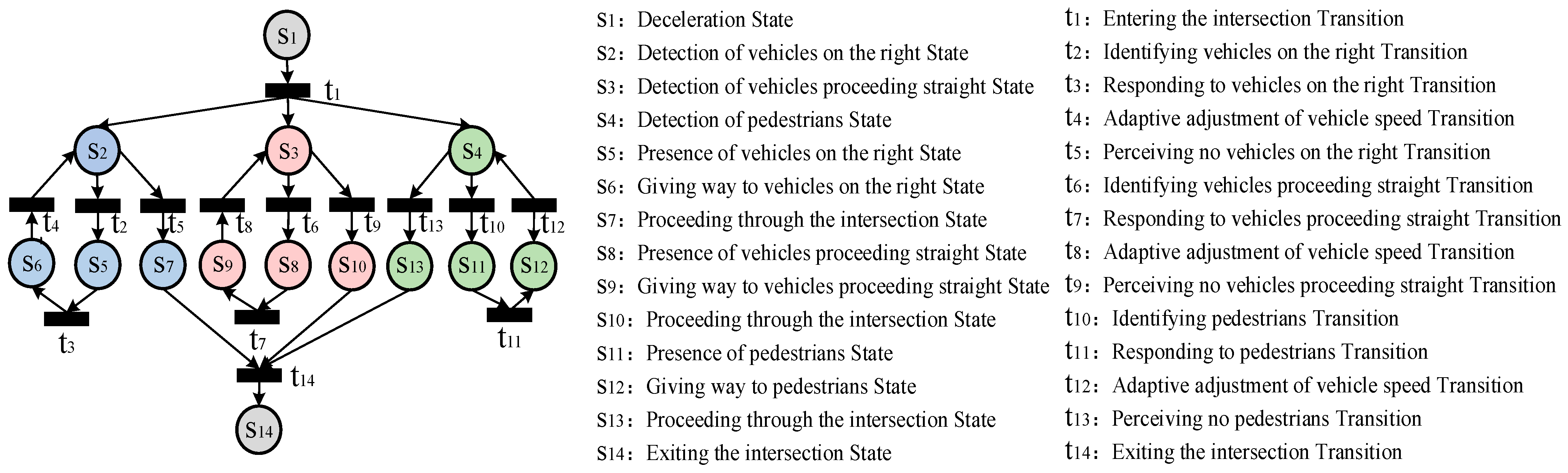
- The path represents the traffic regulation “vehicles on the left yield to vehicles on the right at the intersection”, i.e., .
- The path represents the traffic regulation “turning vehicles yield to vehicles going straight at the intersection”, i.e., .
- The path represents the traffic regulation “vehicles yield to pedestrians at the intersection”, i.e., .
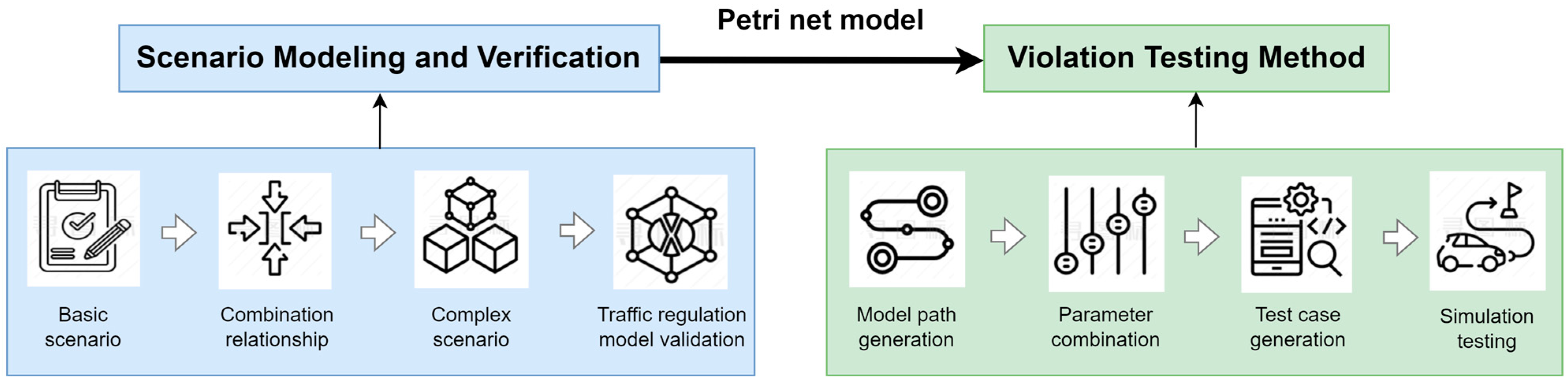
3.3. Method Overview
4. Scenario Modeling and Validation
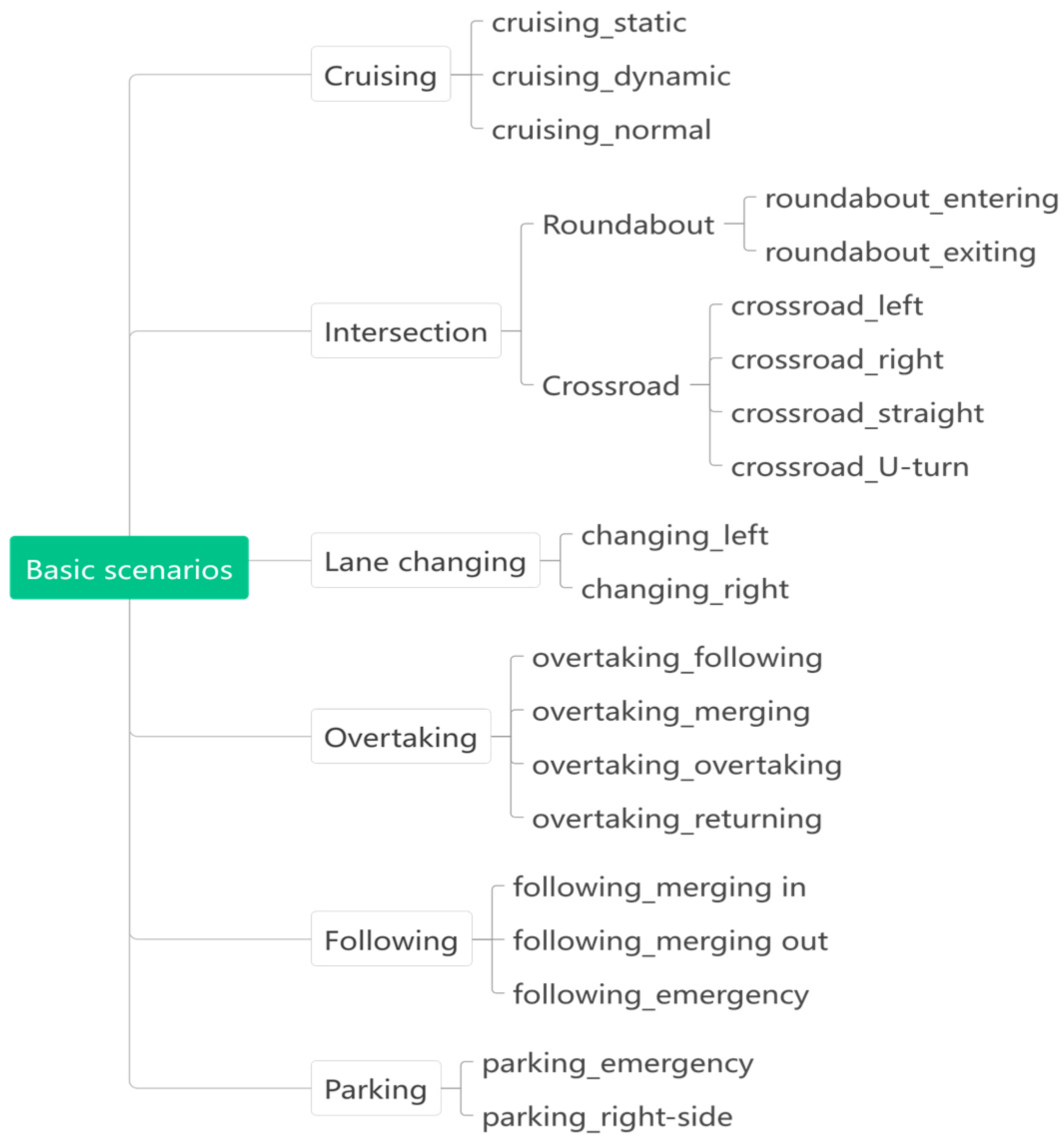
4.1. Scenario Combination Relationship
- Relation 1:
- Cruising = cruising_static cruising_dynamic cruising_normal.
- Relation 2:
- Lane changing = changing_left changing_right.
- Relation 3:
- Following = following_merging in following_merging out following_emergency.
- Relation 4:
- Intersection = Roundabout Crossroad.
- Relation 4.1:
- Roundabout = roundabout_entering roundabout_exiting.
- Relation 4.2:
- Crossroad = crossroad_left crossroad_straight crossroad_right crossroad_U-turn.
- Relation 5:
- Overtaking = overtaking_following overtaking_merging overtaking_overtaking overtaking_returning.
- Relation 6:
- Parking = parking_emergency parking_right-side.
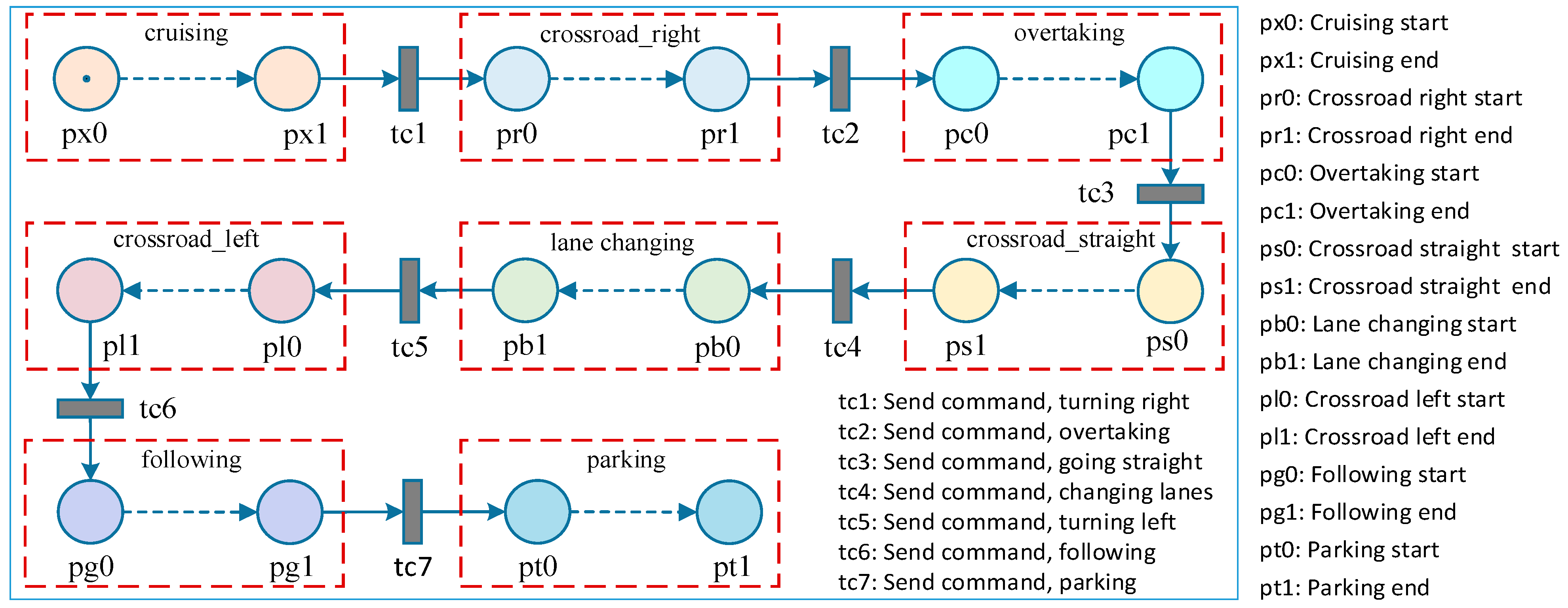
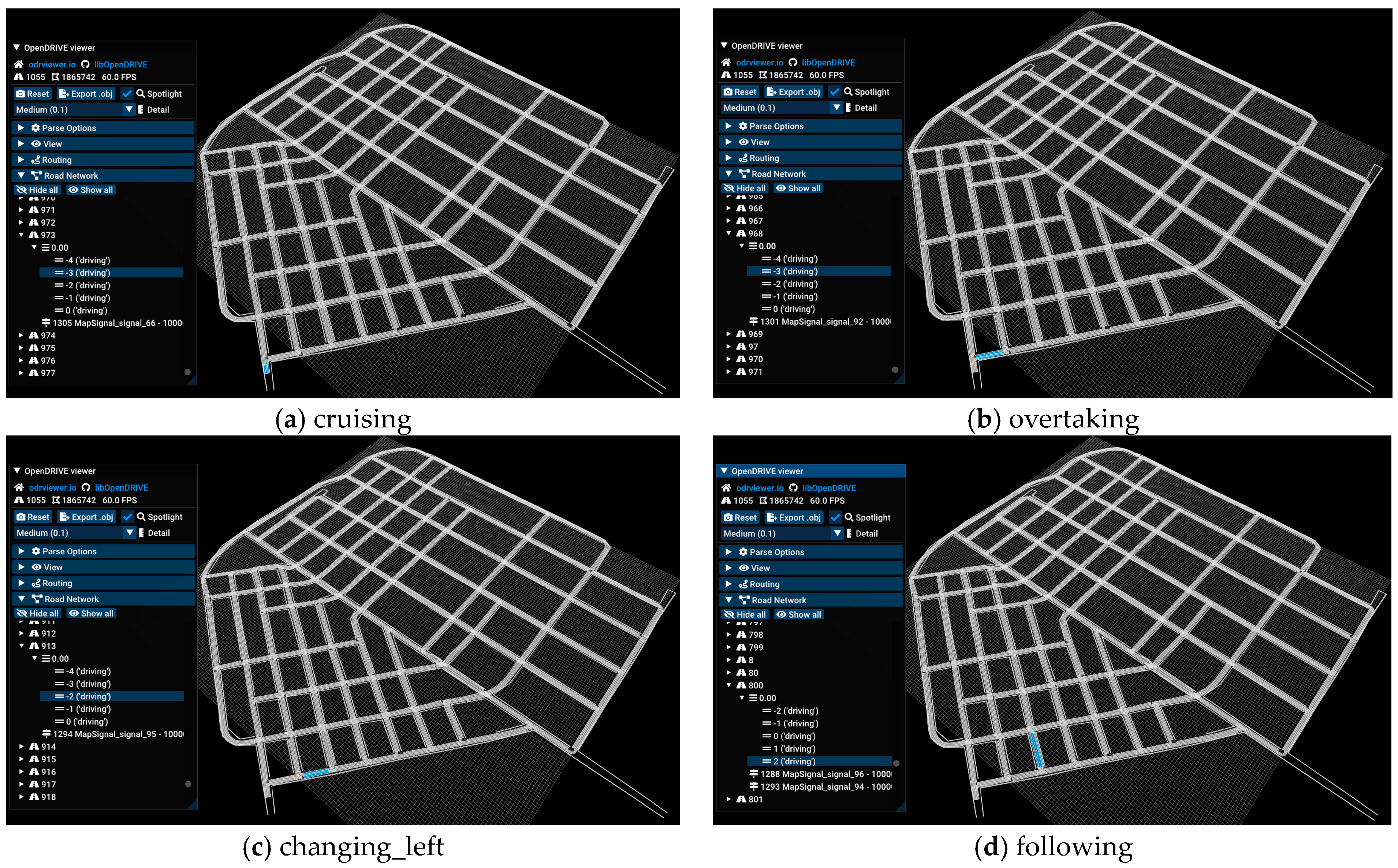
4.2. Complex Scenario Modeling
4.3. Scenario Model Validation
5. Violation Testing Method
5.1. Test Path Generation
- Place coverage criterion: The test case set should ensure that all places in the Petri net model are accessed at least once.
- Transition coverage criterion: The test case set should ensure that all transitions in the Petri net model are activated at least once.
- Place-transition coverage criterion: The test case set should ensure that all places in the Petri net model are accessed at least once, and all transitions are activated at least once.
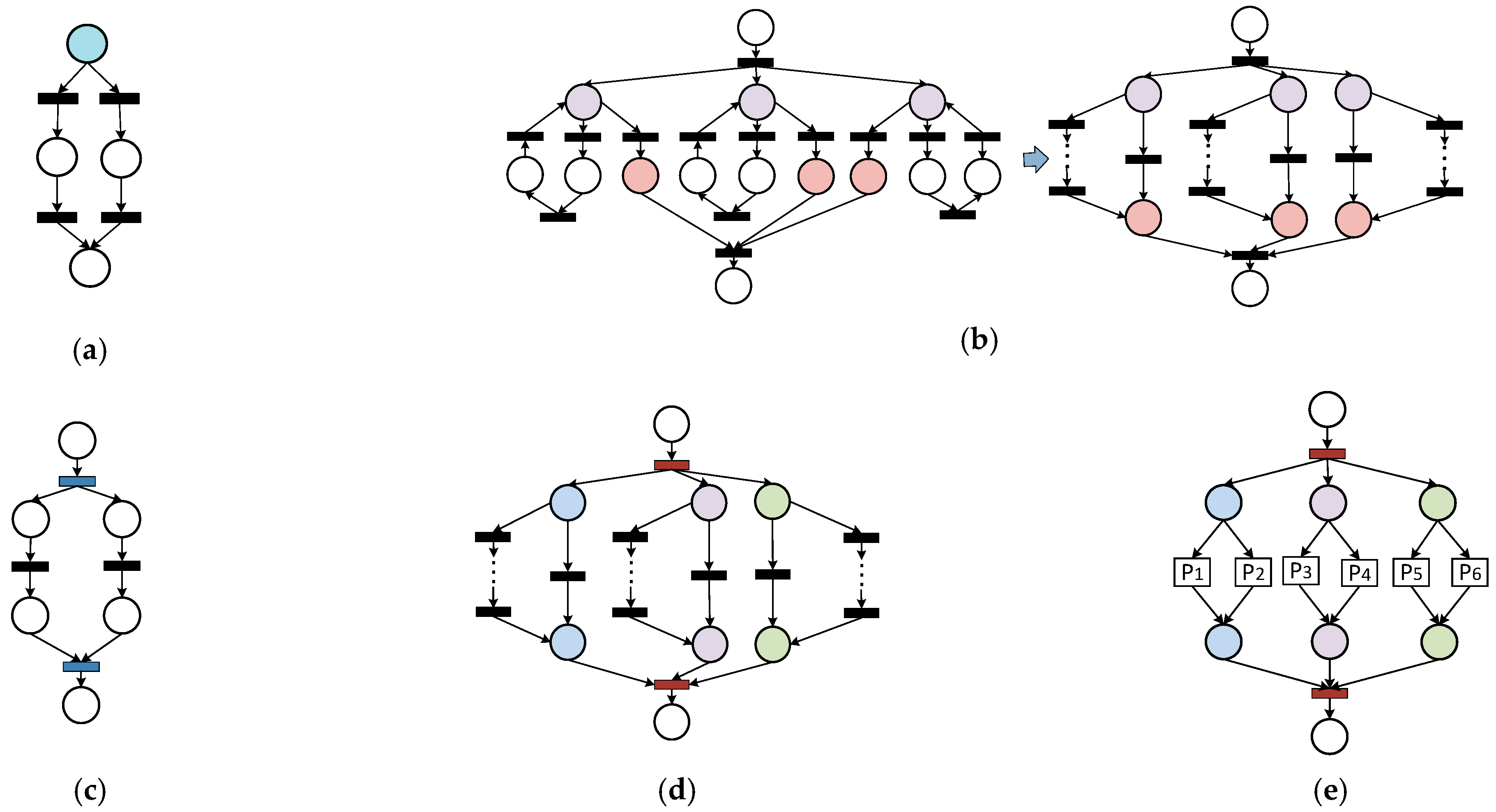
- Non-existence of mutually exclusive branches: Within the concurrent-synchronization structure, there is not just a single path for the interacting transitions; rather, there are no mutually exclusive branches, as depicted in Figure 7c. In this simple structure devoid of mutually exclusive branches, there are numerous methods for selecting concurrent-synchronization paths. By employing a random generation approach to sequentially select paths for testing, the outcomes remain consistent, thus mitigating issues such as combinatorial explosion and repetitive testing.
- Existence of mutually exclusive branches: Within the concurrent-synchronization structure, there are multiple paths for the interacting transitions, and mutually exclusive branches exist, as depicted in Figure 7d. In its simplified Figure 7e, the mutually exclusive branches are with , with , and with . Analysis of the selection structure reveals that mutually exclusive paths cannot be executed simultaneously; thus, these mutually exclusive branches cannot be directly chosen as concurrent-synchronization paths. In the concurrent-synchronization structure, if the number of groups of interacting places is denoted as , and the corresponding number of mutually exclusive branches is , then the combination number of the interacting places is , with each combination representing a concurrent-synchronization path. In the concurrent-synchronization structure, the number of concurrent-synchronization paths increases when multiple branches are involved, leading to a combinatorial explosion. In response to this scenario, we adopt the pairwise combination testing coverage method.
5.2. Test Case Generation
| Algorithm 1: Test Case Generation for Path Coverage. |
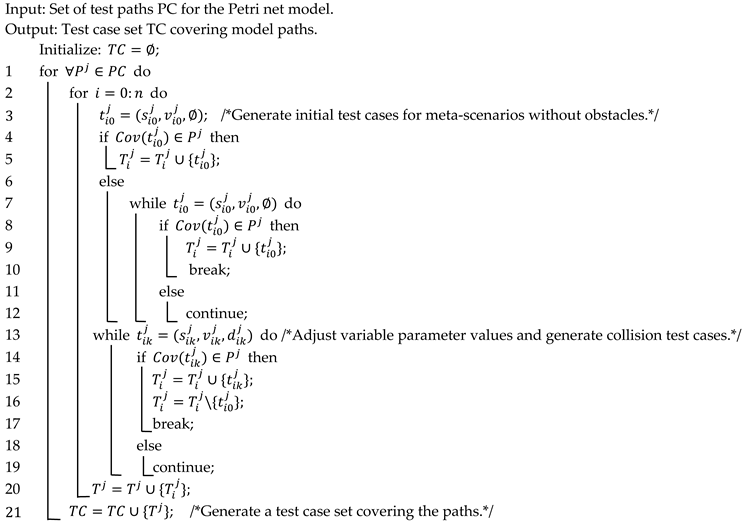 |
5.3. Simulation Experiment
- Effectiveness: Can the test cases generated by TraModeAVTest effectively detect violations of the ADS?
- Efficiency: Can TraModeAVTest improve the efficiency of generating violation scenarios compared to baseline methods?
5.3.1. Effectiveness Analysis
- 1.
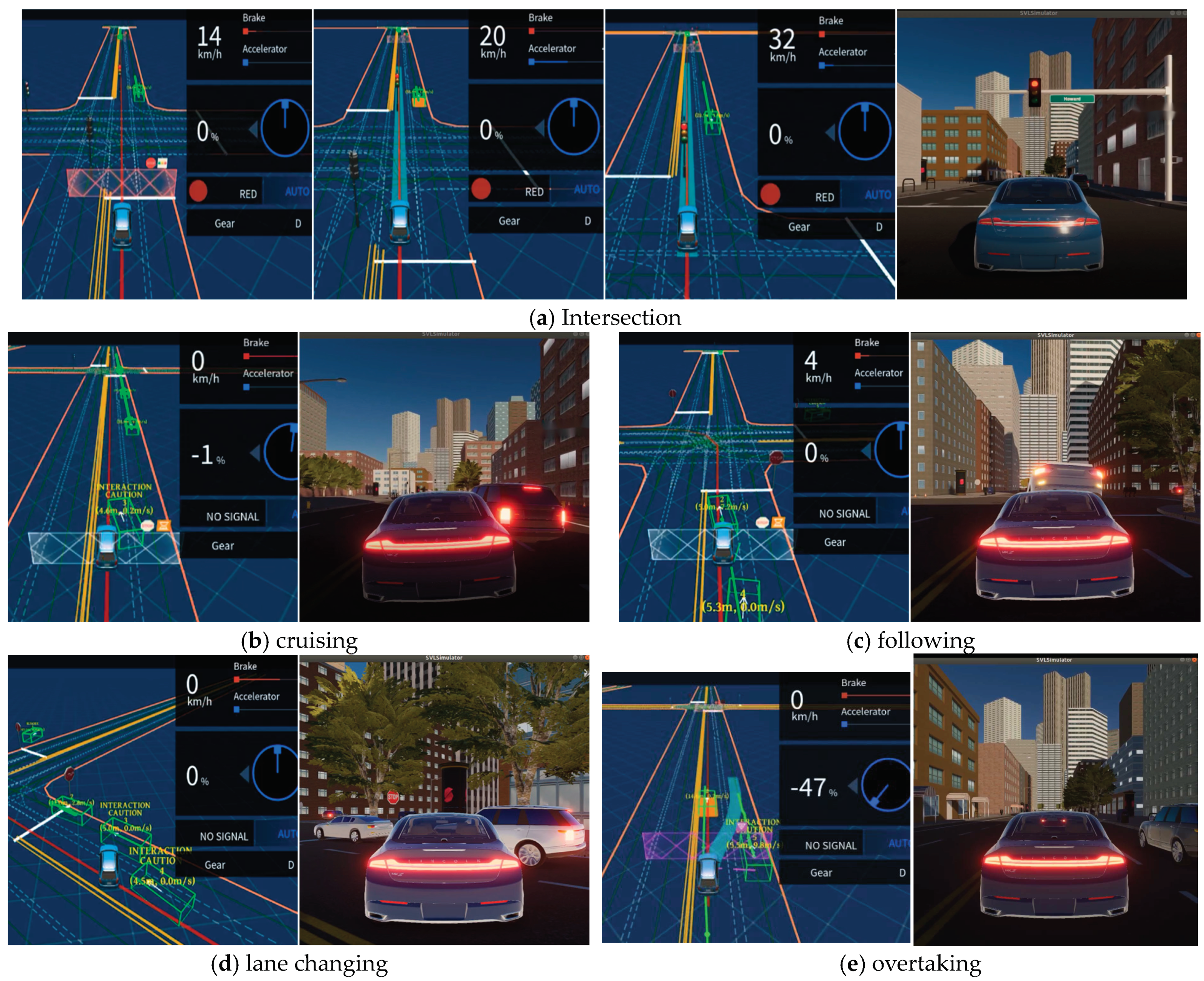
- Intersection scenario: The EGO runs a red light and accelerates through the intersection, as shown in Figure 9a. When approaching the intersection stop line, the speed of the EGO is 14 km per hour, and the traffic signal is red. Despite the absence of a collision, the EGO chooses to proceed through the intersection instead of stopping. Upon entering the intersection, the speed of the EGO is 20 km per hour, posing a significant danger. As the EGO exits the intersection at a speed of 32 km per hour, it is already speeding. In this scenario, if the NPCs are passing through the intersection, the EGO running a red light and speeding could likely lead to a traffic accident.
- 2.
- Cruising scenario: The EGO engaged in cruising, collides with an NPC that cuts in from the right, as shown in Figure 9b. As the EGO cruises, an NPC from the adjacent right lane cuts in. The insufficient safe distance between the EGO and the NPC, coupled with the failure of the EGO to yield to the NPC in a timely manner, results in a collision between the two vehicles. In this scenario, if the EGO maintains a sufficient safe distance from the NPC and brakes promptly to yield, the collision could be avoided.
- 3.
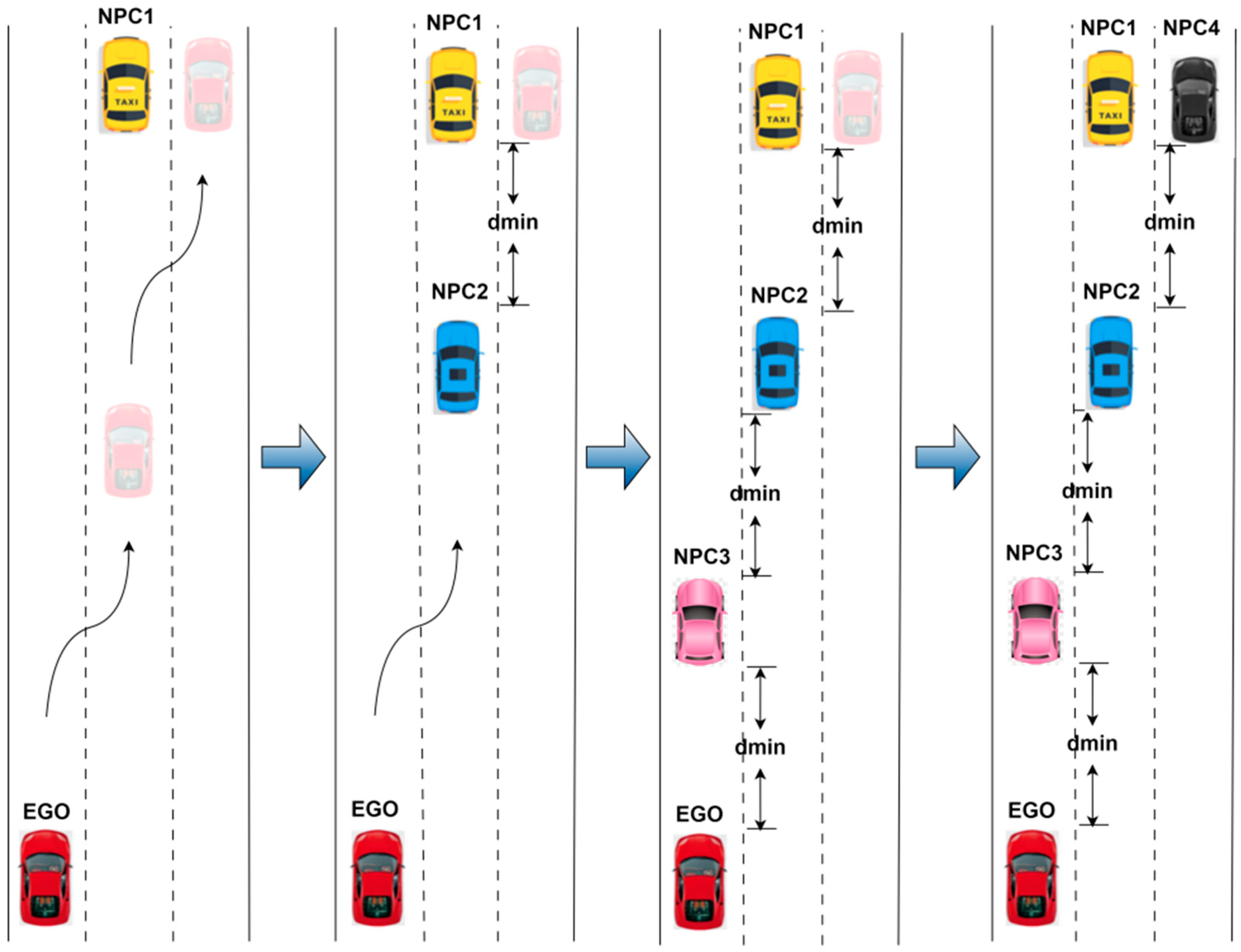
- Following scenario: The EGO following another vehicle, collides with a decelerating NPC in front, as shown in Figure 9c. As the NPC in front decelerates while approaching an intersection, the EGO following behind, maintains its current velocity. The inadequate safe distance between the EGO and the NPC leaves insufficient time for deceleration and braking, leading to the EGO rear-ending the NPC. In this scenario, maintaining a proper safe distance between the EGO and the NPC could have averted the rear-end collision.
- 4.
- Lane changing scenario: The EGO abruptly changes direction and plans to switch to the right lane as it approaches the intersection, as shown in Figure 9d. As the EGO is about to reach the intersection and the adjacent right lane NPC is traveling at a high speed, the sudden lane change by the EGO nearly causes a traffic accident. Furthermore, the abrupt lane change of the EGO obstructs the normal movement of the NPC behind it, almost resulting in a rear-end collision. In this situation, the EGO should maintain its original lane and proceed through the intersection as usual.
- 5.
- Overtaking scenario: The EGO erroneously plans an overtaking route, as shown in Figure 9e. As the front NPC decelerates and the NPC in the adjacent lane behind accelerates rapidly, the EGO generates a trajectory to change lanes to the right for a forced overtaking, almost resulting in a traffic accident. In this situation, both the EGO and NPC should maintain a sufficient safe distance, and the EGO should decelerate and continue in its original lane.
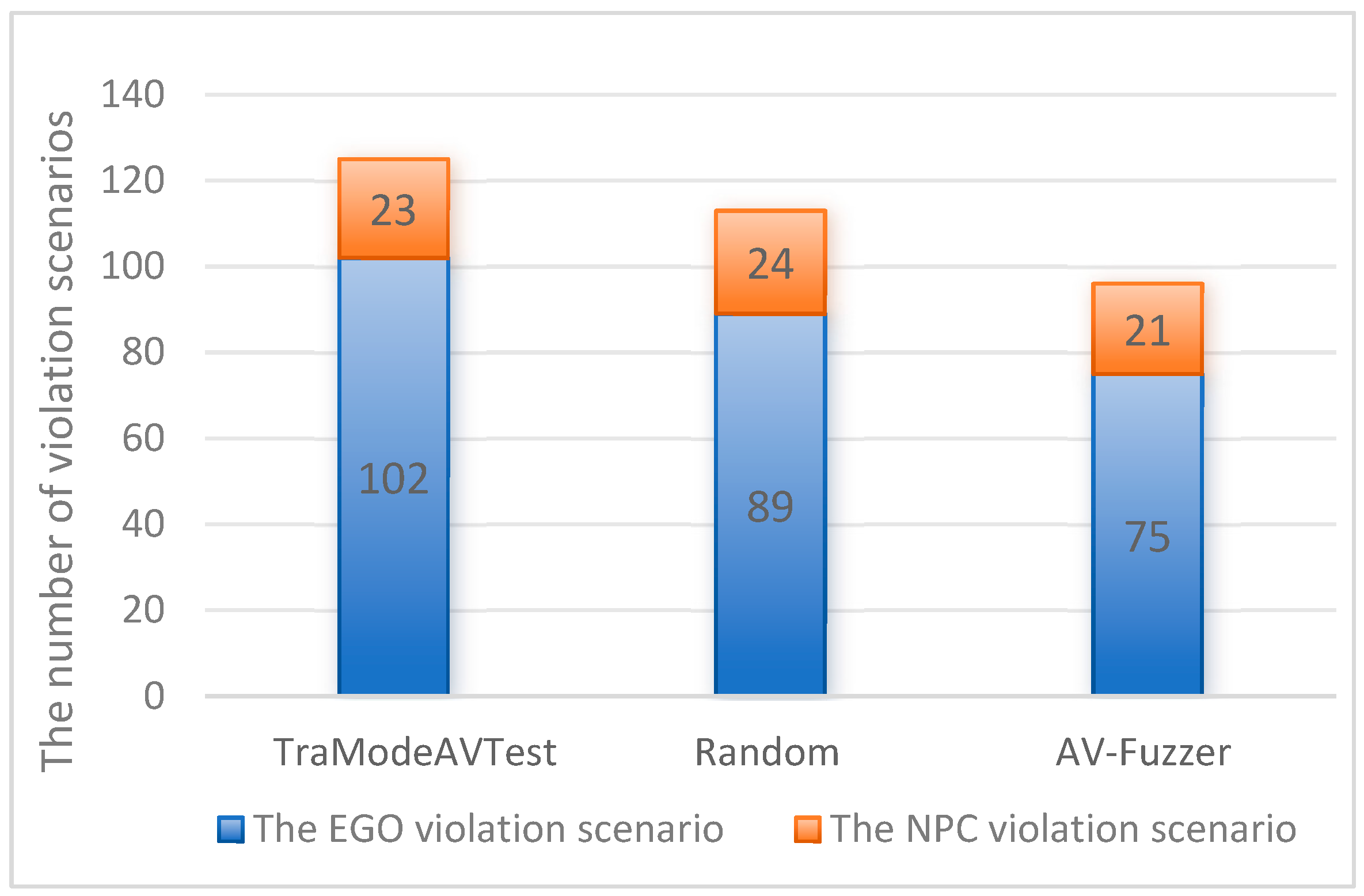
5.3.2. Efficiency Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tang, Y.; Zhou, Y.; Liu, Y.; Sun, J.; Wang, G. Collision avoidance testing for autonomous driving systems on complete maps. In Proceedings of the 2021 IEEE Intelligent Vehicles Symposium (IV), Nagoya, Japan, 11–17 July 2021; pp. 179–185. [Google Scholar] [CrossRef]
- An, D.; Liu, J.; Chen, X.; Sun, H.Y. Formal modeling and dynamic verification for human cyber physical systems under uncertain environment. J. Softw. 2021, 32, 1999–2015. [Google Scholar] [CrossRef]
- Wu, H.; Wang, H.; Su, X.; Li, M.; Xu, F.; Zhong, S. Security testing of visual perception module in autonomous driving system. J. Comput. Res. Dev. 2022, 59, 1133–1147. [Google Scholar] [CrossRef]
- Zhao, Xiang-mo’s Team Supported by the National Key Research and Development Program of China (2021YFB2501200). Research progress in testing and evaluation technologies for autonomous driving. J. Traffic Transp. Eng. 2023, 23, 10–77. [Google Scholar] [CrossRef]
- Rong, G.; Shin, B.; Tabatabaee, H.; Lu, Q.; Steve, L.; Možeiko, M.; Boise, E.; Uhm, G.; Gerow, M.; Mehta, S.; et al. LGSVL simulator: A high fidelity simulator for autonomous driving. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An open urban driving simulator. In Proceedings of the 1st Annual Conference on Robot Learning (CoRL), Mountain View, CA, USA, 10 November 2017; pp. 1–16. [Google Scholar] [CrossRef]
- Deng, W.; Li, J.; Ren, B.; Wang, W.; Ding, J. A survey on automatic simulation generation methods for autonomous driving. China J. Highw. Transp. 2022, 35, 316–333. [Google Scholar] [CrossRef]
- Yu, R.; Tian, Y.; Sun, J. Highly automated vehicle virtual testing: A review of recent developments and research frontiers. China J. Highw. Transp. 2020, 33, 125–138. [Google Scholar] [CrossRef]
- Zhou, Y.; Sun, Y.; Tang, Y.; Chen, Q.; Sun, J. Specification-based Autonomous Driving System Testing. IEEE Trans. Softw. Eng. 2023, 1–19. [Google Scholar] [CrossRef]
- Deng, Y.; Yao, J.; Tu, Z.; Zheng, X.; Zhang, M.; Zhang, T. Target: Traffic rule-based test generation for autonomous driving systems. arXiv 2023, arXiv:2305.06018. [Google Scholar] [CrossRef]
- Lou, G.; Deng, Y.; Zheng, X.; Zhang, M.; Zhang, T. Testing of autonomous driving systems: Where are we and where should we go? In Proceedings of the 2022 30th ACM Joint European Software Engineering Conference and Symposium on the Foundations of Software Engineering, Singapore, 14–18 November 2022; pp. 31–43. [Google Scholar] [CrossRef]
- Tesla. “Autonomous Driving Unit”. Available online: https://www.tesla.com/autopilot (accessed on 10 April 2022).
- Baidu. “Apollo Open Platform”. Available online: https://apollo.auto/ (accessed on 10 December 2021).
- Autoware.AI. “Autoware.AI”. Available online: https://www.autoware.ai/ (accessed on 17 April 2022).
- Zhao, D.; Lam, H.; Peng, H.; Bao, S.; LeBlanc, D.; Nobukawa, K.; Pan, C. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques. IEEE Trans. Intell. Transp. Syst. 2017, 18, 595–607. [Google Scholar] [CrossRef] [PubMed]
- Althoff, M.; Lutz, S. Automatic generation of safety-critical test scenarios for collision avoidance of road vehicles. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1326–1333. [Google Scholar] [CrossRef]
- Klischat, M.; Althoff, M. Generating critical test scenarios for automated vehicles with evolutionary algorithms. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 2352–2358. [Google Scholar] [CrossRef]
- Beglerovic, H.; Stolz, M.; Horn, M. Testing of autonomous vehicles using surrogate models and stochastic optimization. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, R.; Sherony, R.; Gabler, H. Comparison of time to collision and enhanced time to collision at brake application during normal driving. In Proceedings of the SAE 2016 World Congress and Exhibition, Technical Paper 2016–01–1448, Detroit, MI, USA, 5 April 2016. [Google Scholar] [CrossRef]
- Mullins, G.; Stankiewicz, P.; Gupta, S. Automated generation of diverse and challenging scenarios for test and evaluation of autonomous vehicles. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 July 2017; pp. 1443–1450. [Google Scholar] [CrossRef]
- Mullins, G.; Dress, A.; Stankiewicz, P.; Appler, J.; Gupta, S. Accelerated testing and evaluation of autonomous vehicles via imitation learning. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Nitsche, P.; Thomas, P.; Stuetz, R.; Welsh, R. Pre-crash scenarios at road junctions: A clustering method for car crash data. Accid. Anal. Prev. 2017, 107, 137–151. [Google Scholar] [CrossRef] [PubMed]
- Gambi, A.; Huynh, T.; Fraser, F. Generating effective test cases for self-driving cars from police reports. In Proceedings of the 2019 27th ACM Joint Meeting on European Software Engineering Conference and Symposium on the Foundations of Software Engineering, Tallinn, Estonia, 12 August 2019; pp. 257–267. [Google Scholar] [CrossRef]
- Hauer, F.; Schmidt, T.; Holzmuller, B.; Pretschner, A. Did we test all scenarios for automated and autonomous driving systems? In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 2950–2955. [Google Scholar] [CrossRef]
- Ding, W.; Xu, M.; Zhao, D. Cmts: A conditional multiple trajectory synthesizer for generating safety-critical driving scenarios. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4314–4321. [Google Scholar] [CrossRef]
- Chen, J.; Shu, X.; Lan, F.; Wang, J. Construction of automatic driving test scenarios with typical dangerous accident characteristics. J. South China Univ. Technol. 2021, 49, 1–8. [Google Scholar] [CrossRef]
- Roesener, C.; Fahrenkrog, F.; Uhlig, A.; Eckstein, L. A scenario-based assessment approach for automated driving by using time series classification of human-driving behaviour. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1360–1365. [Google Scholar] [CrossRef]
- Pei, K.; Cao, Y.; Yang, J.; Jana, S. DeepXplore: Automated whitebox testing of deep learning systems. Commun. ACM 2019, 62, 137–145. [Google Scholar] [CrossRef]
- Tian, Y.; Pei, Y.; Jana, S.; Ray, B. DeepTest: Automated testing of deep-neural-network-driven autonomous cars. In Proceedings of the 40th International Conference on Software Engineering (ICSE), Gothenburg, Sweden, 27 May 2018; pp. 303–314. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, Y.; Zhang, L.; Liu, C.; Khurshid, S. DeepRoad: GAN-based metamorphic testing and input validation framework for autonomousdriving systems. In Proceedings of the 33rd ACM/IEEE International Conference on Automated Software Engineering (ASE), Montpellier, France, 3 September 2018; pp. 132–142. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.; Vora, S.; Liong, V.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. nuScenes: A Multimodal Dataset for Autonomous Driving. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11618–11628. [Google Scholar] [CrossRef]
- Gambi, A.; Nguyen, V.; Ahmed, J.; Fraser, G. Generating Critical Driving Scenarios from Accident Sketches. In Proceedings of the 2022 IEEE International Conference on Artificial Intelligence Testing (AITest), Newark, CA, USA, 15–18 August 2022; pp. 95–102. [Google Scholar] [CrossRef]
- Abdessalem, R.; Nejati, S.; Briand, L.; Stiffer, T. Testing vision-based control systems using learnable evolutionary algorithms. In Proceedings of the 40th IEEE/ACM International Conference on Software Engineering (ICSE), Gothenburg, Sweden, 27 May–3 June 2018; pp. 1016–1026. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, Y.; Zhang, T.; Wu, F.; Liu, Y.; Wang, G. Systematic Testing of Autonomous Driving Systems Using Map Topology-Based Scenario Classification. In Proceedings of the 2021 36th IEEE/ACM International Conference on Automated Software Engineering (ASE), Melbourne, Australia, 15–19 November 2021; pp. 1342–1346. [Google Scholar] [CrossRef]
- Lee, S.; Cha, S.; Lee, D.; Oh, H. Effective white-box testing of deep neural networks with adaptive neuron-selection strategy. In Proceedings of the 29th ACM SIGSOFT International Symposium on Software Testing and Analysis, Virtual Event, 18 July 2020; pp. 165–176. [Google Scholar] [CrossRef]
- Schultz, A.; Grefenstette, J.; De Jong, K. Adaptive testing of controllers for autonomous vehicles. In Proceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology, Washington, DC, USA, 2–3 June 1992; pp. 158–164. [Google Scholar] [CrossRef]
- Rocklage, E.; Kraft, H.; Karatas, A.; Seewig, J. Automated Scenario Generation for Regression Testing of Autonomous Vehicles. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 476–483. [Google Scholar] [CrossRef]
- Fremont, D.; Kim, E.; Pant, Y.; Seshia, S.; Acharya, A. Formal Scenario-Based Testing of Autonomous Vehicles: From Simulation to the Real World. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Tuncali, C.; Pavlic, T.; Fainekos, G. Utilizing S-TaLiRo As an Automatic Test Generation Framework for Autonomous Vehicles. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1470–1475. [Google Scholar] [CrossRef]
- Klischat, M.; Althoff, M. A Multi-Step Approach to Accelerate the Computation of Reachable Sets for Road Vehicles. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Zhong, Z.; Kaiser, G.; Ray, B. Neural network guided evolutionary fuzzing for finding traffic violations of autonomous vehicles. IEEE Trans. Softw. Eng. 2022, 49, 1860–1875. [Google Scholar] [CrossRef]
- Abdessalem, B.; Panichella, A.; Nejati, S.; Briand, L.; Stiffer, T. Testing autonomous cars for feature interaction failures using many-objective search. In Proceedings of the 33rd IEEE/ACM International Conference on Automated Software Engineering (ASE), Montpellier, France, 3–7 September 2018; pp. 143–154. [Google Scholar] [CrossRef]
- Tian, H.; Jiang, Y.; Wu, G.; Yan, J.; Wei, J.; Chen, W.; Li, S. MOSAT: Finding safety violations of autonomous driving systems using multi-objective genetic algorithm. In Proceedings of the 30th ACM Joint European Software Engineering Conference and Symposium on the Foundations of Software Engineering, Singapore, 14–18 November 2022; pp. 94–106. [Google Scholar] [CrossRef]
- Gambi, A.; Mueller, M.; Fraser, G. Automatically testing self-driving cars with search-based procedural content generation. In Proceedings of the 28th ACM SIGSOFT International Symposium on Software Testing and Analysis, Beijing, China, 15–19 July 2019; pp. 318–328. [Google Scholar] [CrossRef]
- Haq, F.U.; Shin, D.; Briand, L. Efficient online testing for DNN-enabled systems using surrogate-assisted and many-objective optimization. In Proceedings of the 44th International Conference on Software Engineering, Pittsburgh, PA, USA, 25–27 May 2022; pp. 811–822. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving. Transp. Res. Part C Emerg. Technol. 2020, 117, 102662. [Google Scholar] [CrossRef]
- Tuncali, C.; Fainekos, G.; Prokhorov, D.; Ito, H.; Kapinski, J. Requirements-driven test generation for autonomous vehicles with machine learning components. IEEE Trans. Intell. Veh. 2020, 5, 265–280. [Google Scholar] [CrossRef]
- Zhong, Z.; Tang, Y.; Zhou, Y.; Neves, V.; Liu, Y.; Ray, B. A Survey on Scenario-Based Testing for Automated Driving Systems in High-Fidelity Simulation. arXiv 2021, arXiv:2112.00964. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, X.; Arcaini, P.; Jin, Z.; Zhao, H.; Ishikawa, F.; Wu, R.; Xie, T. Targeting Requirements Violations of Autonomous Driving Systems by Dynamic Evolutionary Search. In Proceedings of the 2021 36th IEEE/ACM International Conference on Automated Software Engineering (ASE), Melbourne, Australia, 15–19 November 2021; pp. 279–291. [Google Scholar] [CrossRef]
- Tang, Y.; Zhou, Y.; Wu, F.; Liu, Y.; Sun, J.; Huang, W.; Wang, G. Route coverage testing for autonomous vehicles via map modeling. In Proceedings of the 2021 IEEE International Conference on Robotics Automation(ICRA), Xi’an, China, 30 May–5 June 2021; pp. 11450–11456. [Google Scholar] [CrossRef]
- Xia, C.; Huang, S.; Zheng, C.Y.; Zhang, Q.; Wang, Y.; Wei, Y. Modeling and verification method of intersection test scenario for automatic driving. J. Softw. 2023, 34, 3002–3021. [Google Scholar] [CrossRef]
- Murata, T. Petri Nets: Properties, Analysis and Applications. Proc. IEEE 1989, 77, 541–580. [Google Scholar] [CrossRef]
- Li, G.; Li, Y.; Jha, S.; Tsai, T.; Sullivan, M.; Kalbarczyk, Z.; Iyer, R. AV-FUZZER: Finding Safety Violations in Autonomous Driving Systems. In Proceedings of the 2020 IEEE 31st International Symposium on Software Reliability Engineering (ISSRE), Coimbra, Portugal, 12–15 October 2020; pp. 25–36. [Google Scholar] [CrossRef]
- Feng, S.; Feng, Y.; Sun, H.; Bao, S.; Zhang, Y.; Liu, H. Testing Scenario Library Generation for Connected and Automated Vehicles, Part II: Case Studies. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5635–5647. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Meaning | Example |
|---|---|---|
| The occurrence of strictly precedes the occurrence of . | For = “Following” and = “Overtaking”, then . | |
| If either or occurs, then s occurs. | For = “Lane changing”, = “changing_left”, = “changing_right”, then . | |
| If both and occur, then s occurs. | For = “Roundabout”, = “roundabout_entering”, = “roundabout_exiting”, then . |
| Scenario | Consistency | Boundary | Correctness | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 30 | 40 | 50 | Activity | Boundness | Reachability | |||||
| Result | Time(s) | Result | Time(s) | Result | Time(s) | |||||
| Cruising | satisfiability | √ | 293.92 | √ | 921.57 | √ | 1681.23 | √ | √ | √ |
| deadlock | ⅹ | 352.36 | ⅹ | 961.54 | ⅹ | 1548.41 | ||||
| Lane changing | satisfiability | √ | 14.46 | √ | 39.17 | √ | 97.16 | |||
| deadlock | ⅹ | 22.89 | ⅹ | 80.44 | ⅹ | 153.34 | ||||
| Overtaking | satisfiability | √ | 34.47 | √ | 70.17 | √ | 151.68 | |||
| deadlock | ⅹ | 41.95 | ⅹ | 123.83 | ⅹ | 255.47 | ||||
| Following | satisfiability | √ | 94.82 | √ | 219.52 | √ | 529.25 | |||
| deadlock | ⅹ | 122.62 | ⅹ | 264.97 | ⅹ | 652.67 | ||||
| Parking | satisfiability | √ | 19.70 | √ | 44.72 | √ | 167.63 | |||
| deadlock | ⅹ | 23.27 | ⅹ | 56.21 | ⅹ | 204.49 | ||||
| Describe | LTL Formula | Result | |
|---|---|---|---|
| Cruising | If encountering a stationary obstacle, then maneuver to avoid it. | G((px21_obstacle)→(X((px23_change.left)∨(px24_change.right)))) | √ |
| If encountering pedestrians crossing at a crosswalk, then yield to the pedestrians. | G((px62_mark)→(X(px65_stop))) | √ | |
| If encountering fire vehicles, then let the fire vehicles. | G((px81_truck)→(X(px83_slow))) | √ | |
| Lane changing | If traveling in the current lane, then maintain a safe distance from the longitudinal target vehicle 2 and the lateral target vehicle 3. | G((pb02_driving)→(F((pb03_distance2.safe)∧(pb04_distance3.safe)))) | √ |
| If the relative distance to the target vehicle is greater than the longitudinal and transverse safe lane change distance, then change the lane | G(((pb09_distance.vertical)∧(pb10_distance.horizontal))→(F(pb1_change))) | √ | |
| Overtaking | If following another vehicle, then maintain a safe lane-changing distance. | G((pc02_travel.follow)→(F(pc08_change.safe))) | √ |
| If there is a safe lane-changing distance, then overtake the target vehicle on the left. | G((pc08_change.safe)→(X(pc09_overtake.left))) | √ | |
| Following | If the followed target vehicle 1 changes lanes, then adjust the speed to follow target vehicle 2. | G((pg21_near.target1)→(F(pg24_follow.target2))) | √ |
| If approaching target vehicle 2 and target vehicle 1 changes lanes, then follow target vehicle 1. | G((pg31_near.target2)→F(pg34_follow.target1))) | √ | |
| Parking | If there is a safe lane-changing distance and the speed limit requirements are met, then change to the right lane and decelerate. | G(((pt12_adjust.speed)∧(pt13_change.distance))→(X(pt16_go.right))) | √ |
| If there is a safe lane-changing distance and the speed limit requirements are met, then change to the emergency lane and decelerate. | G(((pt22_adjust.speed)∧(pt23_change.distance))→(X(pt25_go.emergency))) | √ |
| Random | AV-Fuzzer | TraModeAVTest | |
|---|---|---|---|
| Total number of test cases | 437 | 392 | 384 |
| Number of test cases for the violation scenarios | 113 | 96 | 125 |
| Number of types of violation scenarios | 4 | 3 | 5 |
| Average time for each violation scenario | 2.5 h | 3.3 h | 2.0 h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, C.; Huang, S.; Zheng, C.; Yang, Z.; Bai, T.; Sun, L. TraModeAVTest: Modeling Scenario and Violation Testing for Autonomous Driving Systems Based on Traffic Regulations. Electronics 2024, 13, 1197. https://doi.org/10.3390/electronics13071197
Xia C, Huang S, Zheng C, Yang Z, Bai T, Sun L. TraModeAVTest: Modeling Scenario and Violation Testing for Autonomous Driving Systems Based on Traffic Regulations. Electronics. 2024; 13(7):1197. https://doi.org/10.3390/electronics13071197
Chicago/Turabian StyleXia, Chunyan, Song Huang, Changyou Zheng, Zhen Yang, Tongtong Bai, and Lele Sun. 2024. "TraModeAVTest: Modeling Scenario and Violation Testing for Autonomous Driving Systems Based on Traffic Regulations" Electronics 13, no. 7: 1197. https://doi.org/10.3390/electronics13071197
APA StyleXia, C., Huang, S., Zheng, C., Yang, Z., Bai, T., & Sun, L. (2024). TraModeAVTest: Modeling Scenario and Violation Testing for Autonomous Driving Systems Based on Traffic Regulations. Electronics, 13(7), 1197. https://doi.org/10.3390/electronics13071197