1. Introduction
Demanding specifications for capacity enhancement and low power consumption in antenna hardware components have been placed on sixth generation (6G) wireless communication [
1]. Traditional phase-shifting circuits have been widely used to improve wireless communication systems’ performance, but they need a large investment in phase shifters and reflecting materials. Conventional phase-shifting arrays cannot keep up with the exponential growth in communication demands [
2].
Currently, to create an intelligent and reconfigurable communication system, intelligent reflective surfaces (RISs) are frequently employed in the field of wireless communication [
3,
4,
5,
6,
7]. A vast array of passive reflective metamaterials make up RISs. To enhance system efficiency, they are frequently utilized as relays in wireless communication systems because of their reflecting qualities and reconfigurable benefits. Furthermore, RISs have been thoroughly studied in the area of physical layer security [
8,
9,
10], where they can be used to optimize both RIS reflection beamforming and base station (BS) transmit beamforming in tandem to increase the secrecy rate.
In addition to RIS, the current holographic antenna is a planar antenna that is incredibly thin, consumes very little power, and is capable of multi-beam steering. By creating a holographic pattern on the surface by the interference principle, the holographic antenna records the interference between the reference wave and the desired object wave [
11]. The goal of beamforming is accomplished when the holographic pattern creates the required radiation pattern when the reference wave propagates on the surface. The radiation pattern is fixed when the holographic pattern is formed, which is a flaw in the standard holographic antenna. Thankfully, this flaw has been overcome by the reconfigurable holographic surface (RHS) composed of controlled metamaterials [
12].
The RHS is a compact and energy-efficient planar antenna composed of metamaterial radiation elements. The RHS can perform dynamic beamforming because the magnetic or electric bias field can intelligently modulate the electromagnetic response of the metamaterial radiation elements. Unlike traditional phased arrays, RHS produces the required radiation pattern by adjusting the reference wave’s radiation amplitude, doing away with the requirement for intricate phase-shifting linkages [
13].
The RHS and the RIS, employing traditional phased arrays technology, exhibit significant differences in both structure and operation. The RHS seamlessly integrates its RF front end into a PCB, facilitating transceiver implementation, while the RIS, employing traditional phased-array technology, relies on an external front end, necessitating a control link for phase-shift reconstruction. In terms of functionality, the RHS acts as a leaky-wave antenna, sequentially exciting radiation elements, whereas the RIS functions as a reflection antenna, simultaneously exciting all elements. Notably, the RHS excels as a transmit–receive antenna for mobile platforms, while the RIS finds common usage as a passive relay to extend cell coverage [
14].
RHS has garnered attention because of its exceptional qualities. In the literature, people mainly investigate the hardware production [
15,
16] and radiation pattern control of the RHS [
13,
17]. In [
16], the radiation elements of the holographic surface are fabricated with a complementary electric-LC (cELC) resonator connected to a p-i-n diode. When the diode is in the off state, it will excite the reference wave into the object wave propagating in free space, and when the diode is on, it will be difficult to excite energy into the free space. In [
17], the author established a multi-user communication system assisted by the RHS. By using holographic technology, holographic beamforming was performed by the RHS, and a hybrid beamforming scheme was proposed to improve the communication rate.
People have studied the system performance of the RHS because of its precise beam steering capability and used it in multiple-access, multi-user communication; low-Earth-orbit (LEO) satellite communication; and other applications [
18,
19,
20]. Recently, in [
21], the author developed a point-to-point real-time data transmission platform to confirm the system’s functionality and deployed the holographic surface in the radio field to actualize the holographic radio. It is evident from the experimental results that the holographic surface has a lot of potential for holographic radio. Previous scholarly research indicates that the holographic surface performs exceptionally well in enhancing communication system performance; nevertheless, research on secrecy communication has not yet been taken into consideration from the standpoint of physical layer security.
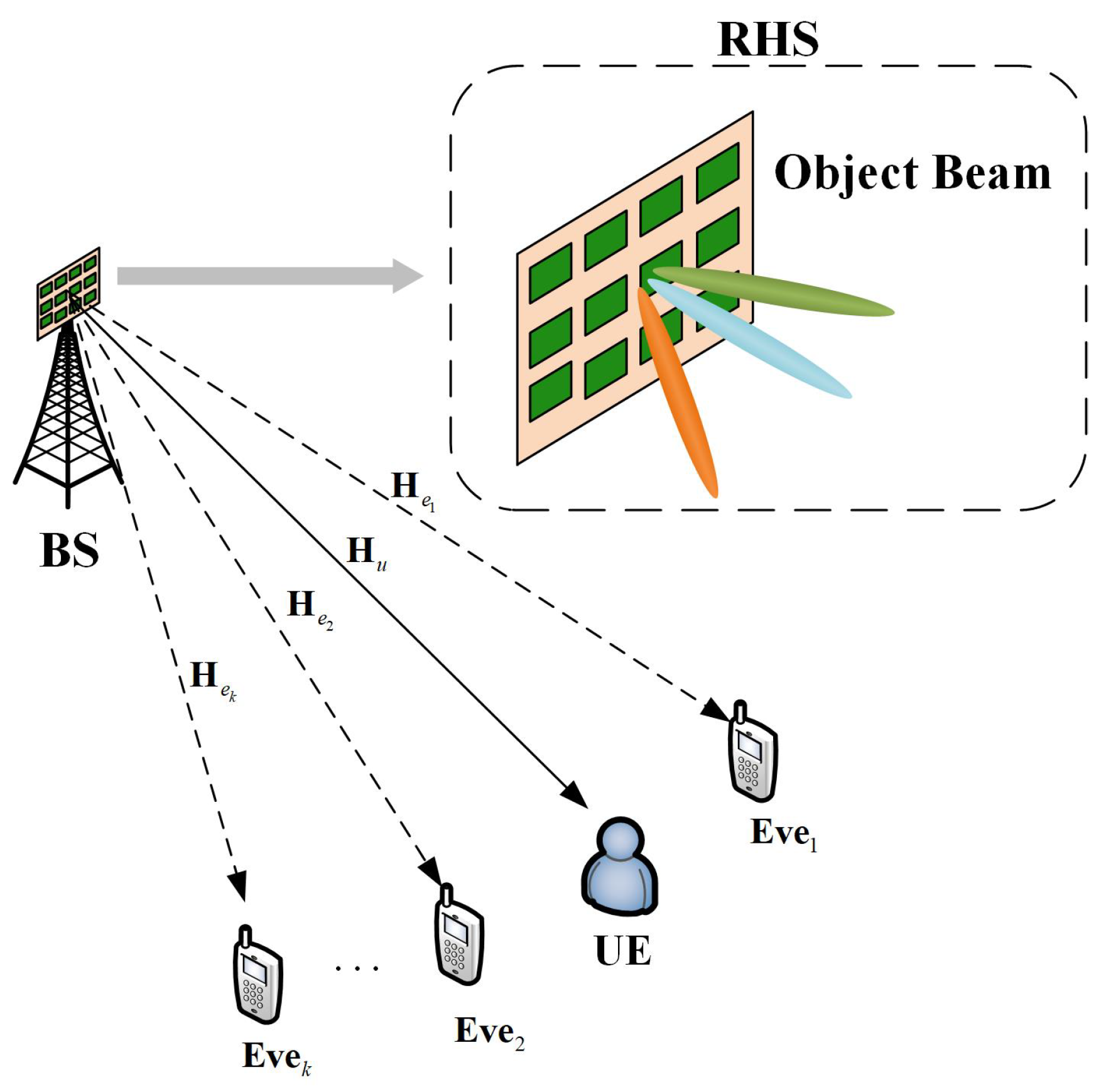
In addition to proposing artificial noise (AN), an efficient method for raising the secrecy rate in traditional wireless communication systems, this work is the first to examine a secrecy communication system aided by the RHS. We added an RHS to the base station (BS), as depicted in
Figure 1, to help boost the secrecy rate of legal receivers with many eavesdroppers. To address this problem, we introduce a unique hybrid beamforming method that simultaneously maximizes the secrecy rate by optimizing the holographic beamforming of the RHS and the digital beamforming of the BS. This problem is a complex-domain optimization problem subject to the real-domain amplitude constraints, which makes it different from the standard RIS-aided secrecy communication system [
22]. As a result, the conventional approach does not perform well in solving this problem. New approaches are required to address this issue.
To solve the physical layer security problem of maximizing the secrecy rate, our contributions in this paper can be summarized as follows:
We propose a secrecy communication system assisted by RHS. Specifically, we integrate the RHS into the base station (BS) to enhance the system’s beamforming accuracy and introduce artificial noise, a commonly used technique in the domain of physical layer security, to improve the overall secrecy rate. The system is designed to operate in the presence of multiple eavesdroppers and a legitimate user. To address this challenge, we propose a hybrid beamforming scheme that jointly optimizes the digital beamforming at the BS and the holographic beamforming at the RHS.
We formulate a secrecy rate maximization problem subject to the transmit power of the base station and the normalized radiation amplitude of the holographic surface. This problem is difficult to solve because it is an optimization problem in which the objective function is non-convex and the optimization variables are coupled. However, it is relatively easy to optimize one optimization variable while the other optimization variable is fixed, so we propose an algorithm of an alternate solution. We decompose the problem into two subproblems: the digital beamforming at the base station and the holographic beamforming at the holographic surface. By alternately solving the two subproblems, convergence will be achieved in the end to maximize the secrecy rate.
Based on simulation results, it is demonstrated that the holographic surface presents promising potential for applications in the field of physical layer security. The simulations have verified the impact of transmission power, eavesdropper quantity, and antenna size on its performance. Additionally, a comparison with an equivalent-sized RIS has been conducted. The simulation results reveal that the holographic surface outperforms the RIS in terms of secrecy of the communication system.
The remainder of this paper is organized as follows. The holographic rules and the hardware construction of the holographic surface are presented in
Section 2. We present our scenario and system model for our secrecy communication system in
Section 3. In
Section 4, we pose the problem of optimizing the secrecy rate and provide a detailed description of the algorithm used to solve it. To verify the algorithm’s viability and the holographic surface’s functionality in the secrecy communication system, we simulate the system model in
Section 5. Ultimately, our conclusions are presented in
Section 6.
Notations: is the imaginary unit, and denotes the conjugate. represents the modulus of a complex number, while represents the real part of a complex number. denotes the distribution of a circularly symmetric complex Gaussian random variable with mean and variance . denotes the trace of the square matrix M, while denotes it to be positive semi-definite. denotes the rank of any general matrix , and represents the diagonalization. denotes the space of complex-valued matrices.
4. Problem Formulation and Algorithm Design
4.1. Problem Formulation
We aim to maximize the achievable secrecy rate by optimizing digital beamformer
and holographic beamformer
, subject to the maximum power constraint at BS. The problem can be formulated as
Since both and are non-concave functions as well as the coupled optimization variables, is difficult to solve, but we find that when one of or is fixed, it will be easy to solve, so we propose an optimization method based on an alternating algorithm. By alternately optimizing one of or while the other is fixed at each iteration, convergence is finally achieved through multiple iterations. Therefore, in order to effectively solve , we decompose it into two subproblems, i.e., digital beamforming to optimize and holographic beamforming to optimize . By iteratively solving these two subproblems, we can eventually solve sub-optimally. Different from the traditional phase-controlled beamforming design, is a complex-domain optimization problem subject to nontraditional real-domain constraints. The traditional algorithm is no longer applicable here. For the optimization problem of , we use the traversal approach to approximate solving. In the next two subsections, we will solve these two subproblems.
4.2. Digital Beamforming Design
In this section, we optimize the digital beamforming vectors
given the holographic beamforming vector
. Let
and
, and then we denote
and
. Therefore,
can be transformed to
Note that
and
. We define two matrices
and
, and then it follows that
and
. Since the rank-1 constraint is a non-convex constraint, we use the semidefinite relaxation (SDR) method to remove this constraint. Then, the
can be transformed to
where
is the feasible set for
. This problem is still difficult to solve because the objective function is not jointly concave with respect to
. In order to overcome this problem, we propose the following Lemma 1 [
23].
Lemma 1. Consider the function , for any , then we havethe optimal solution is . The upper bound for
can be given by Lemma 1. By setting
and
as well as applying Lemma 1, we have
where
. This function is jointly concave with respect to
.
In the same way, letting
and
, then the
can be expressed as
where
. This function is jointly convex with respect to
. By applying Lemma 1 to construct (
14) and(
16), and following Sion’s minimax theorem [
24], (P1.2) can be transformed to
Constant “” is omitted, which does not influence the optimal solution. It is obvious that the objective function of (P1.3) is convex with respect to either or . Therefore, we can solve (P1.3) by applying the iterative algorithm.
According to Lemma 1, we can easily get the closed-form optimal solution of
for the given
:
For the given
, we can obtain the optimal solution of
by solving the following problem:
Here, we introduce the slack variable
, so the problem can be rewritten as
where
is a concave function, and
is a convex function, so the objective function is concave, and the constraints are convex. Therefore, (P1.5) is a convex problem, and we can solve it using a convex optimization tool such as CVX. If the obtained
and
are rank-1 matrices, we can write them in the form of
,
by applying eigenvalue decomposition. But the
and
cannot be guaranteed to be of rank-1, because we apply semidefinite relaxation (SDR), dropping the constraint of rank-1. If
and
are not of rank-1, the approximate solution to
and
can be obtained by using the Gaussian randomization method. Thus, (P1.1) can be solved by alternately updating
and
.
4.3. Holographic Beamforming Design
After obtaining the digital beamforming vectors
, we let
and
; thus, (P0) can be simplified as follows:
Note that (P2.1) is a complex-domain optimization problem, but the constraints are unconventional real-domain constraints. Using traditional solving methods such as SDR is not very effective. We use a traversal method to achieve an approximate solution. We traverse each element of at an interval of 0.25 and obtain an optimal solution after traversing all the situations. Then, we use this optimal solution as the approximate solution to (P2.1).
4.4. Overall Algorithm
In order to better summarize the overall algorithm process, we present the overall algorithm steps in Algorithm 1. Based on the algorithm for solving two subproblems, we solve (P0) in an iterative manner. In each iteration, the two subproblems are solved alternately. The iterations are completed when the value difference of the security rate obtained in two adjacent iterations is less than a threshold of
.
| Algorithm 1 Hybrid Beamforming Design |
Input:
Output: Initialize and set repeat Step 1: solve (P1.1) for given and denote the obtained solution as ; Step 2: solve (P2.1) for given and denote the obtained solution as ; Step 3: set ; until Covergence or return
|
5. Simulation Results
In this section, we evaluate the performance of the hybrid beamforming scheme proposed for an RHS-aided secrecy communication system through simulation results. The simulation parameters are set as follows. The element spacing of the RHS
and
are set as 0.25 cm. The carrier frequency
f is 30 GHz, and the propagation vector on the RHS
, i.e.,
. The height of the BS is set as 50 m. The number of each user’s receive antennas
, as well as the noise density
= −174 dBm/Hz. We set the propagation environment between the BS and receivers as a millimeter-wave channel with
I paths (we set it as one line-of-sight path and one none-line-of-sight path for simplicity). So, the the channel is denoted as
where
is the complex gain of the
i-th path;
and
are the angle of receive and transmit, respectively; and
and
are the antenna array response vectors at the receiver and transmitter [
25].
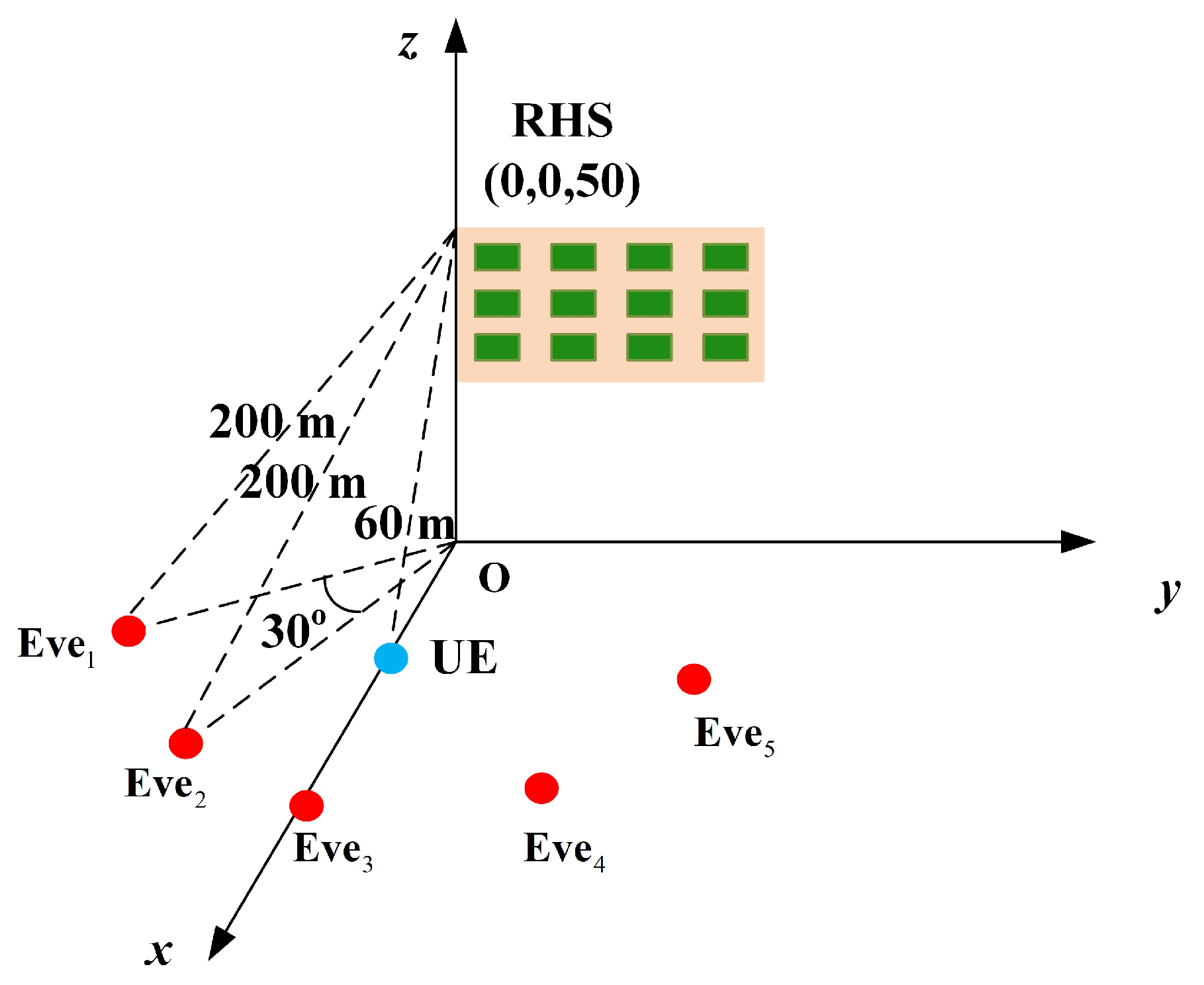
The simulation setup is depicted in
Figure 3. It is assumed that the RHS is located at (0,0,50) in meters (m). UE is located on the x-axis and is 60 m away from the RHS. Five eavesdroppers are strategically deployed within the domain, with their distances from the RHS uniformly set at 200 m. The difference between the
of each eavesdropper is
, and they are symmetrically distributed around the UE with respect to the x-axis.
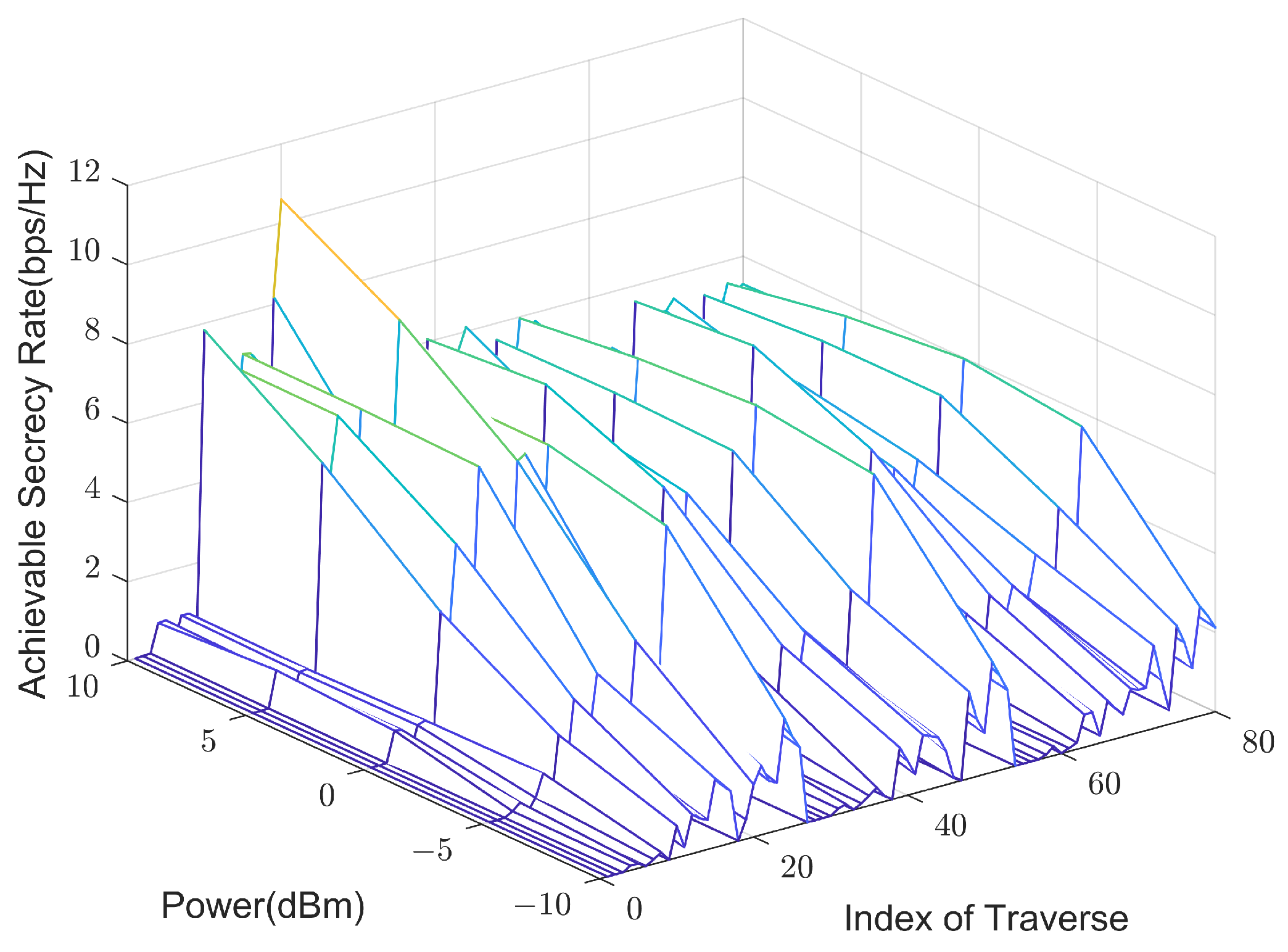
As illustrated in
Figure 4, we traverse
at an interval of 0.5. It can be seen that different values of
influence the secrecy rate. There is a big difference in the influence of
when the power is low or high. In instances of low power, the BS digital beamforming signal is slight, and optimizing
primarily aims to increase the noise experienced by potential eavesdroppers. Conversely, at high power, the primary objective of
optimization is to enhance receiver rates. The observed curve in the figure generally indicates that secrecy rates ascend with increased power, aligning with expected outcomes.
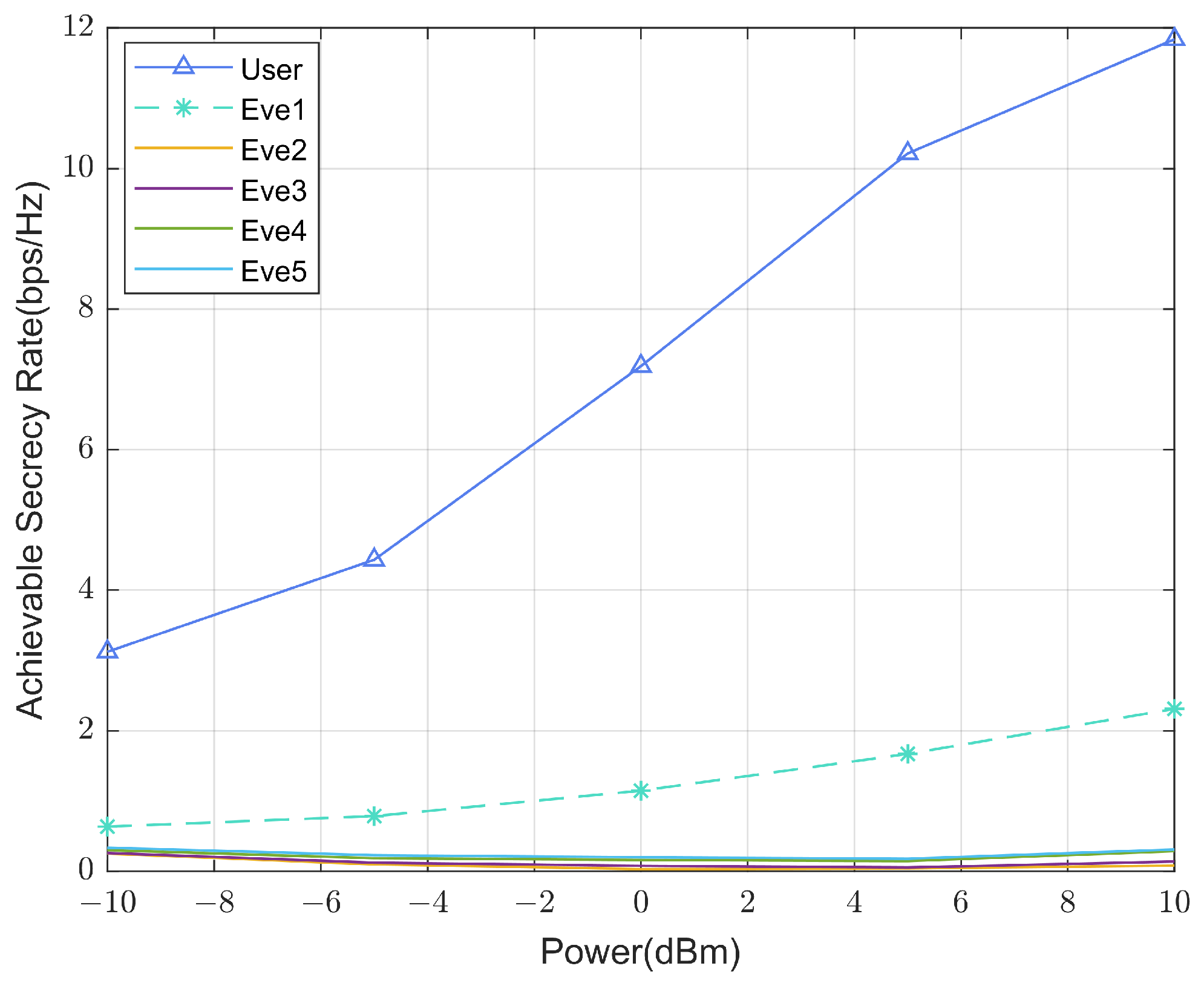
Figure 5 illustrates the communication rate of UE and Eves versus the power of the BS. It can be seen that, as the power increases, the user’s rate increases, while the eavesdropper’s rate is well suppressed. However, it is worth emphasizing that Eve1’s eavesdropping rate exhibits a higher value than the other eavesdroppers. This rate amplifies with the increase in power, which is attributed to the influence of sidelobes. RHS will generate some sidelobes when performing beamforming, and the position of Eve1 is just in the direction of sidelobe propagation, so the suppression effect of RHS on Eve1 is not as pronounced as on the other eavesdroppers.
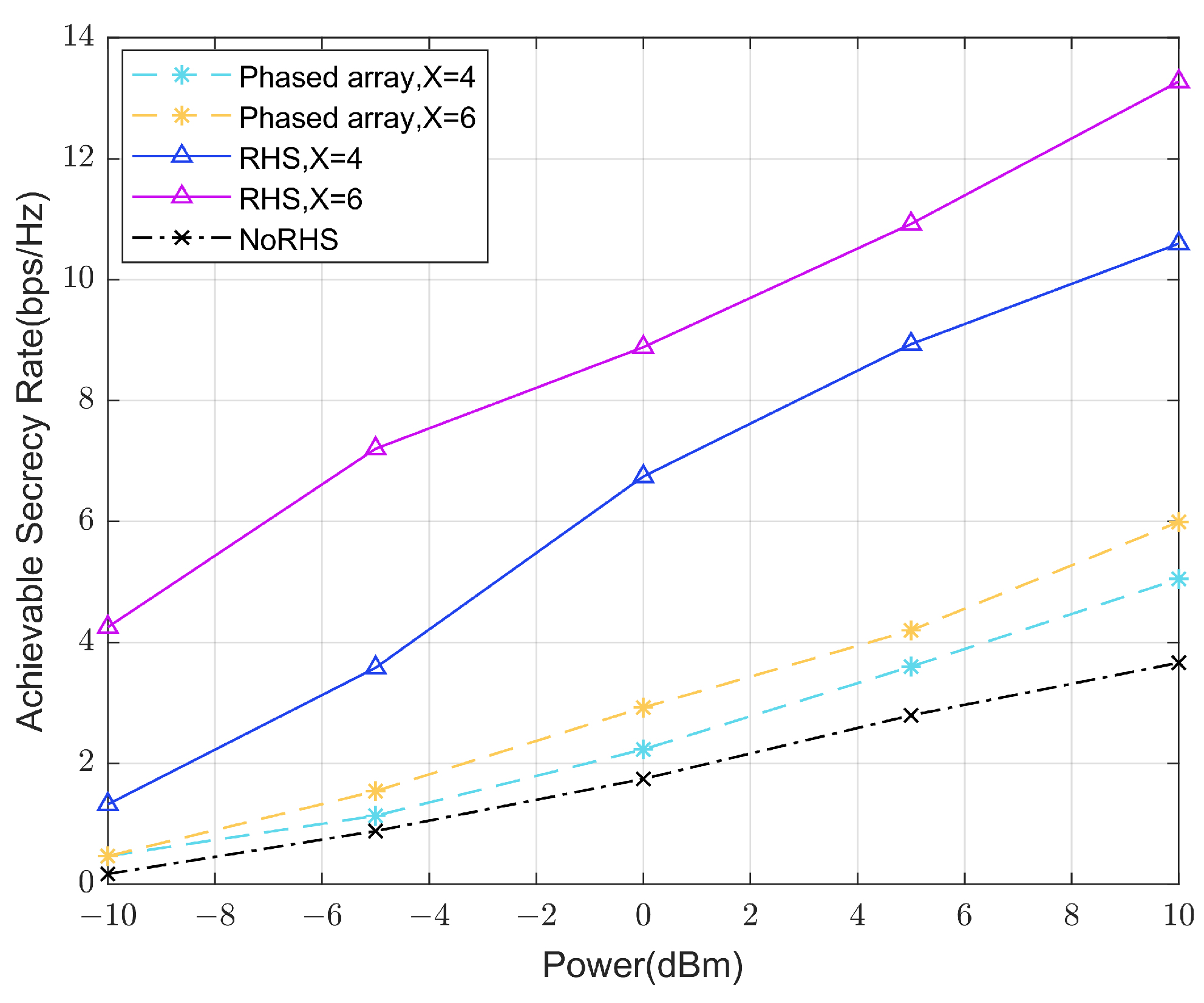
Figure 6 illustrates the secrecy rate versus the power of the BS. It can be seen that, with the increase in the transmit power, the secrecy rate is increasing. In order to show the performance of the holographic surface in secrecy communication, we have also simulated the traditional phased array and the situation without RHS. It can be seen that the communication performance of RHS is better than that of the phased array, reflecting the excellent performance of the holographic surface in terms of beamforming. We compared the effects of surfaces with different numbers of radiation elements, and we can see that the surface with more radiation elements has a higher secrecy rate because the higher spatial DoF makes the suppression effect on eavesdroppers better.
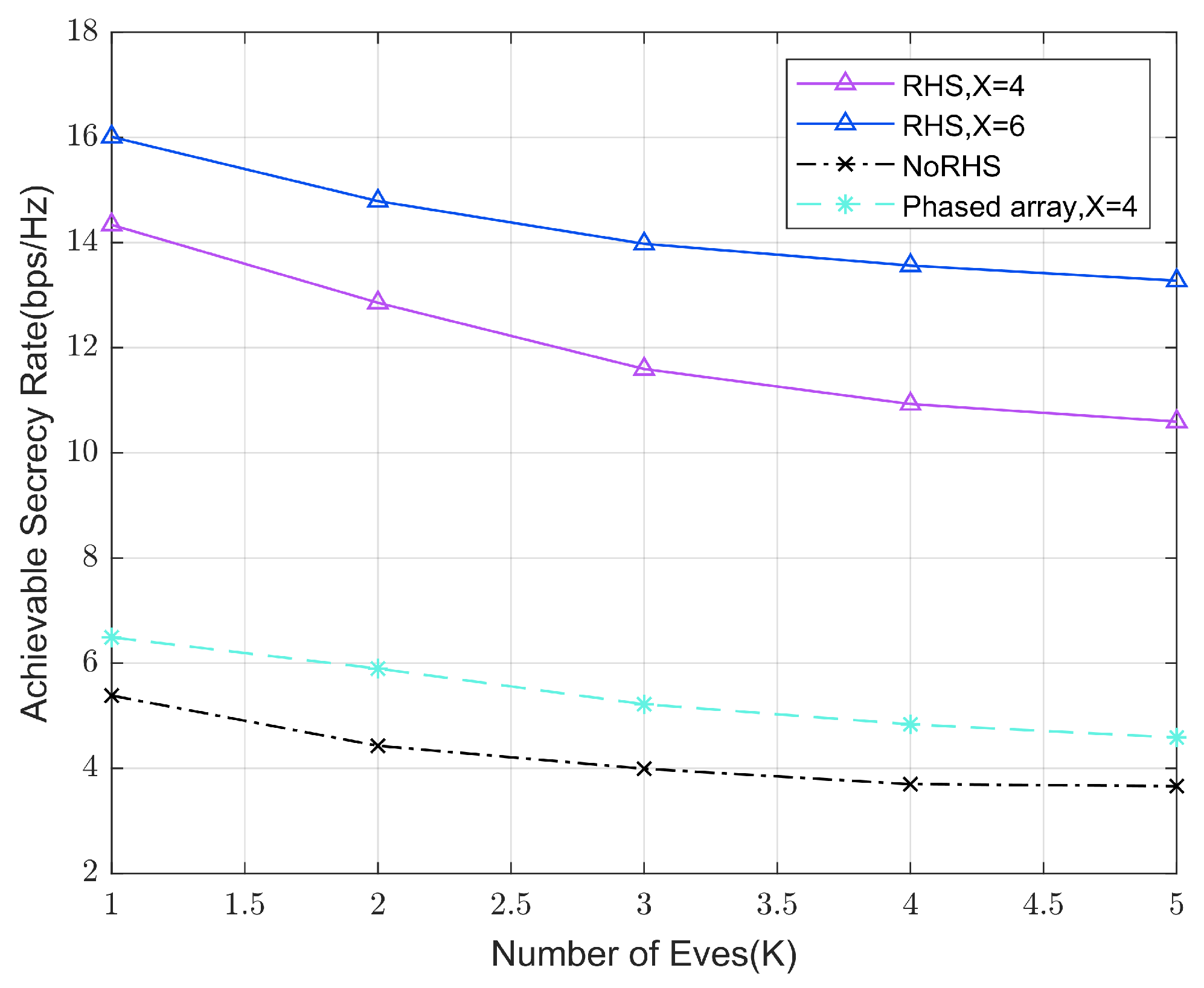
Figure 7 illustrates the secrecy rate versus the number of Eves. We set
as 10 dBm. It is observable that the rate of decline is more rapid with a smaller number of Eves, and the decline will slow down when the number of Eves is large. The fundamental reason behind this phenomenon is that, when the number of Eves is small, the spatial DoF of the holographic surface plays a greater role, but as the number of Eves increases, there is a lack of sufficient spatial DoF, and artificial noise plays a major role. At first, there is a reduction in spatial DoF, and then there is a reduction only in the allocated power for each eavesdropper suppression.
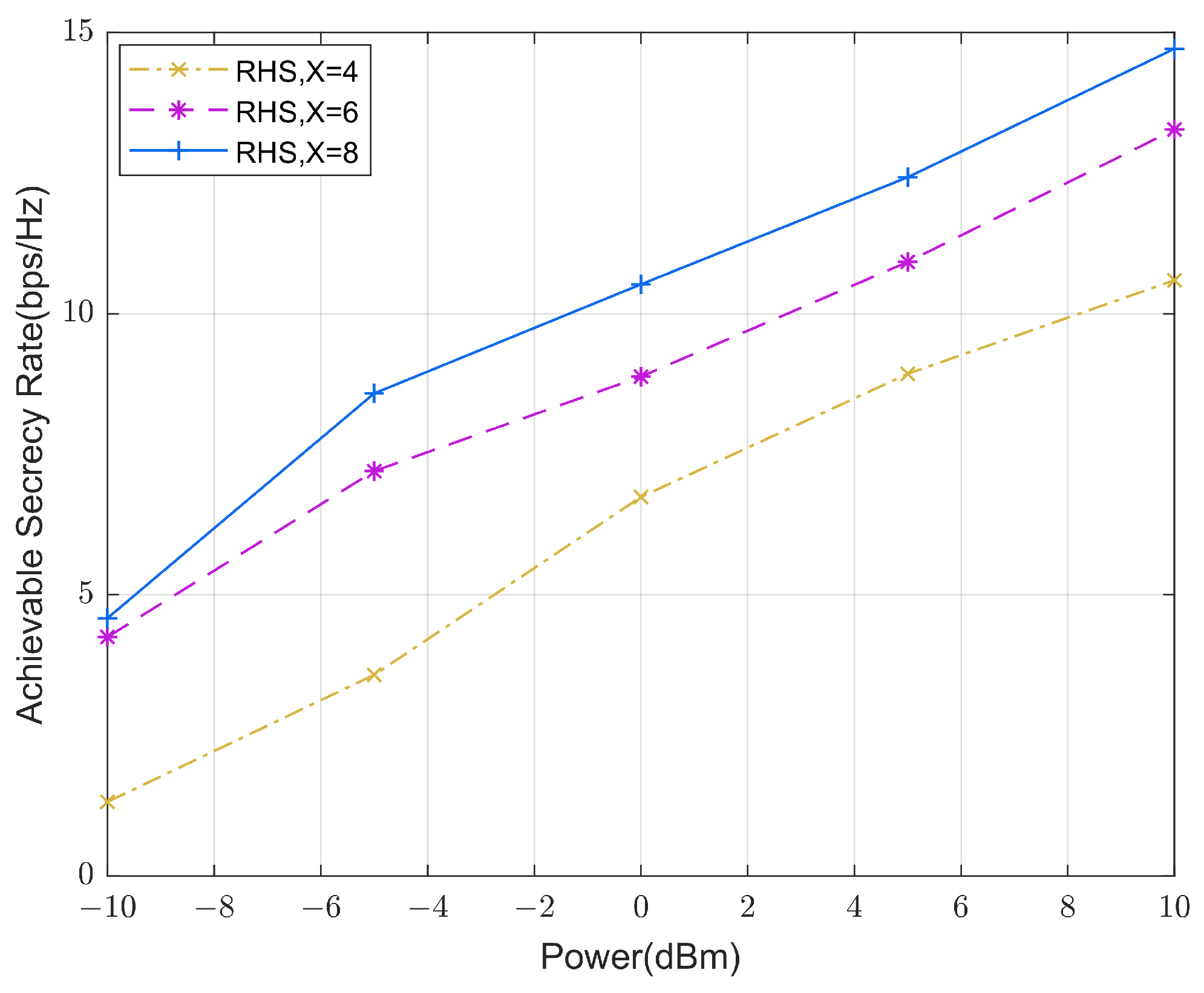
Figure 8 illustrates the secrecy rate of the RHS with different sizes versus the power of the BS. The observation can be made that a greater number of radiation elements on the holographic surface will result in a higher secrecy rate. This is expected since the Dof of the RHS will be higher with more radiation elements on the RHS; thus, the suppression against eavesdroppers will be higher. Note that, when the power is low, the secrecy rate gap between different size RHSs is different from when the power is high. This can be attributed to the fact that, at low power levels, the primary aim of beamforming is to mitigate the eavesdropper’s eavesdropping rate. When the number of radiation elements is limited to four (resulting in a low Dof on the RHS), the effectiveness of eavesdropper suppression is limited, so it is obviously lower than the secrecy rate when the size is larger. When the power is higher, the main goal is to increase the communication rate of the receiver. The drawback of low DoF at smaller sizes is alleviated by power distribution.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







