

Concurrent Learning-Based Two-Stage Predefined-Time System Identification


Abstract
1. Introduction
2. Problem Formulation and Preliminaries
3. Predefined-Time System Identification via Concurrent Learning
3.1. Regressor Filtering and System Normalization
3.2. Historic Data Storage
3.3. Predefined-Time Update Law Design and Analysis
4. Numerical Simulation
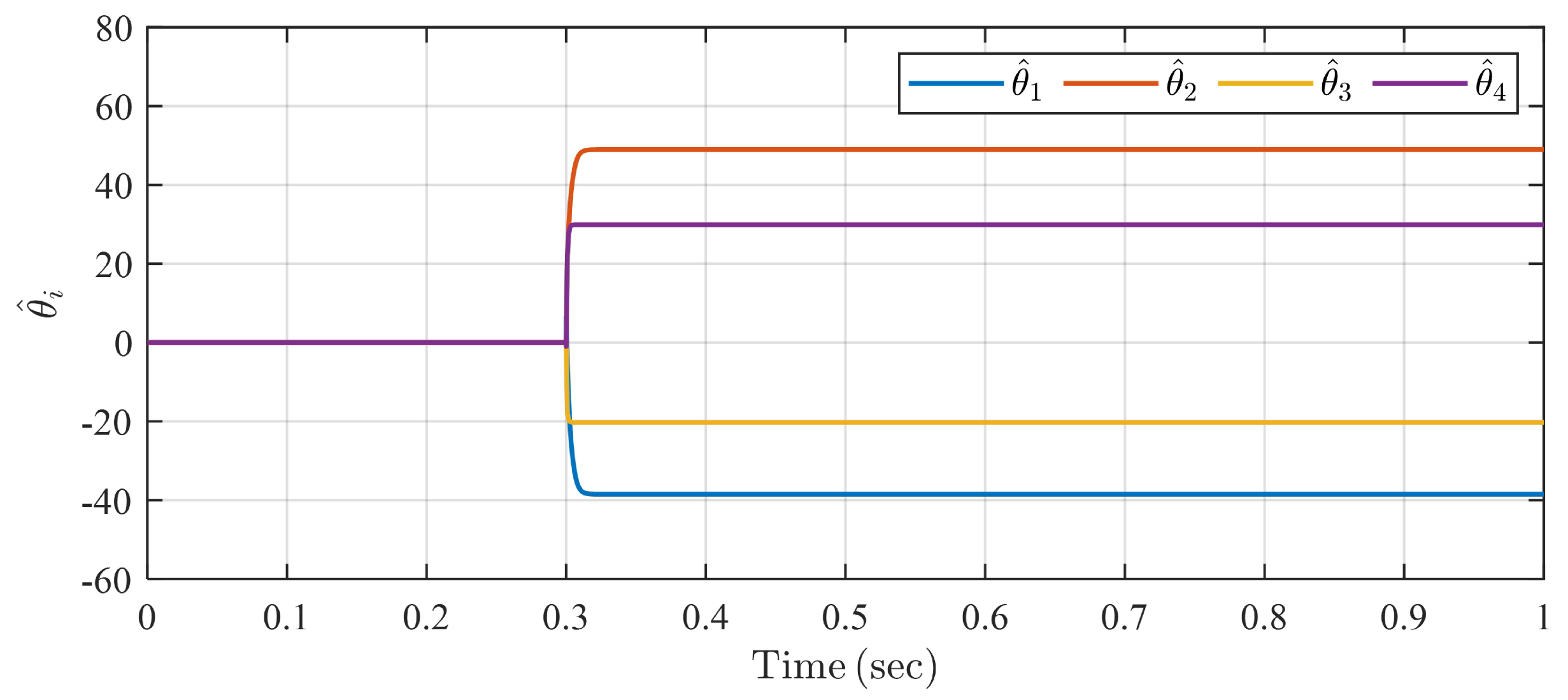
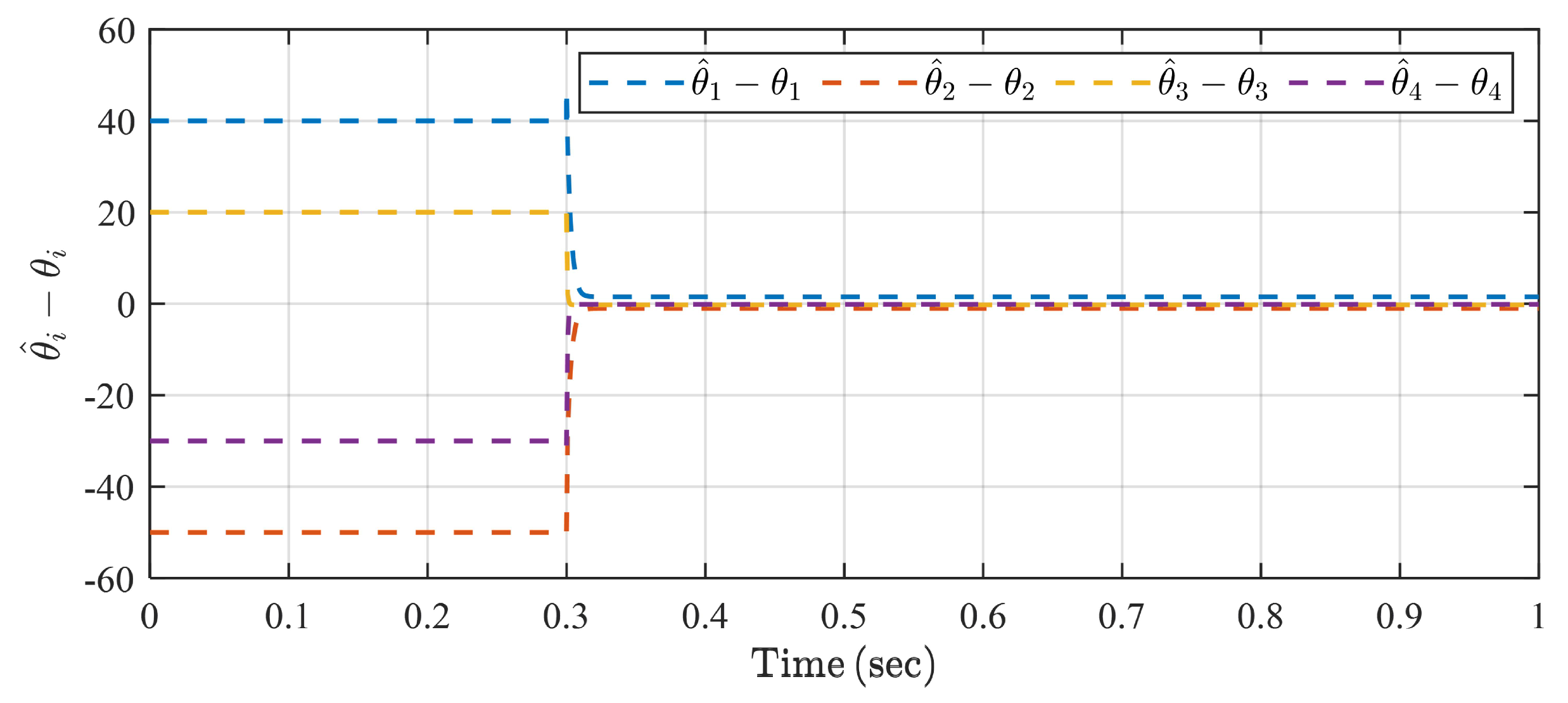
4.1. Simulation of Identification Algorithm without NNAE
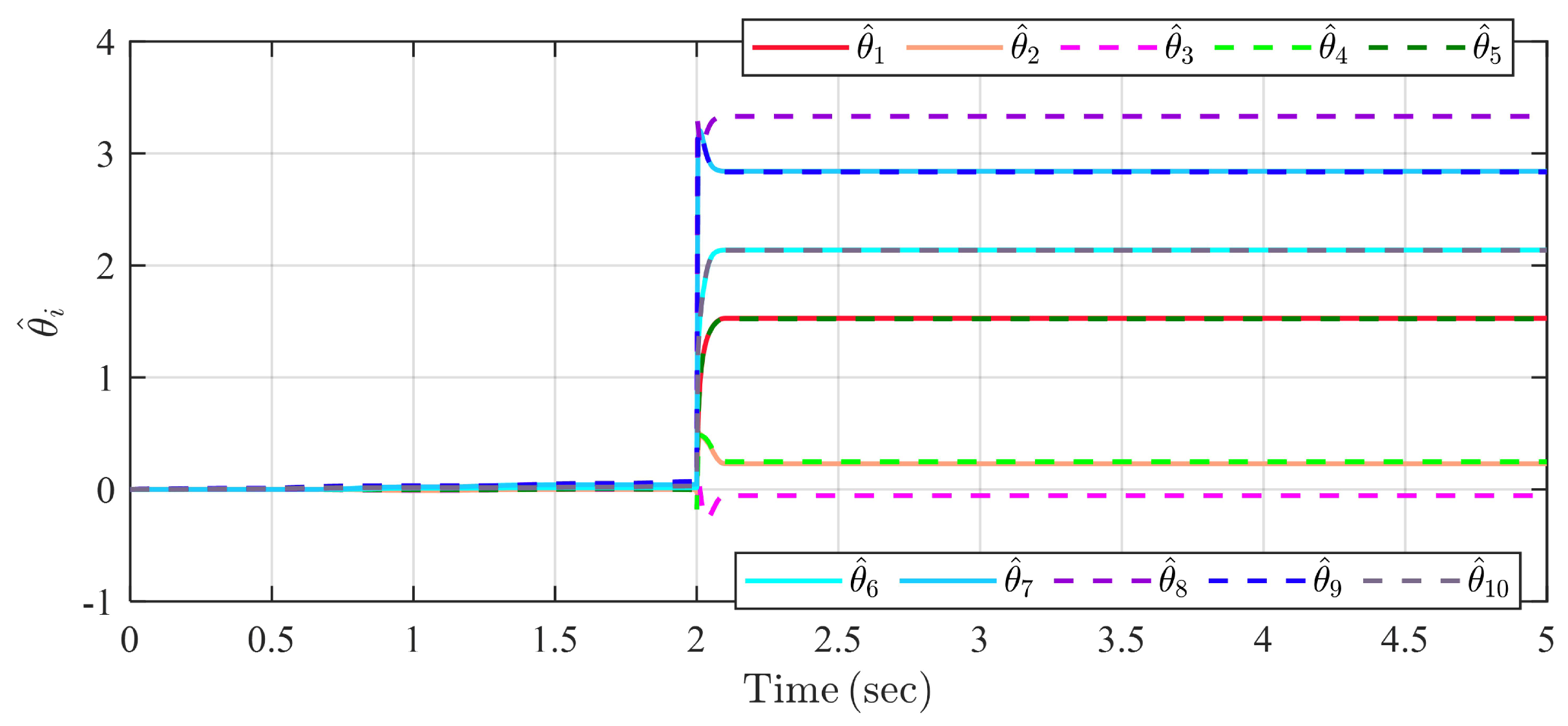
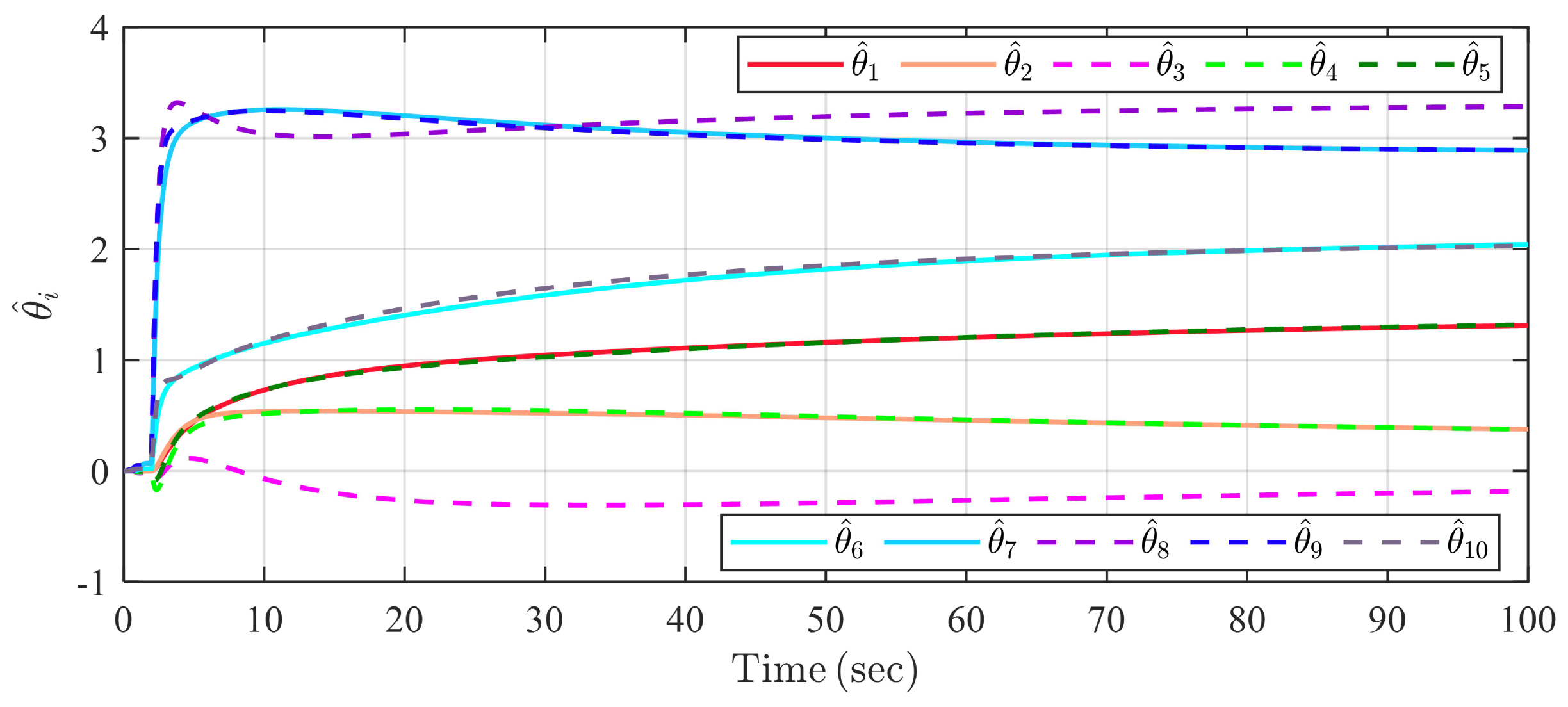
4.2. Simulation of Identification Algorithm with NNAE
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, J.; Efimov, D.; Bobtsov, A.A. On robust parameter estimation in finite-time without persistence of excitation. IEEE Trans. Autom. Control 2020, 65, 1731–1738. [Google Scholar] [CrossRef]
- Krstic, M.; Kokotovic, P.V.; Kanellakopoulos, I. Nonlinear and Adaptive Control Design, 1st ed.; Wiley-Interscience: New York, NY, USA, 1995. [Google Scholar]
- Djaneye-Boundjou, O.; Ordonez, R. Gradient-based discrete-time concurrent learning for standalone function approximation. IEEE Trans. Autom. Control 2020, 65, 749–756. [Google Scholar] [CrossRef]
- Chowdhary, G.V.; Johnson, E.N. Theory and flight-test validation of a concurrent-learning adaptive controller. J. Guid. Control. Dyn. 2011, 34, 592–607. [Google Scholar] [CrossRef]
- Chowdhary, G.; Yucelen, T.; Mühlegg, M.; Johnson, E.N. Concurrent learning adaptive control of linear systems with exponentially convergent bounds. Int. J. Adapt. Control Signal Process. 2013, 27, 280–301. [Google Scholar] [CrossRef]
- Kamalapurkar, R.; Reish, B.; Chowdhary, G.; Dixon, W.E. Concurrent learning for parameter estimation using dynamic state-derivative estimators. IEEE Trans. Autom. Control 2017, 62, 3594–3601. [Google Scholar] [CrossRef]
- Parikh, A.; Kamalapurkar, R.; Dixon, W.E. Integral concurrent learning: Adaptive control with parameter convergence using finite excitation. Int. J. Adapt. Control Signal Process. 2019, 33, 1775–1787. [Google Scholar] [CrossRef]
- Bell, Z.I.; Nezvadovitz, J.; Parikh, A.; Schwartz, E.M.; Dixon, W.E. Global exponential tracking control for an autonomous surface vessel: An integral concurrent learning approach. IEEE J. Ocean. Eng. 2020, 45, 362–370. [Google Scholar] [CrossRef]
- Du, Y.; Liu, F.; Qiu, J.; Buss, M. Online identification of piecewise affine systems using integral concurrent learning. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 4324–4336. [Google Scholar] [CrossRef]
- Zhao, L.; Zhi, J.; Yin, N.; Chen, Y.; Li, J.; Liu, J. Performance improvement of finite time parameter estimation with relaxed persistence of excitation condition. J. Electr. Eng. Technol. 2019, 14, 931–939. [Google Scholar] [CrossRef]
- Na, J.; Mahyuddin, M.N.; Herrmann, G.; Ren, X.; Barber, P. Robust adaptive finite-time parameter estimation and control for robotic systems. Int. J. Robust Nonlinear Control 2015, 25, 3045–3071. [Google Scholar] [CrossRef]
- Wang, S.; Na, J.; Yu, H.; Chen, Q. Finite time parameter estimation-based adaptive predefined performance control for servo mechanisms. ISA Trans. 2019, 87, 174–186. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Jiang, Y.; He, W.; Na, J.; Li, Z.; Xu, B. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence. IEEE Trans. Ind. Electron. 2018, 65, 8112–8123. [Google Scholar] [CrossRef]
- Yang, C.; Jiang, Y.; Na, J.; Li, Z.; Cheng, L.; Su, C.Y. Finite-time convergence adaptive fuzzy control for dual-arm robot with unknown kinematics and dynamics. IEEE Trans. Fuzzy Syst. 2019, 27, 574–588. [Google Scholar] [CrossRef]
- Vahidi-Moghaddam, A.; Mazouchi, M.; Modares, H. Memory-augmented system identification with finite-time convergence. IEEE Control Syst. Lett. 2021, 5, 571–576. [Google Scholar] [CrossRef]
- Tatari, F.; Modares, H.; Panayiotou, C.; Polycarpou, M. Finite-time distributed identification for nonlinear interconnected systems. IEEE/CAA J. Autom. Sin. 2022, 9, 1188–1199. [Google Scholar] [CrossRef]
- Wu, Z.; Guo, J.; Liu, B.; Ni, J.; Bu, X. Composite learning adaptive dynamic surface control for uncertain nonlinear strict-feedback systems with fixed-time parameter estimation under sufficient excitation. Int. J. Robust Nonlinear Control 2021, 31, 5865–5889. [Google Scholar] [CrossRef]
- Tatari, F.; Mazouchi, M.; Modares, H. Fixed-time system identification using concurrent learning. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 4892–4902. [Google Scholar] [CrossRef] [PubMed]
- Bobtsov, A.; Nikolaev, N.; Ortega, R.; Efimov, D. State observation of ltv systems with delayed measurements: A parameter estimation-based approach with fixed convergence time. Automatica 2021, 131, 109674. [Google Scholar] [CrossRef]
- Gallegos, J.A.; Aguila-Camacho, N. Necessary and sufficient conditions for convergence of drem-based estimators with applications in adaptive control. Automatica 2022, 146, 110597. [Google Scholar] [CrossRef]
- Jiménez-Rodríguez, E.; Muñoz-Vázquez, A.J.; Sánchez-Torres, J.D.; Defoort, M.; Loukianov, A.G. A lyapunov-like characterization of predefined-time stability. IEEE Trans. Autom. Control 2020, 65, 4922–4927. [Google Scholar] [CrossRef]
- Ferrara, A.; Incremona, G.P. Predefined-time output stabilization with second order sliding mode generation. IEEE Trans. Autom. Control 2021, 66, 1445–1451. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, D.; Aldana-López, R.; Seeber, R.; Angulo, M.T.; Fridman, L. An arbitrary-order exact differentiator with predefined convergence time bound for signals with exponential growth bound. Automatica 2023, 153, 110995. [Google Scholar] [CrossRef]
- Seeber, R.; Haimovich, H.; Horn, M.; Fridman, L.M.; De Battista, H. Robust exact differentiators with predefined convergence time. Automatica 2021, 134, 109858. [Google Scholar] [CrossRef]
- Yang, X.; Fan, X.; Long, F.; Li, G. Predefined-time robust control with formation constraints and saturated controls. Nonlinear Dyn. 2022, 110, 2535–2554. [Google Scholar] [CrossRef]
- Wang, W.; Hou, M.; Liu, B. Fault-tolerant adaptive asymptotic attitude tracking control for a rigid spacecraft. Iran. J. Sci.-Technol.-Trans. Electr. Eng. 2021, 45, 1383–1394. [Google Scholar] [CrossRef]
- Na, J.; Huang, Y.; Liu, T.; Zhu, Q. Reinforced adaptive parameter estimation with prescribed transient convergence performance. Syst. Control Lett. 2021, 149, 104880. [Google Scholar] [CrossRef]
- Dastres, H.; Ebrahimi, S.M.; Malekzadeh, M.; Gordillo, F. Robust adaptive parameter estimator design for a multi-sinusoidal signal with fixed-time stability and guaranteed prescribed performance boundary of estimation error. J. Frankl. Inst. 2023, 360, 223–250. [Google Scholar] [CrossRef]
- Wu, Z.; Ma, M.; Xu, X.; Liu, B.; Yu, Z. Predefined-time parameter estimation via modified dynamic regressor extension and mixing. J. Frankl. Inst. 2021, 358, 6897–6921. [Google Scholar] [CrossRef]
- Yang, X. Some trace inequalities for operators. J. Aust. Math. Soc. 1995, 58, 281–286. [Google Scholar] [CrossRef]
- Ma, R.; Fu, L.; Fu, J. Prescribed-time tracking control for nonlinear systems with guaranteed performance. Automatica 2022, 146, 110573. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Operation |
|---|---|
| 1 | Parameter Setting: T, c, , , , , , , . |
| 2 | If |
| 3 | Regressor Filtering: (11), (12). |
| 4 | System Normalization: (13). |
| 5 | If |
| 6 | Current State Estimation Error Calculating: (15). |
| 7 | If and |
| 8 | Data Recording: (17). |
| 9 | End |
| 10 | State Estimation Error for ith Recorded Sample Calculating: (18). |
| 11 | Parameter Estimation Updating: (23). |
| 12 | If H is of Full Row Rank for the First Time |
| 13 | Select Parameter |
| 14 | End |
| 15 | Else |
| 16 | State Estimation Error for ith Recorded Sample Calculating: (18). |
| 17 | Parameter Estimation Updating: (23). |
| 18 | End |
| 19 | End |
| Parameters | |||||
|---|---|---|---|---|---|
| 0.8182 | 0.8182 | 0.8182 | 0.8186 | 0.8183 | |
| 0.9357 | 0.9357 | 0.9358 | 0.9366 | 0.9360 | |
| 2.59 | 2.39 | 2.16 | 2.08 | 2.03 |
| Parameters | |||||
|---|---|---|---|---|---|
| 18.9727 | 1.7258 | 0.8182 | 0.7804 | 0.7616 | |
| 5.5829 | 1.2126 | 0.9358 | 0.9314 | 0.9312 | |
| 8.49 | 2.19 | 2.25 | 2.43 | 2.47 |
| Parameters | |||||
|---|---|---|---|---|---|
| 0.8157 | 0.8157 | 0.8157 | 0.8157 | 0.8157 | |
| 0.9304 | 0.9302 | 0.9302 | 0.9302 | 0.9302 | |
| 9.03 | 8.06 | 6.12 | 4.17 | 2.22 |
| Parameters | |||||
|---|---|---|---|---|---|
| 0.8233 | 0.8233 | 0.8226 | 0.8233 | 0.8233 | |
| 0.9550 | 0.9550 | 0.9538 | 0.9550 | 0.9550 | |
| 5.10 | 5.10 | 5.10 | 5.10 | 5.10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Zhang, Z.; Yi, Y. Concurrent Learning-Based Two-Stage Predefined-Time System Identification. Electronics 2024, 13, 1460. https://doi.org/10.3390/electronics13081460
Liu B, Zhang Z, Yi Y. Concurrent Learning-Based Two-Stage Predefined-Time System Identification. Electronics. 2024; 13(8):1460. https://doi.org/10.3390/electronics13081460
Chicago/Turabian StyleLiu, Bojun, Zhanpeng Zhang, and Yingmin Yi. 2024. "Concurrent Learning-Based Two-Stage Predefined-Time System Identification" Electronics 13, no. 8: 1460. https://doi.org/10.3390/electronics13081460
APA StyleLiu, B., Zhang, Z., & Yi, Y. (2024). Concurrent Learning-Based Two-Stage Predefined-Time System Identification. Electronics, 13(8), 1460. https://doi.org/10.3390/electronics13081460