

A Novel Active Anti-Disturbance Control Strategy for Unmanned Aerial Manipulator Based on Variable Coupling Disturbance Compensation


Abstract
:1. Introduction
- The active advantage of using the UAM’s own manipulator can reduce energy consumption, increase UAM endurance time, and further improve the capability and limit of resisting external lumped disturbances torque. The variable load on the end-effector also contributes to this improvement.
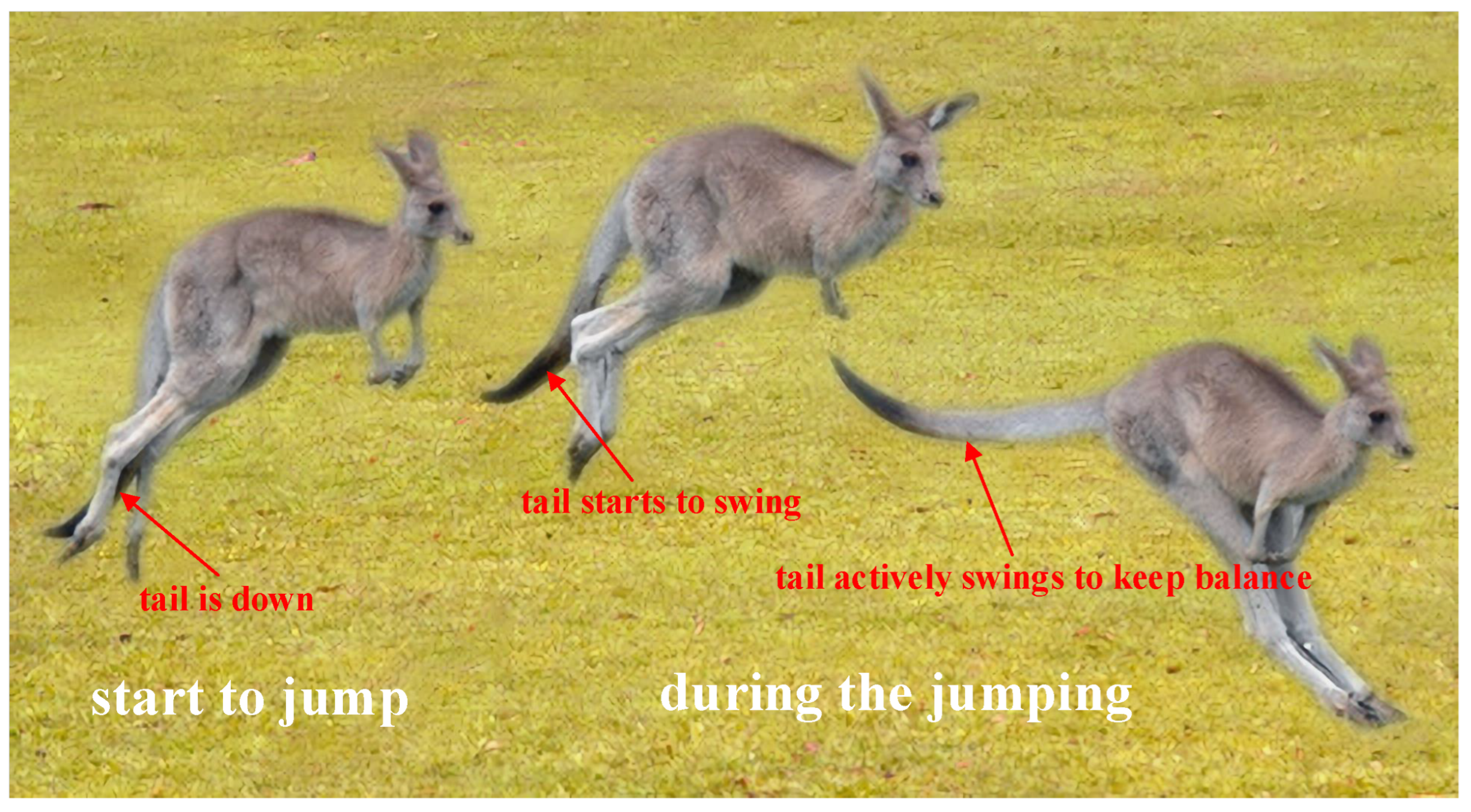
- The coupling disturbance torque generated by the active swing of the manipulator can be faster and more direct than the aerodynamic torque generated by the propellers, because the latter can be affected by a slow aerodynamic response and slow motor response.
- The proposed can also be used to achieve posture balance in highly dynamic scenarios and provide the required tilting torque for UAMs and UAVs to perform quick attitude maneuvers, such as maintaining stability at the moment when a heavy object falls in an UAM pick and place scenario.
2. Dynamics Modeling and Problem Statement
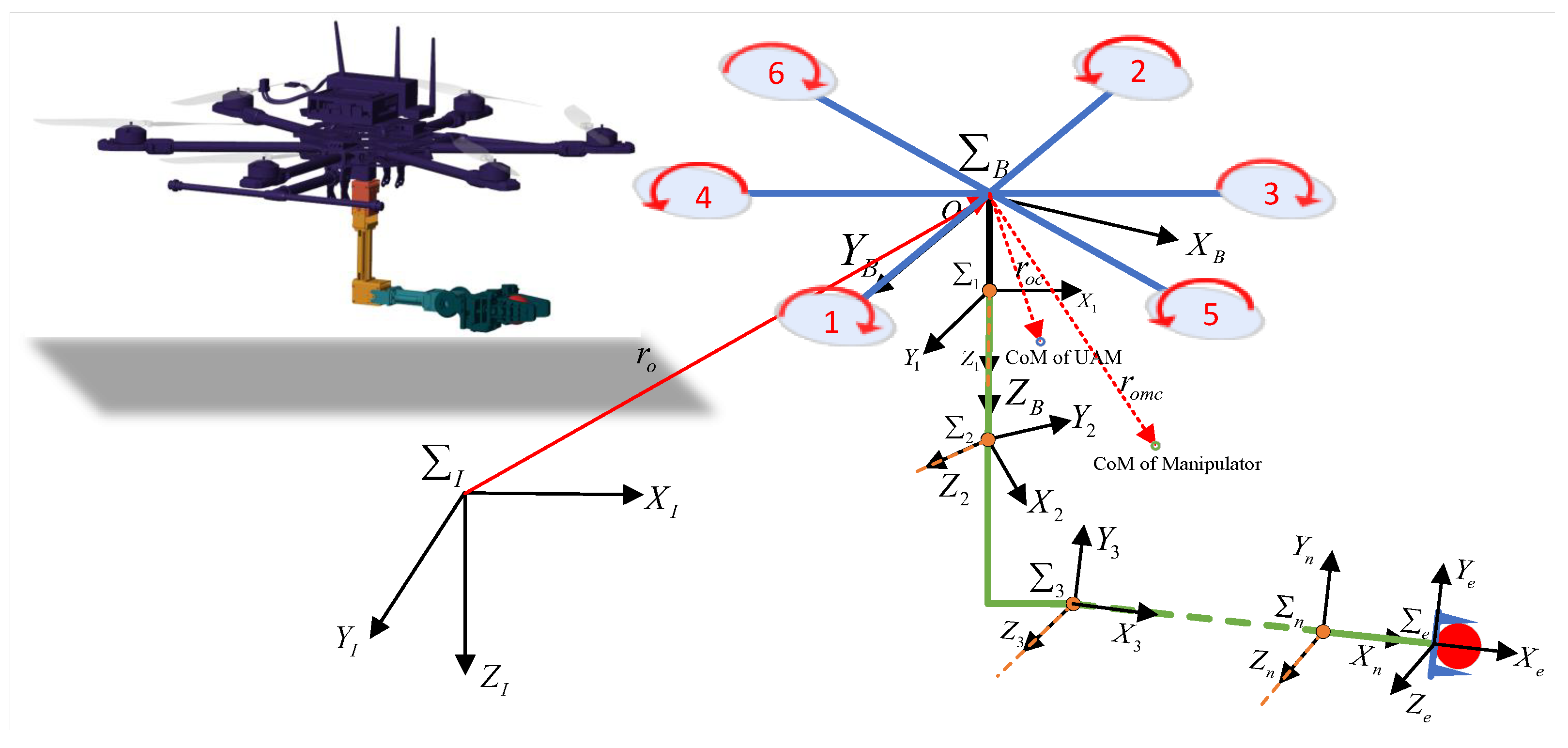
2.1. UAM Dynamics Modeling
2.2. Problem Statement
- How to formulate the above problem into a nonlinear programming problem under specific physical constraints and solve it, which is the focus of this paper.
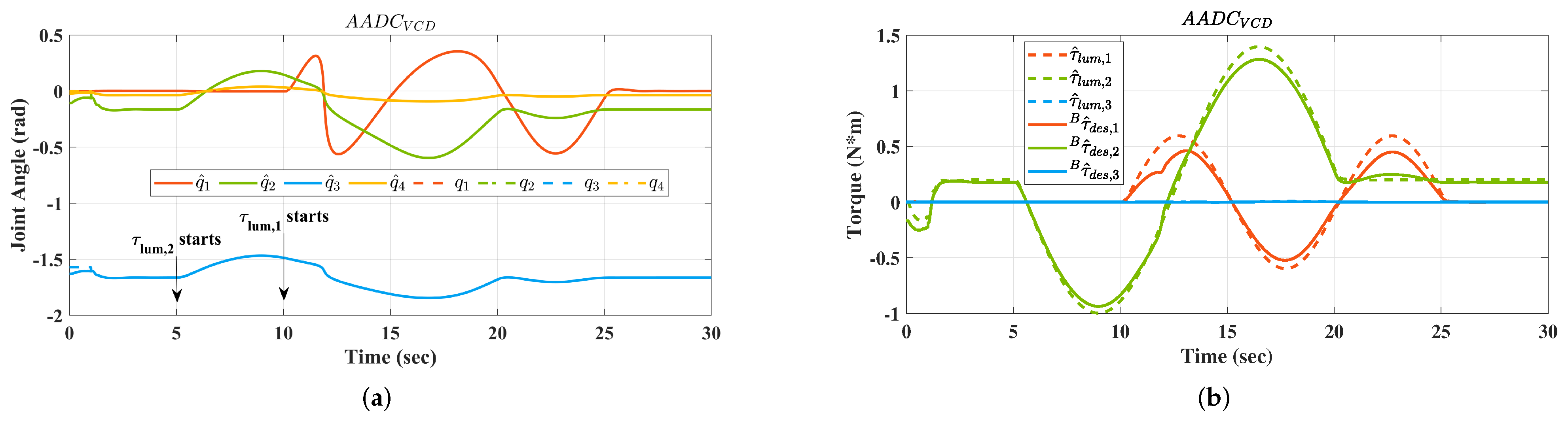
- How to obtain the desired coupling disturbance torque (i.e., the estimation of the lumped disturbances torque).
3. Method
3.1. NLP Formulation
3.2. Disturbance Observer Design
3.3. Nominal Controller Design
4. Simulation Results
4.1. Simulation Setups
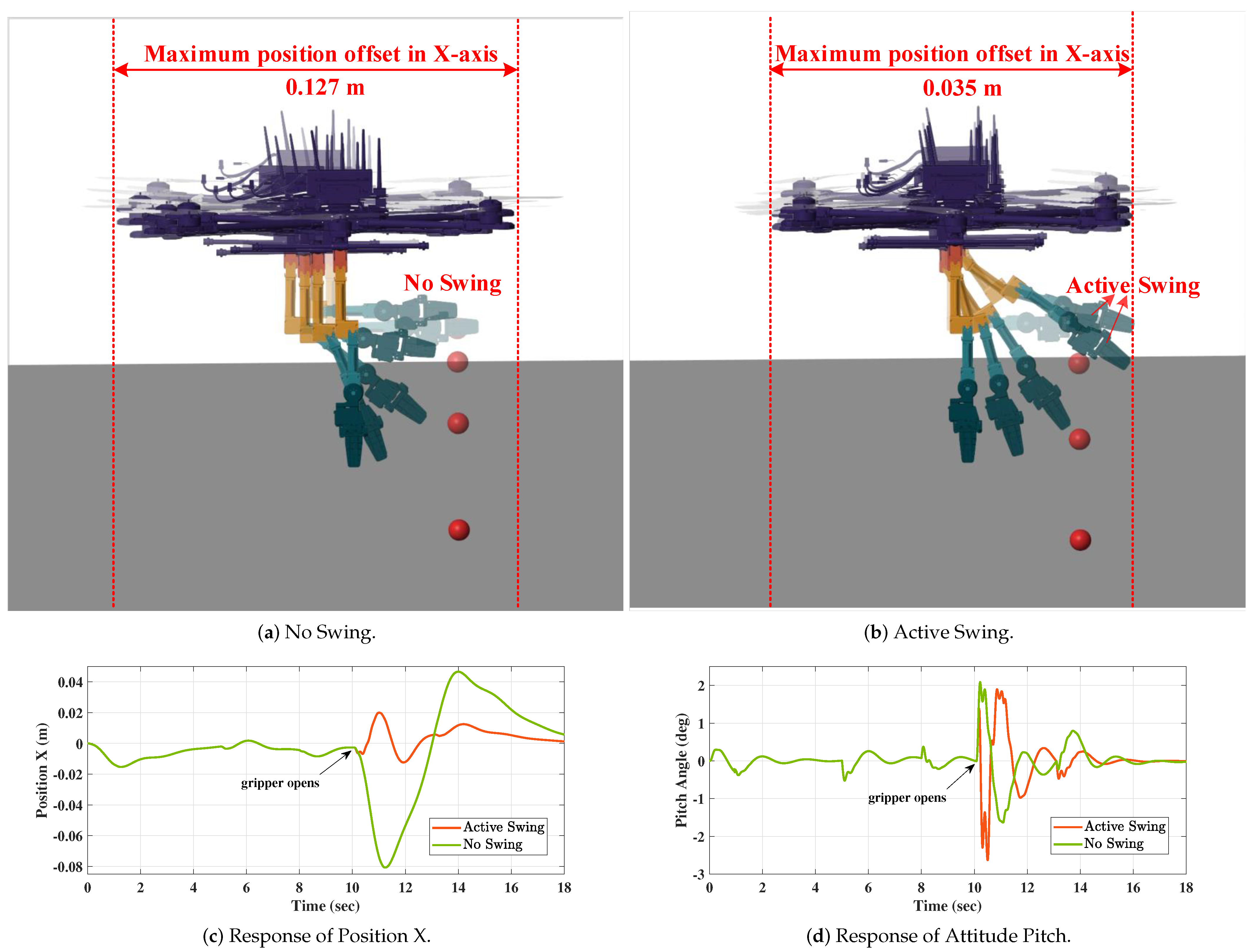
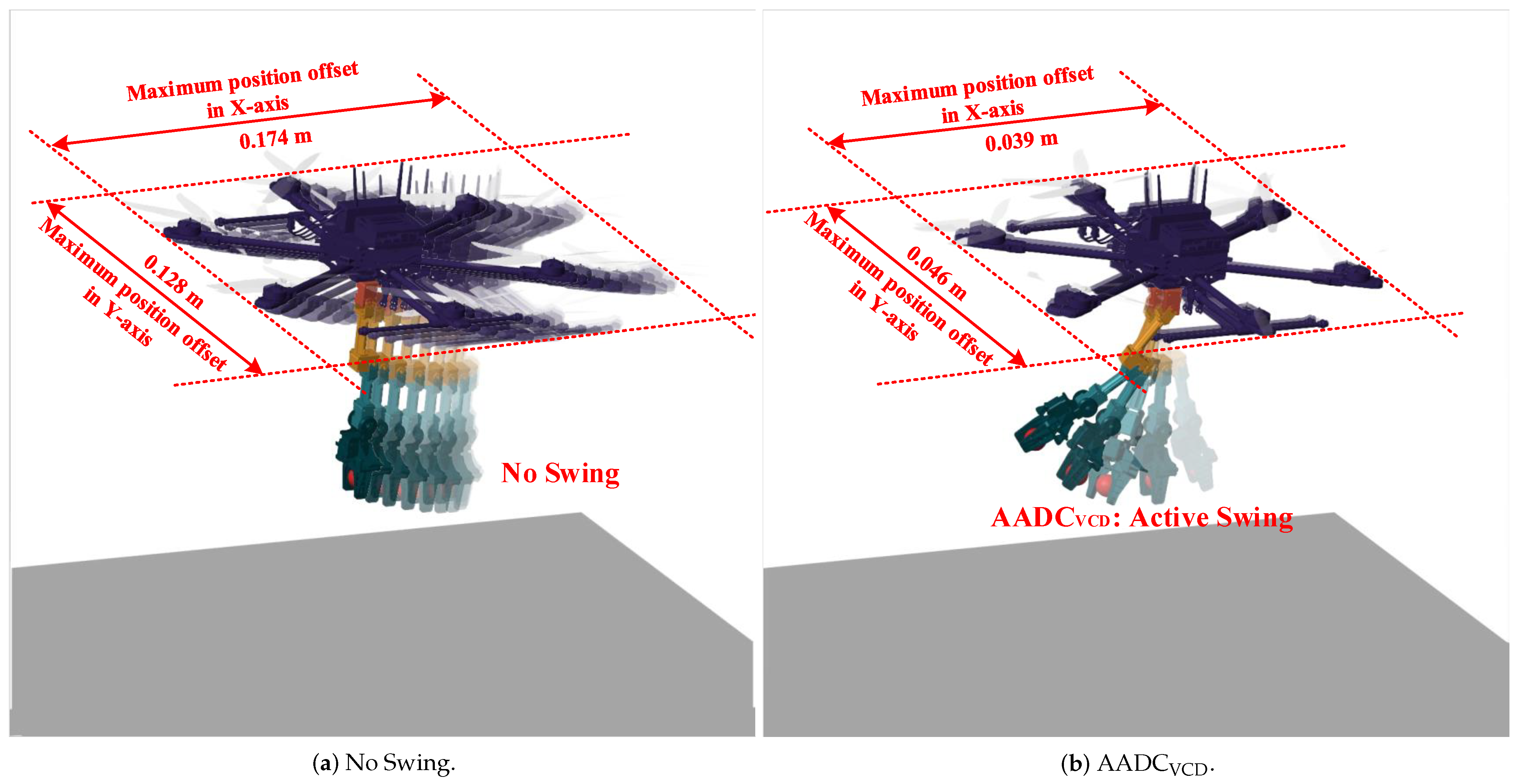
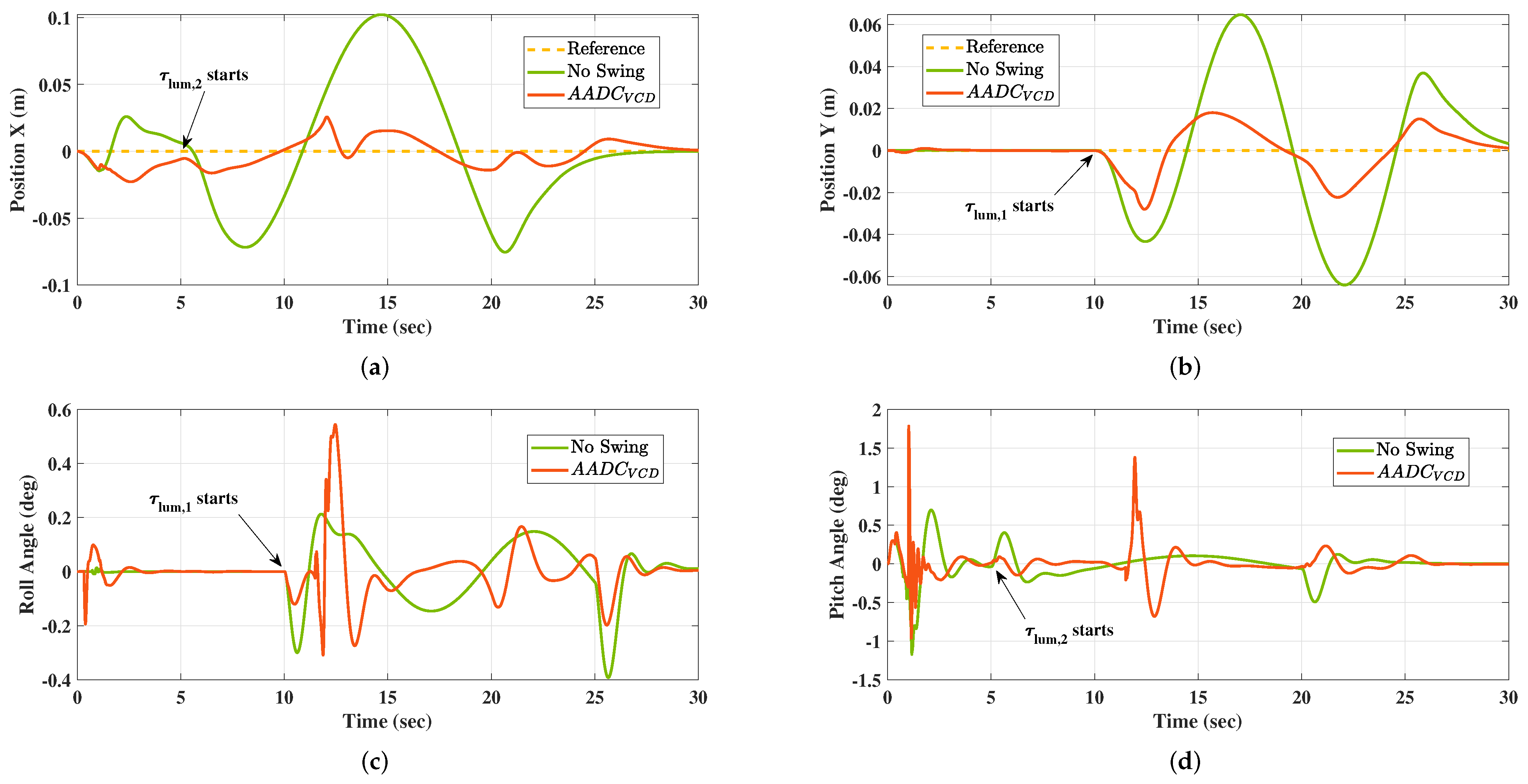
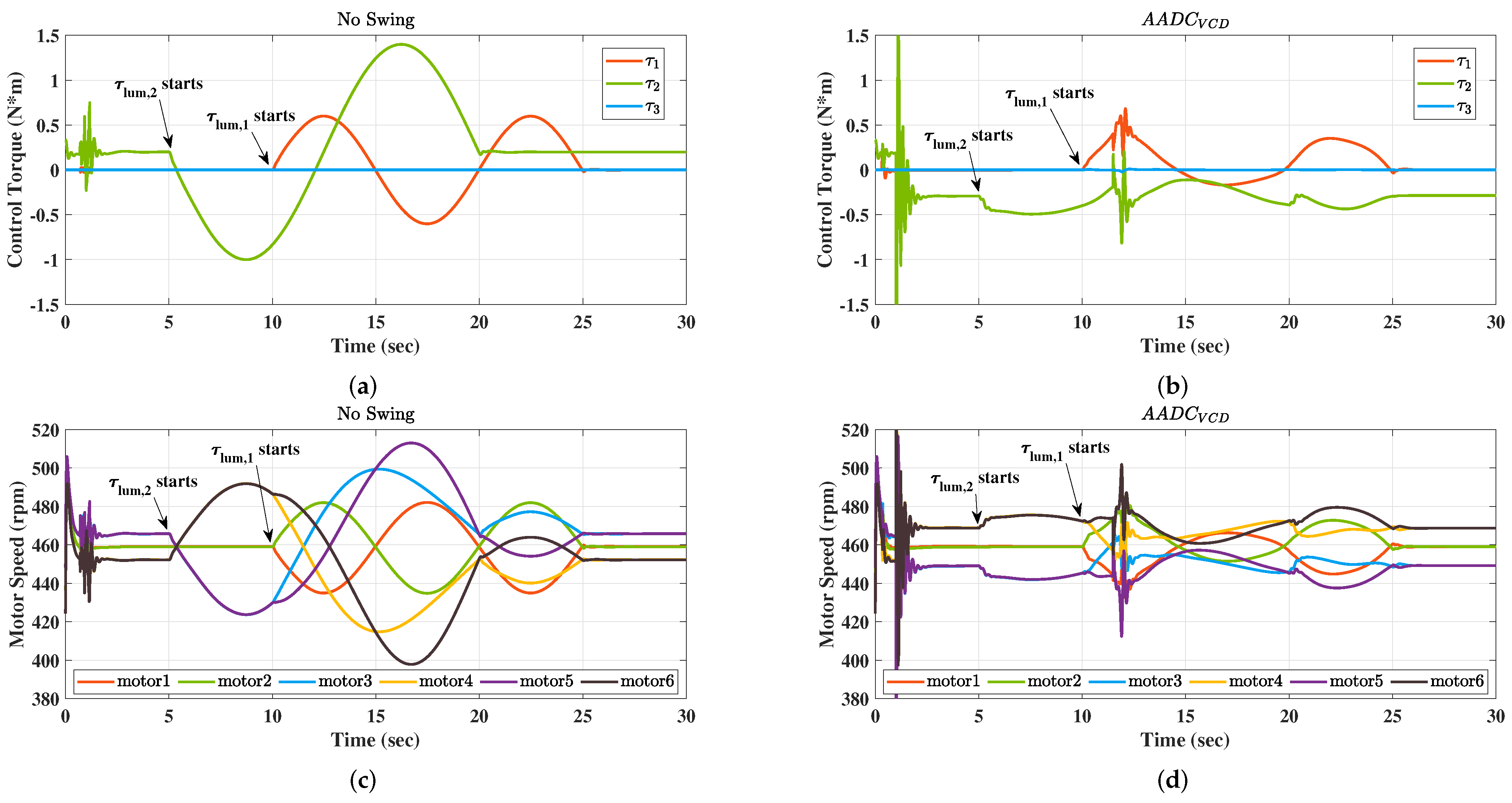
4.2. Simulation I: Keeping Stable in Pick and Place Scenario
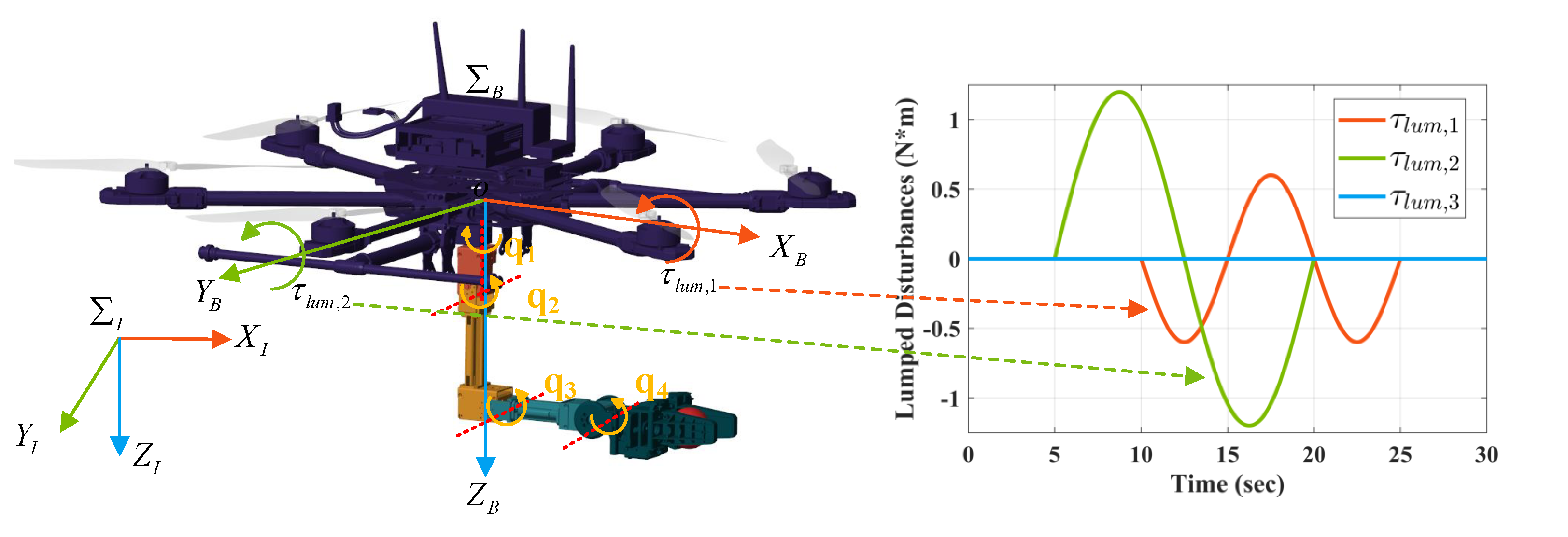
4.3. Simulation II: Suppressing Lumped Disturbances Using
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ollero, A.; Tognon, M.; Suarez, A.; Lee, D.; Franchi, A. Past, Present, and Future of Aerial Robotic Manipulators. IEEE Trans. Robot. 2022, 38, 626–645. [Google Scholar] [CrossRef]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial Manipulation: A Literature Review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef]
- Wang, M.; Chen, Z.; Guo, K.; Yu, X.; Zhang, Y.; Guo, L.; Wang, W. Millimeter-Level Pick and Peg-in-Hole Task Achieved by Aerial Manipulator. IEEE Trans. Robot. 2024, 40, 1242–1260. [Google Scholar] [CrossRef]
- Miyazaki, R.; Paul, H.; Kominami, T.; Martinez, R.R.; Shimonomura, K. Flying washer: Development of high-pressure washing aerial robot employing multirotor platform with add-on thrusters. Drones 2022, 6, 286. [Google Scholar] [CrossRef]
- Kutia, J.R.; Stol, K.A.; Xu, W. Aerial manipulator interactions with trees for canopy sampling. IEEE/ASME Trans. Mechatron. 2018, 23, 1740–1749. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, J.; Wu, Y.; Miao, Z.; Zhang, H.; Wang, Y. Adaptive sliding-mode disturbance observer-based finite-time control for unmanned aerial manipulator with prescribed performance. IEEE Trans. Cybern. 2022, 53, 3263–3276. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; He, Y.; Dai, B.; Gu, F.; Han, J.; Liu, G. Robust control of an aerial manipulator based on a variable inertia parameters model. IEEE Trans. Ind. Electron. 2019, 67, 9515–9525. [Google Scholar] [CrossRef]
- Shi, P.; Yu, X.; Yang, X.; Rodríguez-Andina, J.J.; Sun, W.; Gao, H. Composite Adaptive Synchronous Control of Dual-Drive Gantry Stage With Load Movement. IEEE Open J. Ind. Electron. Soc. 2023, 4, 63–74. [Google Scholar] [CrossRef]
- Li, H.; Li, Z.; Liu, J.; Zheng, X.; Yu, X.; Kaynak, O. Adaptive neural network backstepping control method for aerial manipulator based on coupling disturbance compensation. J. Frankl. Inst. 2024, 361, 106733. [Google Scholar] [CrossRef]
- Liu, Z.; Gao, H.; Yu, X.; Lin, W.; Qiu, J.; Rodríguez-Andina, J.J.; Qu, D. B-Spline Wavelet Neural-Network-Based Adaptive Control for Linear-Motor-Driven Systems via a Novel Gradient Descent Algorithm. IEEE Trans. Ind. Electron. 2024, 71, 1896–1905. [Google Scholar] [CrossRef]
- Buzzato, J.; Hernandes, A.; Becker, M.; Caurin, G.d.P. Aerial manipulation with six-axis force and torque sensor feedback compensation. In Proceedings of the 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), Joao Pessoa, Brazil, 6–10 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 158–163. [Google Scholar]
- Zhong, H.; Miao, Z.; Wang, Y.; Mao, J.; Li, L.; Zhang, H.; Chen, Y.; Fierro, R. A practical visual servo control for aerial manipulation using a spherical projection model. IEEE Trans. Ind. Electron. 2019, 67, 10564–10574. [Google Scholar] [CrossRef]
- Shi, P.; Sun, W.; Yang, X.; Rudas, I.J.; Gao, H. Master-Slave Synchronous Control of Dual-Drive Gantry Stage with Cogging Force Compensation. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 216–225. [Google Scholar] [CrossRef]
- Cao, H.; Li, Y.; Liu, C.; Zhao, S. ESO-Based Robust and High-Precision Tracking Control for Aerial Manipulation. IEEE Trans. Autom. Sci. Eng. 2023, 21, 2139–2155. [Google Scholar] [CrossRef]
- Cao, H.; Wu, Y.; Wang, L. Adaptive NN motion control and predictive coordinate planning for aerial manipulators. Aerosp. Sci. Technol. 2022, 126, 107607. [Google Scholar] [CrossRef]
- Yu, Z.; Huang, Z.; Fu, J.; Jiang, X.; Xin, Y. Controller Design of Quadrotor UAVs with Suspended Payload Based on the Nested Saturation. Flight Control Detect. 2023, 6, 37–43. [Google Scholar]
- Pose, C.; Giribet, J.; Mas, I. Adaptive center-of-mass relocation for aerial manipulator fault tolerance. IEEE Robot. Autom. Lett. 2022, 7, 5583–5590. [Google Scholar] [CrossRef]
- Pose, C.; Giribet, J. Multirotor fault tolerance based on center-of-mass shifting in case of rotor failure. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 38–46. [Google Scholar]
- Lee, S.J.; Jang, I.; Kim, H.J. Fail-safe flight of a fully-actuated quadrotor in a single motor failure. IEEE Robot. Autom. Lett. 2020, 5, 6403–6410. [Google Scholar] [CrossRef]
- Khamseh, H.B.; Janabi-Sharifi, F.; Abdessameud, A. Aerial manipulation—A literature survey. Robot. Auton. Syst. 2018, 107, 221–235. [Google Scholar] [CrossRef]
- Dong, W.; Ma, Z.; Sheng, X.; Zhu, X. Centimeter-level aerial assembly achieved with manipulating condition inference and compliance. IEEE/ASME Trans. Mechatron. 2021, 27, 1660–1671. [Google Scholar] [CrossRef]
- Eneh, J.N.; Nwafor, S.C.; Nnadozie, E.C.; Ani, O.A. Adaptive Fuzzy Sliding Mode Control for an Aerial Manipulator as a Payload on a Quadcopter. In Proceedings of the 2022 5th Information Technology for Education and Development (ITED), Abuja, Nigeria, 1–3 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Lee, D.; Seo, H.; Jang, I.; Lee, S.J.; Kim, H.J. Aerial manipulator pushing a movable structure using a DOB-based robust controller. IEEE Robot. Autom. Lett. 2020, 6, 723–730. [Google Scholar] [CrossRef]
- Li, T.; Li, S.; Sun, H.; Lv, D. The fixed-time observer-based adaptive tracking control for aerial flexible-joint robot with input saturation and output constraint. Drones 2023, 7, 348. [Google Scholar] [CrossRef]
- Zhuang, S.; Lei, D.; Yu, X.; Tong, M.; Lin, W.; Rodriguez-Andina, J.J.; Shi, Y.; Gao, H. Microinjection in Biomedical Applications: An Effortless Autonomous Omnidirectional Microinjection System. IEEE Ind. Electron. Mag. 2023, 2–15. [Google Scholar] [CrossRef]
- Wang, S.; Ma, Z.; Quan, F.; Chen, H. Impact Absorbing and Compensation for Heavy Object Catching with an Unmanned Aerial Manipulator. IEEE Robot. Autom. Lett. 2024, 9, 3656–3663. [Google Scholar] [CrossRef]
- Kangaroos Hopping Sequence. Available online: https://stock.adobe.com/images/kangaroos-hopping-sequence/265721560 (accessed on 22 March 2024).
- Gao, H.; Li, Z.; Yu, X.; Qiu, J. Hierarchical Multiobjective Heuristic for PCB Assembly Optimization in a Beam-Head Surface Mounter. IEEE Trans. Cybern. 2022, 52, 6911–6924. [Google Scholar] [CrossRef]
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Pearson Educacion: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Zheng, Q.; Gaol, L.Q.; Gao, Z. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3501–3506. [Google Scholar]
- Lee, T. Robust Adaptive Attitude Tracking on SO(3) With an Application to a Quadrotor UAV. IEEE Trans. Control Syst. Technol. 2013, 21, 1924–1930. [Google Scholar]
- Miller, S.; Wendlandt, J. Real-time simulation of physical systems using simscape. MATLAB News and Notes, 9 August 2012; 1–13. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| (kg) | 0.702 |
| (kg) | 0.238, 0.123, 0.118, 0.224 |
| (m) | (−0.006794, 0.000253, −0.048813) |
| (m) | (0.107084, −0.010616, 0.000467) |
| (m) | (0.094329, 0.0000, 0.000489) |
| (m) | (0.060527, −0.006058, −0.000021) |
| (kg·m2) | |
| (kg·m2) | |
| (kg·m2) | |
| (kg·m2) |
| i | ||||
|---|---|---|---|---|
| 1 | 0 | 0.012 | 0.0935 | |
| 2 | 0 | 0 | ||
| 3 | 0 | 0.13023 | 0 | |
| 4 | 0 | 0.124 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Li, Z.; Wu, T.; Dong, C.; Xu, Q.; Yang, Y.; Yu, X. A Novel Active Anti-Disturbance Control Strategy for Unmanned Aerial Manipulator Based on Variable Coupling Disturbance Compensation. Electronics 2024, 13, 1477. https://doi.org/10.3390/electronics13081477
Li H, Li Z, Wu T, Dong C, Xu Q, Yang Y, Yu X. A Novel Active Anti-Disturbance Control Strategy for Unmanned Aerial Manipulator Based on Variable Coupling Disturbance Compensation. Electronics. 2024; 13(8):1477. https://doi.org/10.3390/electronics13081477
Chicago/Turabian StyleLi, Hai, Zhan Li, Tong Wu, Chen Dong, Quman Xu, Yipeng Yang, and Xinghu Yu. 2024. "A Novel Active Anti-Disturbance Control Strategy for Unmanned Aerial Manipulator Based on Variable Coupling Disturbance Compensation" Electronics 13, no. 8: 1477. https://doi.org/10.3390/electronics13081477