
Predefined-Time Tracking Control of Unmanned Surface Vehicle under Complex Time-Varying Disturbances

Abstract
:1. Introduction
2. Theoretical Basis and System Model
2.1. Basic Theories of Predefined-Time Convergence
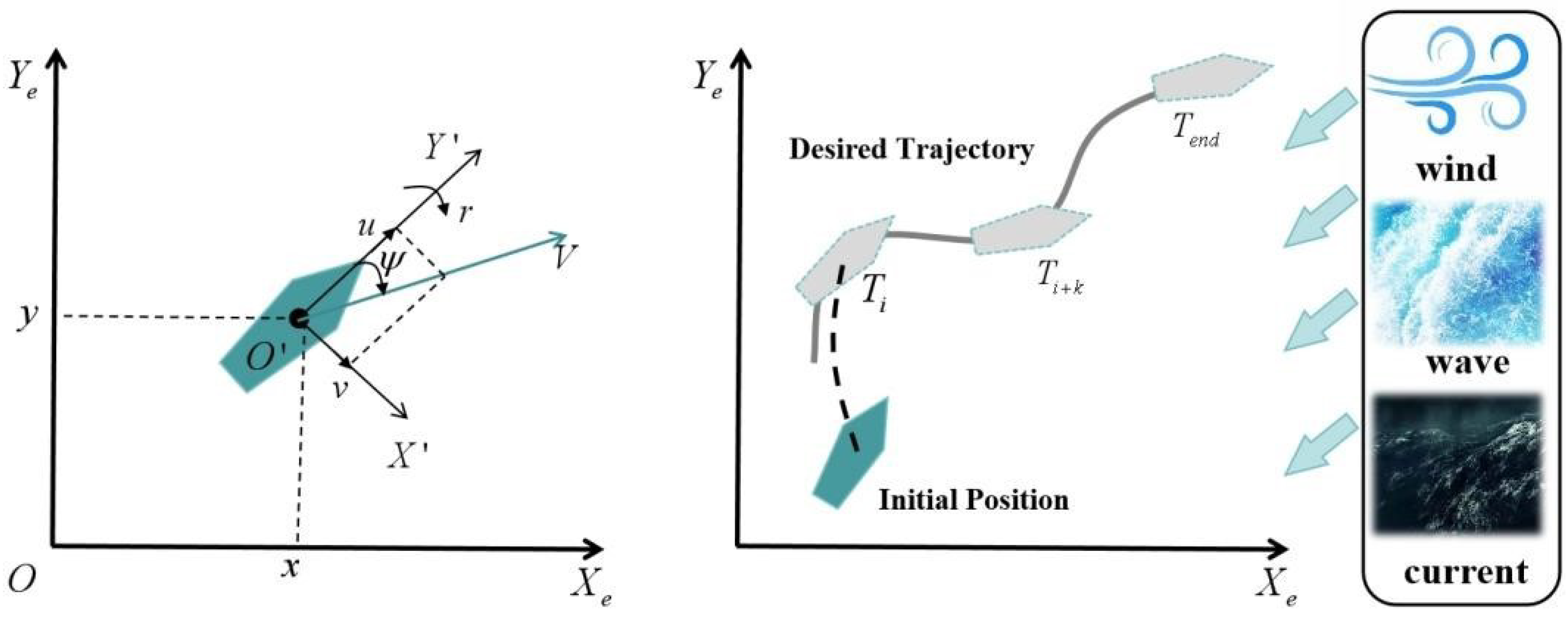
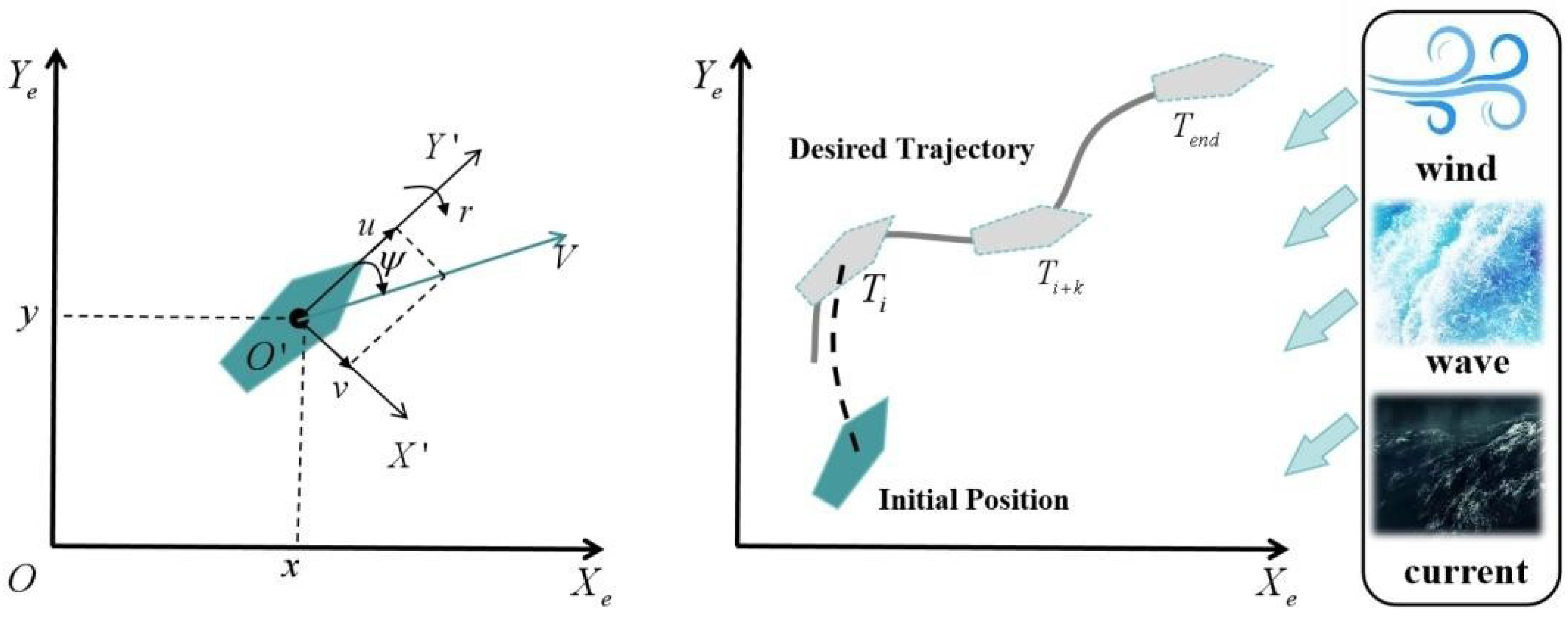
2.2. USV Mathematical Model
2.3. Design of USV Tracking Controller under Ideal Conditions
3. Design of Tracking Controller for USV under Complex Disturbances
3.1. Predefined Time Disturbance Observer
3.2. Predefined Time Sliding Mode Tracking Controller
4. Numerical Simulation and Discussion Analysis
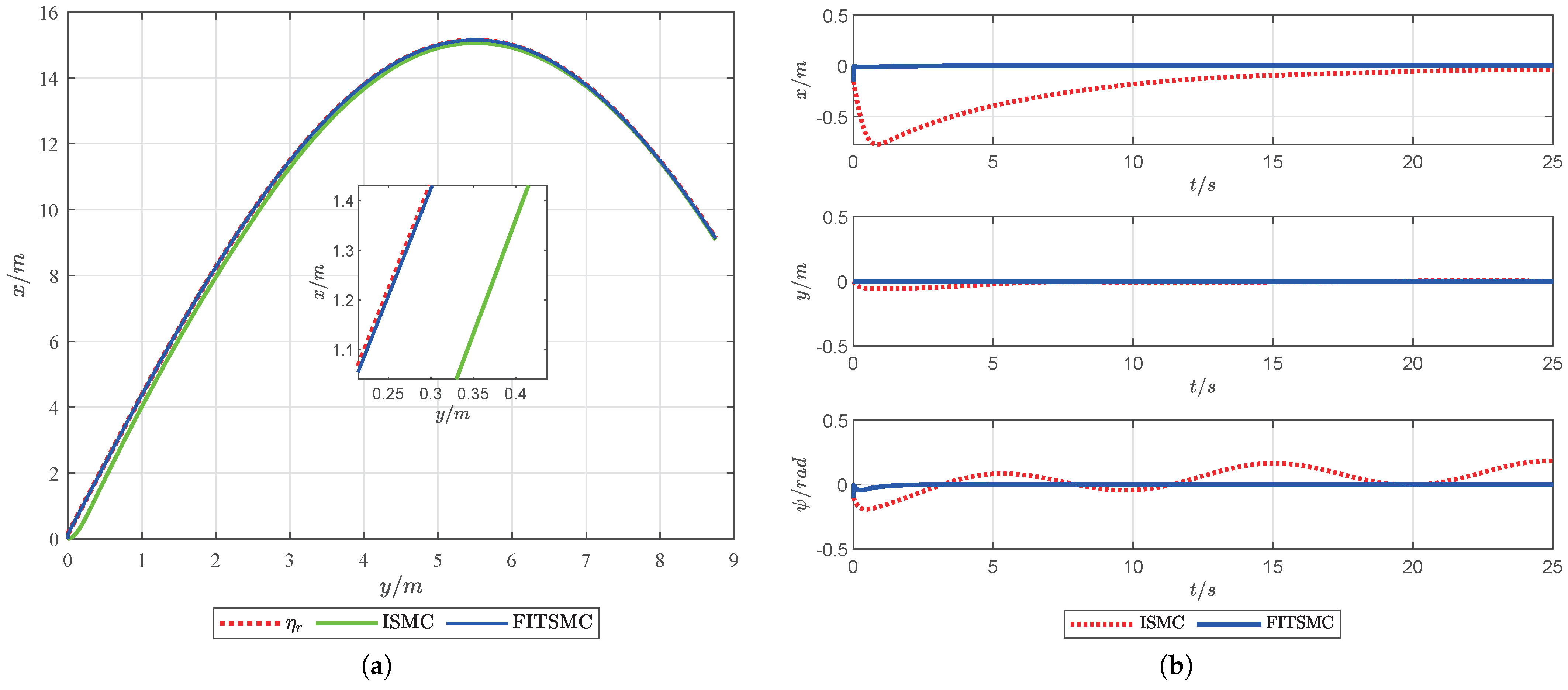
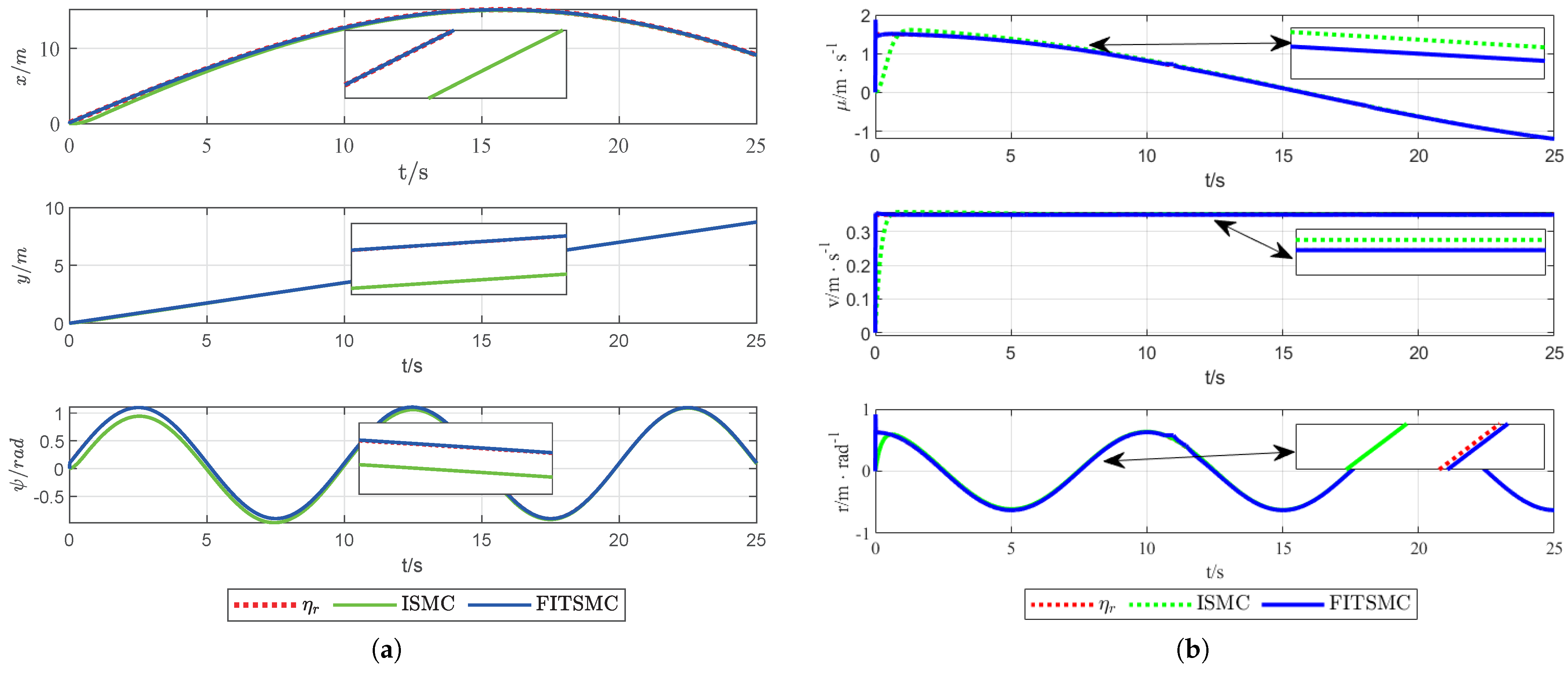
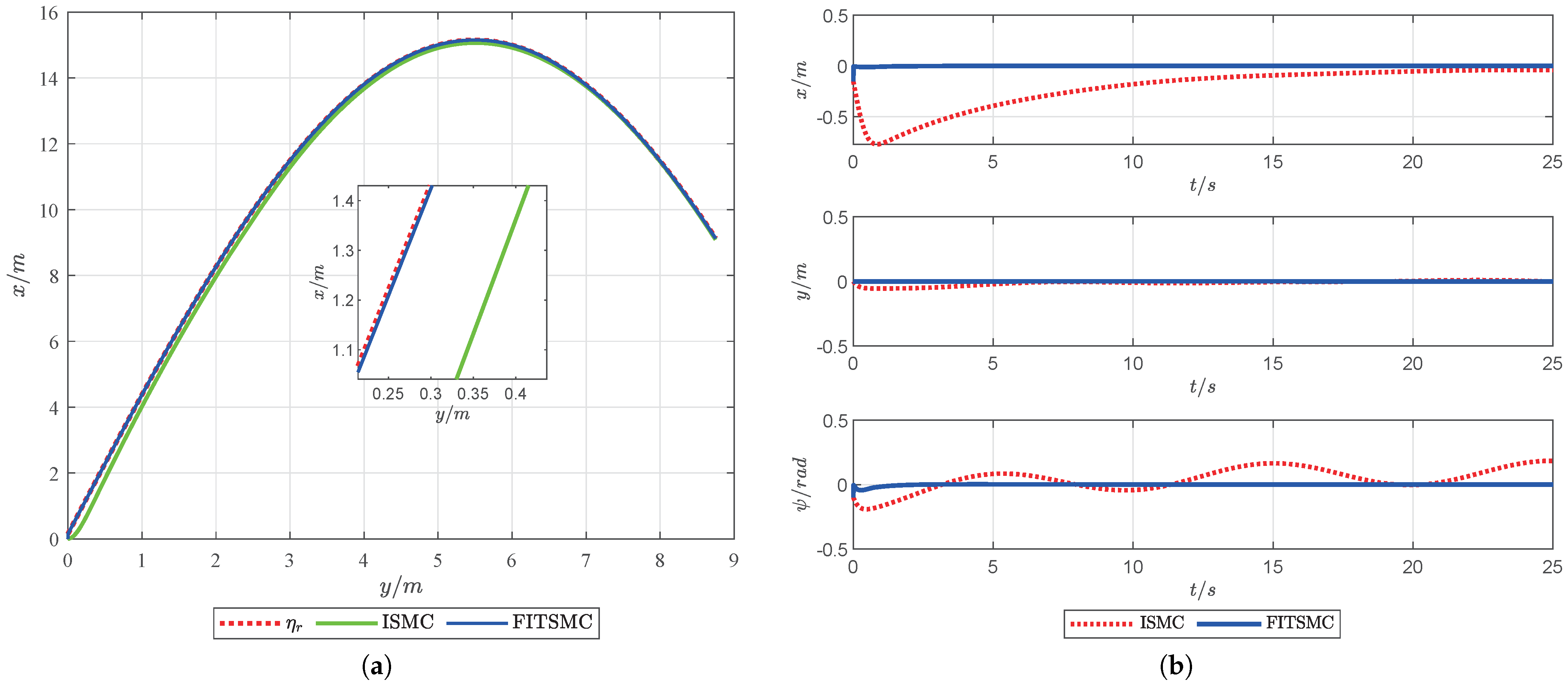
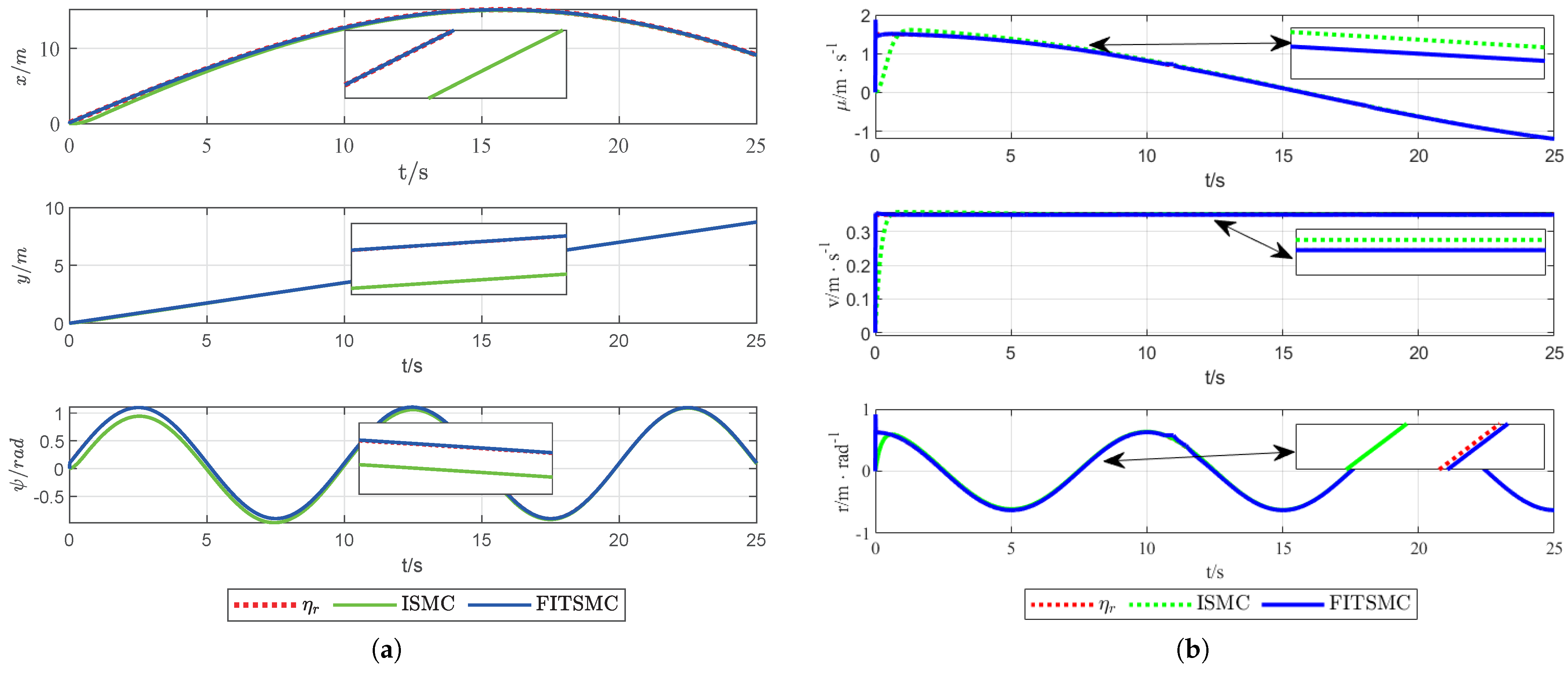
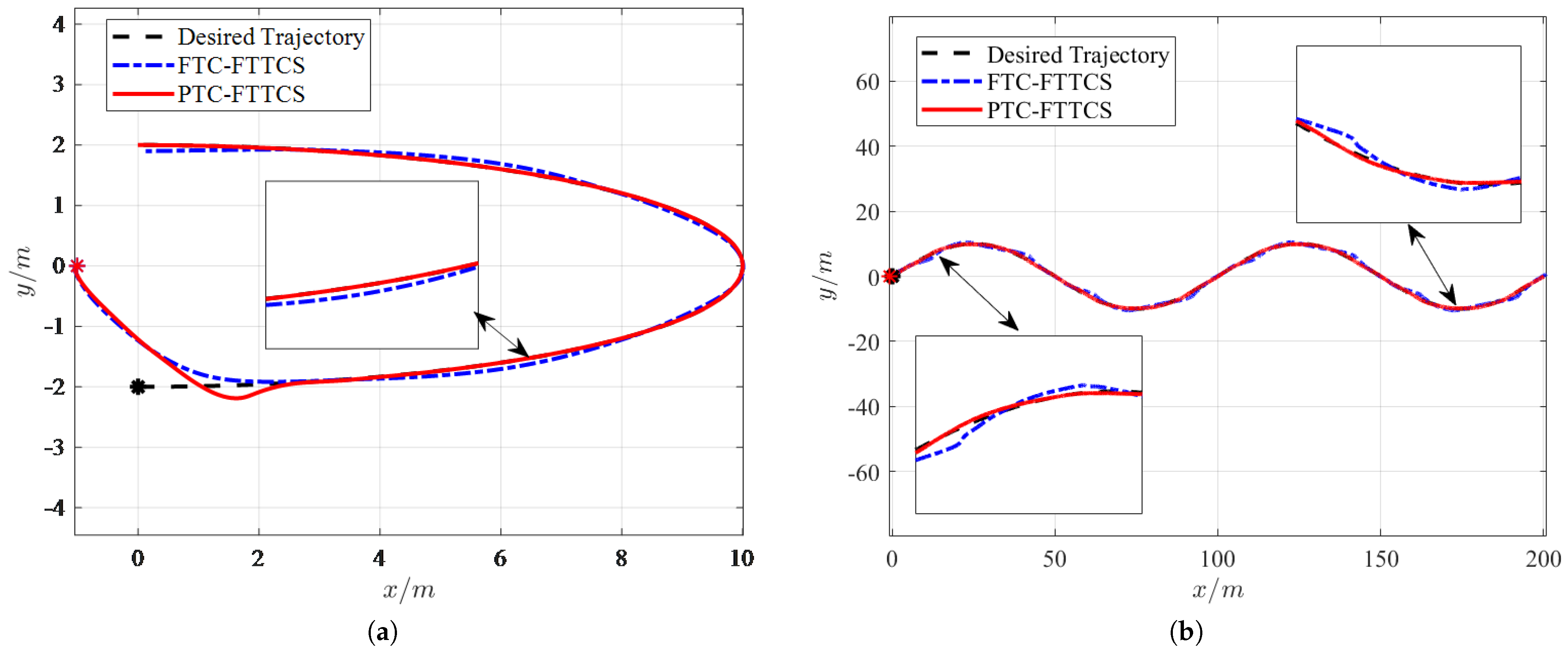
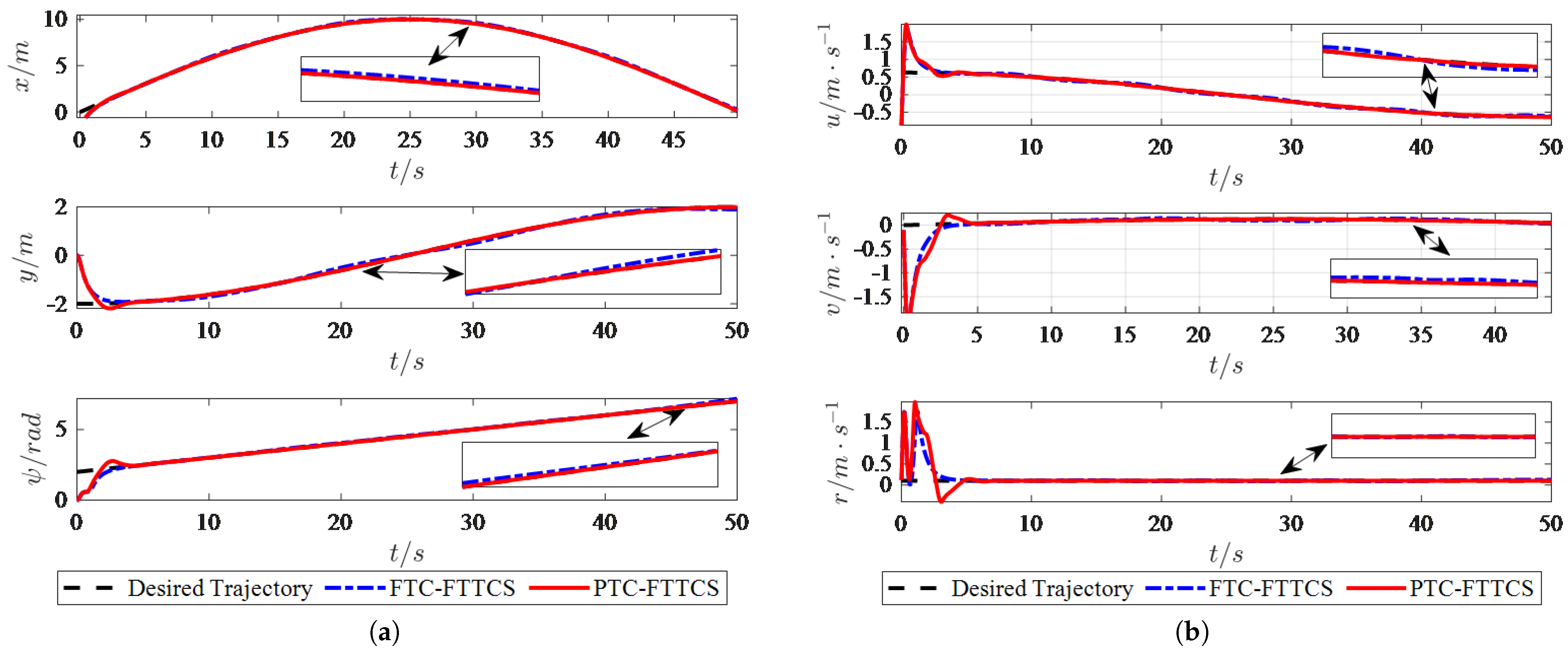
4.1. FITSMC-TTCS under Ideal Navigation State
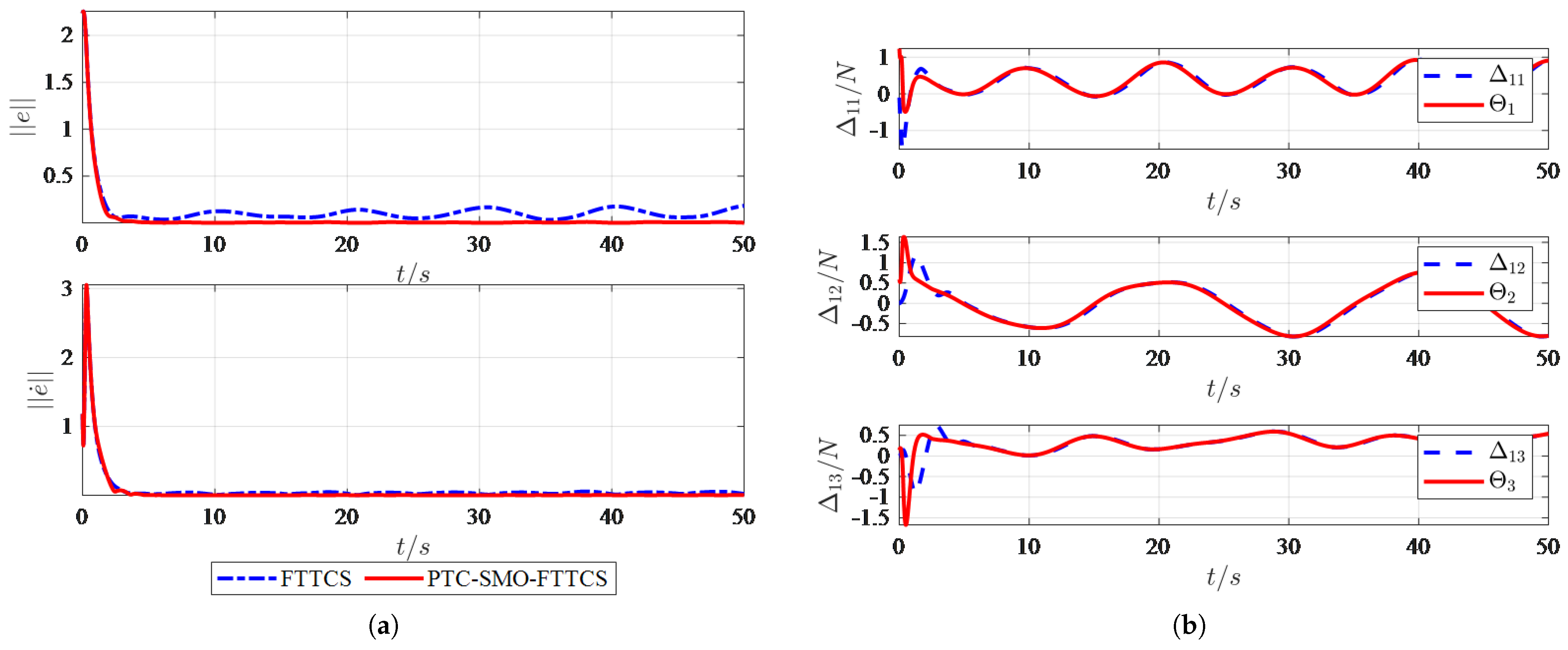
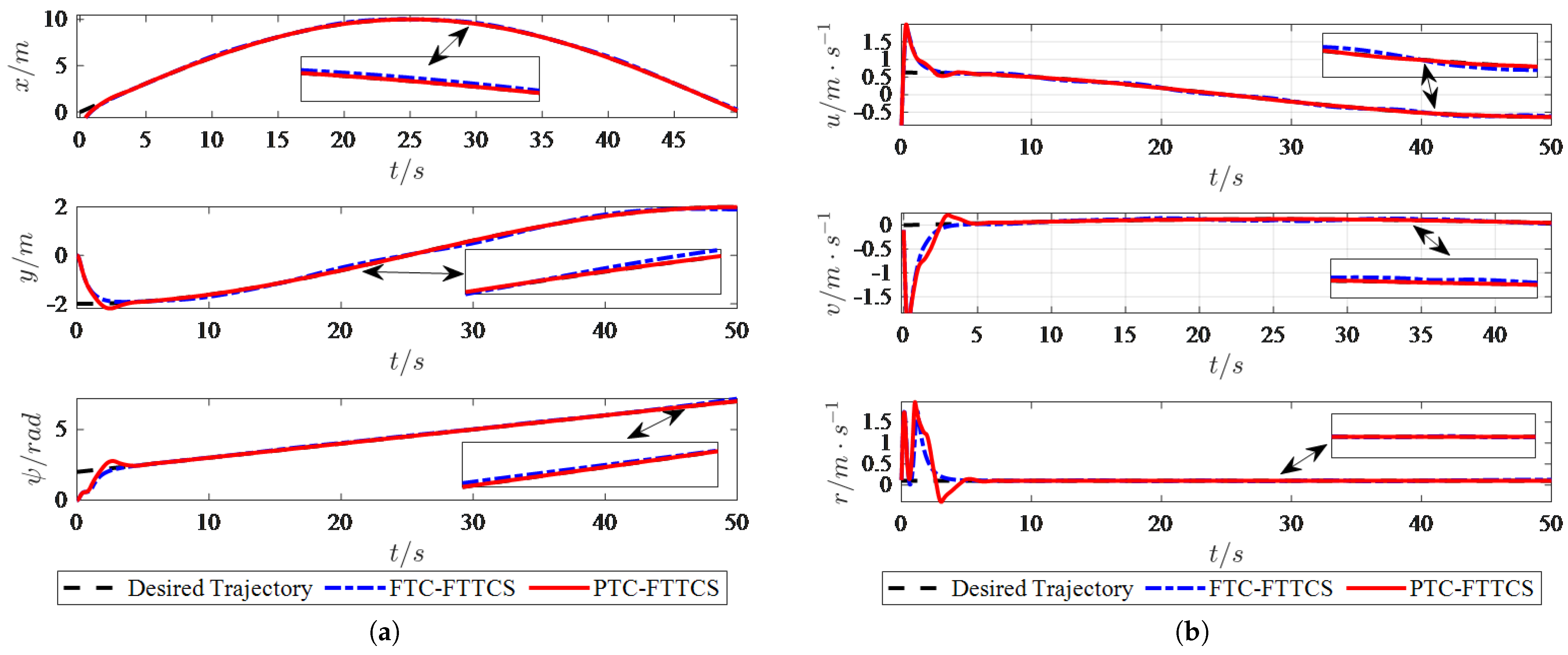
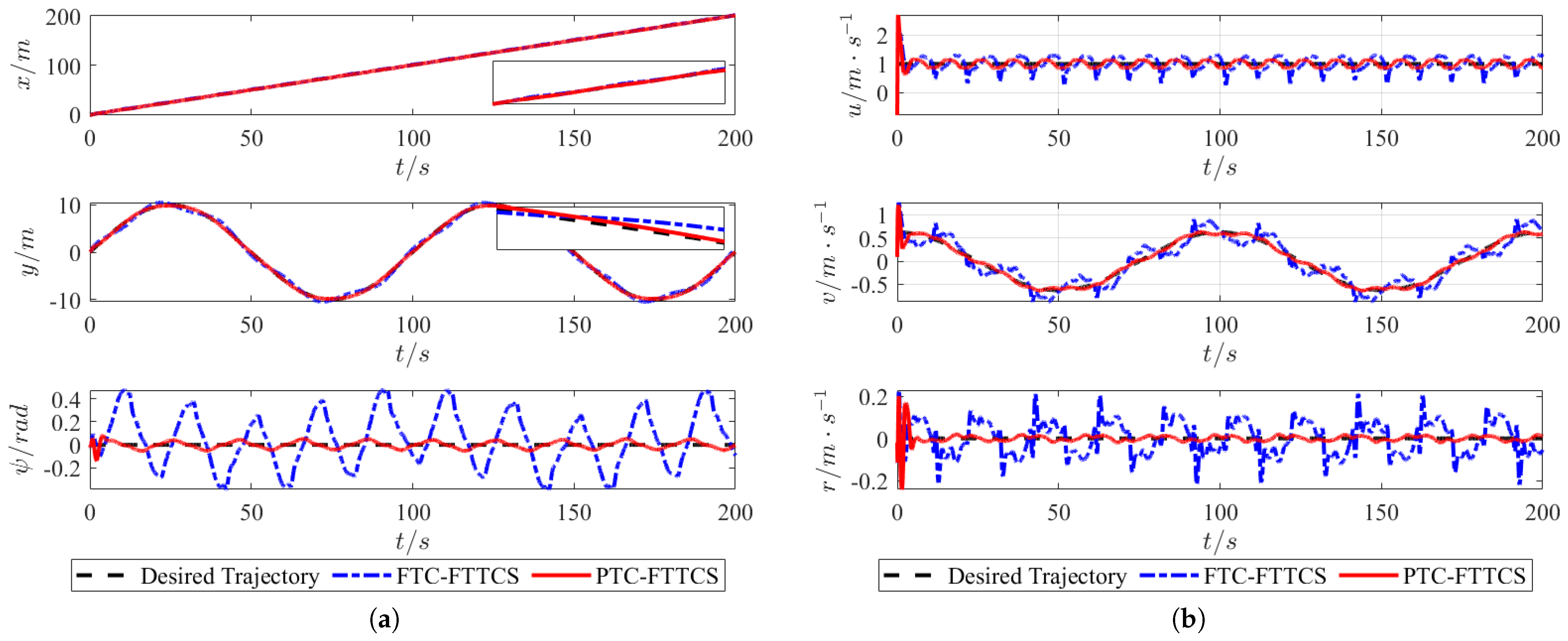
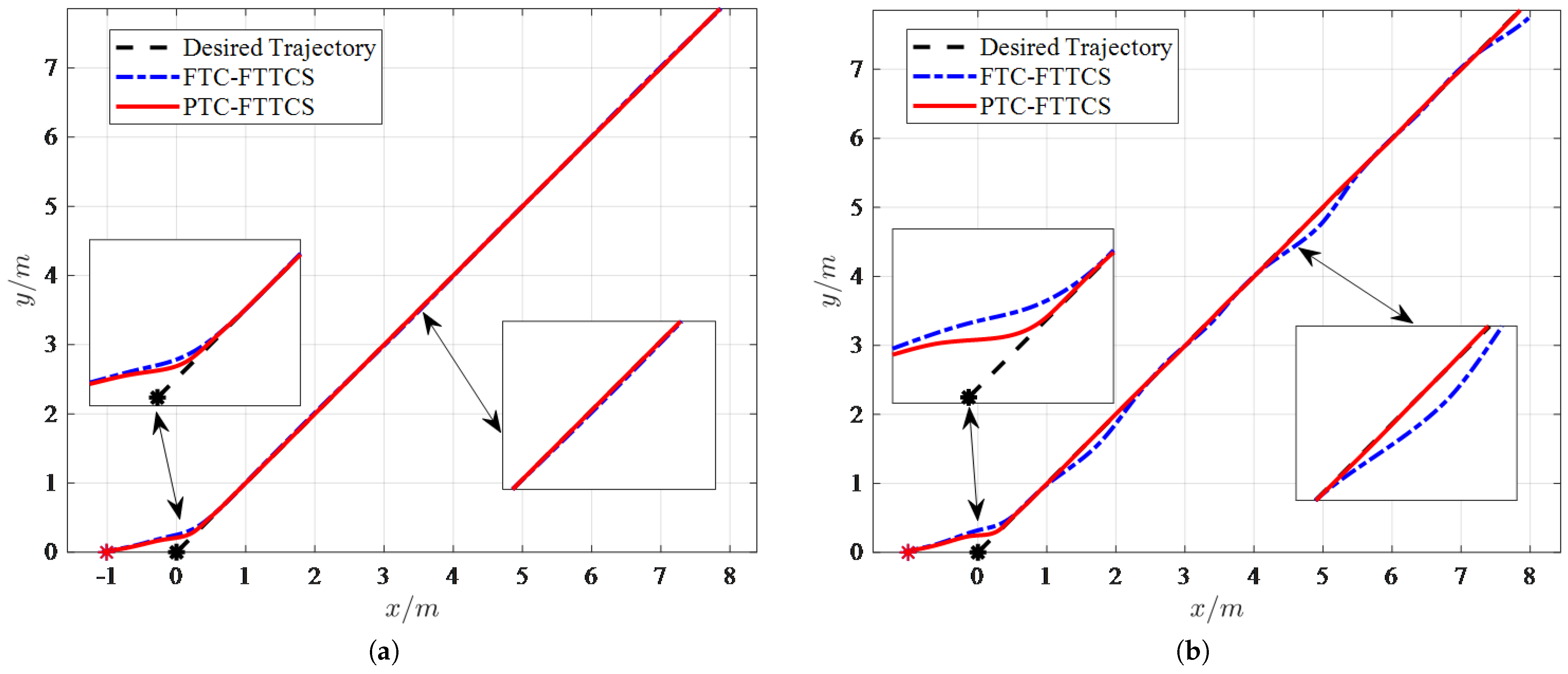
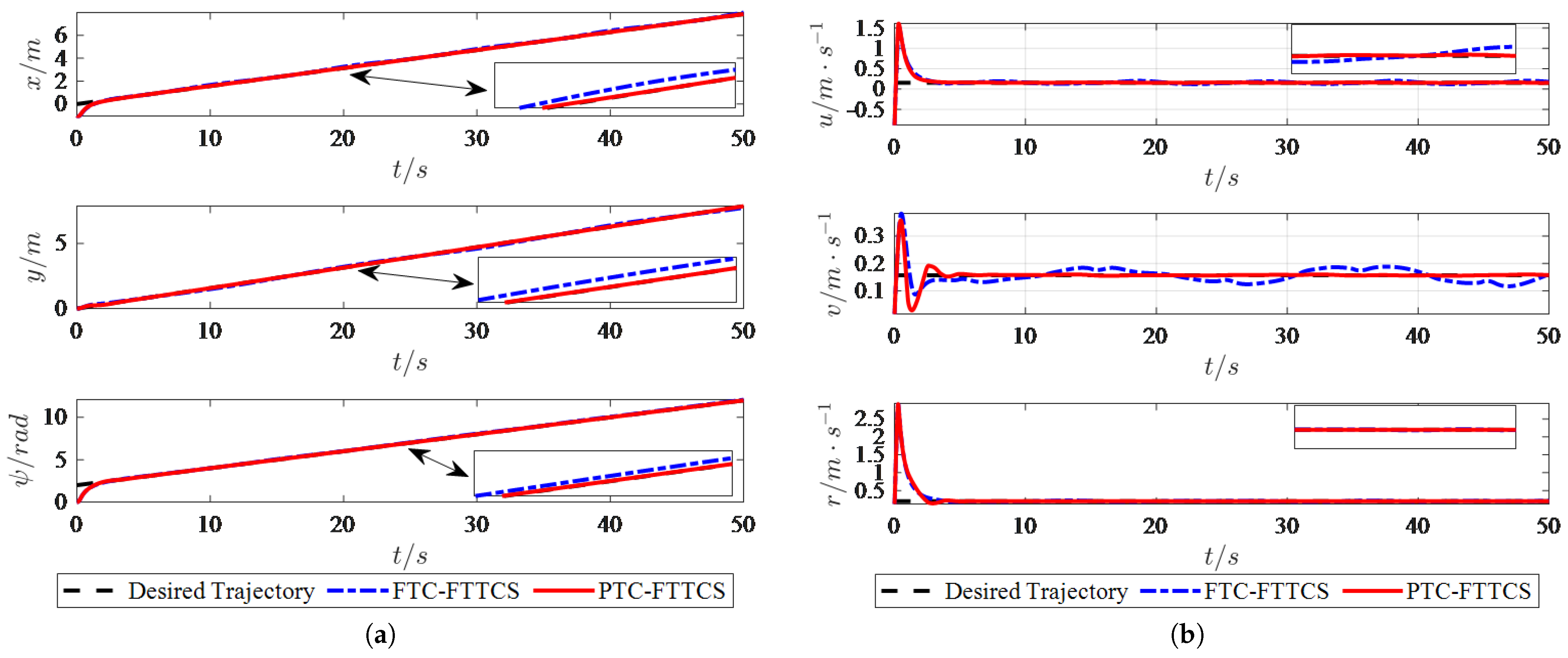
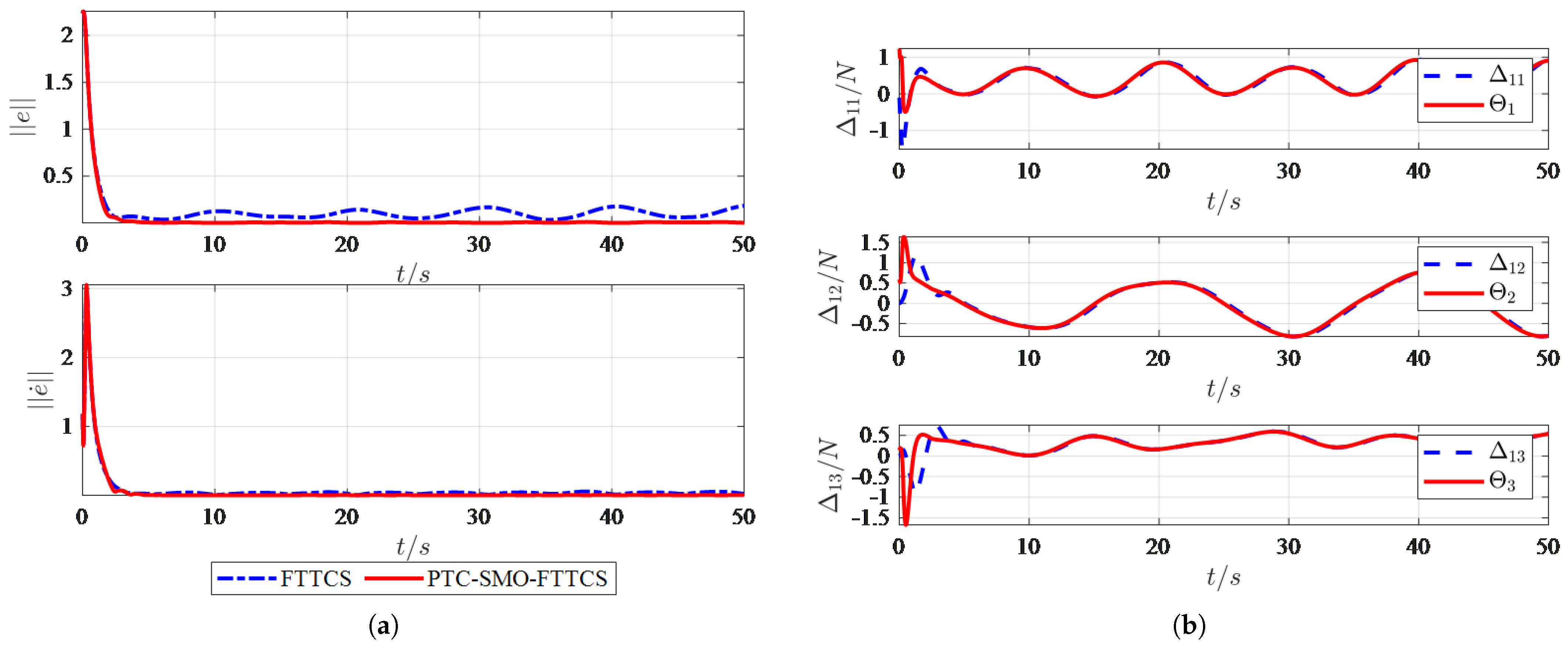
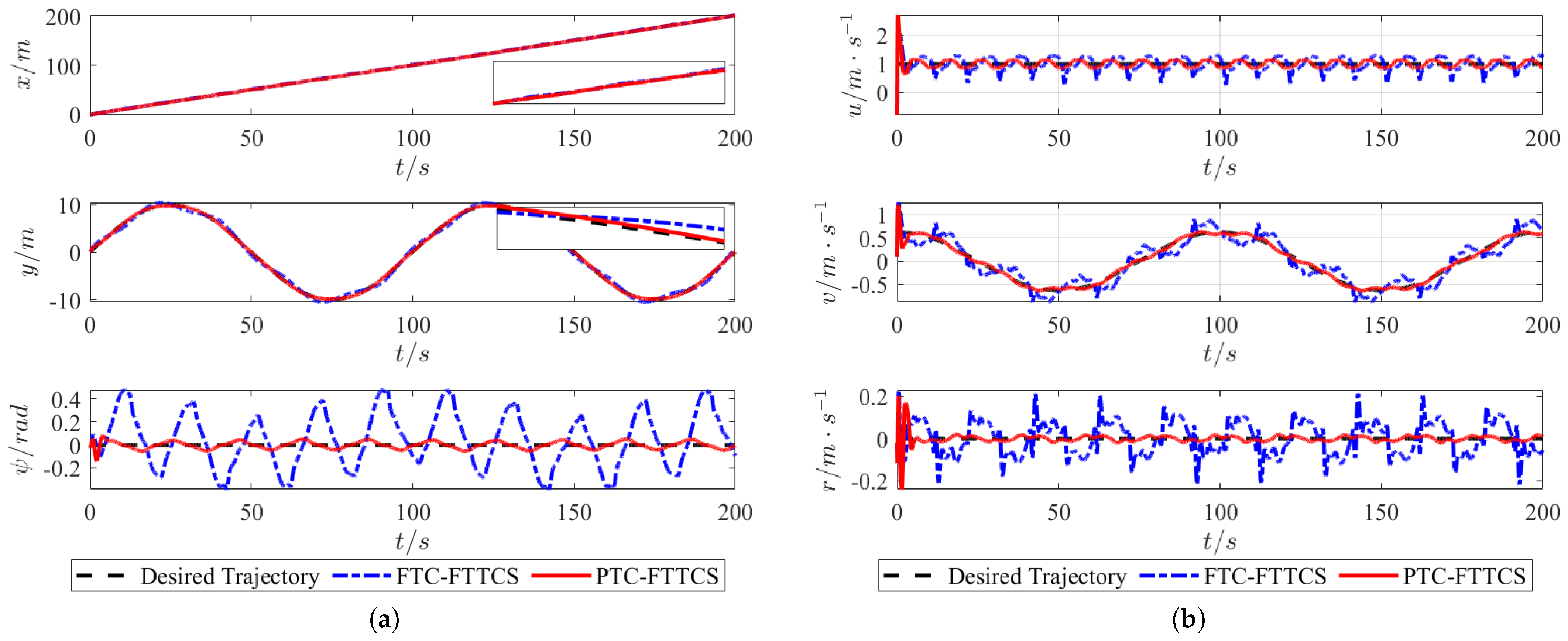
4.2. PTC-FTTCS and PTO-SMO with Complex Disturbances
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear Model Predictive Control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean. Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Sun, X.J.; Wang, G.F.; Fan, Y.S. Adaptive trajectory tracking control of vector propulsion unmanned surface vehicle with disturbances and input saturation. Nonlinear Dyn. 2021, 106, 2277–2291. [Google Scholar] [CrossRef]
- Mu, D.D.; Wang, G.F.; Fan, Y.S.; Qiu, B.B.; Sun, X.J. Adaptive Trajectory Tracking Control for Underactuated Unmanned Surface Vehicle Subject to Unknown Dynamics and Time-Varing Disturbances. Appl. Sci. 2018, 8, 547. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Castañeda, H.; Garrido, L. USV Path-Following Control Based On Deep Reinforcement Learning and Adaptive Control. In Proceedings of the Global Oceans 2020, Biloxi, MS, USA, 5–30 October 2020. [Google Scholar] [CrossRef]
- Feng, K.; Wang, N.; Liu, D.; Er, M.J. Adaptive Fuzzy Trajectory Tracking Control of Unmanned Surface Vehicles with Unknown Dynamics. In Proceedings of the IEEE 3rd International Conference on Informative and Cybernetics for Computational Social Systems, Jinzhou, China, 26–29 August 2016; pp. 342–347. [Google Scholar]
- Fan, Y.S.; Sun, X.J.; Wang, G.F.; Guo, C. On Fuzzy Self-adaptive PID Control for USV Course. In Proceedings of the 2015 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015; pp. 8472–8478. [Google Scholar]
- Mu, D.D.; Wang, G.F.; Fan, Y.S.; Sun, X.J.; Qiu, B.B. Adaptive LOS Path Following for a Podded Propulsion Unmanned Surface Vehicle with Uncertainty of Model and Actuator Saturation. Appl. Sci. 2017, 7, 1232. [Google Scholar] [CrossRef]
- Zhou, B.; Huang, B.; Su, Y.M.; Zheng, Y.X.; Zheng, S. Fixed-time neural network trajectory tracking control for underactuated surface vessels. Ocean. Eng. 2021, 236, 109416. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Qi, X.; Ma, Y.; Li, Z.X.; Malekian, R.; Sotelo, M.A. Path Following Optimization for an Underactuated USV Using Smoothly-Convergent Deep Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6208–6220. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Castañeda, H. Guidance and Control Based on Adaptive Sliding Mode Strategy for a USV Subject to Uncertainties. IEEE J. Ocean. Eng. 2021, 46, 1144–1154. [Google Scholar] [CrossRef]
- Yu, Y.L.; Guo, C.; Yu, H.M. Finite-Time PLOS-Based Integral Sliding-Mode Adaptive Neural Path Following for Unmanned Surface Vessels With Unknown Dynamics and Disturbances. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1500–1511. [Google Scholar] [CrossRef]
- Qu, X.R.; Liang, X.; Hou, Y.H.; Li, Y.; Zhang, R.B. Path-following control of unmanned surface vehicles with unknown dynamics and unmeasured velocities. J. Mar. Sci. Technol. 2021, 26, 395–407. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.; Zhang, J.Q.; Zhou, D.C.; Dong, J. Adaptive sliding-mode path following control system of the underactuated USV under the influence of ocean currents. J. Syst. Eng. Electron. 2018, 29, 1271–1283. [Google Scholar] [CrossRef]
- Wang, D.; Kong, M.; Zhang, G.; Liang, X. Adaptive second-order fast terminal sliding-mode formation control for unmanned surface vehicles. J. Mar. Sci. Eng. 2022, 10, 1782. [Google Scholar] [CrossRef]
- Fan, Z.P.; Xu, Y.J.; Fu, M.Y. Finite-time command filtered backstepping control for USV path following. Automatica 2023, 92, 173–180. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M.; Mnif, F.; Zhu, Q.M. Guaranteed Performance Design for Formation Tracking and Collision Avoidance of Multiple USVs With Disturbances and Unmodeled Dynamics. IEEE Syst. J. 2021, 15, 4346–4357. [Google Scholar] [CrossRef]
- Sánchez-Tones, J.D.; Sanchez, E.N.; Loukianov, A.G. Predefined-Time Stability of Dynamical Systems with Sliding Modes. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 5842–5846. [Google Scholar]
- Becerra, H.M.; Vázquez, C.R.; Arechavaleta, G.; Delfin, J. Predefined-Time Convergence Control for High-Order Integrator Systems Using Time Base Generators. IEEE Trans. Control. Syst. Technol. 2018, 26, 1866–1873. [Google Scholar] [CrossRef]
- Yang, Y.Q.; Ge, M.F.; Liang, C.D.; Xu, K.T.; Wang, L. Predefined-time formation control of NASVs with fully discontinuous communication: A novel hierarchical event-triggered scheme. Ocean. Eng. 2023, 268, 113422. [Google Scholar] [CrossRef]
- Liang, C.D.; Ge, M.F.; Liu, Z.W.; Gu, Z.W.; Chen, Q. Distributed predefined-time optimization control for networked marine surface vehicles subject to set constraints. IEEE Trans. Intell. Transp. Syst. 2023, 25, 2129–2138. [Google Scholar] [CrossRef]
- Liang, C.D.; Ge, M.F.; Liu, Z.W.; Ling, G.; Liu, F. Predefined-time formation tracking control of networked marine surface vehicles. Control Eng. Pract. 2021, 107, 104682. [Google Scholar] [CrossRef]
- Li, M.C.; Guo, C.; Yu, H.M. Filtered Extended State Observer Based Line-of-Sight Guidance for Path Following of Unmanned Surface Vehicles with Unknown Dynamics and Disturbances. IEEE Access 2019, 7, 178401–178412. [Google Scholar] [CrossRef]
- Wu, G.X.; Ding, Y.; Tahsin, T.; Atilla, I. Adaptive neural network and extended state observer-based non-singular terminal sliding modetracking control for an underactuated USV with unknown uncertainties. Appl. Ocean. Res. 2023, 135, 103560. [Google Scholar] [CrossRef]
- Li, X.S.; Li, X.C.; Ma, D.G.; Kong, X.W. Trajectory Tracking Control of Unmanned Surface Vehicles Based on a Fixed-Time Disturbance Observer. Electronics 2023, 12, 2896. [Google Scholar] [CrossRef]
- Song, J.; Niu, Y.G.; Zou, Y.Y. Finite-Time Stabilization via Sliding Mode Control. IEEE Trans. Autom. Control. 2017, 62, 1478–1483. [Google Scholar] [CrossRef]
- Moulay, E.; Lechappe, V.; Bernuau, E.; Defoort, M.; Plestan, F. Fixed-time sliding mode control with mismatched disturbances. Automatica 2022, 136, 110009. [Google Scholar] [CrossRef]
- Liu, Y.C.; Yan, W.; Zhang, T.; Yu, C.X.; Tu, H.Y. Trajectory Tracking for a Dual-Arm Free-Floating Space Robot With a Class of General Nonsingular Predefined-Time Terminal Sliding Mode. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 3273–3286. [Google Scholar] [CrossRef]
- Wu, C.H.; Yan, J.G.; Shen, J.H.; Wu, X.W.; Xiao, B. Predefined-Time Attitude Stabilization of Receiver Aircraft in Aerial Refueling. IEEE Trans. Circuits Syst. Express Briefs 2021, 68, 3321–3325. [Google Scholar] [CrossRef]
- Skjetne, R.; Smogeli, ∅.; Fossen, T.I. Modeling, identification, and adaptive maneuvering of Cybership II: A complete design with experiments. IFAC Proc. Vol. 2004, 37, 203–208. [Google Scholar] [CrossRef]
- Er, M.J.; Li, Z.K. Formation Control of Unmanned Surface Vehicles Using Fixed-Time Non-Singular Terminal Sliding Mode Strategy. J. Mar. Sci. Eng. 2022, 10, 1308. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Parm | Measurement | Parm | Measurement | Parm | Measurement |
|---|---|---|---|---|---|
| 23.8 kg | |||||
| 1.76 kg·m2 | −10.0 | ||||
| 0.046 m | |||||
| −0.7225 | −1.0 | ||||
| −1.3274 | 0.29 m | ||||
| −5.8664 | 1.225 m |
| Parm | Setvalue | Parm | Setvalue | Parm | Setvalue |
|---|---|---|---|---|---|
| 2 | s | 1200 | |||
| k | 1 | s | −5.870 | ||
| 1 | 2000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, G.; Zhang, J.; Wu, S.; Wang, Y. Predefined-Time Tracking Control of Unmanned Surface Vehicle under Complex Time-Varying Disturbances. Electronics 2024, 13, 1510. https://doi.org/10.3390/electronics13081510
Zhai G, Zhang J, Wu S, Wang Y. Predefined-Time Tracking Control of Unmanned Surface Vehicle under Complex Time-Varying Disturbances. Electronics. 2024; 13(8):1510. https://doi.org/10.3390/electronics13081510
Chicago/Turabian StyleZhai, Guanyu, Jundong Zhang, Shuyun Wu, and Yongkang Wang. 2024. "Predefined-Time Tracking Control of Unmanned Surface Vehicle under Complex Time-Varying Disturbances" Electronics 13, no. 8: 1510. https://doi.org/10.3390/electronics13081510