1. Introduction
The Internet of Vehicles (IoV) is a convergence of vehicular ad hoc networks (VANETs) and the Internet of Things (IoTs) that will enhance transportation efficiency and vehicle safety [
1]. Vehicles fitted with a wide range of advanced equipment generate a variety of computationally intensive applications, such as collision warning and driverless driving, which have stringent latency requirements. However, local processing in the vehicle can be affected by insufficient resources, resulting in performance degradation [
2]. How to ensure low-latency requirements for vehicles with limited resources is therefore a key challenge for IoV.
VEC has a promising application in intelligent vehicle applications as an extended application of edge computing in IoV [
3]. VEC improves vehicle computational performance by deploying MEC servers with high computational power in road side units (RSUs) to provide computational services. Specifically, computation-intensive application tasks can be offloaded from the vehicle over the wireless network and computed by MEC servers with more resources [
4]. MEC servers have greater computing power than vehicles, enabling the faster processing of application tasks and shorter application response times. For this reason, a growing number of researchers have started to focus on task offloading in VEC [
5].
Deep reinforcement learning (DRL) incorporates the perceptual and decision-making capabilities of deep learning and is a subfield of artificial intelligence. DRL is capable of solving problems that traditional reinforcement learning cannot in high-dimensional state and action spaces, and edge nodes utilizing DRL’s cognitive and analytical capabilities can interact directly with dynamic vehicular networks to reduce backhaul bandwidth and cached content delivery latency and enhance computational efficiency [
6]. Up to now, the effectiveness of DRL-based task-offloading optimization in VEC scenarios has been validated in several studies [
7,
8,
9].
However, the following issues still need to be explored. First, due to the high communication and storage costs of MEC servers, particularly when a high number of vehicles gather within their communication coverage, unloading vehicle tasks to MEC servers may have the opposite effect [
10]. In addition, the mobility of vehicles in a VEC network and the disparity in regional infrastructure deployments can lead to load imbalances between MEC servers. Appropriate offloading decisions for vehicle-generated tasks can effectively balance the load between edge servers, thus effectively improving the resource utilization [
11].
A Markov decision process (MDP) is a mathematical model for describing a decision-maker’s choice of an optimal policy in uncertain environments and is well suited for the complex and varied offloading environments of Telematics tasks. TD3 is an efficient and stable deterministic policy reinforcement learning algorithm and is easy to implement and suitable for high-dimensional continuous action spaces, and thus, it can be used to solve MDP problems. TOPSIS is a common and effective method in multi-objective decision analysis that accurately responds to gaps between evaluation options. On the basis of the above considerations, we design a task-offloading and load-balancing decision scheme based on DRL called TOLB. Our main contributions can be summarized as follows:
For the multi-vehicle and multi-server scenario in vehicular networking, a dynamic computational offloading problem is constructed as an MDP. The decision problem is then transformed into an optimization problem to minimize the system cost while guaranteeing the load balancing of the MEC servers.
In this study, we designed a novel jointly optimized task-offloading and load-balancing scheme, TOLB. TOLB designs a TD3-based task-offloading and resource allocation algorithm to obtain the best decision for task offloading, and it uses a TOPSIS-based server selection algorithm to select low-load MEC servers to which high-load MEC servers can migrate the tasks and achieve load balancing through edge collaboration.
We have carried out some comparative experiments to evaluate how the proposed scheme performs. Compared to the benchmark scheme, the findings reveal that the proposed scheme can better optimize the processing power of the MEC server and lower the system cost.
The remainder of this paper is structured as follows:
Section 2 analyzes related work,
Section 3 discusses the system network architecture and optimization issues,
Section 4 details the specifics of the TOLB scheme,
Section 5 evaluates the experimental performance, and
Section 6 concludes the paper.
2. Related Work
The transfer and computation of computationally intensive tasks between the vehicle and the MEC server not only consume energy but also generate time delays [
12,
13]. Optimization schemes for the delay and energy consumption incurred by tasks during execution have become a crucial research direction in task-offloading studies [
14]. Numerous task-offloading methods have been proposed for offloading studies of latency-sensitive and high-complexity tasks in VEC.
Ning et al. [
15] considered edge collaboration in an intersection scenario by using Lyapunov optimization to minimize the entire task computation latency of vehicles under the RSU’s persistent energy consumption. Zeng et al. [
16] analyzed the dynamic between an MEC server and a vehicle according to the Stackelberg game, proving the existence of an optimal offloading policy between the two entities; they also designed a rapid search algorithm using a genetic algorithm to find the optimal MEC server pricing strategy. Liu et al. [
17] presented a distributed algorithm using the Stackelberg game with multiple leaders and followers to improve the utility of mobile vehicles and MEC servers under deadline constraints. Lin et al. [
18] explored a heterogeneous VEC network, leveraging task popularity among vehicles for dynamic clustering, and proposed an online vehicle task-offloading solution based on bandit context clustering. Luo et al. [
19] designed a self-learning-based distributed computing offloading algorithm to solve the distributed offloading decision game and minimize the computational cost of performing the task. However, traditional optimization algorithms require several iterations to reach a relatively optimal solution, which can cause unacceptable delays in realistic application scenarios [
20].
The application of DRL to address the challenges of task offloading has gained attention in recent years. Wang et al. [
21] aimed to minimize the delay of each task and developed a deep learning-based resource allocation method to adapt to changing MEC environments and handle high-dimensional inputs. Pang et al. [
22] considered multitasking offloading and designed a time-optimized Dueling Double Deep Q Network (D3QN)-based multitasking offloading algorithm to decrease the latency and energy consumption of the system. Zheng et al. [
23] developed an asynchronous dominant participant–critic-based decision-making algorithm in a digital twin network framework aiming at fast convergence and reduced system cost. Shi et al. [
10] proposed an offloading algorithm based on a dual-depth Q network to solve the problem of offloading subtasks between vehicles and subtasks between vehicles and edge nodes with the aim of reducing the subtask packet loss rate, the average task delay, and the total energy consumption. Liu et al. [
24] accounted for dependencies between subtasks by modeling these dependencies with a directed acyclic graph and proposed a task-offloading algorithm based on a deep deterministic policy gradient (DDPG). Peng et al. [
14] allowed different vehicles to share the results of similar tasks and designed a shared offloading strategy based on DRL. Shi et al. [
25] developed a smart-contract-based vehicular task allocation scheme within a lightweight blockchain-based VEC framework and utilized DRL to determine the resources required to perform a task, and dynamic pricing was used to incentivize vehicles to make idle resources available. Long et al. [
26] designed a power allocation scheme based on decentralized DRL in a non-orthogonal multiple-access communication scenario with multiple inputs and outputs. These DRL-based schemes focus primarily on offloading decisions.
To model system utility, Dai et al. [
27] formulated the optimization problem as a mixed-integer nonlinear programming problem and decoupled it into two subproblems: load-balancing and offloading decisions. Fan et al. [
2] used an exact potential game model to simulate the task-offloading contest process among RSUs by decomposing the optimization problem into partial task-offloading and channel allocation subproblems and a server-load-balancing subproblem. Lu et al. [
28] developed a multi-RSU workload-balancing scheme that adjusts to variable task popularity in dynamic environments to avoid wasting resources by offloading duplicate tasks. Gao et al. [
29] constructed task-offloading, task-scheduling, and Central Processing Unit (CPU) frequency allocation problems as a hybrid nonlinear optimization problem and adopted an iterative optimization algorithm based on a Deep Q Network (DQN) and gradient descent to obtain the optimal decision. Marios et al. [
30] designed a two-stage reinforcement learning-based computational offloading scheme, where the first stage designed a stochastic learning automata-based task-offloading decision, and the second stage designed a DQN-based cooperative offloading mechanism for edge sites to achieve load balancing. Wu et al. [
31] proposed a bionic algorithm based on Invasive Tumor Growth optimization, which achieves multiple goals, such as load balancing and a reduction in energy consumption through collaboration between edge servers.
The existing research mainly focuses on the task-offloading problem in IoV, with relatively little research on the load-balancing problem of the system, while the task-offloading research on joint load balancing mostly considers the complete offloading of tasks, which reduces the utilization of system resources. Therefore, this study proposes a DRL-based task-offloading and load-balancing scheme. It splits the task into two parts according to a certain ratio, executes one on the vehicle server and the other on the MEC server, and allocates the computational power for executing the task to the vehicle and MEC servers. In addition, it considers the load state of the edge servers and migrates the tasks from high-load MEC servers to low-load MEC servers for execution, which minimizes the system cost, effectively improves the system resource utilization, and achieves load balancing.
3. System Model
This section first outlines the offloading framework of the VEC system. Subsequently, a computational model is presented, encompassing local computation, task transfer, edge computation, and result return. This model aims to calculate task processing latency and energy consumption. The final section outlines the optimization objectives and constraints of this study.
3.1. System Framework
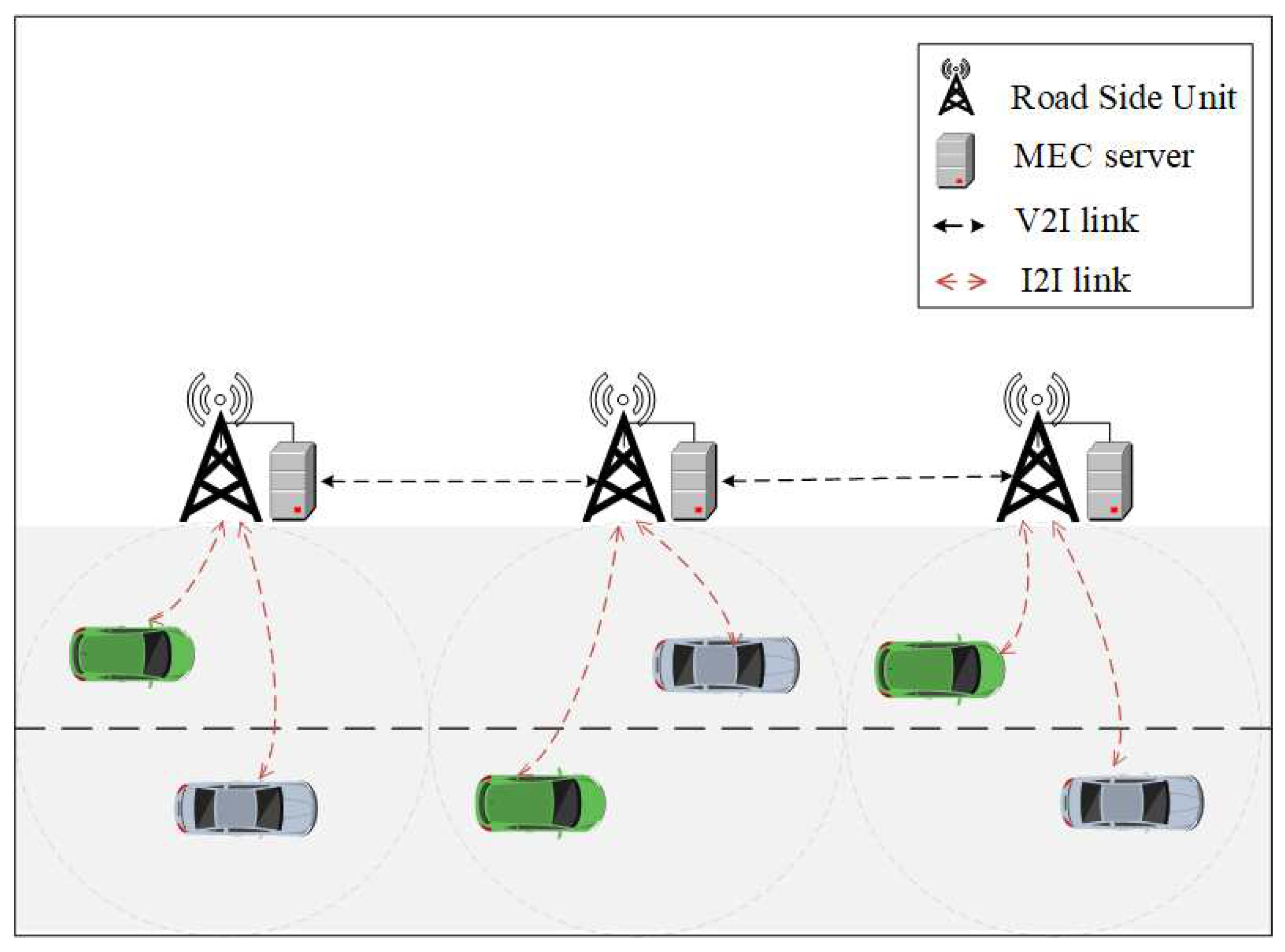
The architecture of the VEC system is illustrated in
Figure 1. The system is designed around a unidirectional straight road, with RSUs positioned sequentially along the roadside. RSUs are equally spaced along the road, and the wireless communication coverage of the RSU is represented by
. Each RSU houses an MEC server, where the ensemble of MEC servers is indicated by
. The resource margin of the MEC server
is denoted by
. MEC servers with ample resources are identified as low-load servers, whereas those with limited resources are classified as high-load servers.
The system contains vehicles traveling at a constant speed, with the vehicle set represented by . We segment the travel time of vehicles within the current communication coverage of the road into individual time slots, denoted by . In each time slot, a vehicle generates a task for processing. The task generated by vehicle is indicated by , where denotes the total data volume of the task in bits, indicates the computational density of the task in CPU cycles per bit, and is the upper limit of the delay that the task can tolerate.
In this paper, it is assumed that each task can be split and that the vehicle can offload part of the task to the MEC server in any proportion. is the offloading ratio of task . The amount of task data processed by MEC server is , and the amount of data processed by vehicle is .
3.2. Communication Model
3.2.1. V2I Communication
In the system network model studied in this research, the unloading vehicle needs to transmit the task to the MEC server for execution through the wireless channel, which must take into account the data transfer rate of the task in the channel. In addition, there exists an edge collaboration model for the MEC servers in the system proposed in this section, where the high-load servers can migrate the tasks to the low-load servers for task processing. Therefore, V2I communication and I2I communication must be considered for this system.
This study assumes that the wireless network connection state of the vehicle remains static during data upload. The data transmission rate between vehicle
n and the MEC server is given by
where
is the uplink channel bandwidth between vehicle
and MEC server
,
is the transmission power of vehicle
,
is the channel gain,
denotes the Gaussian white noise power, and
represents the radio interference emitted by other vehicles within the communication range of MEC server
.
3.2.2. I2I Communication
When the load of MEC server
is too high, MEC server
must migrate the tasks to a low-load MEC server
. Since the data transfer between MEC servers is performed via I2I, the data transfer rate is extremely large compared to V2I; thus, this study neglects the latency and energy consumption during task migration [
32].
3.3. Computing Model
The total latency of the execution of the processing task consists of the transmission latency and the computation latency, the total energy consumption of the processing task consists of the transmission energy and the computation energy, and the computing model for executing the task is varied for different locations. According to the different execution modes of tasks, the computation model in the research scenario of this paper can be obtained.
3.3.1. Local Computing Model
For the locally computed section of the task,
denotes the computing power allocated by the system to tasks executed locally, where
is the highest computing power of vehicle
. The local delay of the processing task is given by
The local energy consumption of vehicle
’s running task is expressed by
where
denotes the computational density of the task,
indicates the amount of task data processed locally, and
is the energy dissipation factor for vehicle
[
33].
3.3.2. Edge Computing Model
When vehicle
offloads tasks to MEC server
, the amount of transmitted task data is
. The task transmission delay is given by
where
is the rate at which vehicle
communicates with MEC server
.
The energy consumption during task transfer is given by
where
is the transmission power of vehicle
.
denotes the computational capacity (in CPU cycles/second) allocated by the system for tasks executed on MEC server
, where
denotes the maximum computational capacity of MEC server
. The computing latency of the offloaded task is expressed by
The energy consumption by MEC server
to execute tasks is defined as follows:
where
equals the computational density of the task,
denotes the amount of offloaded data for the task, and
is the energy dissipation factor of MEC server
[
33].
As the calculation results are very small compared to the amount of input data, this paper ignores the latency and energy consumption of returning the computational results.
3.4. The Formulation of the Problem
As previously mentioned, for task
, the computing latency includes both the local and offloaded parts. The total computing latency of task
can be described as
The overall energy consumption can be calculated as
Hence, the system cost of task
’s execution can be given by
where
and
are the weight factors for the delay and energy consumption to indicate how much the user values delay and energy, respectively, satisfying the constraint
. Depending on the vehicle user’s requirements, the values of these weighting factors can be adjusted for decision-making.
The aim of optimizing this system is to keep system costs to an absolute minimum while ensuring the load balancing of the MEC servers. The optimization problem is formulated as follows:
Constraint (12) ensures that the task completion latency is never greater than the maximum latency constraint tolerated by the task. Constraint (13) sets a limitation on the offloading decision variable, ensuring that the rate of task offloading is between 0 and 1. Constraint (14) ensures that the computational power allocated by the system to the tasks is positive. Finally, constraint (15) ensures that the volume of task data transferred from the system to the MEC servers does not exceed the maximum load capacity of the system.
4. A Task-Offloading and Load-Balancing Decision Scheme Based on DRL
Owing to the high agility of vehicles, real-time offloading decisions need to be made based on the current network environment [
34]. The dynamically changing environment of Telematics may lead to the uncertainty of system inputs and conditions, and the task-offloading and resource allocation algorithms should take the time-varying environment state into full consideration in order to make better decisions. Deep reinforcement learning can continuously optimize its own model according to feedback from the environment to adjust to the demands of multiple scenarios and tasks, and this algorithm is especially suitable for scenarios where the environment state is constantly changing; deep reinforcement learning is able to adapt to such changes through real-time exploration to obtain the best decision. Therefore, TOLB uses the TD3 algorithm to learn the environment model and the task-offloading and resource allocation strategies and then applies the TOPSIS-based server selection algorithm to select the low-load MEC servers to which the high-load MEC servers can migrate the tasks. TOLB is able to allocate resources in real-time changing environments, boosting the performance and robustness of the system, and TOLB also monitors the load state of the MEC servers, which significantly optimizes the system in terms of reduced latency, lower power consumption, and higher resource utilization.
4.1. MDP Model
An MDP is a sequential decision-making framework characterized by time-dependent and state-dependent properties. This study introduces three key elements into the MDP model.
4.1.1. State
In VEC, the state space contains information about several key vehicle and MEC server characteristics. The process of neural network training is significantly influenced by the variability and uncertainty of the value range of different task types, impacting the stability and convergence of the system. Therefore, we normalize the state values, defining the state
of time slot
as follows:
where
denotes the position of each vehicle within time slot
, and
is the communication coverage of the RSU.
indicates the task produced by each vehicle during time slot
, and
denotes the maximum value of the task data volume.
denotes the resource margin of each MEC server in time slot
, and
represents the maximum resource capacity of the MEC server.
4.1.2. Action
The purpose of the agent is to have the state space mapped to the action space. To maximize the immediate payoff, the intelligent entity selects an action depending on the system state
during time slot
, determining the offload ratio of the task and the computational power assigned to the offloaded subtask. The action
is denoted by
where
denotes the task offload rate for each task during time slot
,
denotes the computing power allocated by the system to the task to execute locally during time slot
, and
represents the computing power assigned by the system to run the task locally and on the MEC server during time slot
.
4.1.3. Reward
On the basis of the current action
, the agent obtains a reward via the environment. The optimization goal of this system is to minimize the cost of the system; thus, the lower the weighted sum of the execution delay and energy consumption of the execution task, the better the action decision. The reward function is represented by
4.2. TD3-Based Task-Offloading and Resource Allocation Algorithm
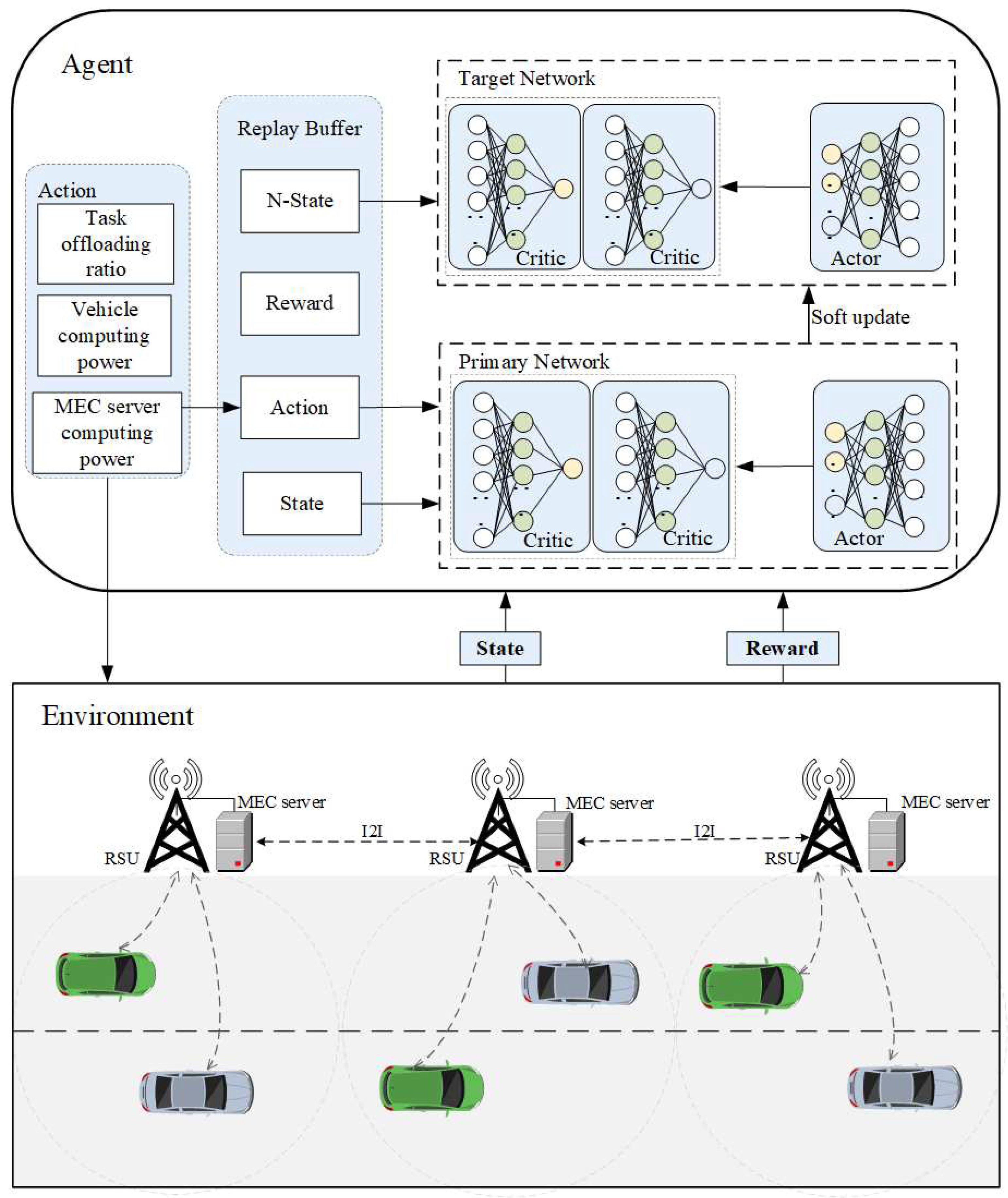
Considering that the IoV environment changes all the time, in an effort to find the optimal task-offloading and resource allocation decision in the complex and changing environment, TOLB has designed a task-offloading and resource allocation algorithm based on TD3, the architecture of which is displayed in
Figure 2.
The TD3 algorithm has three components, including the primary network, the target network, and the experience pool. The primary network is built from two critic networks and one actor network. The TD3 agent in the VEC system maps the state space, which consists of information about the main features of the vehicle and the MEC server, to the action space. The actor network generates exploration strategies, and the two critic networks evaluate the strategies. The primary network’s inputs are the initial state of the system, the state of the training process, and a summary of the training actions stored in the replay buffer. The outputs are actions consisting of the offload ratio of the task and the computational power to perform the task. The target network facilitates the training process of the primary network and calculates the target value. The replay buffer, on the other hand, records the states, actions, and rewards experienced by the TD3 agent during the learning process for the actor network to be trained. The TD3 agent is able to obtain action strategies with increasingly better reward values through the trial and error of continuous interaction between the agent and the system environment and to attain the optimization goal of minimizing the average cost of the system. The running process of the TD3-based task-offloading and resource allocation algorithm is presented below.
First, three networks, the critic network , the critic network , and the actor network , are initialized with randomized parameters , , and . Next, the three target networks are initialized accordingly for the above three networks. Subsequently, the parameters of the target network are taken from the primary network such that , , and , while the replay buffer , which stores the experience of various actions, is initialized.
Each state
in the set selects an action
on the basis of the current policy and noise. To execute the action, the vehicle offloads a partial task to the MEC server, then the vehicle computes the partial task that is processed locally, and the MEC server computes the offloaded partial task. The TD3 agent observes the next state
and receives an instant reward
.
is then placed in
for training. Once the number of training experiences in
reaches a certain threshold, a batch of data of size
will be randomly selected from
.
is computed at state
according to Equation (19), and the Q-target value is obtained according to Equation (20). The formula is denoted by
where
restricts
to the range between
and
, and
represents the target actor network.
Simultaneously, the Q-values are evaluated. The critic network update operation is described as follows:
The strategy for the TD3 actor network utilizes a delayed update approach, whereby the actor network is updated after step
, and
is updated through a deterministic policy gradient, as expressed below:
Eventually, the target network is updated through a soft update method described as
where the soft update factor is denoted by
.
Algorithm 1 outlines our proposed TD3-based task-offloading and resource allocation algorithm.
| Algorithm 1 TD3-based task-offloading and resource allocation algorithm |
Input:
Output:- 1:
Initialize the network parameters and randomly. - 2:
To initialize the parameters of target networks, press and - 3:
To initialize the replay buffer - 4:
for each episode do - 5:
for each time slot do - 6:
Define the current round’s noise and initialize the first state . - 7:
Select an action on the basis of the current policy and action noise . - 8:
Perform the action and gain reward and the next state . - 9:
Save in the replay buffer . - 10:
Batches of data are randomly selected from the replay buffer . - 11:
According to Equation (19), we obtain . - 12:
According to Equation (20), we obtain . - 13:
Updating critics through Equation (21). - 14:
If the delayed update condition is satisfied. - 15:
Update through Equation (22); - 16:
Update the target network through Equations (23) and (24). - 17:
end for - 18:
end for
|
4.3. TOPSIS-Based Server Selection Algorithm
When the offload task arrives at MEC server , if MEC server has sufficient resources, the task can be executed immediately. Otherwise, the system will select appropriate low-load servers for task migration, and the tasks will be handled by the low-load MEC servers in the way of edge collaboration, with the computation output returned to MEC server to fulfill the load balancing of the MEC servers.
TOLB uses a TOPSIS-based server selection algorithm to pick low-load servers for task migration processing. This selection process involves a comprehensive multi-indicator evaluation, where the TOLB evaluation model first considers the server’s available resource margin and distance as evaluation indicators. It then applies AHP to assign different weights based on the importance of each evaluation indicator in the system. Finally, the TOPSIS technique is adopted to calculate the comprehensive evaluation scores of each MEC server, and the MEC server with the highest comprehensive evaluation score is the best selection. The TOPSIS-based server selection algorithm comprises the following steps.
When MEC server
is under a high load, each of the other servers in the system becomes an option, with the distance between these servers and the available resource margin used as evaluation metrics, with their matrix defined by
. A shorter distance between other servers and
and a larger available resource margin of the other servers are indicators of a better option. The bigger and better and smaller and better indicators can be normalized using Equations (25) and (26) to obtain the normalization matrix
.
Considering the task’s latency sensitivity and the MEC server’s load, the available resources are prioritized among the evaluation metrics, and their importance is increased. The metric weight vector is computed using AHP.
The weights
obtained via AHP are then multiplied by the normalization matrix
to derive a weighted normalization matrix.
The optimal and worst samples are determined according to the following formulas:
The Euclidean distances between every sample and the highest and lowest samples are calculated using Equations (30) and (31).
Equation (32) is utilized to obtain the ratings for each evaluator.
Based on the magnitude of
, each evaluation object is ranked, with a larger value indicating closer proximity to the ideal condition. Ultimately, the server with the highest value is taken as the migration object. Algorithm 2 demonstrates the implementation of the TOPSIS-based server selection algorithm.
| Algorithm 2 TOPSIS-based server selection algorithm |
Input: MEC server location, total resources, computing power
Output: MEC servers with the highest overall evaluation value- 1:
Form evaluation objects and indicators into a matrix. - 2:
Harmonize the types of evaluation indicators and the positive orientation of indicators. - 3:
Normalize matrices that have been normalized using Equations (25) and (26). - 4:
Determine indicator weights using hierarchical analysis. - 5:
Multiply the normalization matrix by the resulting weights via Equation (27) to obtain the weighted normalization matrix. - 6:
Calculate the optimal and worst samples according to Equations (28) and (29). - 7:
By using Equations (30) and (31), calculate the Euclidean distances from each sample to the best and worst samples. - 8:
Calculate the score of each evaluation object according to Equation (32). - 9:
Select the highest-rated evaluator.
|
6. Summary
In this paper, we examine a multi-vehicle and multi-server environment under VEC and propose a deep reinforcement learning-based computational offloading and load-balancing decision-making scheme. This scheme enhances system stability by optimizing the offloading strategy of tasks while maintaining the server load balance. Specifically, this paper first models the dynamic interaction between the vehicle and the VEC server as an MDP and defines the weighted sum of the delay and energy consumption from executing the task as the system cost; then, the optimal policy is determined using the TD3-based task-offloading and resource allocation algorithm; and finally, the server load problem is considered, and for highly loaded servers that need to be processed for task migration, the optimal edge server collaboration object is selected using the TOPSIS-based server selection algorithm to achieve the minimization of the system cost under server load balancing. Simulation experiments demonstrate that the proposed TOLB scheme significantly reduces the task processing delay and energy consumption, decreases the likelihood of VEC server load imbalance, and enhances system performance. However, this scheme only considers task offloading while the vehicle is within the current RSU communication range and ignores the situation where the vehicle enters the next RSU communication range during task offloading and computation. Therefore, the situation where the vehicle enters the next RSU communication area during the data transfer and waits for the return of the computation results will be considered in future research.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}