
Kinematic Modeling with Experimental Validation of a KUKA®–Kinova® Holonomic Mobile Manipulator




Abstract
:1. Introduction
2. Devices and Mathematical Models
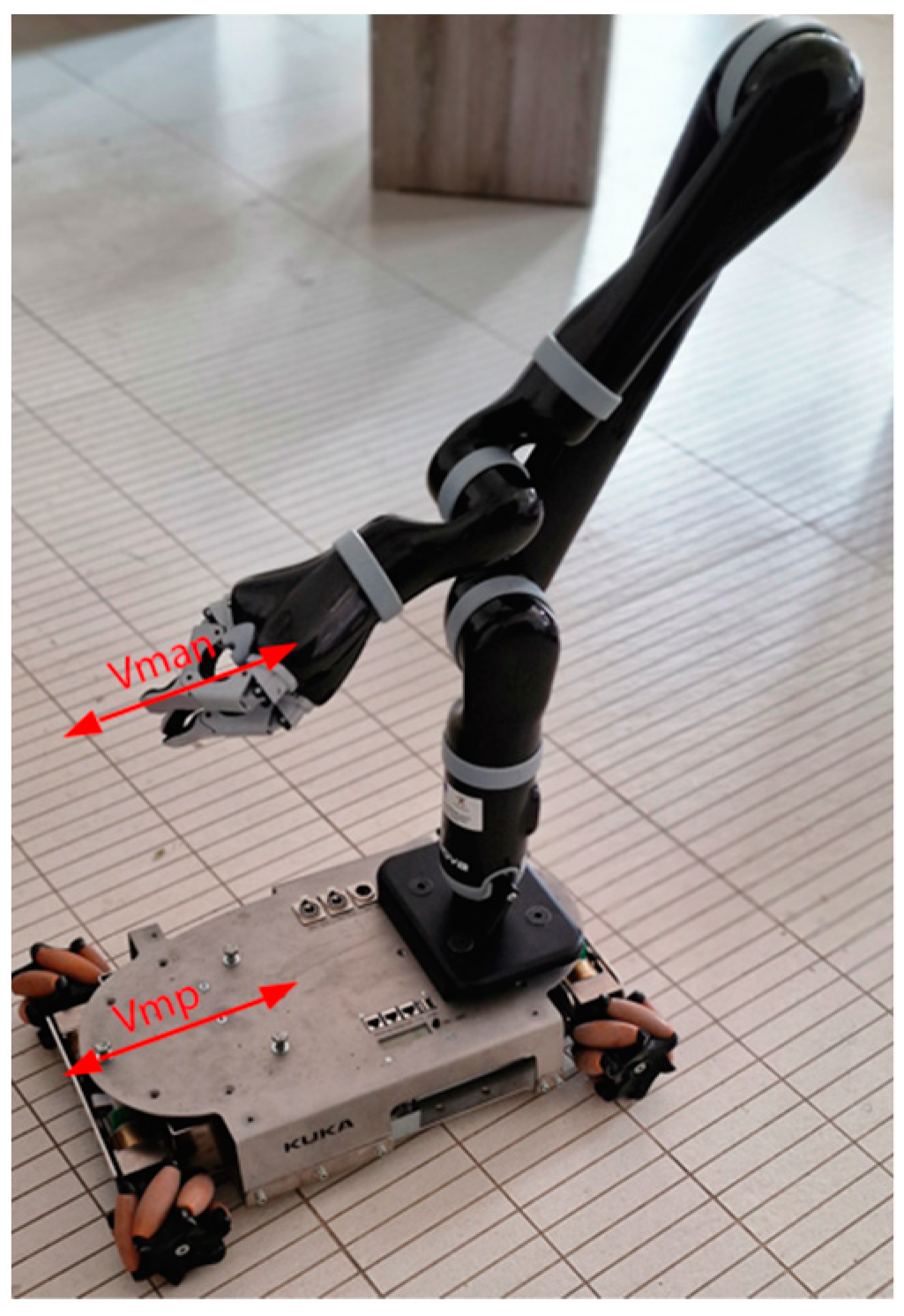
2.1. The Mobile Manipulator
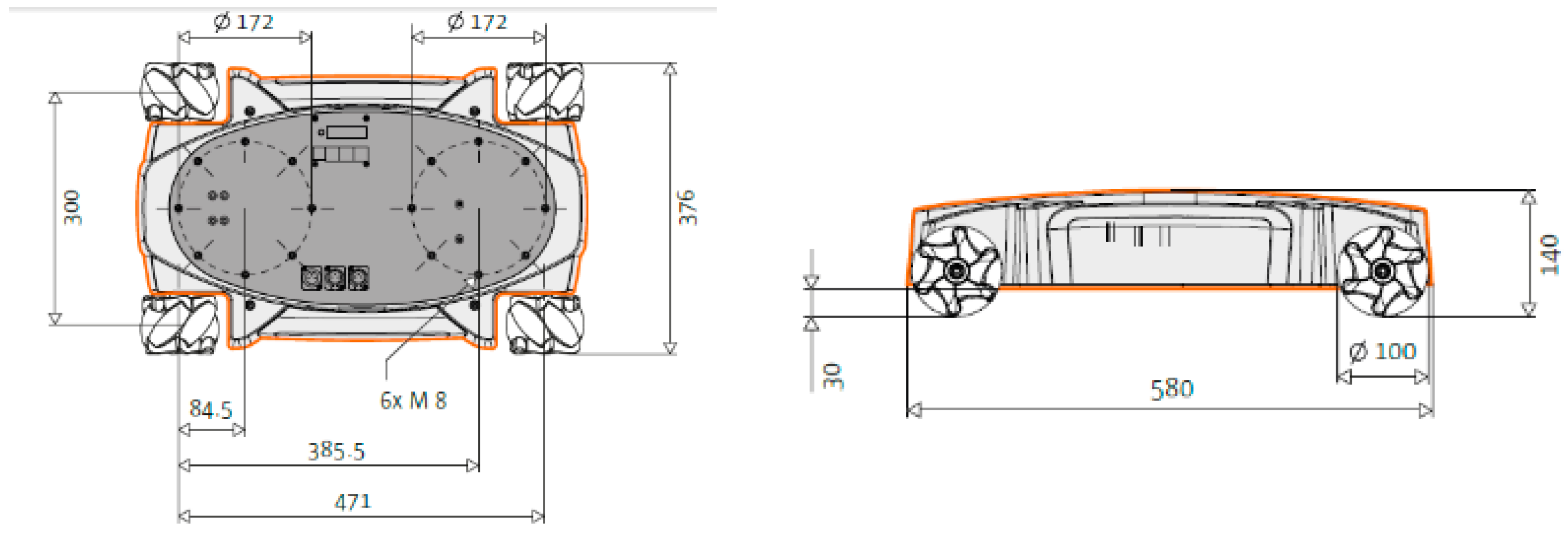
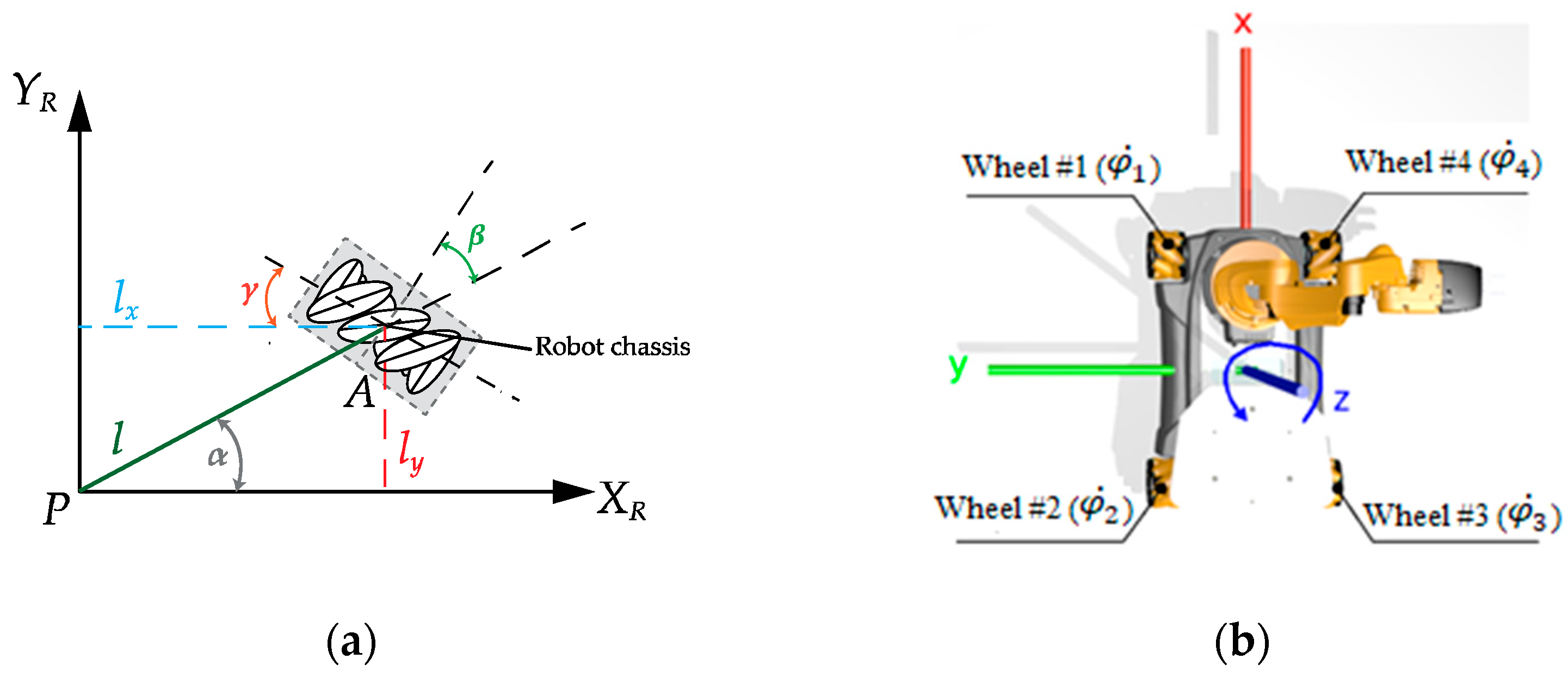
2.2. The Mobile Platform KUKA youBot
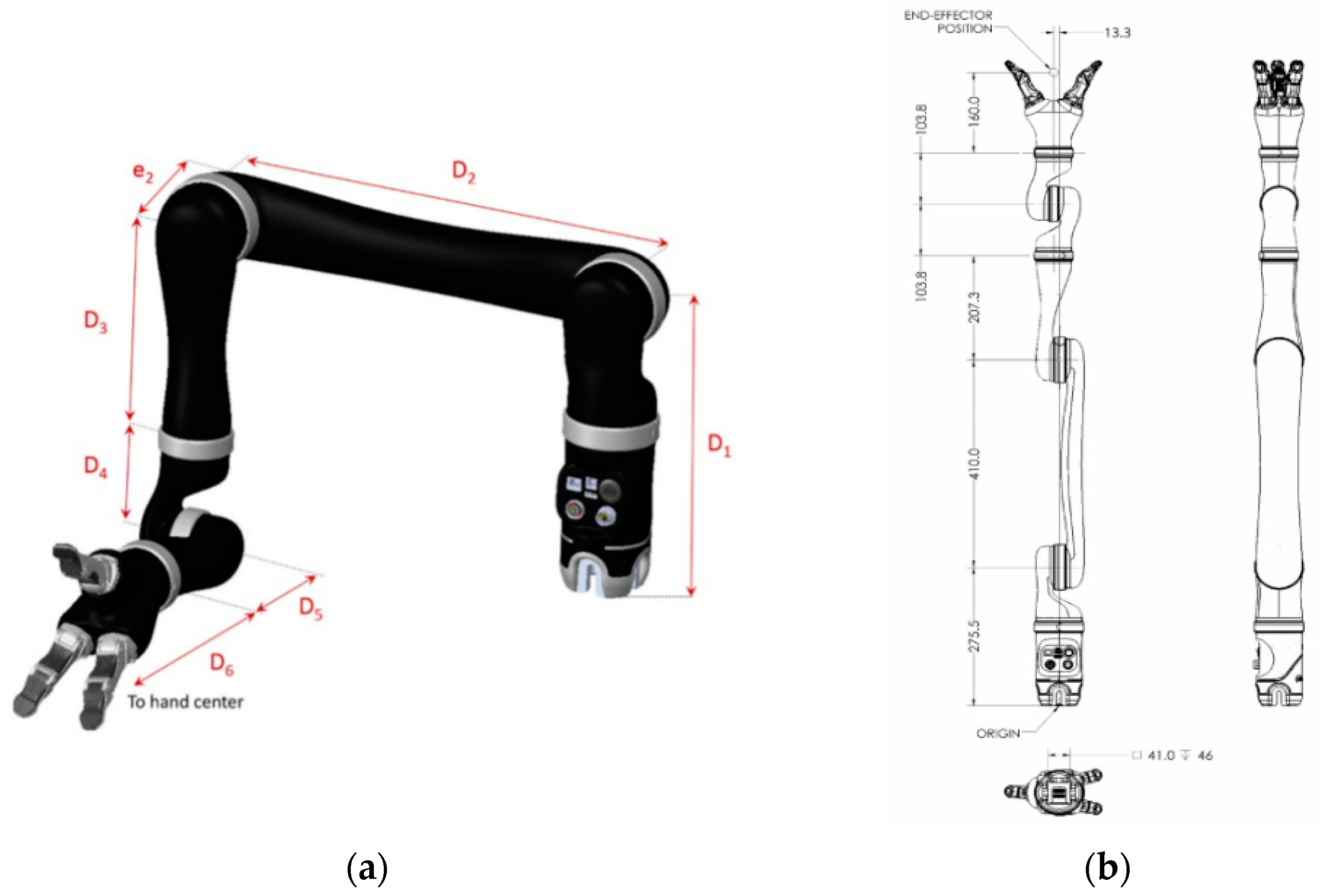
2.3. The Manipulator KINOVA Jaco Gen 2
The Manipulator Jaco Gen 2 Inverse Kinematics
- Locate the intersection point of the last three joint axes;
- Calculate the position of this intersection point, given that we know the desired position and orientation of the end-effector;
- Solve inverse kinematics for first three joints;
- Compute and determine ;
- Solve the inverse kinematics for the last three joints.
2.4. The Designed Mobile Manipulator’s Common Chain of Frames
2.5. Jacobian
2.5.1. Linear Velocity
2.5.2. Rotational Velocity
2.5.3. Motion of the Robot’s Links
2.6. Maintaining the Constant Position of the Manipulator’s Gripper While the Mobile Platform Is Moving
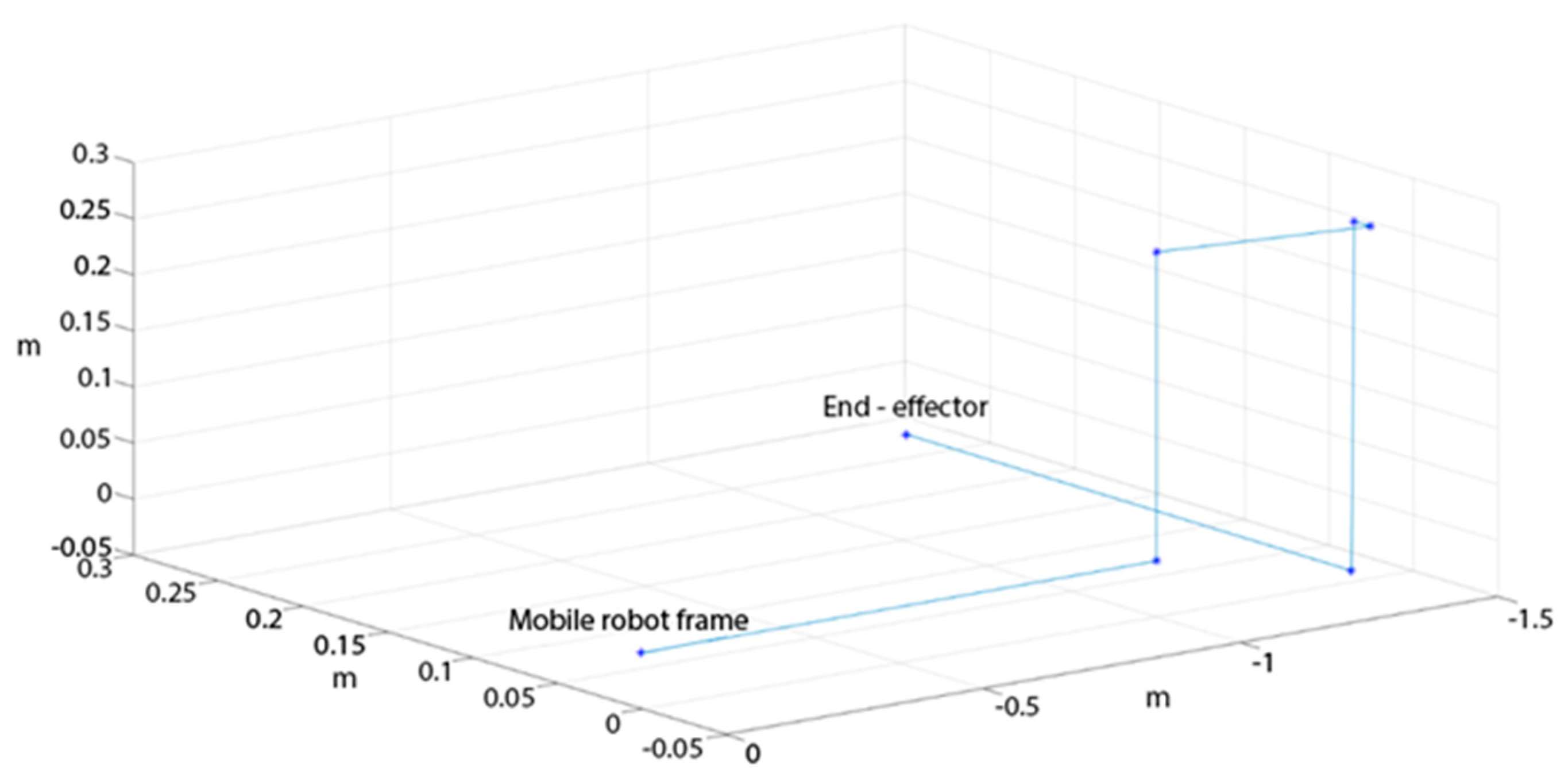
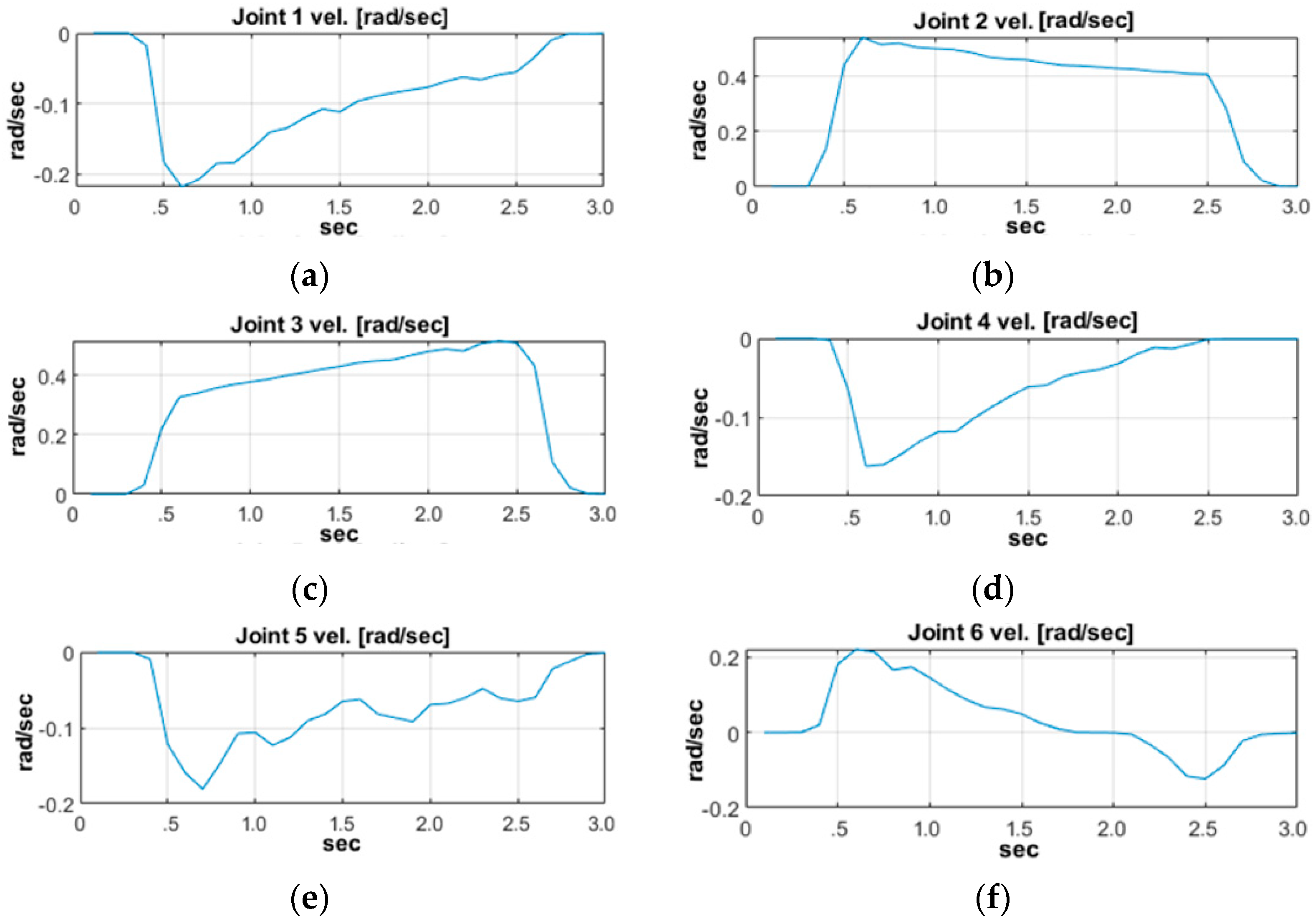
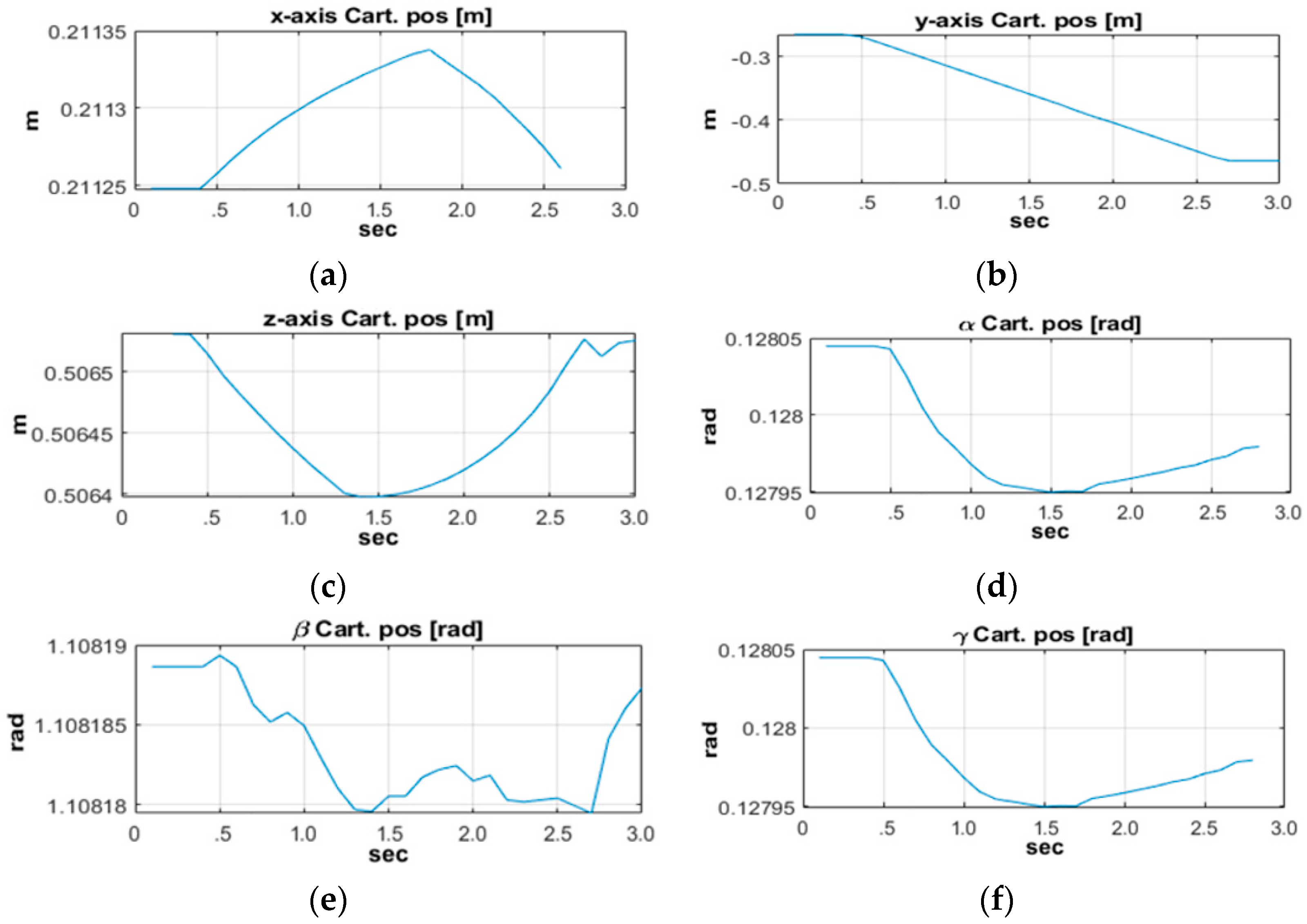
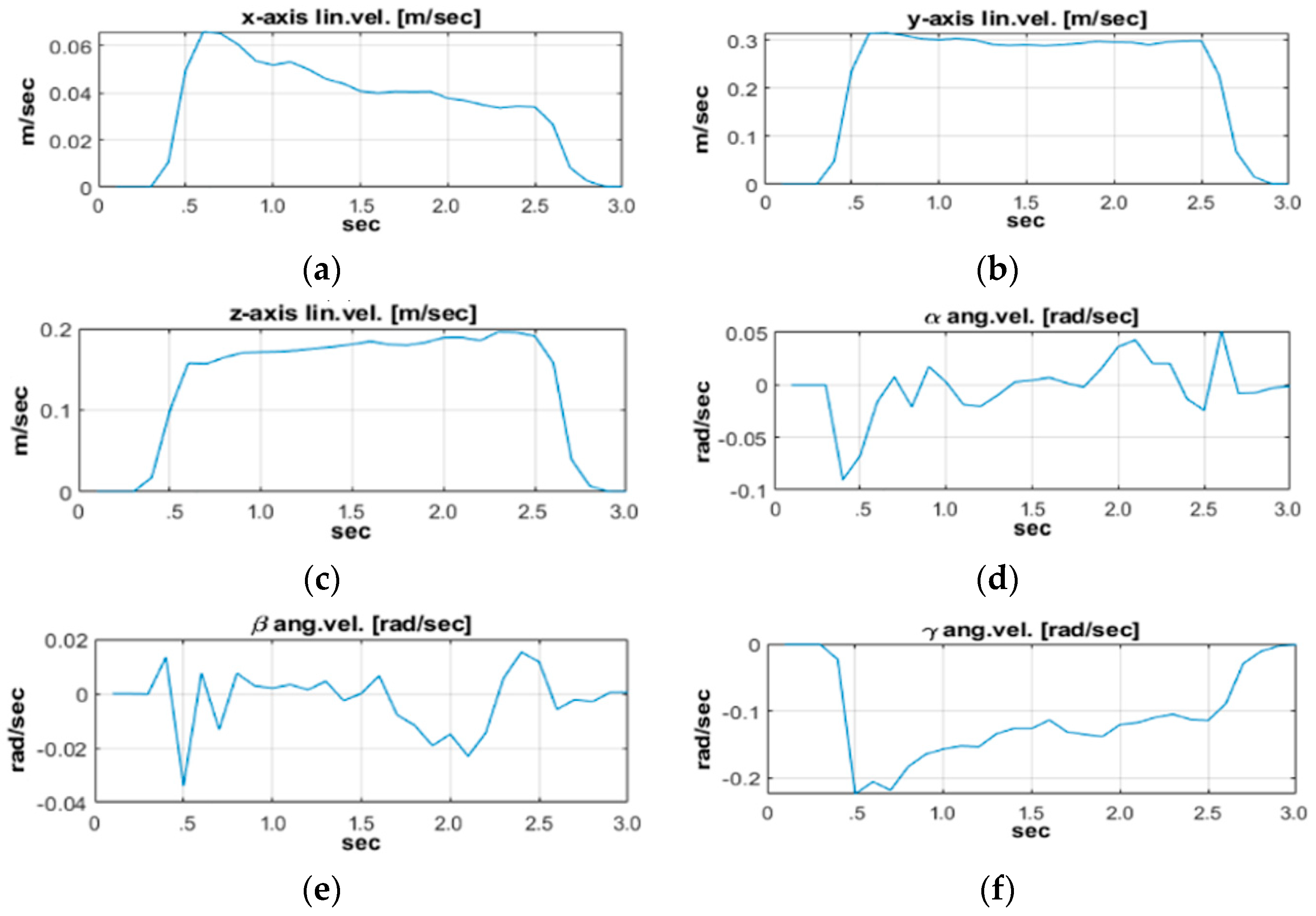
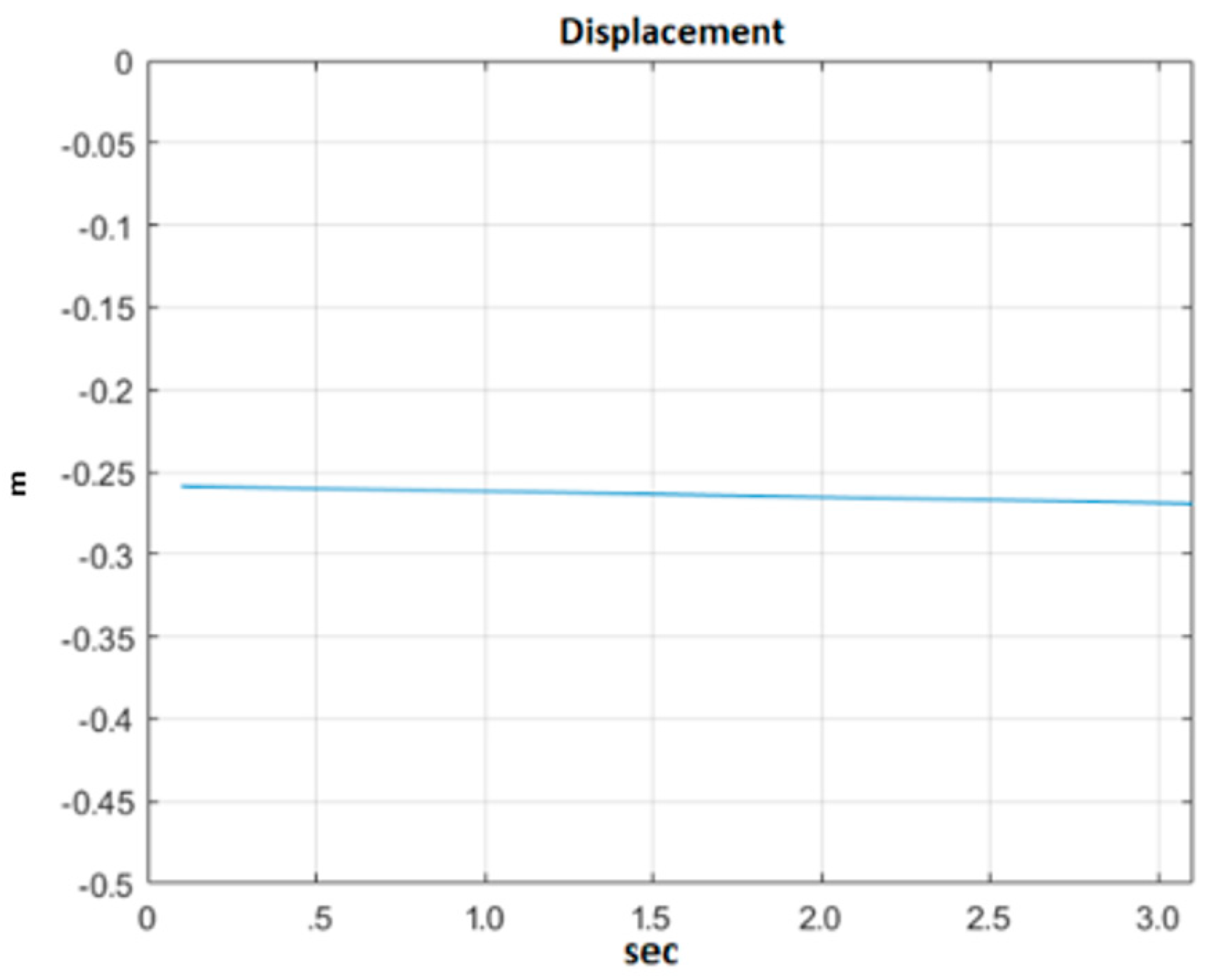
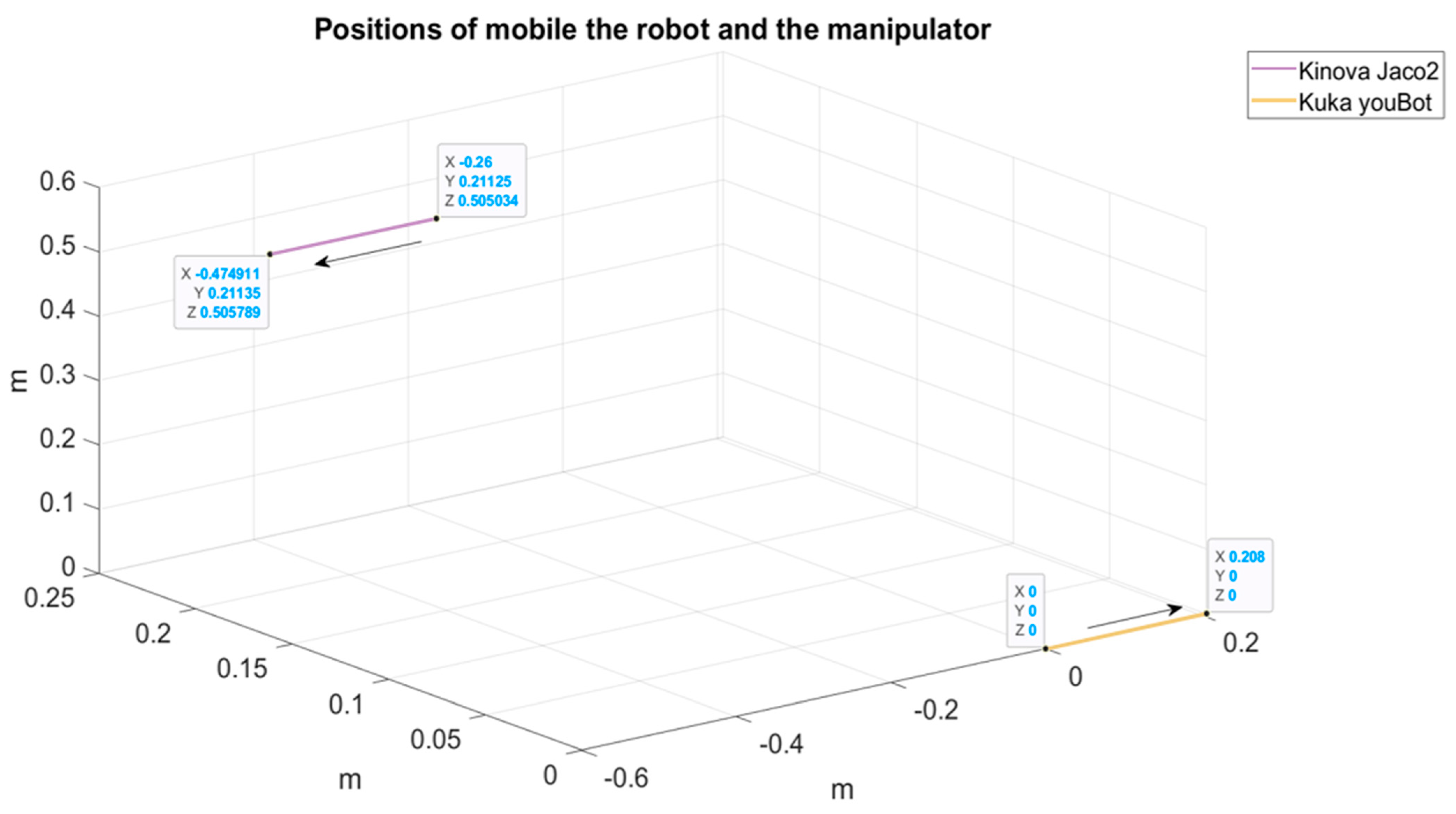
3. Experimental Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- ISO/TS 15066:2016; Robots and Robotic Devices—Collaborative Robots. International Organization for Standardization: Geneva, Switzerland, 2016. Available online: https://www.iso.org/standard/62996.html (accessed on 16 January 2024).
- ISO 10218-1:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 1: Robots. International Organization for Standardization: Geneva, Switzerland, 2011. Available online: https://www.iso.org/standard/51330.html (accessed on 16 January 2024).
- ISO 10218-2:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. International Organization for Standardization: Geneva, Switzerland, 2011. Available online: https://www.iso.org/standard/41571.html (accessed on 16 January 2024).
- Neto, P.; Pires, J.N.; Moreira, A.P. Accelerometer-based control of an industrial robotic arm. In Proceedings of the Robot and Human Interactive Communication RO-MAN 2009, Toyama, Japan, 27 September–2 October 2009. [Google Scholar] [CrossRef]
- Ben Abdallah, I.; Bouteraa, Y. Gesture Control of 3DOF Robotic Arm Teleoperated by Kinect Sensor. In Proceedings of the 19th International Conference on Sciences and Techniques of Automatic Control & Computer Engineering (STA), Sousse, Tunisia, 24–26 March 2019. [Google Scholar] [CrossRef]
- Ahmed, S.A.; Ramadan, M.M.; Fathy, E. Motion Control of Robot by Using Kinect Sensor. Res. J. Appl. Sci. Eng. Technol. 2014, 8, 1384–1388. [Google Scholar] [CrossRef]
- Waldherr, S.; Romero, R.; Thrun, S.A. Gesture Based Interface for Human-Robot Interaction. Auton. Robot. 2000, 9, 151–173. [Google Scholar] [CrossRef]
- Tchon, K.; Jakubiak, J.; Muszynski, R. Mobile manipulators with implicit aboard kinematics. In Proceedings of the 11th International Conference on Advanced Robotics ICAR 2003, Coimbra, Portugal, 30 June–3 July 2003. [Google Scholar] [CrossRef]
- Bischoff, R.; Huggenberger, U.; Prassler, E. KUKA youBot—A mobile manipulator for research and education. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef]
- Natarajan, S.; Kasperski, S.; Eich, M. An Autonomous Mobile Manipulator for Collecting Sample Containers. In Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space, Montreal, Canada, 17-19 June 2014. [Google Scholar]
- Pepe, A.; Chiaravalli, D.; Melchiorri, C. A Hybrid Teleoperation Control Scheme for a Single-Arm Mobile Manipulator with Omnidirectional Wheels. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar] [CrossRef]
- Adiwahono, A.H.; Chua, Y.; Tee, K.P.; Liu, B. Automated door opening scheme for non-holonomic mobile manipulator. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Republic of Korea, 20–23 October 2013. [Google Scholar] [CrossRef]
- Zimmermann, S.; Poranne, R.; Coros, S. Go Fetch!—Dynamic Grasps using Boston Dynamics Spot with External Robotic Arm. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Yun, X. Coordinating locomotion and manipulation of a mobile manipulator. IEEE Trans. Autom. Contr. 1994, 39, 1326–1332. [Google Scholar] [CrossRef]
- Seraji, H. A unified approach to motion control of mobile manipulators. Int. J. Rob. Res. 1998, 17, 107–118. [Google Scholar] [CrossRef]
- Khatib, O.; Yokoi, K.; Chang, K.; Casai, A. Robots in human environments: Basic autonomous capabilities. Int. J. Rob. Res. 1999, 18, 684–696. [Google Scholar] [CrossRef]
- Yamamoto, Y.; Yun, X. Unified analysis of mobility and manipulability of mobile manipulators. In Proceedings of the Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; pp. 1200–1206. [Google Scholar] [CrossRef]
- Tchon, K.; Jakubiak, J.; Muszynski, R. Kinematics of mobile manipulators: A control theoretic perspective. Arch. Control Sci. 2001, 11, 79–105. [Google Scholar]
- Sharma, S.; Kraetzschmar, G.K.; Scheurer, C.; Bischoff, R. Unified Closed Form Inverse Kinematics for the KUKA youBot. In Proceedings of the ROBOTIK 2012, 7th German Conference on Robotics, Munich, Germany, 21–22 May 2012; ISBN 978-3-8007-3418-4. [Google Scholar]
- Liu, Y.; Li, H.; Ding, L.; Liu, L.; Liu, T.; Wang, J.; Gao, H. An Omnidirectional Mobile Operating Robot Based on Mecanum Wheel. In Proceedings of the 2017 2nd International Conference on Advanced Robotics and Mechatronics (ICARM), Hefei and Tai’an, China, 27–31 August 2017. [Google Scholar] [CrossRef]
- Li, X.; Luo, L.Z.; Zhao, H.; Ge, D.S.; Ding, H. Inverse Kinematics Solution Based on Redundancy Modeling and Desired Behaviors Optimization for Dual Mobile Manipulators. J. Intell. Robot. Syst. 2023, 108, 37. [Google Scholar] [CrossRef]
- Zhang, X.F.; Li, G.F.; Xiao, F.; Jiang, D.; Tao, B.; Kong, J.Y.; Jiang, G.Z.; Liu, Y. An inverse kinematics framework of mobile manipulator based on unique domain constraint. Mech. Mach. Theory 2023, 183, 105273. [Google Scholar] [CrossRef]
- Colucci, G.; Botta, A.; Tagliavini, L.; Cavallone, P.; Baglieri, L.; Quaglia, G. Kinematic Modeling and Motion Planning of the Mobile Manipulator Agri.Q for Precision Agriculture. Machines 2022, 5, 321. [Google Scholar] [CrossRef]
- Huang, Y.; Li, D.L.; Dong, K.J.; Zhang, W.C.; Gao, X.M. Inverse Kinematics Analysis and Mechatronics Design of Mobile Parallel Manipulator for Assisted Assembly. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (IEEE ICMA 2022), Guilin, China, 7–10 August 2022. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; The MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Ahmed, S.A.; Shakev, N.G.; Topalov, A.V.; Popov, V.L. Model-Free Detection and Following of Moving Objects by an Omnidirectional Mobile Robot using 2D Range Data. IFAC-PapersOnLine 2018, 51, 226–231. [Google Scholar] [CrossRef]
- User Guide KINOVA® GEN2 Ultra Lightweight Robot. Available online: https://artifactory.kinovaapps.com/ui/api/v1/download?repoKey=generic-documentation-public&path=Documentation%252FGen2%252FTechnical%2520documentation%252FUser%2520Guide%252FUG-009_KINOVA_Gen2_Ultra_lightweight_robot_User_guide_EN_R03.pdf (accessed on 21 October 2023).
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 4th ed.; Pearson Prentice Hall: London, UK, 2017. [Google Scholar]
- Lewis, W.L.; Dawson, D.M.; Abdallag, C.T. Robot Manipulator Control Theory and Practice, 2nd ed.; Publisher Marcel Dekker, Inc.: New York, NY, USA, 2004. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| β [deg] | |||||
|---|---|---|---|---|---|
| Wheel (1) | 32.5 | 57.5 | −45 | 0.279 | 0.05 |
| Wheel (2) | 147.5 | −57.5 | 45 | 0.279 | 0.05 |
| Wheel (3) | −147.5 | −122.5 | −45 | 0.279 | 0.05 |
| Wheel (4) | −32.5 | 122.5 | 45 | 0.279 | 0.05 |
| Parameters | Descriptions | Length (m) |
|---|---|---|
| Base to shoulder | 0.2755 | |
| Upper Length (shoulder to elbow) | 0.41 | |
| Forearm length (elbow to wrist) | 0.2073 | |
| First wrist length | 0.1038 | |
| Second wrist length | 0.1038 | |
| Wrist to center of the hand | 0.16 | |
| Joint 3–4 lateral offset | 0.0133 |
| Characteristics | Values |
|---|---|
| Total weight | 4.4 kg |
| Reach | 98.4 cm |
| Maximum payload | 2.6 kg (mid-range)/2.2 kg (full-range) |
| Materials | carbon fiber/aluminum |
| Maximum linear arm speed | 20 cm/sec |
| Power supply voltage | 18–29 VDC |
| Average power | 25 W (15 W standby) |
| Peak power | 100 W |
| Communication protocol | RS485 |
| Communication cables | 20 pins flat flex cable |
| Water resistance | IPX2 |
| Operating temperature | −10 to 40 |
| Title | |||
|---|---|---|---|
| Nominal torque (Nm) | 12 | 9.2 | 3.6 |
| Peak torque (Nm) | 30.5 | 18 | 6.8 |
| No load speed (rpm) | 12.2 | 9.8 | 20.3 |
| Nominal speed (rpm) | 9.4 | 7 | 15 |
| Weight (g) | 570 | 587 | 357 |
| Reduction ratio | 136 | 160 | 110 |
| Angular ranges, software limited (turns) | ±27.7 | ||
| Communication protocol | RS485 | ||
| 1 | 0 | |||
| 2 | 0 | |||
| 3 | 0 | |||
| 4 | 0 | |||
| 5 | 0 | 0 | ||
| 6 | 0 |
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | ||||
| 4 | 0 | |||
| 5 | 0 | 0 | ||
| 6 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Popov, V.; Topalov, A.V.; Stoyanov, T.; Ahmed-Shieva, S. Kinematic Modeling with Experimental Validation of a KUKA®–Kinova® Holonomic Mobile Manipulator. Electronics 2024, 13, 1534. https://doi.org/10.3390/electronics13081534
Popov V, Topalov AV, Stoyanov T, Ahmed-Shieva S. Kinematic Modeling with Experimental Validation of a KUKA®–Kinova® Holonomic Mobile Manipulator. Electronics. 2024; 13(8):1534. https://doi.org/10.3390/electronics13081534
Chicago/Turabian StylePopov, Vasil, Andon V. Topalov, Tihomir Stoyanov, and Sevil Ahmed-Shieva. 2024. "Kinematic Modeling with Experimental Validation of a KUKA®–Kinova® Holonomic Mobile Manipulator" Electronics 13, no. 8: 1534. https://doi.org/10.3390/electronics13081534
APA StylePopov, V., Topalov, A. V., Stoyanov, T., & Ahmed-Shieva, S. (2024). Kinematic Modeling with Experimental Validation of a KUKA®–Kinova® Holonomic Mobile Manipulator. Electronics, 13(8), 1534. https://doi.org/10.3390/electronics13081534