Abstract
With the rapid advancement of intelligent unmanned aerial vehicle (UAV) technology, UAV swarm technology is being increasingly applied with autonomous control, intelligent collaboration, and flexible deployment. It exhibits tremendous potential in emergency rescue, environmental monitoring, wireless communication and other areas. UAV swarms require stable communication links to perform tasks such as formation control, route planning, and data acquisition. To improve the high-speed, secure communication capability and environmental adaptability of UAV swarms, this paper proposes the use of optical communication technology, which offers advantages such as rapid deployment, resistance to electromagnetic interference, and strong confidentiality, to help maintain communication links under special conditions such as emergency scenarios, strong electromagnetic interference, and communication impedance. UAVs are characterized by their high maneuverability and low payload capacity, making it difficult for traditional laser communication to maintain the communication link under such dynamic conditions. This paper proposes an optical communication scheme with a specific divergence angle, ensuring transmission distance and covering a certain communication range. The research results demonstrate that the proposed optical communication platform can maintain a transmission rate of 100 Mbps within a specified angle. We propose that the future direction of UAV optical communication development lies in more efficient transmission and reception technologies, smarter coding and modulation techniques, and enhanced environmental adaptability. Finally, we constructed two scenarios for UAV swarms, including air-to-ground and air-to-air, and assessed the application potential of swarm optical communication technologies in these two scenarios.
1. Introduction
With the continuous development of UAV technology, UAV swarms have demonstrated tremendous potential in various fields as an advanced technology in the modern aviation sector [1]. A UAV swarm is composed of low-cost, small drone platforms, which feature high mobility, robustness, and strong resilience to damage [2]. The UAV swarm simulates the behavior of natural bee colonies using a large number of simple-function unmanned aerial vehicles. Through mechanisms such as information sharing, self-organizing formation, adaptive flight, intelligent decision-making, and collaborative cooperation, it achieves a high level of collective intelligence. This enables the drone swarm to accomplish a variety of tasks [3].
Although UAV swarms have been widely adopted in various military and civilian applications such as environmental and natural disaster monitoring, border surveillance, emergency response, search and rescue, cargo delivery, and construction [4], their collective task capability heavily relies on the information exchange between UAVs. During mission execution, UAV swarms depend on reliable communication links to accomplish formation control, route planning, task allocation, and collaborative planning, which ensure information sharing and coordinated operations among large-scale UAVs.
Under current technological conditions, UAV swarms still rely heavily on real-time communication. In practical missions, they require real-time communication with the control platform via telemetry links [5], and UAVs also rely on stable communication links to share information with each other. The existing communication methods for UAV swarms mainly include Wi-Fi, Zigbee, 5G, satellite communication, and optical communication. If the UAV is operating in an electromagnetically complex environment, such as a nuclear power plant, industrial area, urban setting, or a densely populated communication area, there are typically various electromagnetic radiation sources with significant differences in radiation intensity, dense signal distribution, and diverse signal forms. UAVs that use communication methods such as Wi-Fi, Zigbee, and 5G are vulnerable to electromagnetic interference, which may prevent collaborative command and information sharing, ultimately leading to mission failure. In emergency rescue scenarios such as earthquakes, floods, or chemical explosions, ground-based cellular network infrastructure is often damaged or disrupted, preventing reliable communication under harsh conditions [6]. As a result, UAV communication has gradually become an important solution for supporting ground communication networks in emergency response situations [7,8]. Traditional UAV communication relies on radio frequency (RF) communication, but due to limited bandwidth and susceptibility to electromagnetic interference, this approach is insufficient to meet the demands of modern UAV swarms performing missions.
For UAV intelligent cooperative missions in complex electromagnetic environments, this paper investigates the applications of drone swarms and conducts a comparative analysis of existing UAV communication methods. After evaluating optical communication performance, a certain divergence angle optical communication system is designed and proposed, with its feasibility for drone swarm implementation demonstrated through both theoretical and experimental validation.
This optical communication technology offers several advantages, including high speed, extensive bandwidth, robust anti-interference capabilities, and excellent confidentiality. This technology not only reduces the reliance on ground command and control centers, but also effectively addresses the limitations of traditional RF data links in terms of bandwidth, interference resistance, and secure transmission [9]. UAVs possess high mobility and scalability. When the cellular network is overloaded or fails, UAVs can serve as communication base stations, effectively supplementing traditional fixed networks and providing temporary communication services [10]. UAVs using optical communication technology have excellent mobility, low cost, rapid deployment, strong anti-jamming capability, superior security and concealment. They are not constrained by ground-based fixed infrastructure and can function as mobile relays, especially in emergency communications, where they can effectively complement the limitations of fixed satellite relays. As these advantages continue to emerge, UAVs using optical communication technology are poised to become a highly promising solution for building flexible aviation backbone communication networks [11].
The structure of this paper is as follows: Section 1 introduces the research background and the main contributions of this paper. Section 2 provides an overview of the civilian applications of UAV swarms in various countries, including the United States, Russia, and China. Section 3 analyzes the necessity and reliability of applying optical communication to UAVs by examining the existing communication methods, the technical characteristics of UAV optical communication, and the current technical specifications of these systems. Section 4 presents a UAV swarm optical communication architecture based on Vertical-Cavity Surface-Emitting Lasers (VCSELs) and large-area Avalanche Photodiodes (APDs). By introducing the system components and experimental results, the feasibility of the system for UAV communication is demonstrated. Section 5 introduces the key technologies of UAV optical communication, while Section 6 presents two optical communication system frameworks for UAVs: ground-to-air communication and air-to-air communication. Finally, the conclusion provides an outlook on the future of UAV optical communication technology and proposes directions for future research in this field.
2. Progress of UAV Swarm Application
The United States has made rapid progress in various fields of UAV swarm technology. The application of UAVs involves many industries, including logistics and transportation, agriculture, infrastructure inspection, environmental monitoring and emergency response. The Federal Emergency Management Agency (FEMA) has used UAVs to conduct ground searches, assess disaster areas, and provide emergency responses in multiple disasters. In the 2016 Louisiana flood, UAVs provided comprehensive loss data and topographic maps to assist decision-makers in developing effective evacuation strategies [12]. The National Oceanic and Atmospheric Administration (NOAA) has used Uncrewed Aircraft Systems (UASs) for various survey tasks. In May 2023, NOAA’s Southeast Fisheries Science Center (SEFSC) and the National Geodetic Survey’s Remote Sensing Division (RSD) used UAS to carry out multiple marine environmental monitoring and meteorological observation tasks [13].
In Russia, UAV swarm technology was primarily used in the military field initially, but its application in civilian fields has been gradually developed in recent years. According to a report by the Russian Satellite News Agency on 17 September 2020, Russian Defense Minister Shoigu said that the army aviation and UAVs had participated in monitoring natural emergencies in eastern Russia, and had completed nearly 80 missions in total [14]. In order to deal with the frequent forest fires and floods in Siberia and the Far East, the Russian Ministry of Defense deployed military UAV rescue teams in Siberia in 2020 [15]. The military-equipped UAVs were used to monitor the local situation, detect dangerous situations in a timely manner, and implement rescue operations.
China has covered multiple industries in UAV swarm applications. In 2021, China launched a scientific research experiment of three-dimensional coordinated observation of sea, land and air by UAVs. The Pterodacty-l0 UAV, equipped with multiple meteorological payloads, established a three-dimensional observation network at high altitudes with surface buoys, balloon sounding systems, and ground-based vertical remote sensing observation equipment [16]. It validated multiple meteorological payloads and UAV platforms and explored the establishment of a meteorological emergency observation system based on UAVs. This study lays the foundation for mobile observation of typhoons, floods, forest fires, and provides important support for ocean development, disaster prevention, and marine construction [17]. During the Coronavirus Disease 2019 (COVID-19) pandemic in 2020, 99 UAV companies with a total of 780 UAVs participated in epidemic prevention and control tasks, and UAVs accounted for up to 85% of the total number of aircraft [18].
Based on the development of UAV swarm technology in the aforementioned countries, the research and application of UAV swarm fully demonstrate the importance of UAV swarm in both the present and future. UAV swarm has a wide range of applications. Through the advantages of swarm synergy, it not only improves operational efficiency, but also reduces human costs. Moreover, it has a profound impact on environmental protection, emergency rescue, resource management and other fields. It is speculated that around 2050, UAVs are expected to hold a commercial share of no less than 30% in the international medical aid industry, contributing rapid and effective healthcare assistance to remote areas [19]. With the continuous development of technology, UAV swarms will play a greater role in more industries in the future, promoting the process of social intelligence and efficiency.
3. Requirements Analysis of UAV Swarm Optical Communication
UAVs generally need to form functional swarms through self-organizing networks according to different tasks. The UAV swarm nodes serve as communication relays: they exchange information to understand the local situation and transmit the collected information to the ground station or satellite. Based on the overall information, the ground station or satellite performs information fusion and situation prediction, and then issues operational commands to the swarm nodes, thereby effectively directing the swarms to execute tasks [20]. Due to the large number of nodes and the extensive scale of the UAV swarm, in order to achieve self-adaptive control and intelligent combat within the swarm, it is necessary to establish an internal mobile self-organizing network among UAVs. Through this network, swarms can transmit commands and share information via inter-swarm data links [5]. Therefore, a highly reliable communication link is crucial for UAVs.
3.1. Analysis of UAV Communication Methods
There are six main communication methods for UAVs, including ZigBee, Wi-Fi, LoRa, 5G, satellite communication and optical communication. Optical communication includes traditional laser communication and flood optical communication. Flood optical communication refers to wireless optical communication technology with a certain divergence angle. Their characteristics are shown in Table 1 below.

Table 1.
Comparison of six types of wireless communication.
As shown in the table, among the six wireless communication methods for UAVs, optical communication technology and LoRa technology have strong resistance to interference, but their transmission rate is too low to meet the data transmission requirements of UAVs. Optical communication technology can maintain the stability of communication links in the presence of electromagnetic interference and strong adversarial environments.
The environment of a UAV swarm mission is variable and complex; electromagnetic interference has the greatest impact on UAV swarm communication links. Therefore, optical communication, which offers strong confidentiality and resistance to electromagnetic interference, should be employed by UAVs to ensure the stability of the communication links. Although optical communication technology has significant advantages for UAV swarm applications, its performance remains influenced by various factors [29], especially atmospheric attenuation and weather conditions. Among these, fog has the greatest impact on Free Space Optical Communication (FSO) system performance because the size of fog particles is similar to that of light waves [30].
3.2. Analysis of UAV Optical Communication Characteristics
A UAV network is commonly referred to as a Flying Ad Hoc Network (FANET), which is a special Mobile Ad Hoc Network (MANET) [31]. Compared with traditional MANETs and wireless sensor networks, FANETs have the characteristics of high speed and rapid topology changes. The main factors that affect UAV communications are as follows:
- 1.
- Node high-speed mobility and network topology changes
The flight speed range of drones is extensive, and the high mobility of UAVs can significantly improve time efficiency. The classifications in [32] factor airspeed into the categorizations of UAVs: group 1 (small UAVs) has airspeed up to 100 knots, groups 2 and 3 (medium to large) have airspeeds up to 250 knots, while groups 4 and 5 can operate at any airspeed. UAV network nodes can not only move in 3D space, but also pre-plan the trajectories of UAV network nodes based on mission requirements and dynamically adjust to the network environment [33]. The rapid movement of UAV nodes results in dynamic changes in network topology, making it challenging to ensure real-time information transmission between nodes, potentially leading to inter-node collisions or node loss in UAV.
- 2.
- Complex mission environments
UAV swarms not only have significant impacts on agriculture, industry, and urban management, but are also widely used in emergency rescue [34]. UAVs are used for a diverse range of missions and operate in complex environments, where environmental conditions can have a direct impact on communication quality, transmission rates, and system reliability. The mission environment includes:
- (1)
- Topographic factors: in mountainous areas or forests, obstacles such as mountains, trees, and buildings can significantly affect signal propagation, leading to signal attenuation and multipath effects.
- (2)
- Climate and weather factors: Rain, snow, hail, haze, and dust storms can cause signal attenuation, particularly for signals in the microwave bands, which attenuate faster in rainy environments. Strong winds and air currents can lead to instability in drone flight, which, in turn, affects the alignment of the communication antennas and the quality of the signal.
- (3)
- Electromagnetic environment: In high-density electromagnetic environments, such as base stations, radar, and radio transmitters, multiple radio frequency links can interfere with each other, hindering the establishment of stable airborne RF communications [35]. The overlap of radio frequency bands may lead to a decline in communication link quality or complete failure.
Based on the above characteristics of UAV swarm communication, optical communication technology with a certain divergence angle offers the following advantages in UAV applications:
- 1.
- Compared to traditional radio frequency communication, optical communication technology offers the following advantages in UAV applications:
- (1)
- Larger bandwidth and higher transmission rate
Optical communication utilizes the spectrum of optical bands (particularly the infrared and visible light bands), offering a bandwidth significantly wider than that of traditional RF bands. Due to the limited RF spectrum resources and the increasing connectivity of data-intensive applications, different communication systems must coexist within the same frequency band. However, the limited bandwidth struggles to meet the ever-growing spectrum demands, leading to congestion and competition for RF spectrum resources, which, in, turn affects communication speed and quality [36]. Compared to RF links, optical communication offers a larger modulation bandwidth, enabling higher data rates, and it does not require spectrum licensing [37]. Optical communication can achieve bandwidths of Mbps or even Gbps, and with the addition of modulation techniques, it can significantly enhance the transmission rate of wireless optical communication [38]. Therefore, optical communication technology can provide extremely high data transfer speeds in theory, making it particularly suitable for applications with high bandwidth requirements, such as high-definition video transmission and big data transfers. When performing tasks, UAVs often need to collect large volumes of video data. In tasks such as inspection, surveillance, and mapping, UAVs are typically equipped with high-definition cameras with resolutions of 4K or even 8K. These cameras capture high-definition videos from the air and transmit the videos data in real-time to the server. These application requirements demand a communication network capable of providing real-time transmission speeds of over 100 Mbps for the terminal devices [39]. In 2019, a research team from the University of Southern California demonstrated a dual-channel 40 Gbit/s high-speed optical link using a retro-reflector mounted on a UAV. This system achieved a communication distance of 100 m while maintaining a bit error rate (BER) within acceptable limits [40]. In 2021, Changchun University of Science and Technology developed a laser communication system composed of a master optical terminal on an airship and a ground-based slave optical terminal. The system achieved a communication rate of 2.5 Gbit/s, a transmission distance of 2 km, and a BER below 1 × 10−9 [41]. Therefore, optical communication systems are better equipped to ensure the completion of data transmission tasks.
- (2)
- Strong anti-interference capability
RF signals use electromagnetic waves for transmission, with wavelengths typically falling within the radio frequency spectrum, such as Frequency Modulation (FM), Amplitude Modulation (AM), and microwaves. Electromagnetic waves are susceptible to electromagnetic interference (EMI), particularly in complex electromagnetic environments, such as industrial equipment, household appliances, and high-power electronic devices. As optical waves fall outside the frequency range of electromagnetic waves, they do not overlap with the traditional radio frequency (300 kHz to 300 GHz) communication spectrum, and are therefore not susceptible to electromagnetic interference [42]. Optical communication uses light waves (typically visible light, infrared, or ultraviolet) to transmit signals, operating stably within a specific frequency bandwidth, and thereby avoiding electromagnetic interference caused by spectrum sharing in RF communication. In complex electromagnetic environments, such as nuclear power plants, industrial areas, and communication-dense regions, optical communication technology ensures reliable and stable communication.
- (3)
- High security and confidentiality
Optical signals have excellent directional properties, making them difficult to detect during transmission, which ensures a high level of confidentiality and provides strong protection for information security [43]. Optical signals have strong directional radiation, making them difficult to leak into the surrounding environment or be captured by unintended receivers. Additionally, optical signals typically cannot penetrate physical obstacles, limiting their transmission range and the possibility of leakage. In contrast, RF communication signals usually spread widely, and attackers can intercept the signal from any direction without needing precise alignment.
- (4)
- Scalability and flexibility
Optical communication transmits signals through free space and does not rely on physical cables or fiber-optic connections. The layout of equipment and access points is flexible, allowing for quick increases or reductions in communication links based on demand. A UAV swarm optical communication network consists of multiple UAVs that can work together to achieve wider coverage and higher communication capacity [44]. Moreover, optical communication equipment is compact, lightweight, and energy-efficient, enabling easy implementation of different topological structures such as point-to-point and point-to-multipoint. Additionally, it supports rapid expansion and dynamic adjustment, without the need for extensive communication infrastructure, allowing for low-cost deployment [45].
- 2.
- Compared with laser communications, optical communication systems have the following advantages in UAV applications:
- (1)
- Adaption to highly dynamic environments
UAVs have high mobility and dynamic network topology changes; the optical communication system employs light sources with a certain angle for data transmission, enabling signal coverage over a specific area. Due to the extremely narrow beam of laser communication, it is prone to pointing errors caused by the misalignment between the transmitter and receiver, and the vibrations during UAV flight [46]. These pointing errors cannot compensate for the UAV’s flight jitter and attitude changes, which may lead to signal fading and affect overall system performance.
- (2)
- Greater environmental adaptability
Optical communication can operate stably in most common environments, especially in open spaces, making it suitable for short-range communication between large UAV fleets or multiple UAVs. The performance of laser communications is often limited by weather conditions such as haze, rain and snow. In particular, under adverse weather conditions, the quality of laser communication can significantly degrade. To maintain efficient transmission, laser communication systems typically require more stable weather and environmental conditions.
- (3)
- Small size, light weight, and low power consumption
Due to the limited payload capacity and battery of UAVs, the equipment they carry is required to be compact, lightweight, and energy-efficient. Optical communication equipment offers advantages such as high integration, compact size, low power consumption, and easy installation. In the event of emergencies or when temporary communication support is needed, optical communication systems can be quickly configured and put into operation. In contrast, while laser communication is more efficient, it requires high-power devices like lasers, resulting in higher energy consumption, which impacts the drone’s endurance. Therefore, optical communication is more suitable for installation on drones.
In summary, compared to RF communication and laser communication, optical communication, which is based on line-of-sight links, offers advantages such as high data rates, resistance to electromagnetic interference, and low power consumption, making it more suitable for highly flexible UAV swarm systems. Optical communication technology can establish a communication link in a short time without relying on existing infrastructure, enabling on-demand rapid deployment and reducing the difficulty of establishing line-of-sight connections. By using optical communication as a supplementary communication method for UAV swarms, it enhances their resistance to interference, improves survivability, and ensures that drones can maintain stable communication links, even in environments with strong electromagnetic interference and communication denial.
3.3. Technical Requirements for UAV Optical Communication
There is a wide variety of UAVs, covering applications ranging from consumer-grade to industrial-grade. The main parameters of UAVs include endurance, payload capacity, and external load power. Consumer-grade drones are typically used for light tasks such as entertainment, photography, and video recording. They generally have shorter flight times and lower payload capacities. Commercial/industrial-grade UAVs are suitable for missions such as agricultural monitoring, construction inspection, logistics distribution, and exploration, with longer flight times and higher payload capacities. Some models also support external loads, such as efficient sensors, spraying systems, or payload boxes. Military/high-end professional drones are specifically designed for military reconnaissance, intelligence gathering, and tactical support, offering extremely high flight times and payload capacities, and they can support high-power external devices such as radar and electronic warfare equipment. The specific details of commonly used UAVs are as shown in Table 2 below.
Table 2.
Typical parameters for UAVs.
The external payload weight of consumer-grade UAVs is calculated through third-party accessories, and the aforementioned consumer-grade UAVs are not designed with dedicated external power interfaces for payloads.
Based on the situation of UAVs mentioned above, optical communication equipment generally needs to be installed on industrial UAVs. Based on the endurance and payload capacity of current industrial class UAVs, the weight of optical communication equipment needs to be in the kilogram range, and have a power of less than 200 W.
According to the “White Paper on 5G Communication Technology-Based Three-Dimensional Coverage Networks for UAVs” (as specified in Table 3), an analysis of UAV network requirements across various industries indicates that communication requirements for drones vary significantly depending on their tasks. For instance, logistics and agricultural spraying tasks typically require lower communication rates, around 200–300 kbps, whereas video transmission and geospatial mapping demand significantly higher rates, usually ranging from 25 to 100 Mbps [54]. Current conventional UAV applications generally demonstrate bandwidth requirements constrained to 100 Mbps. In contrast, existing optical communication technology has achieved transmission rates at the Gbps level with low latency characteristics, demonstrating the potential to support expanded operational scenarios and diversified application fields.
Table 3.
Communication indicators of unmanned aerial vehicles UAVs [54].
In summary, the optical communication equipment installed on UAVs needs to be considered comprehensively in terms of the UAV’s payload capacity, payload power, and the UAV’s demand for communication rate.
In terms of payload weight, a general laser communication system needs to be equipped with high-precision automatic tracking platform (ATP) equipment. For short-distance communication, the weight of the ATP is typically between 4 and 10 kg; for small satellite communication, the ATP weighs approximately 10–30 kg, which makes it unsuitable for installation on common industrial drones. Ref. [55] proposes a high-speed FSO system that integrates the ATP system into a compact configuration. Each FSO device features an overall dimension of 45 cm × 40 cm × 35 cm, weighs 9.5 kg, and consumes approximately 10 W of power. Ref. [56] provides a coaxial transceiver system; and after simplification and improvement, the total weight of the ATP prototype is reduced to less than 8 kg. On the other hand, the optical communication system typically consists of a transmitter and a receiver. The conventional transmitter includes components such as the light source, modulation circuit, and driver circuit, while the receiver consists of a photodetector, amplification circuit, and demodulation circuit. Without additional peripherals, the overall weight of the system is generally under 1 kg, which meets the payload requirements of commonly used industrial UAVs.
The power consumption of optical communication is generally related to the communication speed and distance, and mainly depends on the following factors:
- (1)
- Optical components, including light emitter and light receiver. Light sources and photodetectors are the main energy sources of these devices.
- (2)
- Signal processing modules, including modem, codec, signal processing chip and others. They are also key components for power consumption.
- (3)
- Modulation methods: complex modulation methods such as Quadrature Amplitude Modulation (QAM), Orthogonal Frequency Division Multiplexing (OFDM). They may increase power consumption as they require more computing and processing capabilities.
The power consumption of optical communication ranges from several hundred milliwatts (mW) to several tens of watts (W), depending on the specific application requirements and system design. Ref. [57] proposes a laser modulator with a maximum modulation frequency of 1238 MHz and an output power greater than 1 W. In Ref. [58], single-mode operation with 50-W-class output power has been experimentally realized under continuous-wave (CW) conditions.
In terms of speed, significant progress has been made in optical communication technology, especially with the support of advanced modulation techniques. The invention of semiconductor-based light sources has made it possible to achieve high transmission bandwidth to support Gbps data rates [59]. Current commercial optical communication systems can achieve data rates ranging from approximately 100 Mbps to 1 Gbps. As technology advances, communication speeds will continue to increase. Ref. [60] employs coherent beam combining (CBC) technology based on optical phased arrays (OPAs) at the transmitter for adaptive compensation of atmospheric turbulence. This method successfully established a CBC-assisted FSO link, achieving data transmission rates of 64 Gbit/s per channel and 100 Gbit/s per polarization, with availability rates of 96% and 77%. In an experimental setup, the data rate of optical communication can reach 3.2 Tbps by using a Diffraction-Free Beam and Microcomb [61].
The working distance of optical communication is influenced by various factors, primarily including environmental factors and the design of the equipment’s optical system. Typical communication distances are as follows:
- (1)
- Indoor environment: In a clear, unobstructed indoor environment, the transmission distance of an optical communication system can usually reach tens to hundreds of meters. Ref. [62] investigated the short-range free-space transmission characteristics of optical orbital angular momentum (OAM) beams. In the experimental setup, a digital micromirror device (DMD) was used to generate OAM beams, with a transmission distance ranging from 0 to 50 m in an indoor environment. Ref. [63] proposed an in-vehicle Multiple-Input Multiple-Output (MIMO) Visible Light Communication (VLC) system based on two commercial headlights and a self-designed PIN array, achieving a data rate of 3.08 Gbps over a 2 m indoor transmission link. Furthermore, when the transmission distance was extended to 100 m, the overall data rates during the day and night reached 336 Mbps and 362 Mbps, respectively.
- (2)
- Short-distance urban communication: In shorter urban communication scenarios, the maximum working distance of optical communication devices can usually reach about 10 km. Ref. [64] proposed a quasi-synchronous algorithm based on GPS-synchronized timing, and experimentally validated the synchronization and tracking algorithms over distances of 2 km and 7.9 km outdoors. The experimental results showed that the Charge-Coupled Device (CCD) received the complete signal. However, the transmission quality and speed may be affected by environmental factors such as atmosphere conditions and rainwater, making it impossible to achieve high-speed transmission.
- (3)
- Medium to long distance (over 10 km): Under ideal conditions, some high-performance optical communication devices can support a maximum communication distance of 10 km or more [60]. However, during long-distance transmission, the signal will be affected by atmospheric moisture, dust, and other factors, causing signal attenuation and limiting the actual communication distance.
The transmission performance indicators of optical communication are shown in Table 4.
Table 4.
Transmission performance indicators of optical communication.
UAVs are characterized by high maneuverability and low payload capacity; so, optical communication payloads are required to be compact, lightweight, and capable of supporting large-angle movement. In comparison with traditional wireless and laser communication systems, optical communication typically enables long-duration, stable transmission with lower power consumption while adapting to the motion characteristics of drones and ensuring the communication speeds required for task execution. At present, UAV optical communication technology is developing towards higher data rates, longer range and lower power consumption.
4. Communication Network Architecture of UAV Swarm Optical Communication Technology
4.1. Progress in Outdoor Optical Communication
FSO is a communication technology using light as the carrier and free space as the transmission medium [65]. Usually, optical communication technology does not rely on physical media like optical fibers or cables, but instead communicates through air or vacuum space. Optical communication holds great potential in scenarios such as Intelligent Transportation Systems (ITSs) and the Internet of Things (IoT) [66]. Therefore, many researchers are dedicated to improving the communication quality and speed of FSO systems. FSO systems can be classified into indoor and outdoor communication systems based on channel characteristics. The optical communication system based on UAV swarms belongs to outdoor communication systems. For outdoor FSO systems, Ref. [67] introduces a full-duplex FSO system deployed on an FPGA, achieving a data rate of 2.5 Gbps at a distance of 130 m. Ref. [68] proposes a real-time FSO system with 476 Mbps On–Off Keying (OOK) modulation, with a communication distance of up to 500 m.
However, to ensure higher transmission rates and longer communication distances, these systems require precise alignment between the transmitter and receiver, making them unsuitable for dynamic scenarios such as UAVs. Ref. [69] proposes a complete Vehicular Visible Light Communication (V-VLC) transmitter–receiver system that complies with the IEEE 802.11 standard [70]. The results show that the system supports outdoor communication over a distance of more than 75 m. Ref. [71] presents an FSO system based on visible light communication, which is capable of 1 Mbps data transmission over a distance of 60 m during the daytime. Although these communication systems can better adapt to dynamic scenarios, their transmission rates are not high enough to meet the demands for high-speed transmission. To adapt to the motion of UAVs and simultaneously meet their data transmission requirements, this paper proposes an FSO system based on Vertical-Cavity Surface-Emitting Lasers (VCSELs) and Avalanche Photodiodes (APDs), which can cover a certain communication range while ensuring the transmission rate.
4.2. System Composition and Performance Verification
The fundamental principle of optical communication lies in modulating optical signals, encoding information, and emitting it through a light source. Then, it is transmitted through free space or air, and finally received and decoded by an optical receiver (such as a photodiode). This communication mode has the characteristics of high speed, low delay, and strong anti-interference; so, it is widely used in short-range and high-speed wireless data transmission, such as indoor communication, Wi-Fi, and satellite communication.
The composition of general optical communication system is as shown in Figure 1.
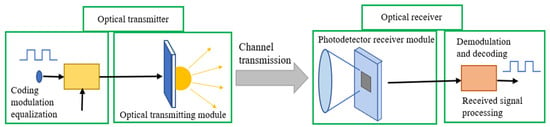
Figure 1.
Composition of general optical communication system.
The optical communication system includes a transmitter and receiver, as well as coding modulation and networking technology. To meet the communication requirements of UAVs, the following optical communication system architecture is proposed:
- (1)
- Optical communication transmitter based on VCSELs
Optical communication technology generally has several optional light sources, including white Light Emitting Diodes (LEDs), blue-green LEDs, near-infrared bands light sources, and ultraviolet bands light sources. There exists a wavelength range in the atmosphere where absorption and scattering of radiation are relatively low, and the radiation energy can penetrate the ground relatively easily. This is known as the “atmospheric window” [72]. To meet the requirements of UAV all-weather work and avoid the interference of solar background light, the near-infrared solar band has an absorption peak. Therefore, the near-infrared band can be selected as the optical communication band, which helps to mitigate the impact of solar light.
The slope efficiency of multi-junction Vertical VCSEL can reach 5.92 W/A @ 808 nm [73] and 6.27 W/A @ 1.3 μm [74], with a long service life, large power, small volume, light weight, and easy integration. At the same time, the operating wavelength of the VCSEL device ranges from 395 nm to 1550 nm [75,76], and the transmission rate is up to 106.25 Gbps [77]. VCSEL devices can be designed with divergence angles according to requirements to adapt to the jitter and movement characteristics of UAVs. The optical communication system can adopt the high-speed direct digital modulation technology of a near-infrared VCSEL to ensure the transmission distance and cover a certain communication range at the same time. With the laser driver circuit, the optical emission module can achieve a modulation rate of no less than 100 MHz.
However, because the central light intensity of the VCSEL is low, to ensure the uniformity of the energy distribution of the light source within the field of view, it is necessary to adjust the light at the emission end. Moreover, the working current of a high-power VCSEL is large; so, effective heat dissipation is required.
- (2)
- Optical communication receiver based on large-array APD
In long-distance optical communication, the transmission medium is mainly atmosphere or vacuum. Due to the scattering and absorption in the atmosphere, the signal strength will decay as the distance increases, which is one of the most difficult problems in the application of UAV. Thus, a high-power light source and a high-sensitivity detector are required.
To adapt to the characteristics of UAV maneuvering platforms, the primary consideration is to design optical transceiver antennas. Through optical system design, the optical communication transceiver is equipped with a wide communication angle, which helps reduce the impact of swarm attitude changes on optical axis alignment. Additionally, the optical design at the receiver includes the design of optical lenses and filters to optimize communication performance. The receiving gain and received signal amplitude can be improved by selecting a lens with a large aperture, strong focusing ability and high light transmittance. Moreover, by designing optical filters appropriately, narrowband optical signals can pass through with minimal loss, while broadband background light noise is effectively filtered out.
Large-array APD is suitable for high-speed detection and multi-echo detection because of its high sensitivity and fast response characteristics. Additionally, large-array APD, using optical beam shaping technology, has strong anti-interference capabilities, allowing it to maintain stable communication performance in complex environments. It integrates a low-noise broadband transimpedance amplifier, automatic gain control (AGC), limiter amplifier, boost converter, and temperature compensation circuitry, providing high gain while maintaining low noise levels. Compared to photomultiplier tubes, the APD offers higher quantum efficiency, a smaller size, less susceptibility to magnetic fields, and a wider dynamic range. Ref. [78] presents a fully integrated APD receiver in 0.35 μm Bipolar Complementary Metal-Oxide-Semiconductor (BiCMOS) technology with a large photodiode diameter of 800 μm, which is fully capable of Gbit operation. In Ref. [79], the authors report large-area 4H-SiC APDs with a high optical gain and low dark current. Ref. [80] presents a highly sensitive monolithic optical receiver, applicable for Optical Wireless Communication (OWC). The chip is designed in a 0.35 μm Complementary Metal–Oxide–Semiconductor (CMOS) process with a fully integrated 800 μm diameter APD. Measurements at 2.5, 5, and 10 Mb/s reveal high sensitivities of −50.4, −47.65, and −42.7 dBm, respectively, for a BER < 10−9 in dark conditions.
To further improve the detection sensitivity of the optical emission module, it is necessary to optimize the Transimpedance Amplifier (TIA) circuit. A higher gain bandwidth of the operational amplifier requires a lower feedback capacitance. Bandwidth can be increased by selecting appropriate capacitance parameters and optimizing the layout.
- (3)
- Modulation and demodulation
Due to the limitations of the light source modulation bandwidth and the detector’s response time, carrier modulation technology cannot be properly implemented. Modulation techniques of second order and above require a higher signal-to-noise ratio for reliable communication. In this scheme, the received optical signal energy is low and the channel noise is high, leading to severe signal quality degradation when higher-order modulation methods are used. OOK modulation is simple to implement and suitable for different frequency ranges and transmission distances. Due to its simple structure, OOK exhibits strong anti-interference capability in low-noise environments. According to the characteristics of the driving circuit in the optical communication system, the OOK modulation method is adopted to directly drive the modulation circuit. By introducing Reed–Solomon (RS) encoding/decoding, interleaving coding techniques, and efficient digital phase-locked loop technology, these measures further reduce the communication bit error rate, thereby effectively enhancing the communication distance. The direct detection system not only offers superior performance but also provides significant cost advantages, making the Intensity Modulation with Direct Detection (IM/DD) technology widely used in FSO systems [81].
The optical communication design scheme based on a VCSEL and large-array APD is shown in Figure 2.
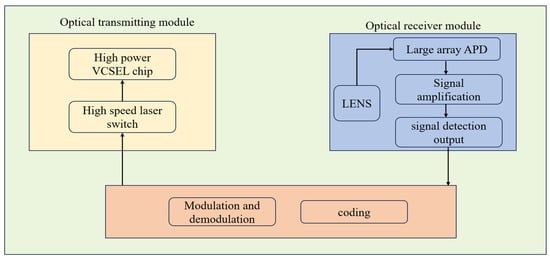
Figure 2.
Optical communication design scheme based on a VCSEL and large-array APD.
Based on the systems above, in the project in which we collaborated with Shanghai University, we built the experimental platform and conducted testing. In Ref. [82], the researchers set up a test platform under clear outdoor weather conditions using two Xilinx FPGA XC7Z020 and XC7K325T (Xilinx, Inc., San Jose, CA, USA) chips to handle data processing in the transmitter and receiver, respectively. The experiment completed tests with a communication distance of 140 m and a rate of 100 Mbps. It also achieved real-time communication over 250 m at a rate of 1 Mbps. Simultaneously, to verify the system’s adaptability to the dynamic environment of UAVs, misalignment tests were also conducted, where the maximum allowable misalignment angle between the transmitter and receiver at different communication distances was measured under a communication rate of 100 Mbps. As the height of the receiver unchanged and only the horizontal angle of the receiver adjusted, the test results showed that the farther the distance, the smaller the communication angle. The system is capable of communicating when the receiver deviates within ±26° at 10 m, −15° to +12° at 50 m, and −11° to +7° at 100 m [82].
For the optical communication system mentioned above, we constructed an optical communication network based on a UAV platform and conducted communication verification on this network. By observing the data frames of each UAV node, we were able to obtain information such as the type, quantity, and transmission time of the data frames, which allowed us to calculate the end-to-end delay, routing overhead, and packet delivery ratio [83]. The experimental results indicate that the optical communication system is capable of functioning effectively on highly dynamic UAV communication networks.
In conclusion, the optical communication design scheme based on a VCSEL and large-array APD can provide high-speed and anti-interference communication functions for UAV swarms. It can accommodate the vibration characteristics and high-speed mobility characteristics of UAV platforms, meeting UAV communication requirements and ensuring the smooth progress of collaborative missions.
5. Key Technologies and Development Trends of UAV Swarm Optical Communication
In UAV applications, optical communication technology enables high-speed data transmission between drones and ground stations or between drones, supporting tasks such as real-time video transmission, telemetry data exchange, and remote-control command transmission. This communication method features high bandwidth, low latency, and strong anti-interference capabilities, making it highly suitable for applications such as drones. UAV swarm optical communication is characterized by large-scale distribution, dynamic terminal movement, and long transmission delays, which pose significant challenges for its networking and application [84]. Key technologies in UAV optical communication mainly include the following aspects:
- 1.
- Efficient light source and light-receiving technology
Optical communication of a UAV depends on an efficient light source and an optical receiver to ensure the stability and reliability of signal transmission. The light source is the core component of the optical communication system, which affects the transmission efficiency, power consumption, bandwidth and other key indicators of the system. Optical receiving technology is another important part of the optical communication system, which affects the sensitivity of the received signal, anti-interference ability and the overall performance of the system.
A high power output and low power consumption are key factors in improving the performance of drone optical communication systems. With the development of VCSELs, diode laser and fiber laser technologies, the power, efficiency and reliability of laser sources are continuously improving. To adapt to the lightweight and compact design of UAVs, future light sources need to be further miniaturized and tightly integrated with the UAV communication system. Especially of note, VCSELs and micro light sources are widely used due to their many advantages, such as good mode quality, low threshold, high stability, long lifespan, high modulation rate, and high integration [85]. In certain low-power or closed range applications, LEDs (especially high-brightness and wide-spectrum LED) remain an important choice. LEDs offer the advantages of high luminous efficiency, good stability, long service life, and large luminous flux [86]. With the progress of LED technology, the use of LEDs at the transmitter will gradually increase, especially in short-range and low-cost applications, where LEDs can provide stable and efficient light sources. In the future, LED light sources are expected to incorporate more advanced spectral control technologies, thereby enhancing modulation performance and stability, reducing dispersion and distortion, and further improving data transmission quality.
When light propagates through atmospheric turbulence, it experiences varying degrees of intensity attenuation and beam spreading [87], which affects the signal quality at the receiving end. The receiver of UAV optical communication needs to have the characteristics of high sensitivity, low noise and fast response. At present, commonly used photodetectors include APD, photodiode (PIN) and photomultiplier tube (PMT), each with its own limitations. More efficient and low-cost silicon photon detectors may be used in the future, and they can not only provide high sensitivity, but also be compatible with traditional electronic circuits, reducing the overall cost of the system. The application of a single-photon detector (SPD) will become the focus in the application scenarios of ultra-long-distance or high-security requirements. SPDs have been widely used in optical and quantum communications due to their small size, ease of use and low cost [88]. SPDs can efficiently detect signals with extremely low intensities, thereby providing higher reliability for optical communication. Photon integration technology enables photodetectors to be integrated with other optical components on the same chip. This integration not only improves the integration of the system but also effectively reduces both the cost and power consumption of the system. At the same time, adaptive optical receiving technology is also one of the important development directions. Future UAV optical communication systems will increasingly rely on intelligent algorithms to dynamically adjust the optical receiving process. Adaptive filter and noise suppression technology will enable the optical receiver to adapt to the signal quality in different environments, thereby improving the stability and reliability of communication.
- 2.
- Intelligent coding and modulation technology
Modulation and coding technology plays an important role in UAV optical communication, which directly affects the performance, reliability, and efficiency of the communication system. The communication link is affected by the surrounding lighting environment, weather conditions, electromagnetic interference and other factors during UAV flight. Modulation and coding techniques can effectively improve the system’s anti-interference capability, ensuring that the communication system remains stable even in less-than-ideal environments.
The primary function of coding technology is to improve the anti-interference and error correction ability of the signal, thereby reducing the bit error rate. At present, widely used coding methods are error-correcting codes (including Turbo codes, Reed–Solomon codes, low-density parity check codes) and non-error correcting codes (including adaptive coding based on channel estimation, trellis coding), as well as advanced new coding technologies, such as space-time coding and polarization coding [89].
Modulation technology is used to modulate the encoded signal to adapt to the propagation characteristics of radio waves, thereby enhancing the transmission efficiency and reliability of the signal. Recent research on intelligently selecting modulation schemes to enhance the transmission performance of UAV optical communication links based on specific application scenarios and channel characteristics has gained widespread attention both domestically and internationally. Professor Ke Xizheng’s team at Xi’an University of Technology has conducted a comprehensive analysis and comparison of several modulation schemes, providing a theoretical basis for selecting the optimal modulation scheme to match different channel conditions [90].
With the advancement of UAV technology and the increasing demand for optical communication, future coding and modulation technologies are evolving towards intelligence and adaptability. Adaptive Modulation and Coding (AMC) can automatically select the most suitable modulation and coding schemes based on changes in channel conditions [91]. As environmental conditions change, optical communication systems can dynamically adjust modulation schemes and coding rates to optimize communication efficiency and reliability. To improve spectral efficiency, higher-order modulation techniques and hybrid modulation schemes are also the future direction of modulation technology development.
- 3.
- Anti-atmospheric interference and adaptive technology
Optical communication technology relies on the propagation of optical signals. The main disadvantage of optical communication systems is their vulnerability to atmospheric conditions. Different weather conditions and atmospheric turbulence can lead to the degradation of system performance [92]. To ensure the reliability of the communication link in complex weather conditions, adaptive protocols can automatically switch to alternative communication methods, such as short-range radio communication, low-power Bluetooth, or 5G-based communication networks, when the optical communication link is disrupted or unstable due to adverse weather. By monitoring atmospheric conditions and signal quality in real time, applying adaptive technologies to wireless optical communication systems can enhance the robustness of the system [93]. In addition, multi-mode communication systems, such as combining optical communication with RF communication, have been proposed as a flexible solution, which can dynamically switch communication modes in different meteorological environments and mitigate the risk of communication outages due to varying weather conditions.
With the support of environmental sensing, UAV swarms are capable of dynamically adjusting their flight trajectories and communication methods during flight through real-time analysis of atmospheric data, such as temperature, humidity, and wind speed. With the development of edge computing, some low-latency decision-making and processing can be carried out on the UAV side, greatly reducing the dependence on remote cloud servers. In recent years, numerous studies have been conducted on UAV-assisted MEC networks [94]. This enables the UAV system to respond quickly in the face of dynamic weather conditions.
UAV swarm optical communication technology is an interdisciplinary subject involving many fields, including the challenges of communication technology, sensor technology, control theory and other related fields. With the continuous progress of technology, the application of optical communication in UAV swarms will be increasingly widespread, especially in application scenarios requiring high speed, low delay, and large bandwidth. Future research and development efforts will focus on overcoming the communication challenges in dynamic environments, improving the stability and security of optical communication, and achieving the integrated application of a variety of communication technologies.
6. Application of UAV Optical Communication Technology System
The UAV communication network based on FSO, as an important component of the integrated air–space–ground network, plays a crucial role in bridging the upper and lower layers. This communication network is compatible with space-based platforms and connects to ground communication systems, effectively improving the transmission capability of space information networks [95]. Depending on the types of sources and destinations, the communication network can be classified into UAV air-to-ground (A2G) communication and UAV air-to-air (A2A) communication networks. The construction of an integrated space–air–ground optical wireless network has become a key focus of current research [96]. The A2G and A2A communication links of the UAV are shown in Figure 3.
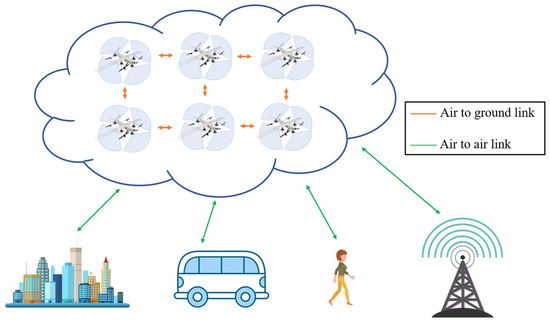
Figure 3.
UAV A2G and A2A communication links.
6.1. UAV A2G Communication
UAV A2G communication refers to the communication link established between a UAV and Ground Control Station (GCS) or ground users. This communication method is crucial for ensuring the real-time, safety, and effectiveness of UAV missions.
A2G communication is generally responsible for transmitting the intelligence information collected by UAVs back to the ground control station, such as images, videos, surveying and mapping data. It also involves sending control instructions from the Ground Control Station to the UAV, such as flight path, speed, altitude adjustments, and mission commands. Common communication methods for UAV A2G communication include wireless RF communication and optical communication.
A2G communication uses different communication methods based on specific tasks. To ensure the communication link between the UAV and the ground command center, optical communication technology is generally integrated with the UAV flight platform in environments with frequent emergencies and complex electromagnetic components. For example, in major natural disasters such as tsunamis, earthquakes, and typhoons, which can cause widespread destruction of buildings and the paralysis of communication and power infrastructure, it becomes particularly crucial to rapidly establish an information transmission network in the disaster area [97]. Due to the harsh ground conditions in the disaster area and the inability of vehicles to approach, UAV optical communication technology is considered for establishing a dynamic optical network in the disaster zone.
A2G communication can be classified into UAV-to-ground fixed terminals, and UAV-to-ground mobile terminals. On the one hand, integrated solutions designed for these needs can leverage the comprehensive advantages of UAVs, such as high spatial freedom, short deployment time, strong directional capabilities of optical wireless technology, and high capacity. By constructing airborne mobile relays, high-capacity transmission links can be rapidly established between fixed-position ground terminals. On the other hand, in applications such as reconnaissance and communication, UAVs often need to carry out high-speed data transmission and command delivery to mobile terminals such as vehicles and robots [98]. For this scenario, it is essential to fully consider the dynamic characteristics of UAVs and ground mobile terminals, and propose appropriate communication solutions to maximize the potential and effectiveness of these integrated technologies.
Current research on communication between UAVs and ground base stations primarily focuses on communication between fixed ground terminals and UAVs in a hovering state. The optical communication link between flying UAVs and ground mobile platforms still requires further exploration and study. Future research will focus on ensuring stable optical communication links between UAVs in motion and ground mobile terminals.
6.2. UAV A2A Communication
The communication link between UAVs is called the A2A link. This communication method allows UAVs to form a reliable communication network through mutual communication and collaboration without the support of ground base stations. It holds significant potential for communication needs in situations such as emergency rescue, post-disaster reconstruction, and outdoor expeditions. With the advancement of optical wireless communication technology in the UAV field, an increasing number of researchers have realized that a single UAV cannot complete tasks independently. Collaboration among UAVs, or even UAV swarms, can further enhance their ability to execute missions. The design and implementation of A2A communication links for UAVs need to consider various factors, including the line-of-sight components, bandwidth requirements, antenna technology, mobility, and the impact of terrain and obstacles.
As the complexity of UAV missions increases and the demand for tasks grows, intelligent UAV swarms have emerged. Intelligent UAV swarms require mutual collaboration among UAVs, and real-time communication is necessary for achieving information sharing. Therefore, the modeling of UAV optical communication links will be a key research focus of future studies.
Regarding optical communication between drones, many researchers have conducted channel modeling and experimental verification. In Ref. [99], considering the issue of hovering drone jitter, a directional error model was proposed. Based on the Lambertian model, the received power distribution with random UAV jitter was derived. Researchers from Iran and the UK have proposed a closed-form expression for the link outage probability based on a log-normal turbulence channel model under weak turbulence conditions for UAV optical communication. They subsequently proposed a closed-form expression for the link outage probability based on a Gamma–Gamma turbulence channel model under moderate to strong turbulence conditions [100]. The study considers multiple factors that affect link performance, such as UAV pointing errors, receiver field of view, atmospheric turbulence, and others. To validate the accuracy of the results, the research compares the Monte Carlo simulation results with the computed results of the closed-form expression for the outage probability, thereby demonstrating the effectiveness of the proposed method. A research team from the University of Oklahoma in the United States first proposed an analysis of the open-loop alignment and stability of multi-rotor UAVs in a hovering state. Using the quasi-average rate as an indicator, it was demonstrated that UAV optical communication technology possesses high throughput [101].
Since optical communication is a directional communication technology, most research on optical communication between UAVs focuses on scenarios where the UAVs are in a hovering or relatively stationary state. The flexibility and high maneuverability of UAV swarms are significant advantages in executing complex tasks. Therefore, maintaining the stability of directional optical communication links under high-mobility conditions has become a key research focus in the development of optical communication technology for UAV swarms. To address this issue, it is necessary to tackle the fundamental problem of optical wireless communication links between UAVs, commonly referred to in the industry as the A2A problem [101].
In conclusion, UAV optical communication networking technology plays a crucial role in both A2G and A2A environments. This technology compensates for the limitations of traditional RF communication methods and significantly enhances the data transmission capacity of UAVs. Unlike traditional RF communication, optical communication offers higher security, as its frequency band does not overlap with that of RF communication and is less susceptible to electromagnetic interference. Moreover, optical signals have a narrow beam and strong directional propagation, making them difficult to eavesdrop on or interfere with. As a result, optical communication technology proves to be more suitable for applications that require high security.
7. Conclusions
With the continuous advancement of UAV swarm technology, its applications across various fields are becoming increasingly significant, prompting countries around the world to intensify efforts in developing related technologies. As one of the core technologies for intelligent swarms, swarm networking and communication technology has attracted significant attention. However, electromagnetic interference poses a serious threat to UAV swarm communication, making the research into anti-jamming communication technologies particularly critical. Optical communication technology, which has been widely applied in satellites, UAVs, and other fields, offers unmatched advantages in terms of high bandwidth and exceptional anti-interference capabilities. When applied to swarm networking, optical communication can significantly enhance the mission execution capabilities of UAV swarms, enabling secure, reliable, high-speed, and stable communication links. It is poised to become one of the key technologies for constructing future integrated air-ground networks. This paper analyzes existing UAV communication methods, characteristics, and technical requirements, and proposes a UAV optical communication architecture based on VCSEL and APD. The findings indicate that this architecture can partially fulfill the communication demands of UAV systems.
At present, UAV swarm optical communication technology still faces many challenges in terms of environmental adaptability, resource limitations, and technical implementation. These challenges mainly include atmospheric effects, alignment accuracy requirements, transmission distance limitations, and power consumption constraints.
However, with the continuous development of intelligent technology, energy transmission and adaptive technology, future UAV swarm optical communication technology is expected to improve transmission stability through adaptive beamforming technology. To overcome the limitations of single optical communication in practical applications, future UAV swarms may adopt hybrid communication technology. At the same time, by optimizing and adjusting the frequency, wavelength, and power of the beam, the atmospheric attenuation of the optical signal can be reduced. Additionally, new laser and sensor technologies are expected to mitigate the effects of atmospheric interference. The development of technology will enable optical communication systems to be widely applied to various low-cost UAVs, thereby enhancing their feasibility in commercial applications. These advancements will provide the technological support for the extensive application and large-scale deployment of UAV swarms, promoting the practical application of UAV swarms in various fields.
Author Contributions
Conceptualization, S.C. and W.L.; methodology, S.C., W.L. and W.Z.; validation, S.C., F.L. and S.W.; formal analysis, S.C., S.W. and Y.Y.; investigation, S.C., S.Z. and Y.Y.; resources, S.C., W.L. and S.Z.; data curation, S.C., W.L. and S.W.; writing—original draft preparation, S.C. and W.L.; writing—review and editing, S.C., W.Z. and T.Z.; visualization, S.C. and F.L.; supervision, S.C., W.Z. and T.Z.; project administration, S.C., W.L., Y.Y. and W.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China, grant number 12227901.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| UAV | Unmanned aerial vehicle |
| RF | Radio frequency |
| FEMA | Federal Emergency Management Agency |
| NOAA | National Oceanic and Atmospheric Administration |
| RSD | Remote Sensing Division |
| COVID-19 | Coronavirus Disease 2019 |
| FSO | Free Space Optical Communication |
| FANET | Flying Ad Hoc Network |
| MANET | Electromagnetic interference |
| BER | bit error rate |
| FM | Frequency Modulation |
| AM | Amplitude Modulation |
| EMI | Electromagnetic interference |
| ATP | Automatic tracking platform |
| QAM | Quadrature Amplitude Modulation |
| OFDM | Orthogonal Frequency Division Multiplexing |
| CW | continuous wave |
| CBC | coherent beam combining |
| OPA | optical phased arrays |
| OAM | orbital angular momentum |
| DMD | digital micromirror device |
| MIMO | Multiple-Input Multiple-Output |
| VLC | Visible Light Communication |
| CCD | Charge-Coupled Device |
| ITS | Intelligent Transportation Systems |
| IoT | Internet of Things |
| OOK | On–Off Keying |
| VCSEL | Vertical Cavity Surface Emitting Laser |
| APD | Avalanche Photodiode |
| LED | Light Emitting Diodes |
| AGC | automatic gain control |
| BiCMOS | Bipolar Complementary Metal-Oxide-Semiconductor |
| OWC | Optical Wireless Communication |
| CMOS | Complementary Metal-Oxide-Semiconductor |
| TIA | Transimpedance Amplifier |
| RS | Reed–Solomon |
| IM/DD | Intensity Modulation with Direct Detection |
| PIN | photodiode |
| PMT | photomultiplier tube |
| SPD | single photon detector |
| AMC | Adaptive Modulation and Coding |
| A2G | air-to-ground |
| A2A | air-to-air |
| GCS | Ground Control Station |
| PMT | Photomultiplier tube |
| SPD | Single photon detector |
| A2G | Air-to-ground |
| A2A | Air-to-air |
References
- Liu, X.G.; Liu, M.; Mao, Z.Y.; Hu, H.; Xu, J.W.; Wang, H.B. Application of Wireless Laser Communication in Large-scale Marine Unmanned Aerial Vehicles. Study Opt. Commun. 2021, 47, 59–63. [Google Scholar]
- Abdelkader, M.; Güler, S.; Jaleel, H.; Shamma, J.S. Aerial swarms: Recent applications and challenges. Curr. Robot. Rep. 2021, 2, 309–320. [Google Scholar] [CrossRef]
- Li, J.; Chen, S.C. Overview of Key Technology and Its Development of Drone Swarm. Acta Armamentarii 2023, 44, 2533–2545. [Google Scholar]
- Adoni, W.Y.H.; Fareedh, J.S.; Lorenz, S.; Gloaguen, R.; Madriz, Y.; Singh, A.; Kühne, T.D. Intelligent Swarm: Concept, Design and Validation of Self-Organized UAVs Based on Leader–Followers Paradigm for Autonomous Mission Planning. Drones 2024, 8, 575. [Google Scholar] [CrossRef]
- Hong, J.Z.; Ou, Z.W.; Chu, K.K.; Sun, L.P. Feasibility and Superiority of Electromagnetic Countermeasures Against UAV Swarm. In Proceedings of the 12th China Command and Control Conference, Beijing, China, 17–19 May 2024. [Google Scholar]
- Bi, Z.S. Emergency UAV Deployment Optimization in an Integrated Air-ground Network with Joint Communication and Localization Service. Chin. J. Internet Things 2024, 8, 1–15. [Google Scholar]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.F.; Zhao, N. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Xue, F.F.; Zhao, S.H.; Li, Y.J.; Tian, Q.; Fu, H.T. Application of optical communication technology of large-scale UAV based on aviation backbone network. Infrared Laser Eng. 2023, 52, 208–215. [Google Scholar]
- Merwaday, A.; Guvenc, I. UAV assisted heterogeneous networks for public safety communications. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), New Orleans, LA, USA, 9–12 March 2015. [Google Scholar]
- Nzekwu, N.J.; Fernandes, M.A.; Fernandes, G.M. A Comprehensive Review of UAV-Assisted FSO Relay Systems. Photonics 2024, 11, 274. [Google Scholar] [CrossRef]
- Salmoral, G.; Rivas Casado, M.; Muthusamy, M.; Butler, D.; Menon, P.P.; Leinster, P. Guidelines for the Use of Unmanned Aerial Systems in Flood Emergency Response. Water 2020, 12, 521. [Google Scholar] [CrossRef]
- Hann, A.; Anderson, M.; Dwyer, L.; Blancher, J.; Cox, C.; Nakamura, L.; Gallagher, M. NOAA Uncrewed Aircraft Systems Report for Fiscal Year 2023; NOAA: Silver Spring, MD, USA, 2024. [Google Scholar]
- Petrova, A.V. Prospects for development of contactless delivery in Russia. AIP Conf. Proc. 2023, 2624, 040031. [Google Scholar]
- Zhong, J.W. Emergency Take-Off! The Application of Drones in Emergency Rescue and Disaster Relief. China Daily. 10 August 2021. Available online: https://tech.chinadaily.com.cn/a/202108/10/WS6111d9a5a3101e7ce975df3f.html (accessed on 12 February 2025).
- Xin, Y. 2021 unmanned Aerial Vehicle Meteorological Observation Research Experiment Launched. China Science Daily. 11 November 2021. Available online: https://paper.sciencenet.cn/htmlnews/2021/11/469814.shtm (accessed on 12 February 2025).
- Bayraktar, S.; Fainekos, G.E.; Pappas, G.J. Experimental cooperative control of fixed-wing unmanned aerial vehicles. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No. 04CH37601), Nassau, Bahamas, 14–17 December 2004; Volume 4, pp. 4292–4298. [Google Scholar]
- Liu, Y.; Lin, J.; Teng, J. Design of Emergency Rescue Equipment for Epidemic Disasters. Art Des. 2022, 2, 110–113. [Google Scholar]
- Zhuang, K. Research on Joint Communication and Positioning Resource Scheduling Method for UAV-Assisted Emergency Command Sites. Master’s Thesis, Beijing University of Posts and Telecommunications, Beijing, China, 2023. [Google Scholar]
- Fei, C.; Zhao, L.; Sun, X.K.; Lu, Y.; Zhang, F. Research on the Development of UAV Swarm Technologies. J. Gun Launch Control 2024, 45, 50–60. [Google Scholar]
- Ramya, C.M.; Shanmugaraj, M.; Prabakaran, R. Study on ZigBee technology. In Proceedings of the 2011 3rd International Conference on Electronics Computer Technology, Kanyakumari, India, 8–10 April 2011; IEEE: Piscataway Township, NJ, USA, 2011; Volume 6, pp. 297–301. [Google Scholar]
- Agarwal, N.; Singla, J.; Dhaka, V.S. Indigenous IoT and software framework for implementing Digital Twin over Indian region towards sustainable development. In Proceedings of the 2024 International Conference on Computing, Sciences and Communications, Ghaziabad, India, 24–25 October 2024; IEEE: Piscataway Township, NJ, USA, 2024; pp. 1–5. [Google Scholar]
- Deng, C.; Fang, X.; Han, X.; Wang, X.; Yan, L.; He, R.; Guo, Y. IEEE 802.11 be Wi-Fi 7: New challenges and opportunities. IEEE Commun. Surv. Tutor. 2020, 22, 2136–2166. [Google Scholar] [CrossRef]
- Wang, H.; Fapojuwo, A.O. A survey of enabling technologies of low power and long range machine-to-machine communications. IEEE Commun. Surv. Tutor. 2017, 19, 2621–2639. [Google Scholar] [CrossRef]
- Dangi, R.; Lalwani, P.; Choudhary, G.; You, I.; Pau, G. Study and investigation on 5G technology: A systematic review. Sensors 2021, 22, 26. [Google Scholar] [CrossRef]
- Chen, S.H.; Mo, J.Q.; Mo, X.X. Development and Key Technologies of Airborne LEO Satellite Communication: A Review. Telecommun. Eng. 2024, 64, 149–157. [Google Scholar]
- Grover, A.; Sheetal, A. A 2 × 40 Gbps Mode Division Multiplexing Based Inter-satellite Optical Wireless Communication (IsOWC) System. Wirel. Pers. Commun. 2020, 114, 2449–2460. [Google Scholar] [CrossRef]
- Wang, K.; Zhu, B.; Wei, Y.; Wang, C.; Zhou, W.; Zhao, L.; Yu, J. Demonstration of DSM-1024QAM signals transmission in a 96 channel WDM-FSO system for mobile fronthaul. Sci. China Technol. Sci. 2023, 66, 3048–3050. [Google Scholar] [CrossRef]
- El-Mashade, M.B.; Aly, M.H.; Toeima, A.H. Performance evaluation of FSO system with MIMO technique in different operating environments. Phys. Sci. Int. J. 2015, 7, 33–48. [Google Scholar] [CrossRef]
- Korai, U.A.; Shaikh, F.K.; Kalwar, S.; Soothar, K.K.; Muneer, B.; Solangi, A. Analyzing the quality of free space optical signal in fog: A case study of Pakistan. Wirel. Pers. Commun. 2017, 95, 569–579. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, S. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Hu, F.; Ou, D.; Huang, X.L. UAV Swarm Networks: Models, Protocols, and Systems; CRC Press: London, UK, 2020. [Google Scholar]
- Chu, H.L.; Chen, M.; Jin, C.H.; Dou, X.L. Design of unmanned aerial vehicle networks supporting swarm applications. Cyberspace Secur. 2019, 10, 8. [Google Scholar]
- Yan, X.; Fang, X.; Deng, C.; Wang, X. Joint Optimization of Resource Allocation and Trajectory Control for Mobile Group Users in Fixed-Wing UAV-Enabled Wireless Network. IEEE Trans. Wirel. Commun. 2024, 23, 1608–1621. [Google Scholar] [CrossRef]
- Yang, F.; Cheng, J.; Tsiftsis, T.A. Free-space optical communication with nonzero boresight pointing errors. IEEE Trans. Commun. 2014, 62, 713–725. [Google Scholar] [CrossRef]
- Guo, W.; Zhan, Y.; Tsiftsis, T.A.; Yang, L. Performance and channel modeling optimization for hovering UAV-assisted FSO links. J. Light. Technol. 2022, 40, 4999–5012. [Google Scholar] [CrossRef]
- Singh, D.; Swaminathan, R. Comprehensive performance analysis of hovering UAV-based FSO communication system. IEEE Photonics J. 2022, 14, 7352013. [Google Scholar] [CrossRef]
- Wan, C.; Jia, X.Q.; Kang, L.; Chen, J.; Wang, H.B.; Wu, P.H. Application of Single Photon Detection in Wireless Optical Communication Transceiver Technology. Laser Optoelectron. Prog. 2022, 59, 11–26. [Google Scholar]
- Chen, J.J.; Zhou, M.Y.; Li, M. An Overview of Application of 5G-based UAV System in Public Safety. In Proceedings of the 2019 National Symposium on Public Safety Communication, Urumqi, China, 15–16 August 2019; Publishing House of Electronics Industry: Beijing, China, 2019; pp. 251–256. [Google Scholar]
- Li, L.; Zhang, R.; Liao, P.; Cao, Y.; Song, H.; Zhao, Y.; Du, J.; Zhao, Z.; Liu, C.; Pang, K. Mitigation for turbulence effects in a 40-Gbit/s orbital-angular-momentum-multiplexed free-space optical link between a ground station and a retro-reflecting UAV using MIMO equalization. Opt. Lett. 2019, 44, 5181–5184. [Google Scholar] [CrossRef] [PubMed]
- Fan, T.; Zhang, L.Z.; Meng, L.X. Research on fine tracking control technology of main optical transceiver is space optical communication network. Laser J. 2021, 42, 112–117. [Google Scholar]
- Feng, S.M.; Zaho, Y.D.; Dong, C.; Wu, Q.H. Key Technologies and Development Trends of Free Space Optical UAV Communication Network. J. Electron. Inf. Technol. 2024, 46, 2311–2322. [Google Scholar]
- Chen, K.; Cheng, K.W.E.; Yang, Y.; Pan, J. A fast self-positioning-based optimal frequency control for inductive wireless power transfer systems without communication. IEEE Trans. Ind. Electron. 2022, 70, 334–343. [Google Scholar] [CrossRef]
- Choi, M.; Song, S.; Ko, D.E.; Chung, J.M. Trajectory optimization for fso based u-iot backhaul networks. IEEE Trans. Netw. Sci. Eng. 2023, 10, 2030–2044. [Google Scholar] [CrossRef]
- Bashir, M.S.; Alouini, M.S. Energy optimization of a laser-powered hovering-UAV relay in optical wireless backhaul. IEEE Trans. Wirel. Commun. 2022, 22, 3216–3230. [Google Scholar] [CrossRef]
- Saxena, P.; Chung, Y.H. Analysis of jamming effects in IRS assisted UAV dual-hop FSO communication systems. IEEE Trans. Veh. Technol. 2023, 72, 8956–8971. [Google Scholar] [CrossRef]
- DJI Mavic 3 Technical Support. Available online: https://www.dji.com/cn/support/product/mavic-3 (accessed on 12 February 2025).
- DJI Mini 3 Pro Technical Support. Available online: https://www.dji.com/cn/support/product/mini-3-pro (accessed on 12 February 2025).
- EVO-II-Drones. Available online: https://www.autelrobotics.com/productdetail/evo-ii-drones/ (accessed on 12 February 2025).
- Jingwei 300 RTK Technical Support. Available online: https://www.dji.com/cn/support/product/matrice-300 (accessed on 12 February 2025).
- eBee XFixed Wing UAV. Available online: https://optron.com/sensefly/portfolio/ebee-x/ (accessed on 12 February 2025).
- Zountouridou, E.; Kiokes, G.; Dimeas, A.; Prousalidis, J.; Hatziargyriou, N. A guide to unmanned aerial vehicles performance analysis—the MQ-9 unmanned air vehicle case study. The Journal of Engineering 2023, 6, 12270. [Google Scholar] [CrossRef]
- Carreño Ruiz, M.; Bloise, N.; Guglieri, G.; D’Ambrosio, D. Toward Virtual Testing of Unmanned Aerial Spraying Systems Operating in Vineyards. Drones 2024, 8, 98. [Google Scholar] [CrossRef]
- China Mobile Fujian Company; China Mobile Chengdu Institute of Research and Development; Huawei Technologies Co., Ltd. White Paper on 5G Communication Technology-Based Three-Dimensional Coverage Networks for UAVs. 2021. Available online: https://www-file.huawei.com/-/media/corporate/pdf/news/3d-coverage-network-for-uavs-based-on-5g-communications-technology-whitepaper.pdf?la=zh (accessed on 12 February 2025).
- Liu, H.Y.; Zhang, Y.; Liu, X.Y.; Sun, L.Y.; Fan, P.F.; Tian, X.H.; Pan, D.; Yuan, M.; Yin, Z.J.; Long, G.L. High-speed free-space optical communication using standard fiber communication components without optical amplification. Adv. Photonics Nexus 2023, 2, 065001. [Google Scholar] [CrossRef]
- Tu, C.; Shen, J.; Dai, J.; Zhang, L.; Wang, J. A Lower Size, Weight Acquisition and Tracking System for Airborne Quantum Communication. IEEE Photonics J. 2022, 14, 1–8. [Google Scholar] [CrossRef]
- Zhan, W.D.; Li, H.Z.; Wang, Z.J. High-Frequency and High-Power Laser Modulator in Space Optical Communications. Laser Optoelectron. Prog. 2016, 47, 120604. [Google Scholar] [CrossRef]
- Yoshida, M.; Katsuno, S.; Inoue, T.; Gelleta, J.; Izumi, K.; De Zoysa, M.; Noda, S. High-brightness scalable continuous-wave single-mode photonic-crystal laser. Nature 2023, 618, 727–732. [Google Scholar] [CrossRef]
- He, C.; Ali, W. Advances in Visible Light Communication. Photonics 2023, 10, 1277. [Google Scholar] [CrossRef]
- Balasiano, O.; Wohlgemuth, E.; Attia, I.; Roizman, A.; Falk, T.; Vered, R. Demonstration of coherent beam combining for atmospheric free space optical communication over 10 km. J. Light. Technol. 2024, 42, 7085–7094. [Google Scholar] [CrossRef]
- Qi, W.; Ni, Y.; Liao, Z.; Yang, C.; Li, Z.; Zhang, C.; Yu, Y.; Zhang, X. On-Chip 3.2 Tb/s Wireless Optical Interconnects Using Diffraction-Free Beam and Microcomb. J. Light. Technol. 2024, 42, 8640–8646. [Google Scholar] [CrossRef]
- Xi, R.; Zhu, B. Experimental study on short-distance free-space transmission characteristics of OAM beam. Optoelectronics 2019, 46, 16–25. [Google Scholar]
- Li, G.; Niu, W.; Ha, Y.; Hu, F.; Wang, J.; Yu, X.; Chi, N. Position-Dependent MIMO De-multiplexing Strategy for High-Speed Visible Light Communication in Internet of Vehicles. IEEE Internet Things J. 2022, 13, 10833–10850. [Google Scholar] [CrossRef]
- Xue, L. Research and Implementation on Key Technology of Outdoor Long-Distance Visible Light Communication System. Doctoral Dissertation, Xi’an University of Electronic Science and Technology, Xi’an, China, 2015. [Google Scholar]
- Lin, Y.M. Research of Demodulation Method of Free-Space Optical Communication. Doctoral Dissertation, Beijing University of Posts and Telecommunications, Beijing, China, 2015. [Google Scholar]
- Chow, C.W. Recent advances and future perspectives in optical wireless communication, free space optical communication and sensing for 6G. J. Light. Technol. 2024, 42, 3972–3980. [Google Scholar] [CrossRef]
- Heo, Y.; Yeo, C.I.; Park, S.; Kang, H.S. Demonstration and Analysis of Outdoor OWC System using FPGA-based 2.5 Gigabit Ethernet including FEC. In Proceedings of the 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 19–21 October 2022; IEEE: Piscataway Township, NJ, USA, 2022; pp. 2338–2340. [Google Scholar]
- Yeh, C.H.; Luo, C.M.; Xie, Y.R.; Chow, C.W.; Chen, R.B.; Tseng, M.C. Demonstration of 1-Gbps real-time optical wireless communication by simple transmission scheme. Opt. Quantum Electron. 2020, 52, 1–7. [Google Scholar] [CrossRef]
- Amjad, M.S.; Tebruegge, C.; Memedi, A.; Kruse, S.; Kress, C.; Scheytt, J.C.; Dressler, F. Towards an IEEE 802.11 compliant system for outdoor vehicular visible light communications. IEEE Trans. Veh. Technol. 2021, 70, 5749–5761. [Google Scholar] [CrossRef]
- Perahia, E. IEEE 802.11 n development: History, process, and technology. IEEE Commun. Mag. 2008, 46, 48–55. [Google Scholar] [CrossRef]
- Umair, M.A.; Seminara, M.; Meucci, M.; Fattori, M.; Bruni, F.; Brovelli, S.; Catani, J. Long-Range Optical Wireless Communication System Based on a Large-Area, Q-Dots Fluorescent Antenna. Laser Photonics Rev. 2023, 17, 2200575. [Google Scholar] [CrossRef]
- Nistazakis, H.E.; Karagianni, E.A.; Tsigopoulos, A.D.; Fafalios, M.E.; Tombras, G.S. Average capacity of optical wireless communication systems over atmospheric turbulence channels. J. Light. Technol. 2009, 27, 974–979. [Google Scholar] [CrossRef]
- Meng, F.S.; Qu, H.W.; Zhou, X.Y.; Qi, A.Y.; Sui, J.T.; Zheng, W.H. High Power Multi-Junction 808 nm Vertical Cavity Surface Emitting Lasers with High Efficiency. IEEE Photonics Technol. Lett. 2024, 36, 1489–1492. [Google Scholar] [CrossRef]
- Ping, S.; Bo, X.Y.; Liang, D.H.; Gang, J.Z.; Wei, J.; Jian, L.; Yong, W.Z.; She, X.B. High-performance multi-junction cascade 1.3 μm quantum dot vertical cavity surface-emitting laser. Opt. Lett. 2024, 49, 1437–1440. [Google Scholar] [CrossRef]
- An, B.; Wang, Y.K.; Wang, Y.C.; Zou, Z.J.; Mei, Y.; Long, H.; Zheng, Z.W.; Zhang, B.P. Structure Design of UVA VCSEL for High Wall Plug Efficiency and Low Threshold Current. Photonics 2024, 11, 1012. [Google Scholar] [CrossRef]
- Tan, Y.; Wang, W. Design and simulation of high power 1 550 nm multi-junction VCSEL. J. Optoelectron.·Laser 2024, 35, 475–482. [Google Scholar]
- Murty, M.V.R.; Wang, J.Y.; Jiang, S.Z.; Dolfi, D.; Wang, T.K.; Vaughan, D.; Feng, Z.W.; Leong, N.; Sridhara, A.; Joyo, S.T. Advances in VCSEL-based Multimode Links. In Proceedings of the IEEE-Photonics-Society Summer Topicals Meeting (SUM), Bridgetown, Barbados, 15–17 July 2024. [Google Scholar]
- Milovančev, D.; Jukić, T.; Vokić, N.; Brandl, P.; Steindl, B.; Zimmermann, H. VLC using 800-μm diameter APD receiver integrated in standard 0.35-μm BiCMOS technology. IEEE Photonics J. 2020, 13, 7900513. [Google Scholar] [CrossRef]
- Zhou, X.; Li, J.; Lu, W.; Wang, Y.; Song, X.; Yin, S.; Feng, Z. Large-area 4H-SiC avalanche photodiodes with high gain and low dark current for visible-blind ultraviolet detection. Chin. Opt. Lett. 2018, 16, 060401. [Google Scholar] [CrossRef]
- Gasser, C.; Zimmermann, H. Highly sensitive monolithic optoelectronic receiver with large-area avalanche photodiode for optical wireless communication at low data rates. Opt. Eng. 2021, 60, 075109. [Google Scholar] [CrossRef]
- Mohamed, S.E.D.N.; Mohamed, A.E.N.A.; El-Samie, F.E.A.; Rashed, A.N.Z. Performance enhancement of IM/DD optical wireless systems. Photonic Netw. Commun. 2018, 36, 114–127. [Google Scholar] [CrossRef]
- Wang, S.X.; Zheng, W.B.; Wang, S.L.; Qu, Y.Z.; Yuan, S.D.; Yuan, Y.Y. Demonstration and Analysis of a 100-Mbps Real-Time Daytime OWC System. In Proceedings of the 2024 Asia Communications and Photonics Conference (ACP) and International Conference on Information Photonics and Optical Communications (IPOC), Beijing, China, 2–5 November 2024; IEEE: Piscataway Township, NJ, USA, 2024; pp. 1–4. [Google Scholar]
- Xiong, X.R.; Zheng, W.B.; Wang, S.W. Low-Delay Modified OLSR Scheme for Flying AdHoc Networks. In Proceedings of the 2024 Asia Communications and Photonics Conference (ACP) and International Conference on Information Photonics and Optical Communications (IPOC), Beijing, China, 2–5 November 2024; pp. 1–5. [Google Scholar]
- García-Zambrana, A.; Castillo-Vázquez, C.; Castillo-Vázquez, B. Rate-adaptive FSO links over atmospheric turbulence channels by jointly using repetition coding and silence periods. Opt. Express 2010, 18, 25422–25440. [Google Scholar] [CrossRef]
- Wang, T.; Tian, R.; Zhu, R.; Jiang, L.; Tong, C.; Lu, H. Improved underwater wireless optical communication using a passively mode-locked VECSEL. Opt. Commun. 2023, 547, 129850. [Google Scholar] [CrossRef]
- Fontoynont, M. LED lighting, ultra-low-power lighting schemes for new lighting applications. C. R. Phys. 2018, 19, 159–168. [Google Scholar] [CrossRef]
- Zou, L. The Atmospheric Turbulence Mitigation Scheme in Orbital-Angular-Momentum Multiplexed System. Doctoral Dissertation, Nanjing University of Posts and Telecommunications, Nanjing, China, 2017. [Google Scholar]
- Liao, S.K.; Cai, W.Q.; Liu, W.Y.; Zhang, L.; Li, Y.; Ren, J.G. Satellite-to-ground quantum key distribution. Nature 2017, 549, 43–47. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Ren, F.; Peng, X.; Zhang, X.; Chen, G. Research on CRC-LT coding performance in free space optical communication. Infrared Laser Eng. 2018, 47, 1122003. [Google Scholar]
- Ke, X.Z.; Liang, J.Y.; Xu, D.S. Research progress of pulse position modulation technology in optical wireless communication. Opto-Electron. Eng. 2022, 49, 210387. [Google Scholar]
- Saxena, V.; Tullberg, H.; Jaldén, J. Model-based adaptive modulation and coding with latent thompson sampling. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Helsinki, Finland,, 13–16 September 2021. [Google Scholar]
- Yang, S.J.; He, Z.P.; Jia, J.J.; Wu, J.C.; Wang, J.Y. Research of the Transmittance of Atmospheric Turbulent Channels. Chin. J. Lasers 2010, 44, 2860–2863. [Google Scholar] [CrossRef]
- Yang, H.Z.; Li, X.Y.; Jiang, W.H. Applications of Adaptive Optics Technology in Atmospheric Laser Communications System. Laser Optoelectron. Prog. 2007, 44, 61–68. [Google Scholar]
- Zhou, X.T.; Yang, X.H.; Zhang, H.X.; Deng, Y.Q. Joint Optimization of Task Offloading and Resource Allocation for Unmanned Aerial Vehicle-assisted Edge Computing Network. J. Electron. Inf. Technol. 2024, 46, 4399–4408. [Google Scholar]
- Li, N. Current status and development trend of satellite laser communication. Int. J. Inf. Commun. Sci. 2023, 8, 26–32. [Google Scholar] [CrossRef]
- Li, M.; Hong, Y.; Zeng, C.; Song, Y.; Zhang, X. Investigation on the UAV-to-satellite optical communication systems. IEEE J. Sel. Areas Commun. 2018, 36, 2128–2138. [Google Scholar] [CrossRef]
- Zheng, A.R. Analysis for In-Flight UAV Free-Space Optical Communication Link and Application in Formation Reconfiguration Algorithms. Master’s Thesis, Zhejiang University, Hangzhou, China, 2021. [Google Scholar]
- Yang, Y.; Chen, M.; Guo, C.; Feng, C.; Saad, W. Power efficient visible light communication with unmanned aerial vehicles. IEEE Commun. Lett. 2019, 3, 1272–1275. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, K.; Zhu, B.; Wang, W.; Zhang, Z. Visible light communications for unmanned aerial vehicle: Channel modeling and experimental validation. IEEE Commun. Lett. 2023, 27, 1530–1534. [Google Scholar] [CrossRef]
- Dabiri, M.T.; Sadough, S.M.S.; Ansari, I.S. Tractable optical channel modeling between UAVs. IEEE Trans. Veh. Technol. 2019, 68, 11543–11550. [Google Scholar] [CrossRef]
- Kaadan, A.; Refai, H.H.; Lopresti, P.G. Multielement FSO transceivers alignment for inter-UAV communications. J. Light. Technol. 2014, 32, 4785–4795. [Google Scholar] [CrossRef]
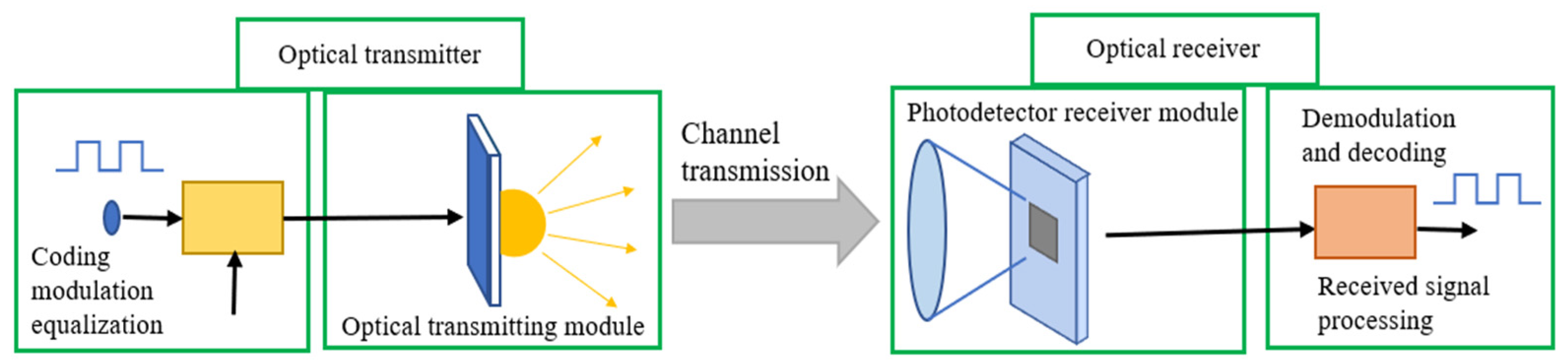
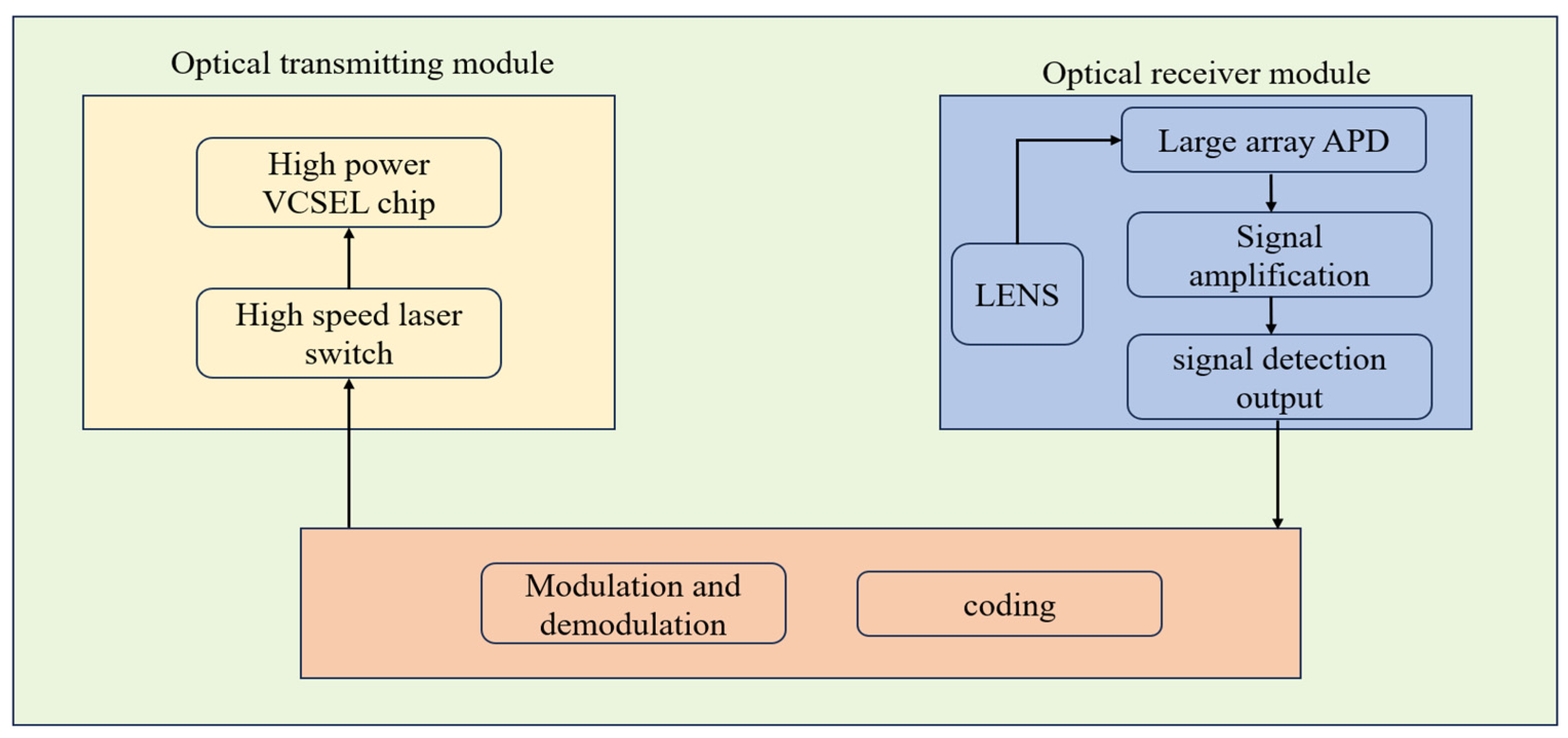
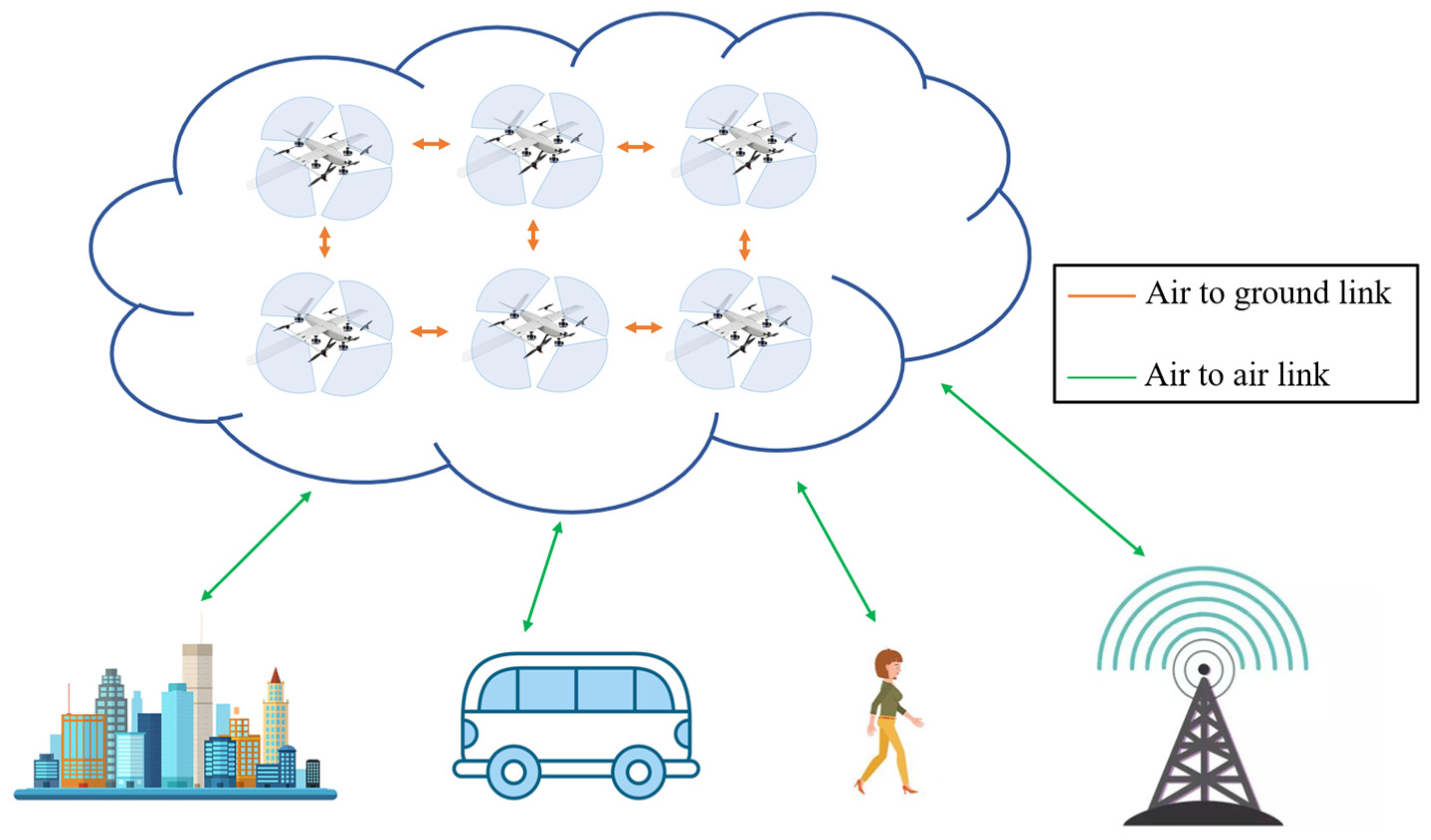
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).