1. Introduction
The charge-coupled device (CCD)-based mobile optoelectronic tracking system (MOTS), commonly mounted on vehicles, ships, airplanes and satellites, is mainly used for astronomical observation, free space communication, searching and target tracking [
1,
2,
3,
4,
5]. The closed-loop control of the system is based on the boresight error detected by a CCD. The value of boresight error could reflect the tracking performance (TP) and anti-disturbance ability (ADA), both of which are equally important in a moving platform being full of various disturbances. Due to the image integration time of the CCD, the position tracking loop would be subject to a non-negligible delay and low-sampling rate [
6,
7], which are major causes of instability and performance deterioration [
8,
9,
10]. Scholars have adopted many optimization methods to enhance the tracking accuracy and decrease the bad influence of the delay. A PID-I method, with an integration added to the controller, was proposed to reduce the steady-state error of the system [
11], which, however, would affect the stability of the system and decrease its dynamic performance. In order to eliminate the effect of delay on system stability, a Smith predictor was introduced to the tracking loop [
12,
13]; however, the delay was moved out from the closed loop but still existed in the system, which would restrict the TP. As reported, a multi-loop control structure based on MEMS inertial sensors could increase the bandwidth of the system [
14]. Nevertheless, there was little low-frequency improvement of TP. Compared to the difficulties in enhancing the TP, the ADA of the system is relatively easier to improve, for the disturbances usually originate from the base which could be measured by inertial sensors with little delay. Therefore, an inertial sensor, such as a fiber-optic gyroscope (FOG) mounted parallel to the boresight, is commonly used to establish a high-rate inner loop, which would increase the whole ADA of the system [
15,
16]. However, the ADA of the closed-loop control is still insufficient for plant uncertainties and large-magnitude disturbances. In summary, the feedback control method is limited in improving either the TP or ADA of the system.
In order to get a satisfactory performance, it is necessary to perform feedforward control, including the tracking and disturbance feedforward. Theoretically, the errors could be significantly reduced or even eliminated, and almost all measurable disturbances could be suppressed. Unfortunately, it was difficult to get the trajectory of the target and extract the disturbance signals. A predictive tracking method combining the boresight error with angular sensor for synthesizing the target trajectory was proposed to compensate the errors caused by time delay [
17,
18]. However, an additional position sensor was required, which was only suitable for the condition with low measurement noise. Similarly, in order to detect the disturbances, additional sensors should be equipped on the pedestal [
19,
20]; the wind disturbance and cogging force cannot be reflected from the pedestal. Hence, the feedforward control based on direct measurement could not be easily implemented, especially for the space and cost limited occasions.
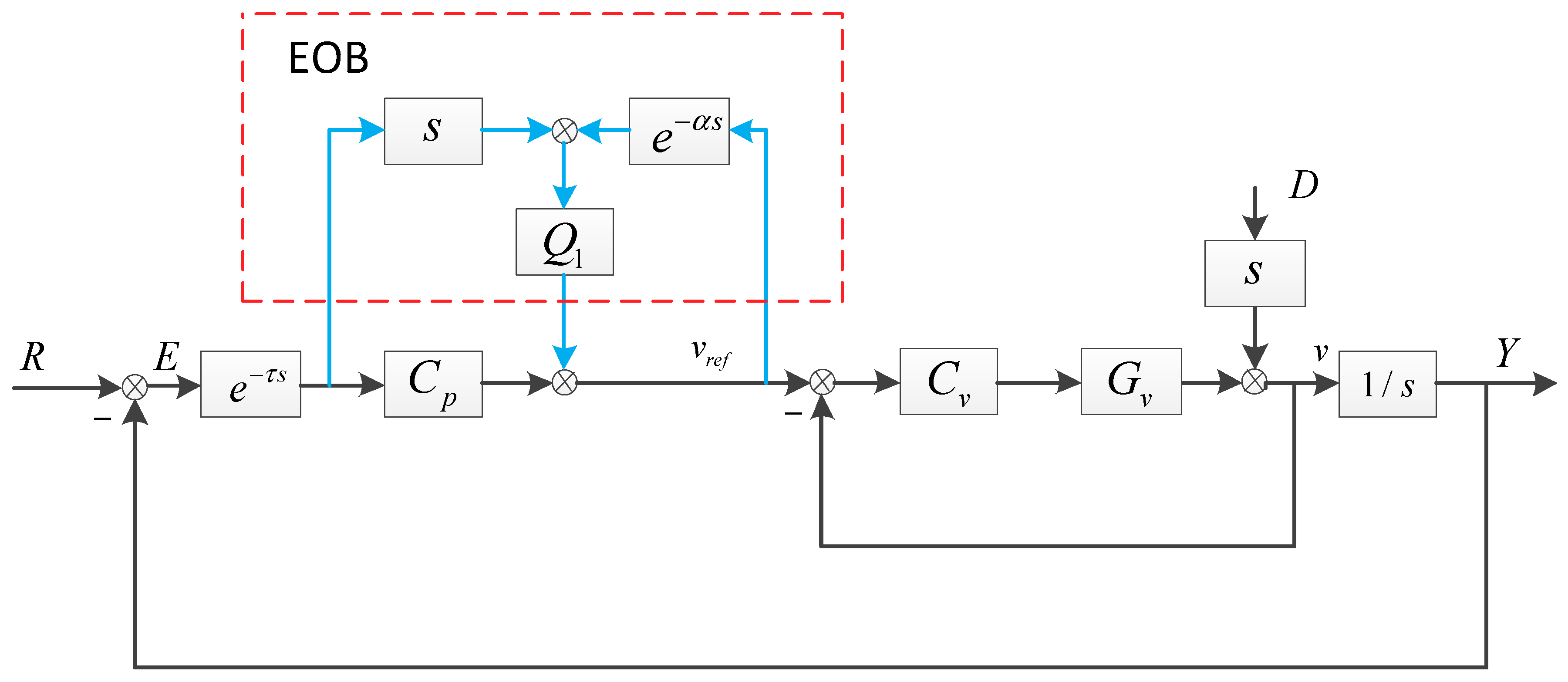
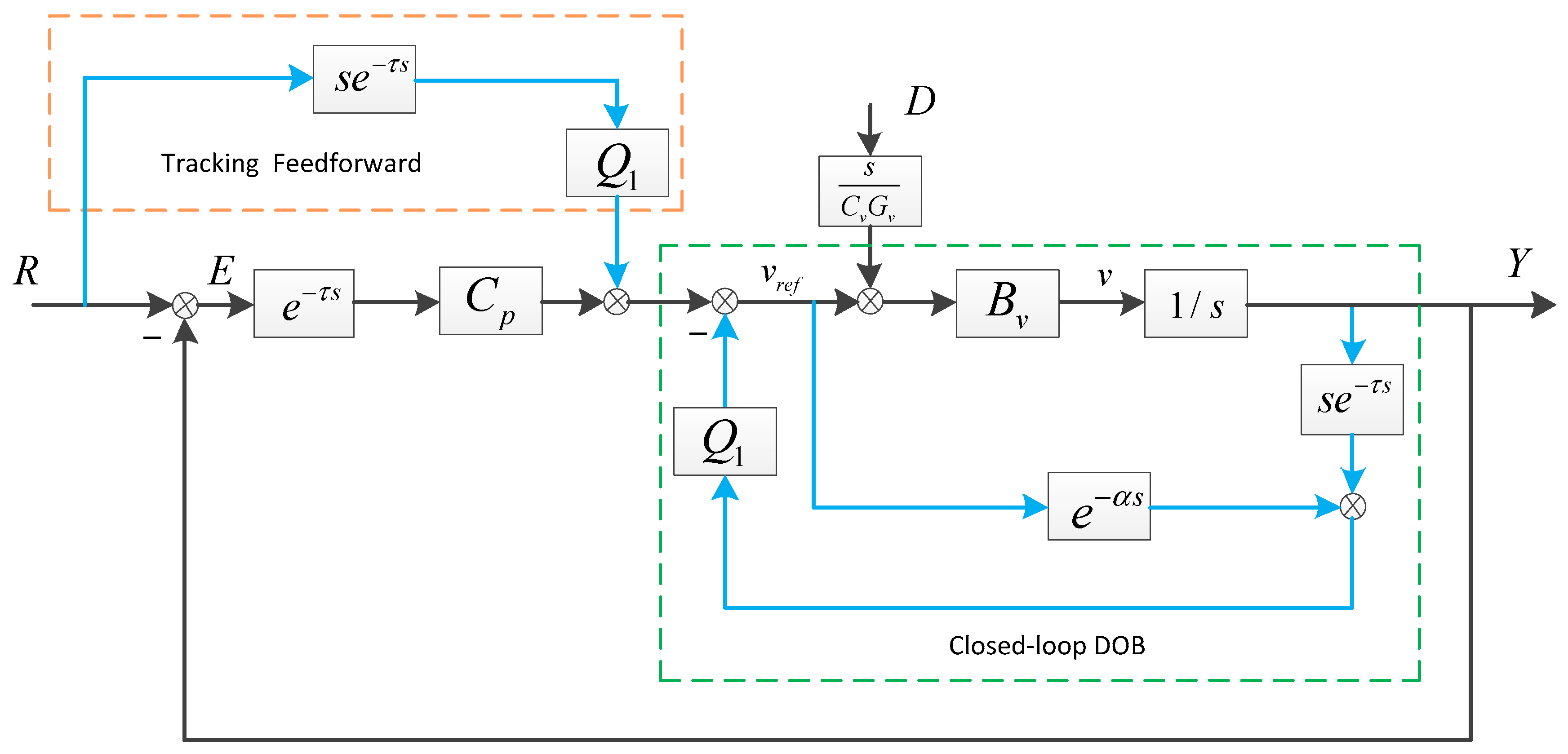
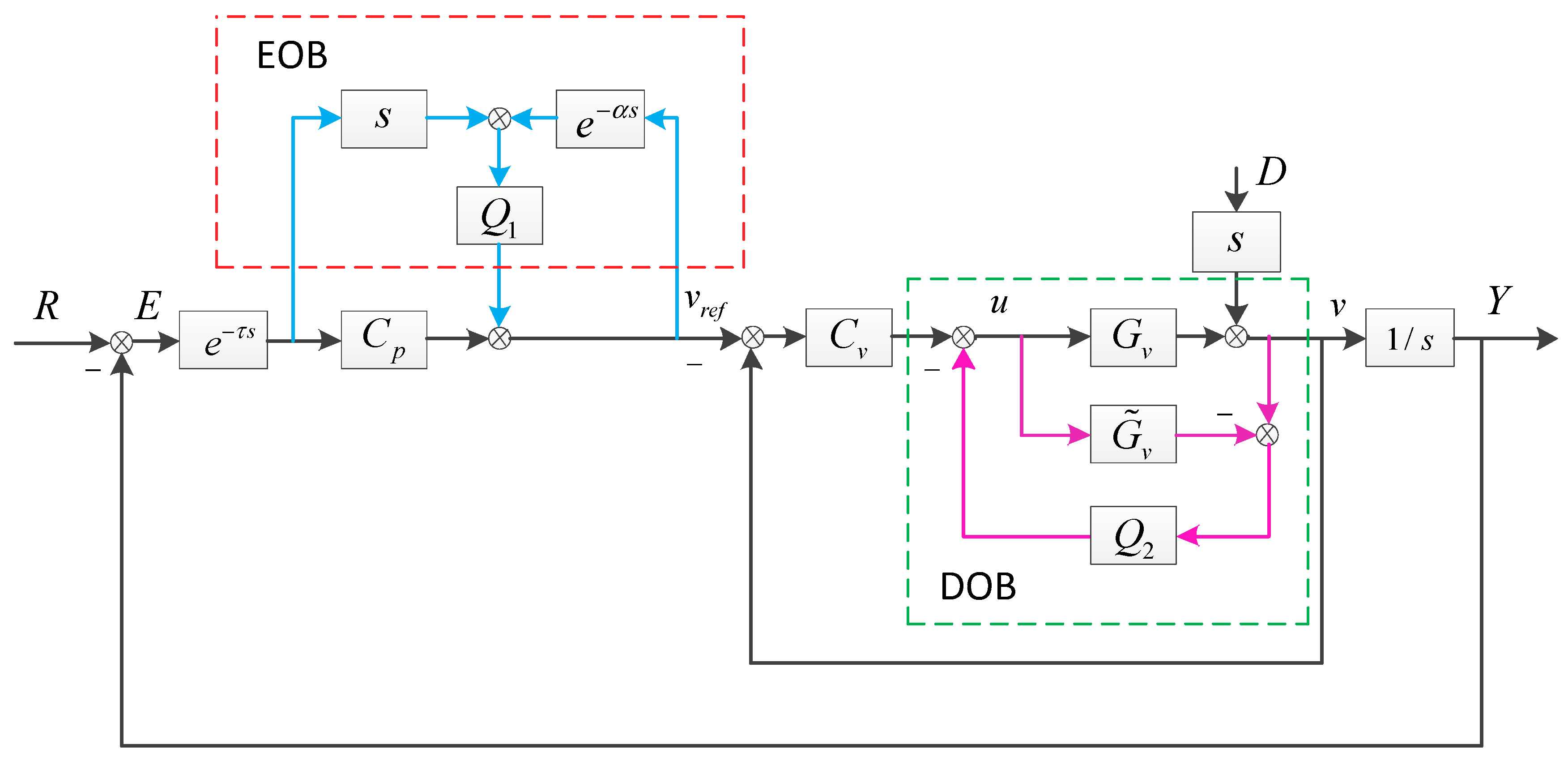
In this paper, an unconventional feedforward control method based on the error and disturbance observation was proposed considering the velocity and position double-loop control (VPDC). The CCD-based error observer (EOB) combined the differential of the boresight error and model output with a delay to generate a composite velocity, which simultaneously contained the delayed signals of the target motion and disturbance. Since the delay had little effect on the very low-frequency signal, the low-frequency items of the composite velocity could be fed forward to the velocity closed loop. The EOB was equivalent to a coalition of the low-frequency tracking and disturbance feedforward. Although the TP improvement was in the low frequency, it was satisfactory because the target motion signal mainly distributed there. Unlike the TP, the ADA improvement only in low frequency brought by EOB was not enough because external disturbances nearly distributed in the full frequency band. Therefore, a FOG-based disturbance observer (DOB) was continuously added to the inner loop to increase the ADA. Unlike the direct disturbance feedforward method, by which additional sensors should be equipped on the pedestal to extract disturbance, DOB could acquire the disturbance through the difference between the data of the existing sensors and the model output [
21,
22]. Since the FOG’s low-frequency signal was weak and susceptible to drift and noise, which resulted in the inaccuracy of the observed low-frequency disturbance, the additional DOB mainly benefited the high-frequency ADA. Hence, the proposed method could make the CCD-based EOB and FOG-based DOB complementary. To verify the effectiveness of the method, a platform consisting of groups of the fast steering mirror system was established, which was the core component of MOTS [
14]. Experiments demonstrated that the proposed system had a good TP in low frequency and a strong ADA in a wide band.
This paper is organized as follows.
Section 2 introduces the physical structure of the MOTS, the basic VPDC method and the common tracking and disturbance feedforward way based on direct measurement.
Section 3 analyzes the proposed feedforward method based on the EOB and DOB, which could provide theoretical derivations.
Section 4.1 discusses the matter of how to design the EOB controller
to maximize the performance of the EOB under the condition of guaranteed gain and phase margin.
Section 4.2 focuses on the design of the DOB controller
and analyzes the promotion of ADA.
Section 5 is the experimental part, indicating the detailed improvement of the TP and ADA by the proposed method.
Section 6 lists the concluding remarks.
2. The CCD-Based MOTS with Traditional Control Methods
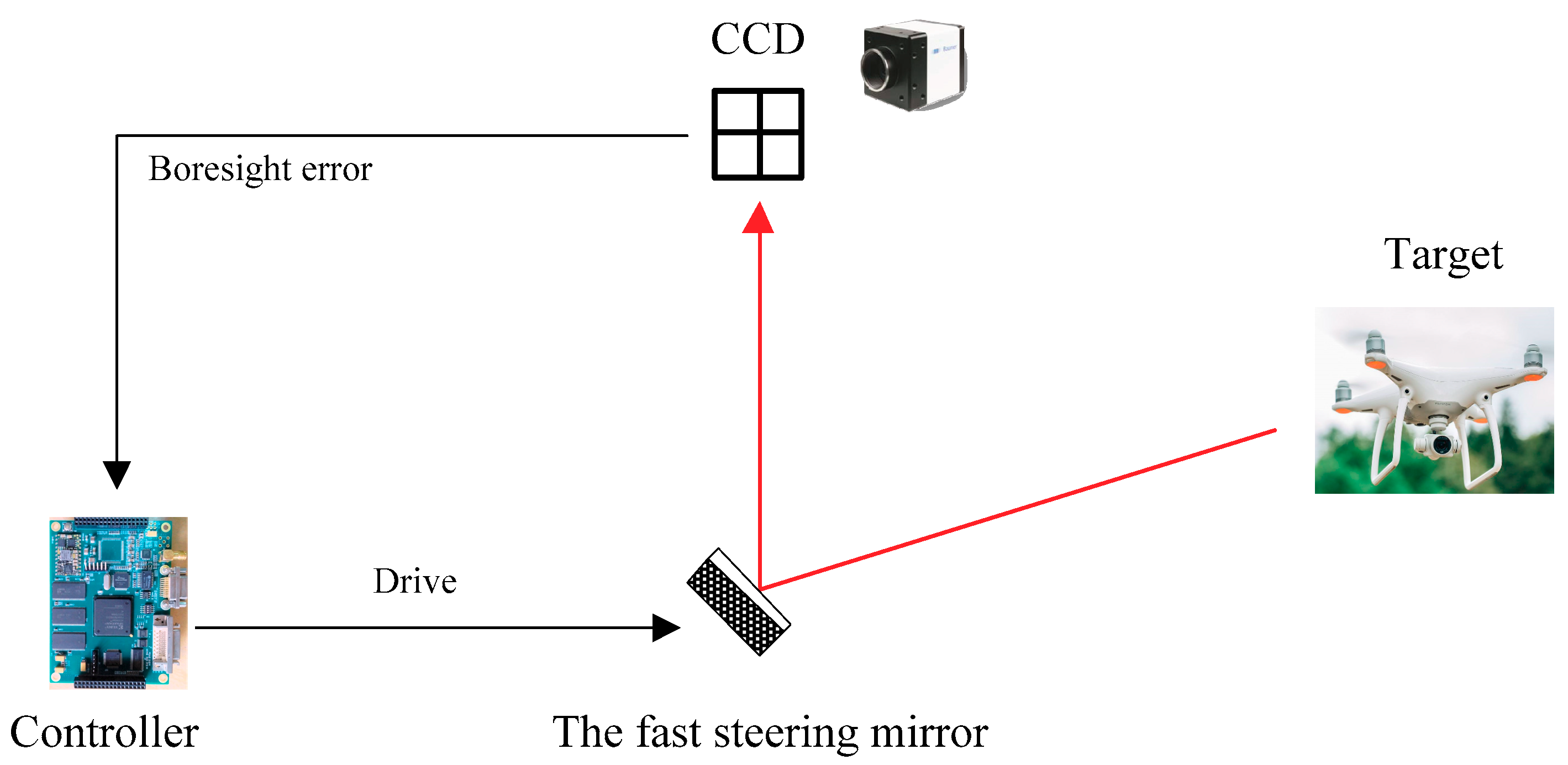
The basic configuration of the MOTS is shown in
Figure 1. The light from the target could pass through the reflective surface of the rotating mirror, which would then be detected by CCD to calculate the boresight error. After receiving the boresight error, the controller would drive the voice motors to make the mirror rotate accordingly, thereby tracking the target and resisting the impact of the external disturbances. To enhance the ADA, a FOG was mounted on the lens barrel to measure the angle velocity. In addition, the velocity closed loop would increase the stiffness of the object and make it easier to control the platform.
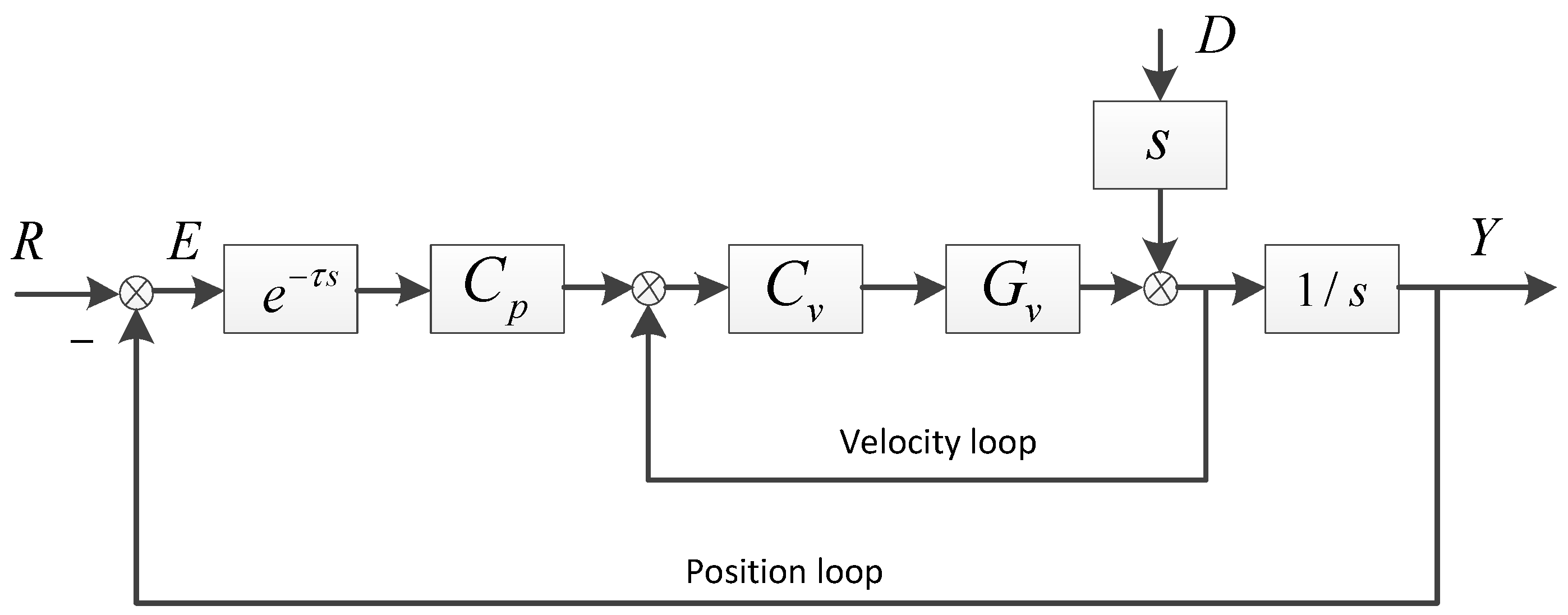
2.1. The Basic VPDC Control Method
In
Figure 2, the basic control structure of the VPDC was presented. The error transfer functions of the tracking and disturbance were respectively
and
, as shown in Equations (1) and (2).
where
in low frequency, because the high-sampling rate velocity loop commonly has a high bandwidth over 100 Hz [
14]. As we all know, the smaller the error transfer function is, the higher the accuracy will be. From Equations (1) and (2), it could be concluded that the TP could be slightly improved by the velocity loop. However, the velocity loop could significantly improve the ADA and the enhanced part is
. Unfortunately, when tracking a high-velocity target with strong external disturbance from the pedestal, the TP and ADA would still be insufficient. If the structure was not modified, we could only increase the gain
and
or add more integral elements to enhance the performance. However, these would decrease the margin and could even make the system unstable. To get a high-precision system under complex conditions, the feedforward branch should be introduced.
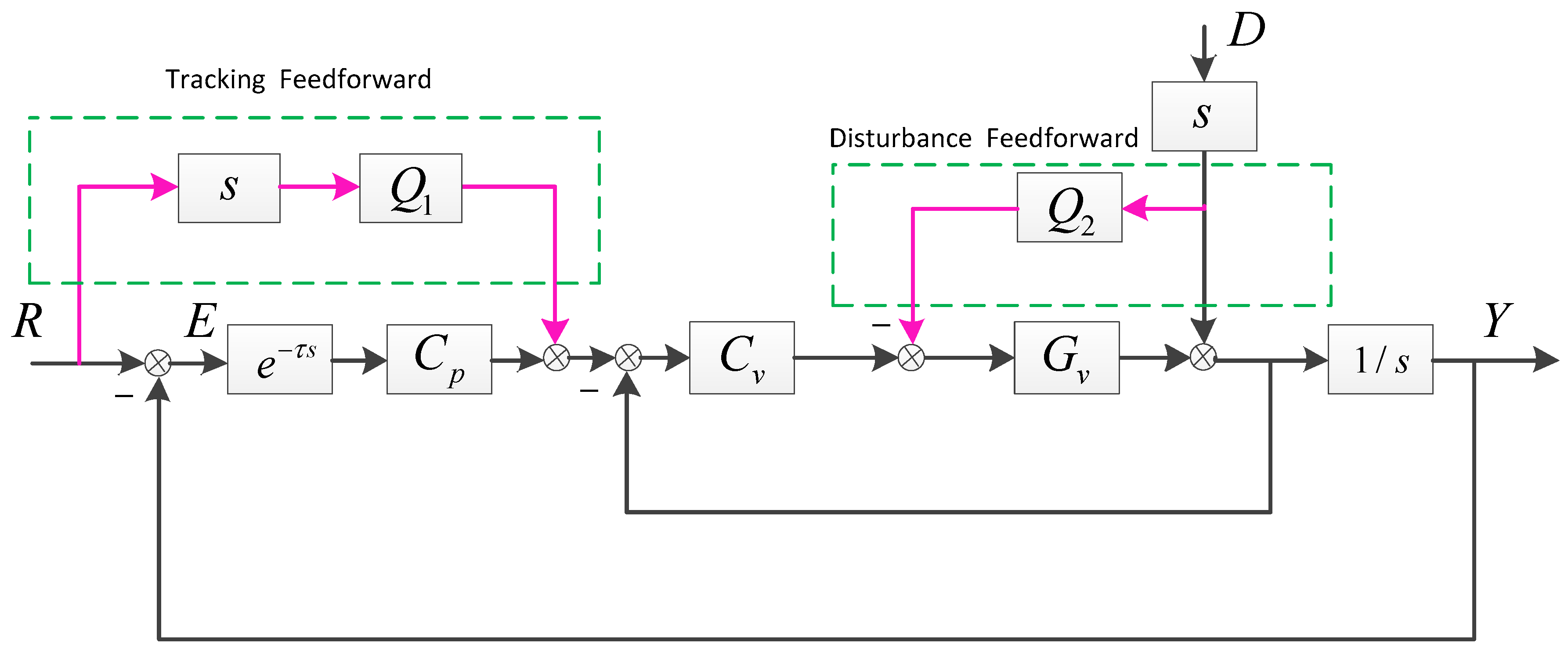
2.2. The Conventional Feedforward Based on Direct Measurement
The feedforward control, as a robust method in industrial control, can effectively decrease the influence of delay and establish a high real-time and high-precision system. The VPDC-based direct feedforward structure is shown below (
Figure 3).
The error transfer functions are as follows.
Compared to Equations (1) and (2), if and are designed properly, the error could be reduced to 0, theoretically. However, in fact, the pure feedforward control is a kind of open-loop control highly relying on the object model. Since the mathematical model could only be built accurately at low and middle frequencies, the promotion mainly concentrated in these bands. In addition, it was difficult to get signals of the target movement and disturbance. Firstly, there is no sensor that could directly detect the motion state of the target. If the sensors’ fusion method is adopted to predict the target trajectory, an additional sensor should be used to measure the position of the platform. The prediction method requires lots of computation and is only suitable for low noise environments. Secondly, in order to extract the external disturbance from the pedestal, additional sensors are also required. Moreover, it is difficult to identify the disturbance source and more auxiliary equipments are required. Therefore, the feedforward based on direct measurement is also inappropriate in engineering.
5. Experimental Verification
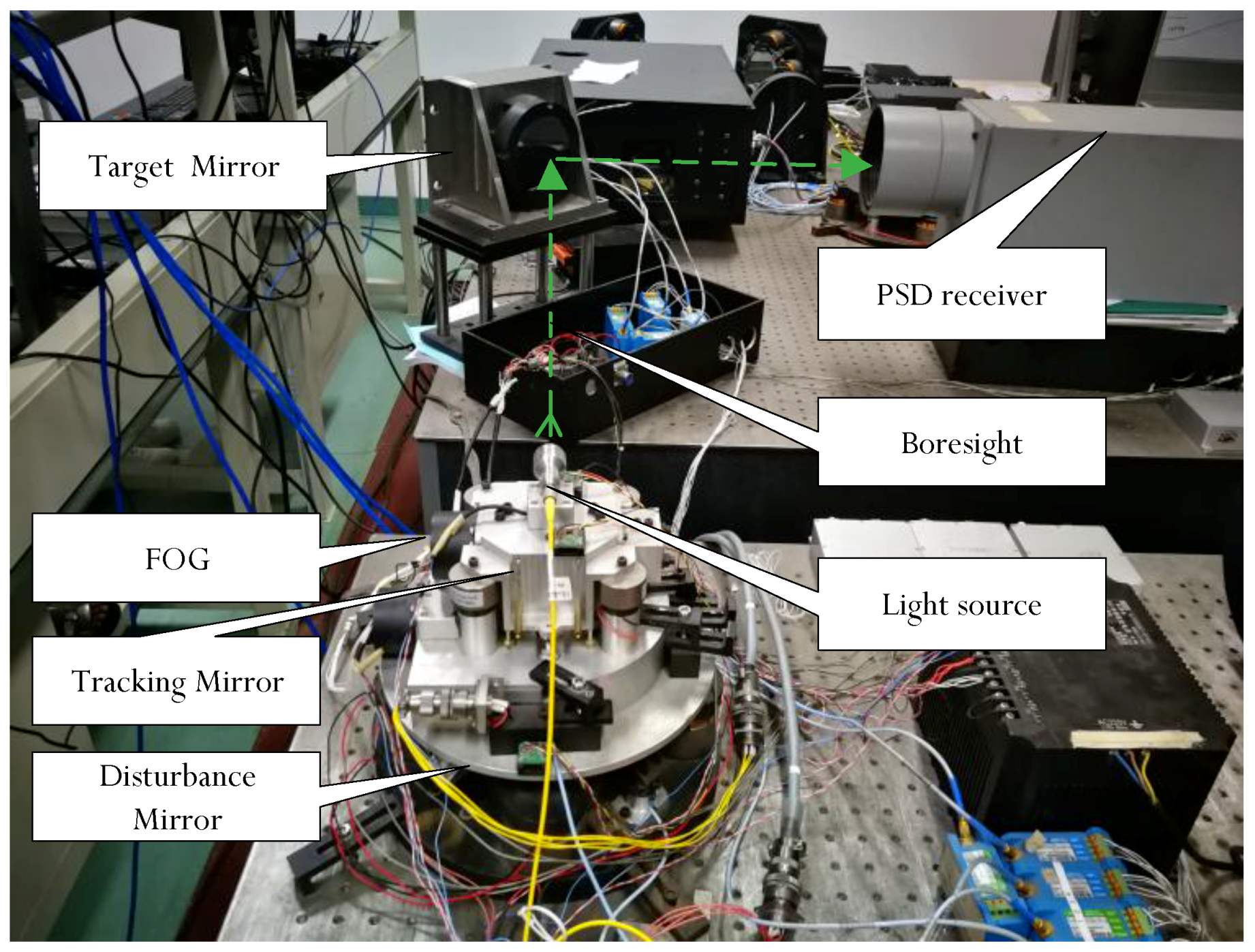
The experimental setup was presented in
Figure 9, which involved three fast steering mirror systems used in the disturbance isolation table. One was the controlled object named Tracking Mirror, one was Target Mirror for simulating target motion, and one was Disturbance Mirror for simulating external disturbances. The Tracking Mirror was fixed above the Disturbance Mirror. Since the fast steering mirror was a symmetrical two-axis system, we only need to pay attention to single-axis motion. The laser could emit light as a visual axis reference. Then, the light could be reflected by the Target Mirror and entered into the phase sensitive demodulator (PSD), a substitute for CCD. We could control the motion of Target Mirror and Disturbance Mirror to simulate the target’s motion and the external interference. The controller could receive the boresight error from PSD and the platform’s velocity detected by a FOG, to stabilize the boresight. The PSD could run in at the sampling rate of 100 Hz with an artificially added delay to imitate the CCD. The FOG could run at the rate of 5000 Hz.
Before designing the closed-loop controller, the model of the platform should be acquired with a spectrum fitting method. In order to identify the parameters in Equation (19), the driver should output a sinusoidal signal of varying frequency to actuate the Tracking FSM. Then the FOG would be used to detect the motion state; comparing the output to the input, the open-loop bode response of the velocity can be drawn with the blue line, as shown in
Figure 10. Finally, the parameters were adjusted to make the red curve of the model coincide with the blue one, and a high-precision transfer function could be acquired, as shown in Equation (24).
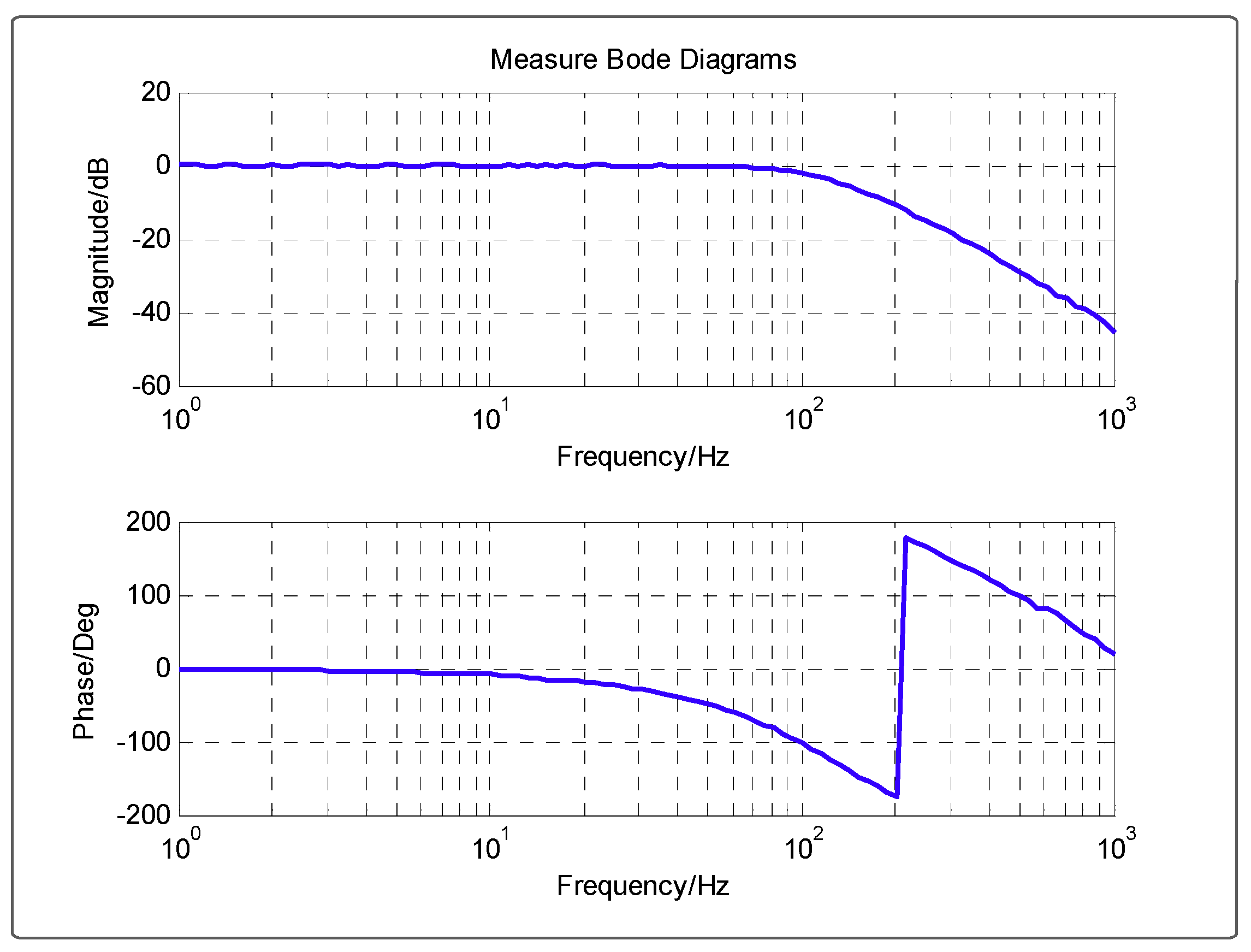
The closed-loop bode response of the velocity was exhibited in
Figure 11, in which the bandwidth passed 100 Hz, and the resonance peak of the open-loop velocity model under 7 Hz was eliminated, benefiting the controller design of the outer position loop. Below 10 Hz, the amplitude was close to 0 dB and the phase loss was less than
, which indicated that the closed-loop transfer function could be regarded as 1 in this low frequency band. Therefore, it was enough to take a proportional link as the position controller.
5.1. The Improvement of the TP with EOB
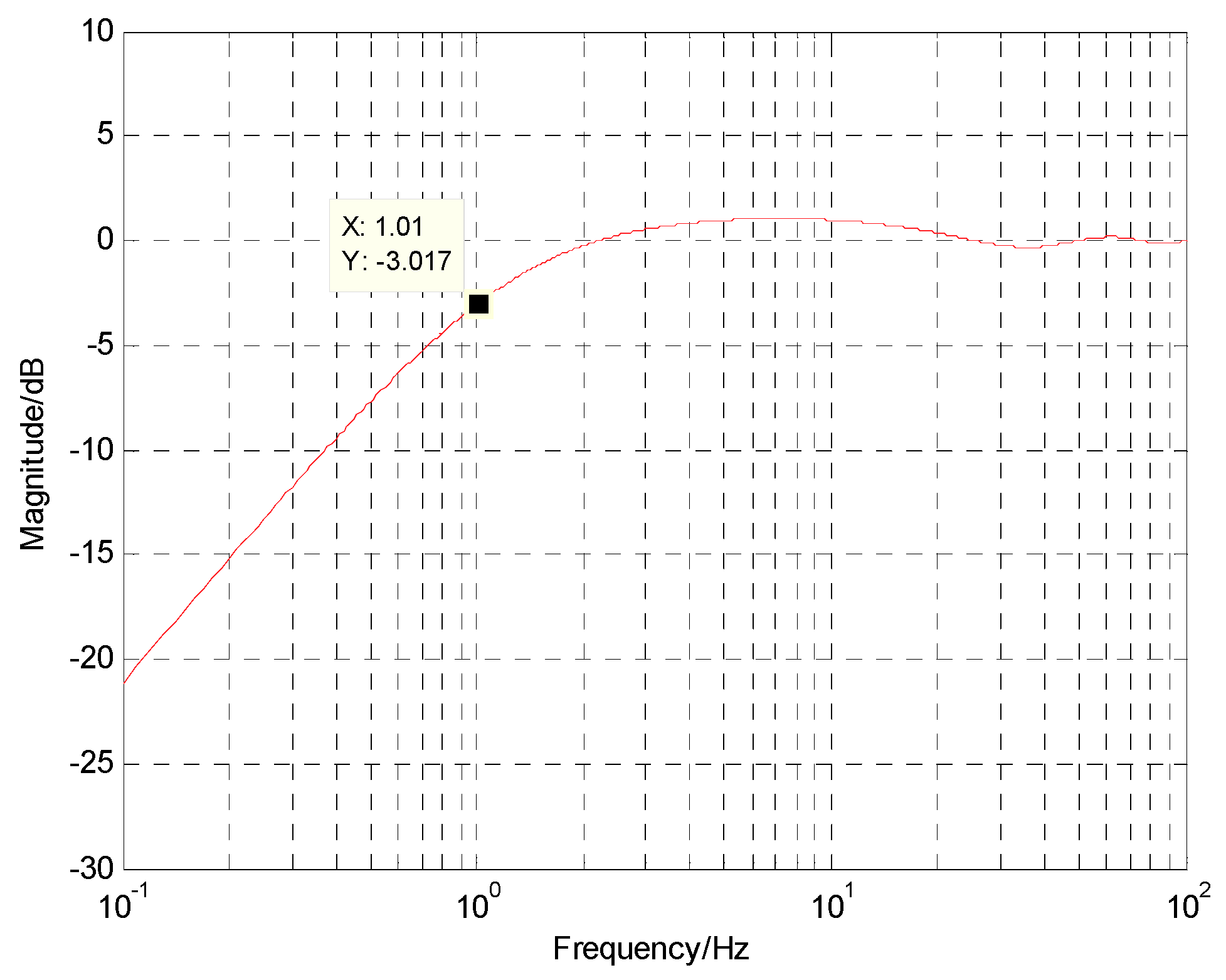
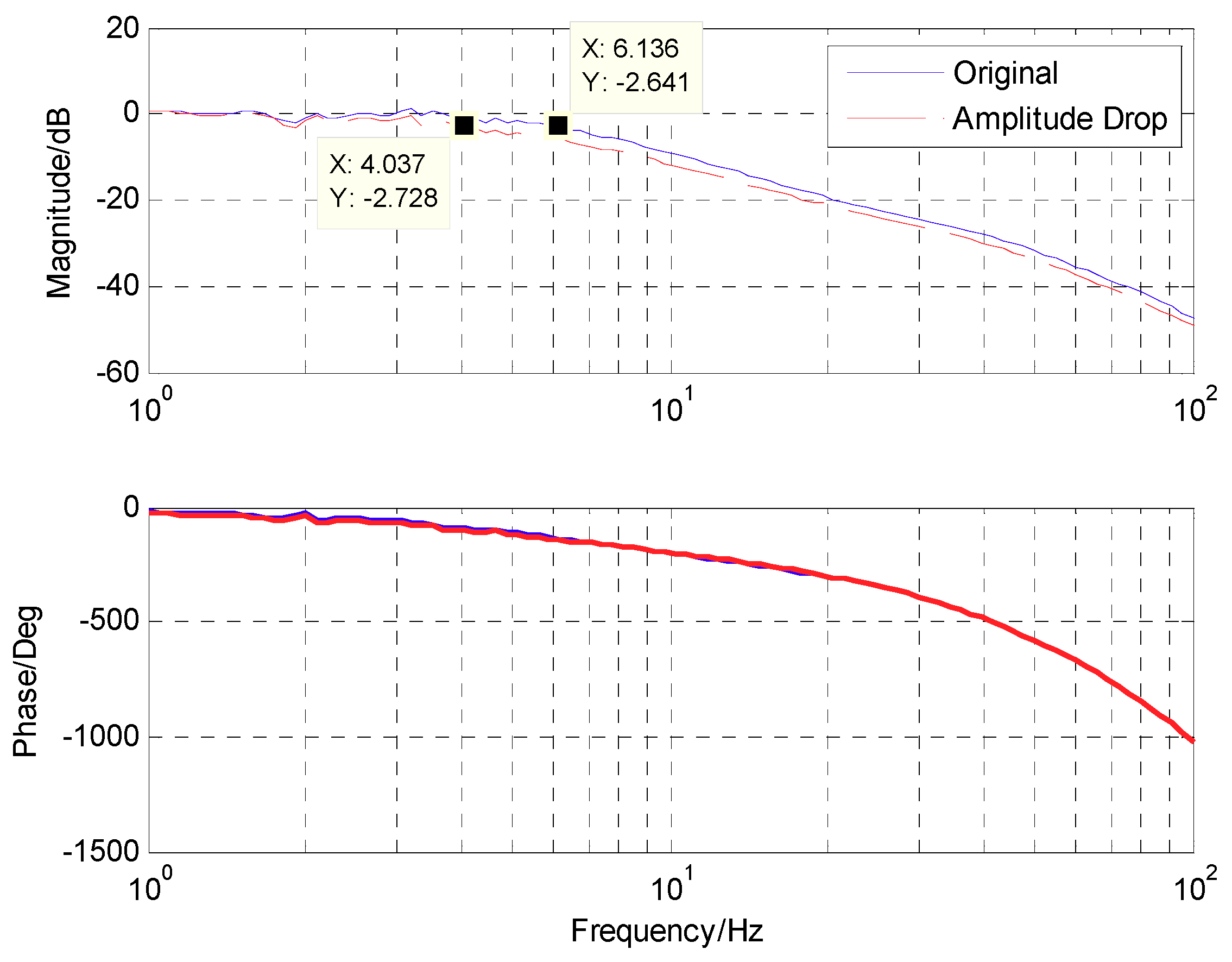
In
Figure 12, the closed-loop bode responses of the position with or without EOB were described. When the EOB was introduced, the amplitude of the position controller should drop a little to guarantee enough margins. Although the bandwidth of the system with EOB was decreased by about 2 Hz, it would make no difference, because the performance below 1 Hz was adopted for tracking.
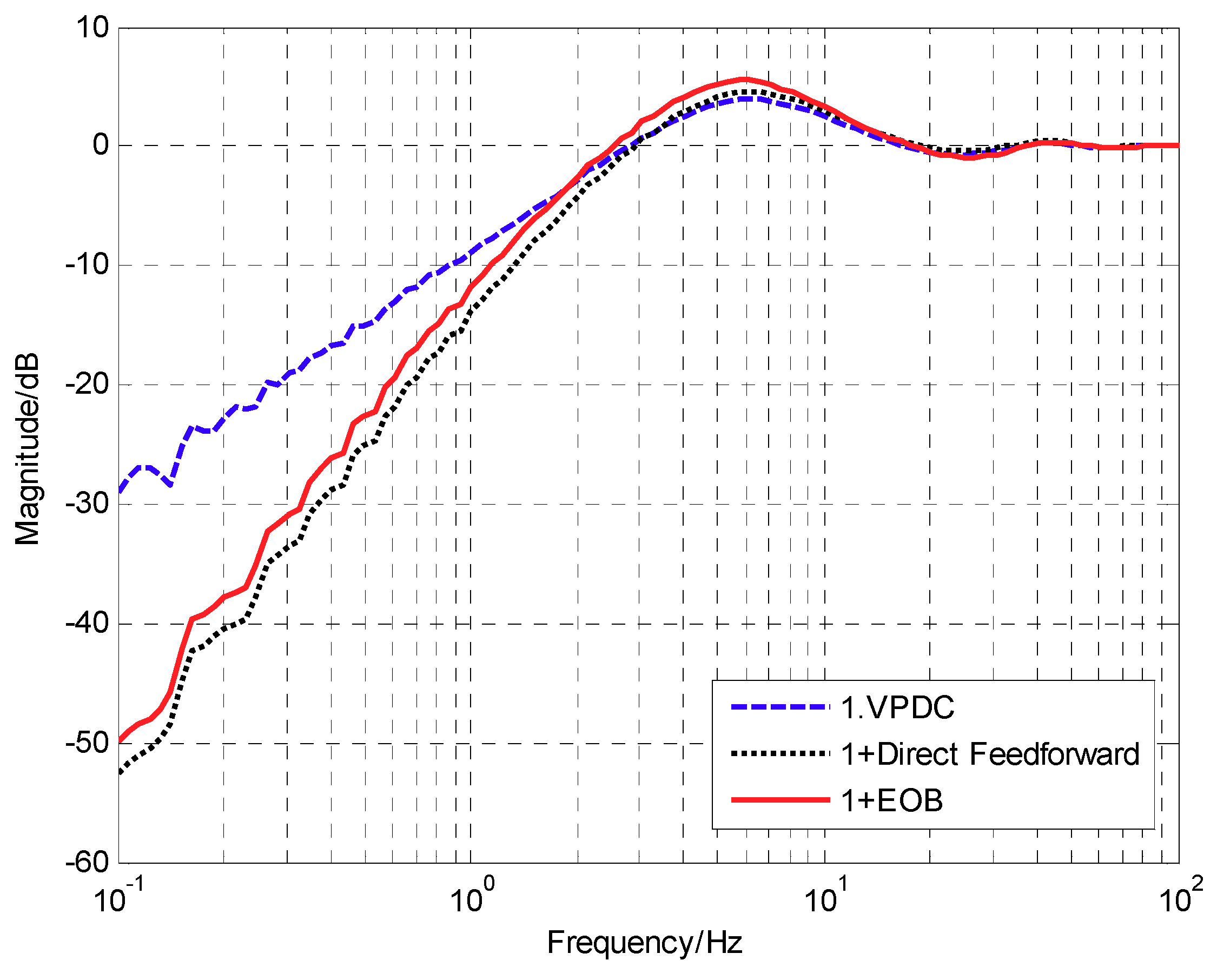
The error suppression bode response of the MTOS was presented in
Figure 13, which only provided the target signal. Three methods were listed overall, the basic VPDC method, the direct feedforward method and the EBO method based on the VPDC. Obviously, the direct feedforward method based on sensors fusion with the predictive way had the best error suppression performance. However, the performance of the EBO method was close to the direct feedforward, which signified that the previous analysis was right and the proposed way was approximately equivalent to the direct feedforward method. Moreover, compared with the direct feedforward, the EBO method did not need an additional position sensor to measure the angular of the platform and cost a smaller amount of computation. Below 2 Hz, the system with EOB would have a better ability of error suppression than the pure VPDC without EOB; actually, it would be valid for both tracking and anti-disturbance. With the decrease of the frequency, the promotion of ability would be more apparent and could even reach −20 dB under 0.1 Hz. In the frequency band between 2 Hz and 18 Hz, the performance of the pure VPDC was a little better than the system with EBO, as shown in
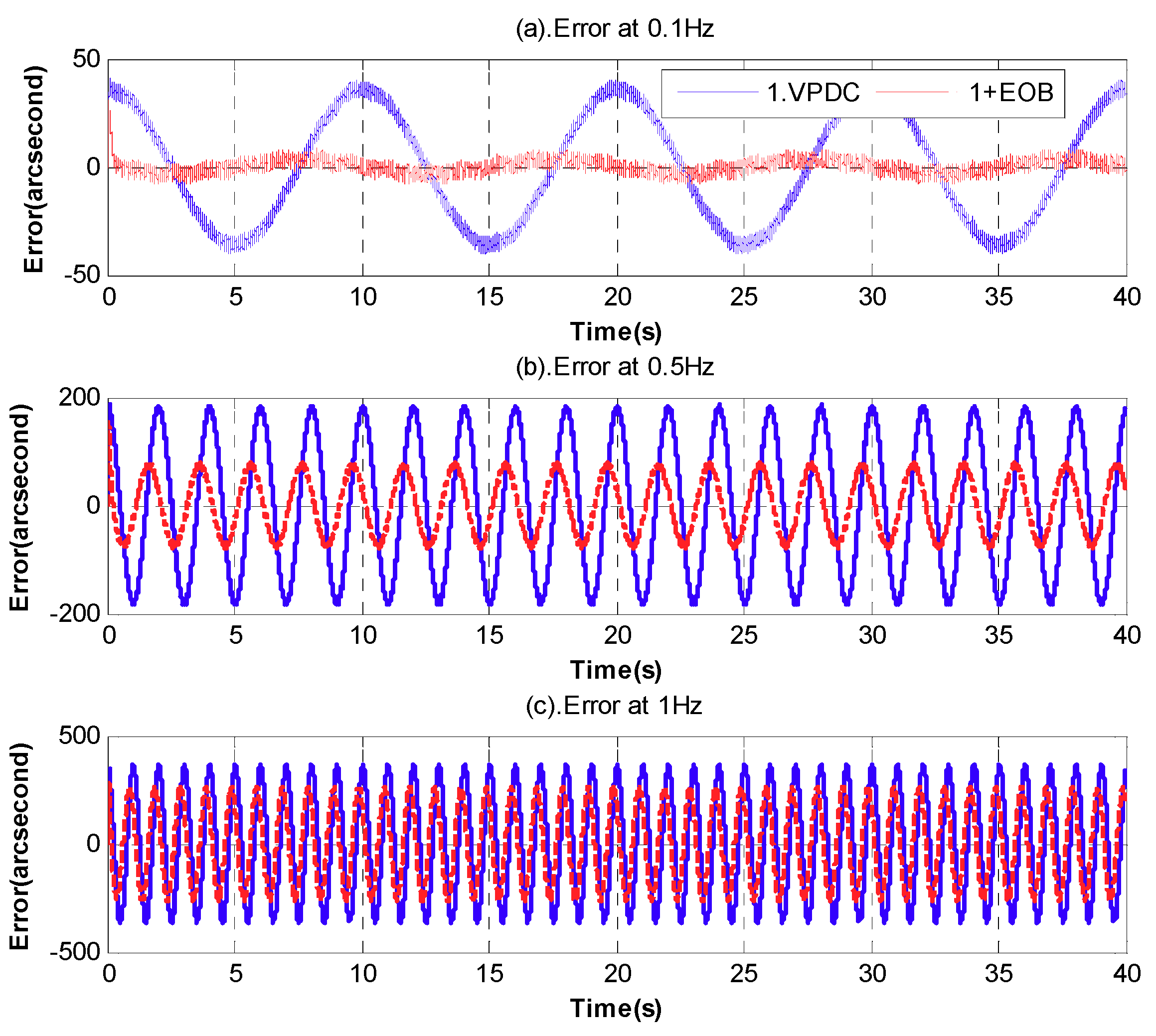
Figure 7, and the performance could be accepted. In
Figure 14, the time-domain residual error was presented with the given target signal of different frequencies. In the frequency domain below 1 Hz, the EBO can make a big difference.
5.2. The Improvement of the ADA with the Combination of EOB and DOB
According to Equation (22), the DOB controller
is not the ideal value and a concession should be made. Parameter b can determine the starting point of disturbance compensation. Considering that the used FOG in this experiment had a poor performance below about 1 Hz, the actually used
was set as Equation (25) and all the parameters of controllers were listed in
Table 1.
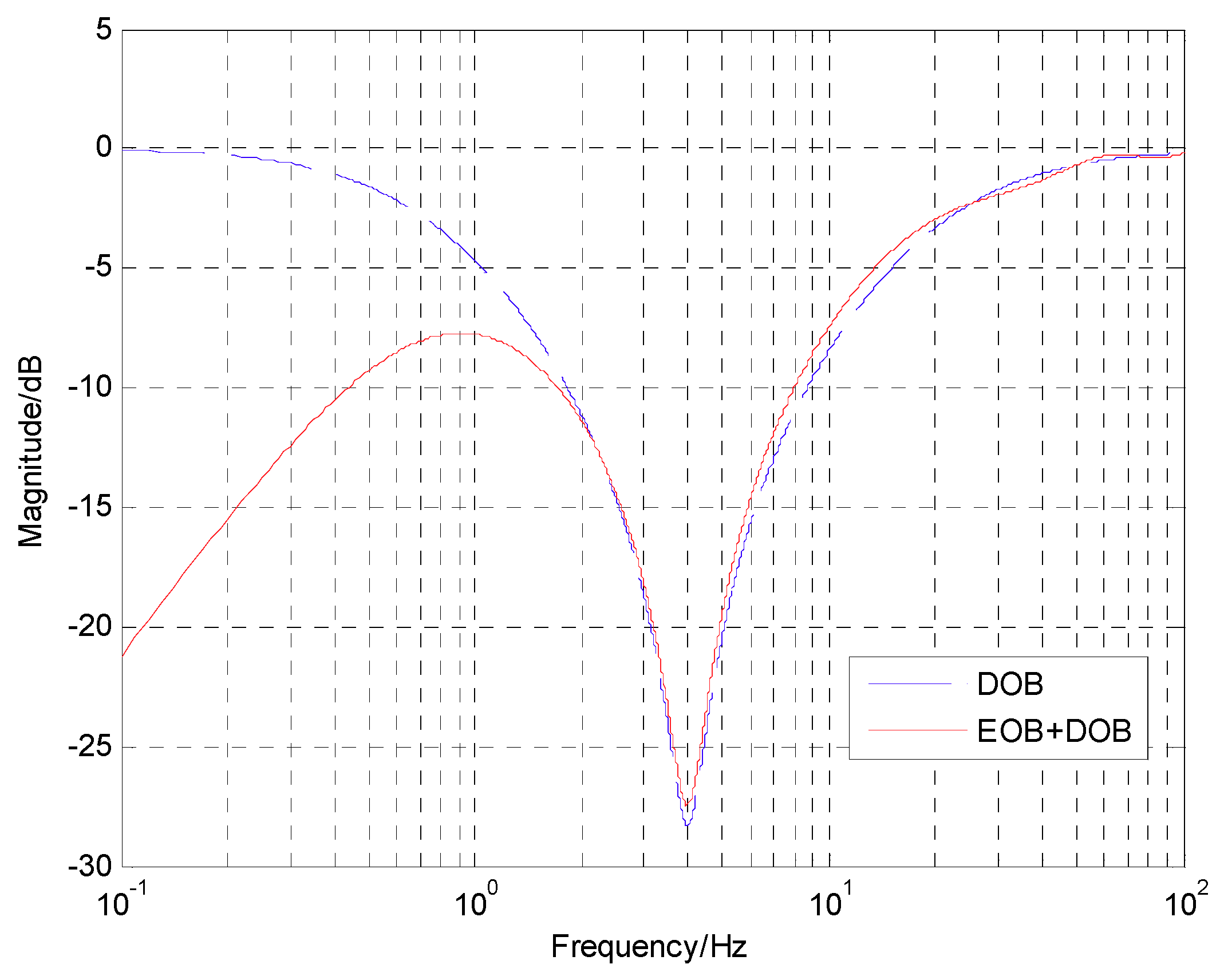
The disturbance suppression bode response is presented in
Figure 15, which involved four situations in all, showing the pure VPDC structure and the various combinations of EOB and DOB based on VPDC; the VPDC without any feedforward had a relatively poor ADA, especially in the middle frequency domain of about 5 Hz, which approached 0 dB. The EOB has apparently promoted the ADA of the low frequency below 1 Hz, sometimes (for example, on a ship) there would be a shake of carrier with a strong amplitude. The reason why the promotion was restricted at the frequency of 0.1 Hz was that the performance of the system almost reached the limitation under this noise condition. The DOB mainly worked at the medium frequency, where there was a maximum increase of −20 dB, because the measured signals and the reference model were relatively more accurate in this band. With the simultaneous help of EOB and DOB, the ADA had an improvement (at least −10 dB) in both the low and medium frequencies, which means that the system’s precision would nearly be increased by an order of magnitude. The proposed method could not enhance the very high-frequency ADA, which mainly depended on the mechanical design.
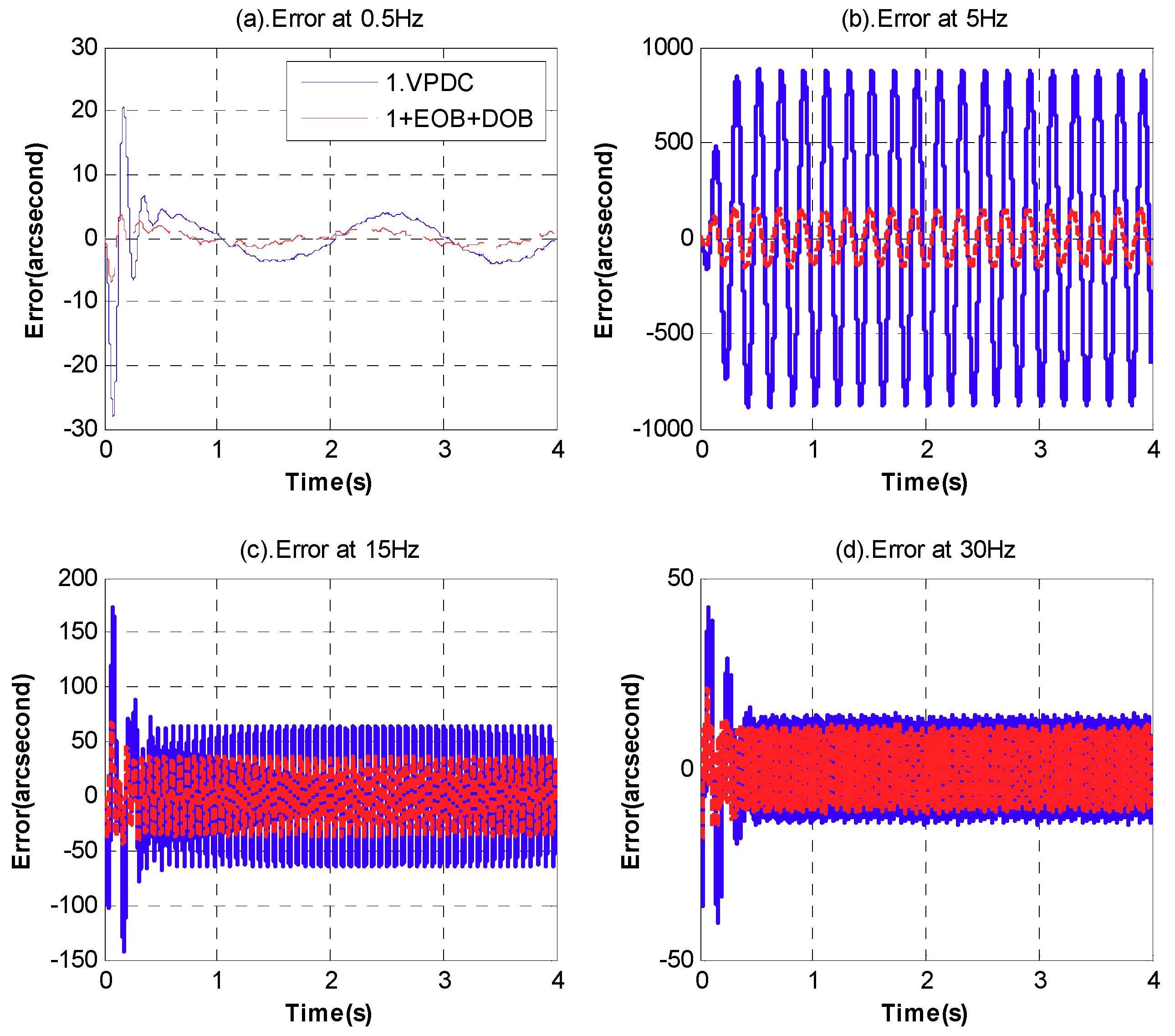
Figure 16 shows the time-domain residual error with a given disturbance signal of different frequencies. Obviously, with the proposed way, the residual error was reduced below 30 Hz.
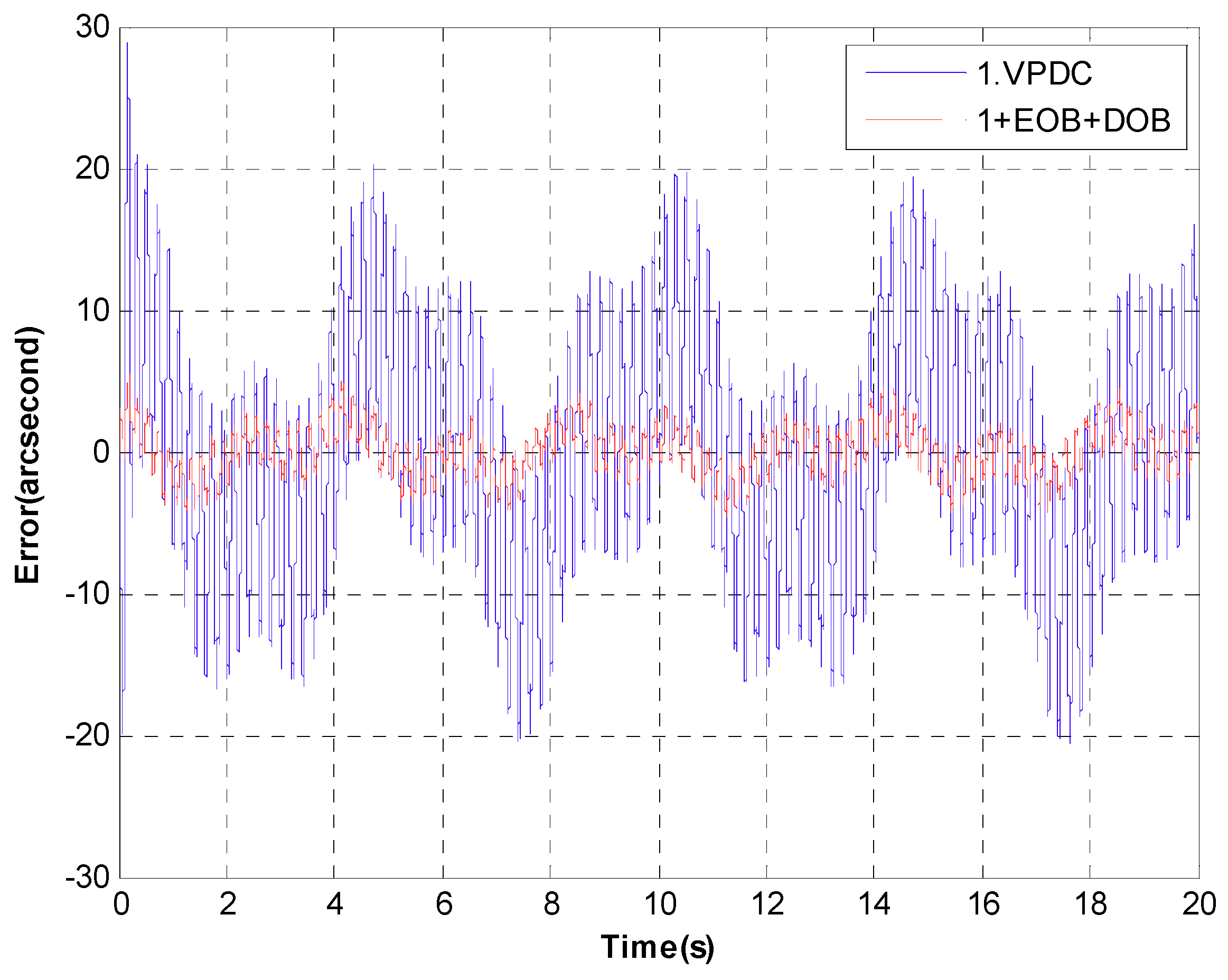
In order to verify the level of accuracy under the actual engineering conditions, we should detect the residual errors when simultaneously giving the target signal and disturbances to the system. In
Figure 17, the results were presented and there was huge promotion. The target signal was 0.28° 0.2 Hz and the disturbances consisted of 0.28° 0.5 Hz, 0.0028° 5 Hz and 0.028° 50 Hz. The RMS error of the pure VPDC was 8.6504″ and the RMS error with additional EOB and DOB was 1.8111″, signifying that the proposed way of observation was valid.

 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}