1. Introduction
For decades, silicon transistors have dominated the power amplifiers industry due to the low-cost and well-established fabrication technology. Since the transistors in a linear power amplifier operate in the active region where power dissipation is significant, thereby they experience poor efficiency. In addition to advanced fabrication techniques like laterally diffused metal oxide semiconductor (LDMOS) [
1,
2], different control strategies such as Doherty’s architecture and load-modulation were adopted to improve the efficiency of a linear amplifier [
3]. Due to a narrow margin for improvement left in Si, the demand for high operating voltage, temperature and efficiency has enabled the trend towards wide band-gap (WBG) materials. The attractive features such as a high electric breakdown field, low thermal impedance, and saturated electron drift velocity, motivated their rapid substitution for Si counterparts [
4]. Particularly, GaN high electron mobility transistor (HEMT) has become a potential candidate for large bandwidth and low-noise power amplifiers [
5].
The earlier release of high-power GaN HEMT was a depletion-mode device also referred to as normally-on FET [
6]. Since it requires additional control and protection circuitry for a safe power-up of power converters built with normally-on FETs, therefore, enhancement-mode FETs are preferred over depletion-type devices. There were several attempts made to fabricate a normally-off GaN HEMT, including a recessed gate structure [
7], Si substrate with p-type GaN [
8], and fluorine plasma treatment [
9]. However, due to a low threshold and gate breakdown voltages, the proposed HEMTs are vulnerable to spurious turn-on and gate failure. Alternatively, to achieve a normally-off GaN HEMT, a cascode configuration has been proposed by combining the GaN HEMT with a low-voltage Si metal oxide semiconductor field effect transistor (MOSFET) [
10]. Due to the low-cost leaded packages and superior characteristics, GaN cascode is a dominating power device and is preferred over the enhancement-mode HEMTs [
11]. They are commonly available in TO-220 package, which enables easy assembling of the heat-sink and does not need special equipment for soldering to printed circuit board (PCB).
The class-D amplifier motivated by its high-efficiency (ideally 100%) encodes the reference signal into a pulse-width modulation output using a switching power circuit, with pulse-width proportional to the amplitude of the reference signal [
12]. Since the operation of active devices in either the cutoff or saturation region significantly reduces the power dissipation, therefore, the heat sink requirement relaxes. In the case of battery-powered devices, high efficiency means longer battery life. Thus, class-D amplifier is the ideal choice for miniaturized high-power amplification as compared to the class-A, class-B and class-AB. Today, in addition to the stereo system, class-D amplifiers are also used in a high-precision control application, including the wafer positioning system, magnetic resonance imaging (MRI), and power hardware-in-loop simulation (PHIL) [
13,
14].
An LC filter demodulates the output pulse-train by attenuating high-frequency content and produces the amplified output with minimum distortion. More LC stages are commonly added at the output of a class-D amplifier to meet the desired level of THD at a given switching frequency [
15]. Low THD amplifier with high-power capability has applications in AC power sources and is used for the emulation of certain characteristics of an electrical system. However, the higher-order class-D amplifier causes an irregular-shaped frequency response due to multiple resonant frequencies in the uncompensated architecture [
16]. Furthermore, the peaking at resonant frequency increases with an increase in load resistance and approaches zero-damping under the no-load condition. Therefore, it is required to have well-damped characteristics of a higher-order class-D amplifier, almost independent of load variations.
The feedback compensation of a class-D amplifier with a single LC stage is extensively investigated in the literature [
17,
18]. However, for the fourth-order system, the reported passive damping uses a low-valued resistor in series with filter capacitors to flatten the frequency response, at the cost of reduced efficiency [
19]. Feedback controller supplemented with passive damping was adopted in Reference [
20], which results in relatively lower power losses. In addition to an RL-branch between the capacitive filter of the first and inductive filter of the second LC stage, authors in Reference [
21] proposed a multi-loop controller. Employment of such networks degrades the efficiency, which is the sole advantage of the class-D amplifier. Since passive damping negatively affects the efficiency of the amplifier, the application of high-cost GaN cascode becomes vestigial.
A purely feedback-controlled fourth-order class-D amplifier presented in Reference [
22], achieved a peak efficiency of 87%. However, the controller was extremely complex as it requires feedback from all four state-variables. Feedback compensation using an integral sliding-mode (ISM) controller of the fourth-order class-D amplifier has been recently reported in Reference [
23]. Nevertheless, it is inhibited for use due to the variable switching frequency nature of hysteretic modulation (HM) [
24,
25]. Therefore, a promising feedback controller with pulse-width modulation (PWM) is required, which ensures fixed switching frequency, flatter frequency response, reduced tracking error and a high-efficiency.
Since the equivalent control of a fixed-frequency sliding-mode controller is extracted from the sliding-surface by a differentiation operation [
26]. Therefore, it is obvious to add a double integral term in the sliding-surface essential for ensuring reduced steady-state error [
27,
28]. However, the design of the sliding-surface becomes more challenging and would require tedious manipulations while deriving the equivalent control [
29,
30]. Moreover, due to a number of feedback signals, the resulting controller may not be practical. Thus, the FFDISM is proposed here, with two different control structures based on sliding-surfaces: One uses the inductor current while the other utilizes the capacitor current feedback to flatten the frequency response. The controller that offers high efficiency and realization using reduced opamp count is implemented for experimental verification.
The rest of this paper is organized as follows:
Section 2 presents the mathematical model of the fourth-order class-D amplifier, which is an essential step for filter and controller design.
Section 3 focuses on the derivation of the equivalent control for the two controllers where one uses the inductor current while the other involves the capacitor current feedback. In
Section 4, the circuit realization of the proposed controllers is discussed. Simulation and experimental results are given in
Section 5, followed by conclusion in
Section 6.
2. Modeling of Fourth-Order Class-D Amplifier
The role of the second LC stage is to improve the THD by reducing the residuals of switching harmonics [
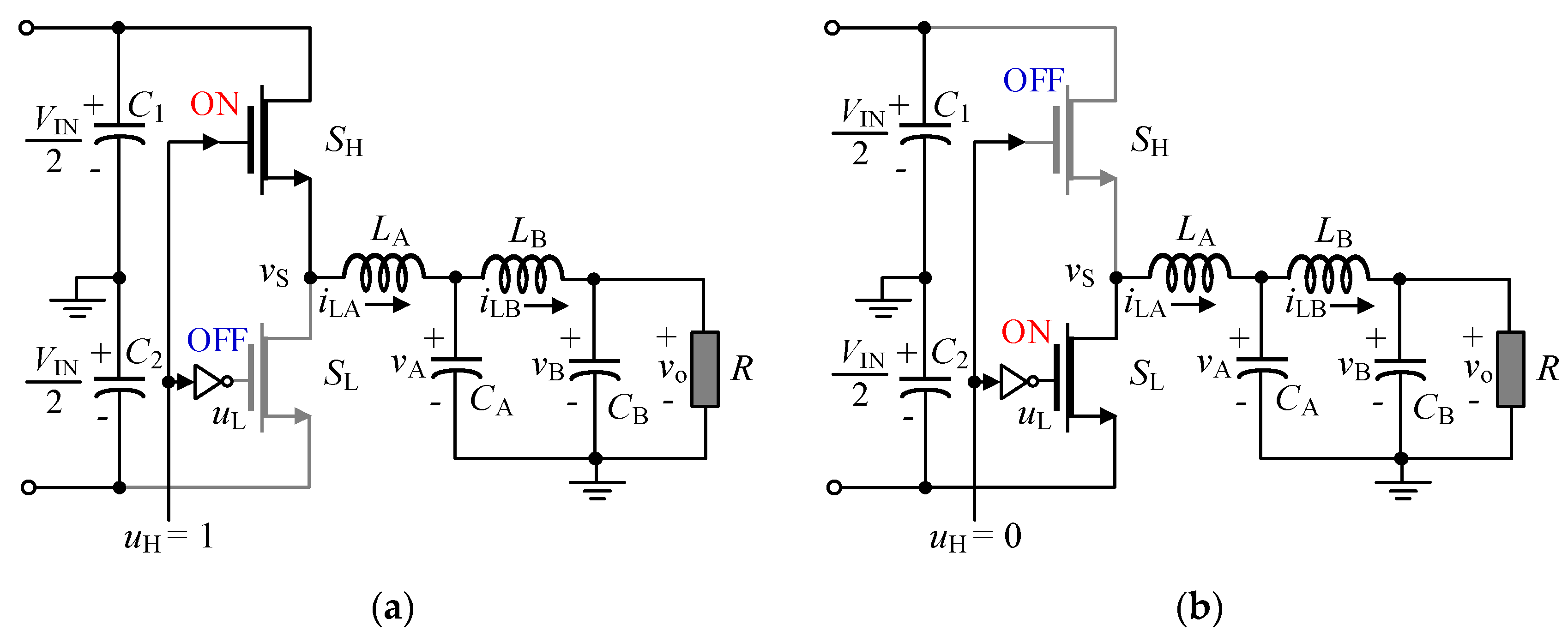
31]. It is important to investigate the effect of the additional LC stage on frequency response using average modeling, in order to ease the controller design process. Modeling of the power stage presented here neglects the non-idealities such as the forward voltage drop in the diode, conduction resistance of MOSFET and dead-time delay.
Figure 1a,b shows the equivalent circuits during the two class-D operation modes determined by the control signals, i.e.,
uH and
uL. These switching signals can attain the binary values; 1 and 0 for the on and off state of MOSFET respectively. For
uH = 1, the low-side GaN cascode
SL is in the off-state while the high-side
SH is in the conduction state, and the voltage
vs clamps to
VIN/2 as shown in
Figure 1a. Similarly, for
uH = 0, voltage
vs clamps to −
VIN/2 as shown in
Figure 1b. The dynamic equations of the converter for each switching state are expressed as
The subscript “
A” and “
B” depict parameters of the first and second LC stage. Thus,
LA,
iLA, and
vA are the inductance of the first LC stage, the current through
LA, and the voltage across
CA respectively.
VIN is the source, and
vo is the output voltage. The average-model of the class-D amplifier, by combining (1) using duty cycle
dH = avg(
uH) is expressed as
where
LB,
iLB, and
vB are the inductance of the second LC stage, the current through
LB, and the voltage across
CB, respectively, and the load resistance is denoted by
R. The dynamics of the class-D amplifier may also be written in state-space form as
where
x is the state vector, and
f and
g are functions of the state vector explicitly given in (4).
The open-loop transfer function from
vS to output voltage
vo can be deduced from (4) as:
Figure 2 shows the frequency response of the fourth-order class-D amplifier in an open-loop configuration. Using the filter values set (i) in
Table 1 results in resonant frequencies at 14 kHz and 51 kHz, as shown in
Figure 2a. The two frequencies are somewhat close to each other as the relations between the inductances and capacitances of the two stages are
LA = 2
LB and
CB = 2
CA respectively. The frequency response is repeated in
Figure 2b using the filter values from the set (ii) in
Table 1, resulting in resonant frequencies at 14 kHz and 114 kHz. It indicates that the first resonant frequency is independent of
LB and merely depends on
LA,
CA, and
CB. Moreover, the separation between the two frequencies determines the damping of the second resonance. The second frequency can be displaced adequately by using an appropriate integer multiplier
n ≥ 2 such that
LA = n
LB [
9]. It is also noted that the resonant peaking increases with the load resistance and approaches zero-damping under a no-load condition.
To improve the frequency response of fourth-order GaN class-D amplifier, the FFDISM controller is proposed. Two different sliding-surfaces are proposed; each includes an extra current term (either inductor or capacitor current of the first LC stage) in addition to voltage error in the state variables. The coefficients of the sliding-surfaces are determined using the stability condition. The controller using capacitor current is compared to the controller with an inductor current in terms of high-efficiency and ease of implementation. The simulation and experimental results are presented to verify the performance of the FFDISM controller using capacitor current feedback.
4. Realization of FFDISM Controller
High switching frequency necessitates the analog implementation of the controller using low-cost, single-supply opamps.
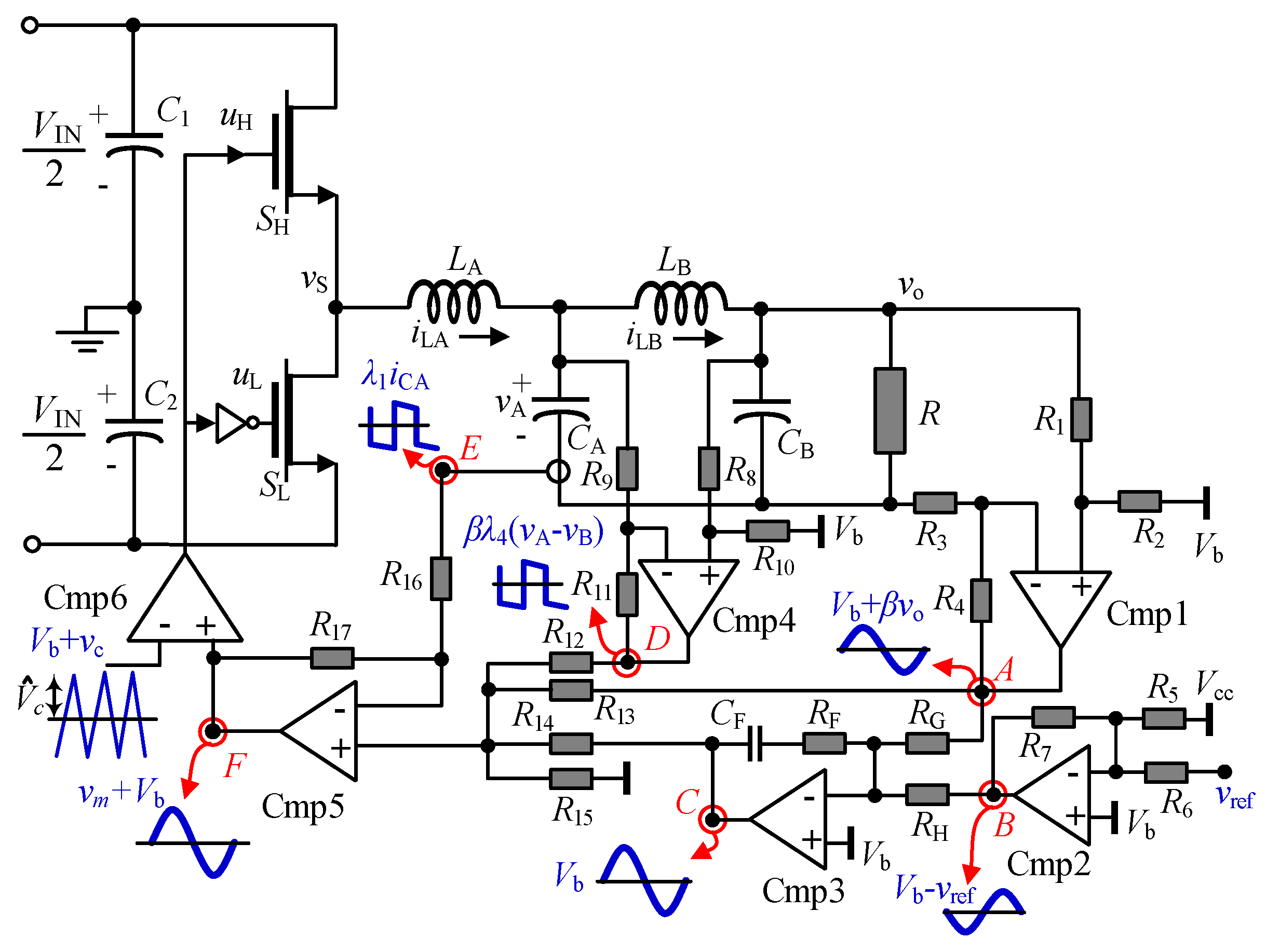
Figure 4 and
Figure 5 show the circuit realization of FFDISM controllers for fourth-order GaN class-D amplifier, with additional
iLA and
iCA feedback respectively. For ease of reference, the controller involving inductor current and capacitor current is pointed as CNRL1 and CNRL2 respectively. Single-supply opamps are used due to its rail-to-rail input and low power consumption as compared to the dual-supply counterparts. The
Vcc and
Vb are opamps dc supply and mid-point bias voltage respectively. Here, both FFDISM designs are evaluated to find the one that offers ease of implementation, determined by the required number of opamps. The additional voltage feedback signals, i.e.,
vA in CNRL1 and
β(
vA −
vB) in CNRL2 unanimously increases the opamp count. However, dc-biasing of
iLA is required, which increases the opamp count in CNRL1 as compared to CNRL2.
Furthermore, the capacitor current iCA in CNRL2 is bidirectional and therefore, can be sensed using a low-cost current transformer as there is no saturation problem. A sense resistor RSC across the secondary of the current transformer converts the current signal into the voltage signal and adequately scales, i.e., λ1 = 0.01RSC. This RSC carries low-current and thus, does not affect the efficiency. On the other hand, the sense resistor for the inductor current iLA feedback in CNRL1 can cause a significant reduction in overall efficiency. It is concluded that CNRL2 offers improvement in efficiency and requires fewer numbers of opamps as compared to CNRL1. Therefore, FFDISM controller using the capacitor current iCA is finally implemented for experimental testing.
In
Figure 5, the voltage at node
A is the scaled and biased output voltage, with the scaling factor determined by the ratio
β =
R2/
R1 = R4/
R3 = 4 kΩ/100 kΩ. Meanwhile, Cmp2 inverts and adds bias
Vb to
vref as the waveform shows at node
B, with the resistors
R5 =
R6 =
R7 = 200 kΩ. The opamp Cmp3 serves as a proportional integral (PI-type) controller, where capacitor
CF and resistors
RF,
RG, and
RH together determine the proportional and integral gains as
λ2 =
RF RG and
λ3 = 1/
CFRG. Since modulating signal is referenced to
Vb = +2.5 V, the carrier signal is also biased to the same dc-level, where its peak, denoted as hat{
Vc} is given by
βVIN/2 = 2 V.
A prototype of the fourth-order GaN class-D amplifier has been built using the GaN cascode transistor, with the top and bottom sides shown in
Figure 6a,b respectively. GaN cascode is realized by combining a low-voltage Si MOSFET with a high-voltage GaN HEMT to exhibit low-conduction and switching power losses. The TPH3006PD (Transphorm Inc., San Jose, CA, USA) available in TO-220 package is used to realize the power circuit. A conventional totem-pole gate driver with a low-valued gate resistance of 3 Ω is used to enable fast switching. The parasitic inductances of the package are high, which is responsible for drain voltage overshoot followed during turn-off transient. Therefore, an resistor-capacitor (RC) snubber across the low-side GaN cascode is used to suppress undesired oscillations. Three 150 µF electrolytic capacitors are connected in parallel to achieve high bus capacitance and reduce the effect of interconnection inductances.
5. Results and Discussion
In this section, the performance of the proposed FFDISM controller is evaluated using simulation and experimental results. First, the frequency response and step response of the closed-loop system based on control diagram reduction are presented. This fundamental technique is useful to investigate the effect of the inner-loop on the compensation of resonance. Furthermore, computer–based circuit simulator i.e., Plexim Plecs is used to analyze the transient behavior of class-D amplifier using different resistive loads. Finally, experimental results are presented for validation of FFDISM controller.
5.1. Simulation Results
Figure 7a shows the multi-loop control diagram of the class-D amplifier, while the equivalent reduced form is shown in
Figure 7b with the open-loop transfer functions
Ho and
Go given in (24) and (25) respectively:
where the parameters of the amplifier are given in
Table 1 (value set i), selected using second-order Butterworth approximation. The feedback gains employed are
λ4 = 0.08 and
β = 0.04.
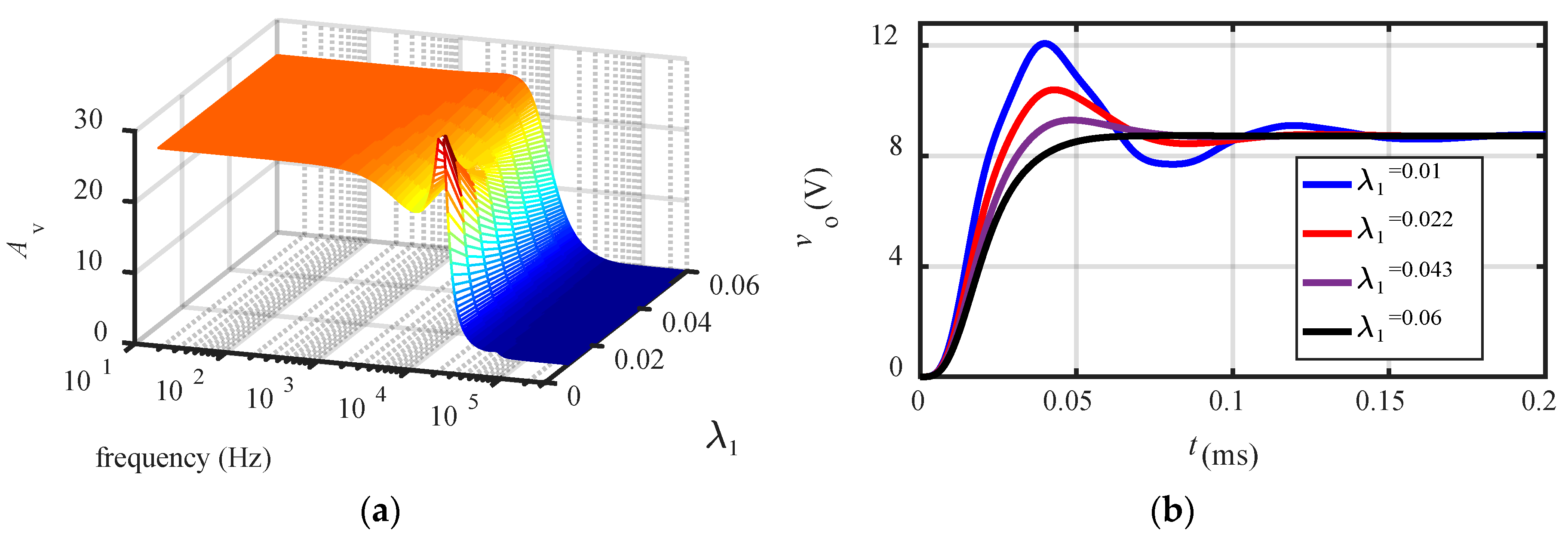
Figure 8a shows the frequency response of the closed-loop class-D amplifier using frequency sweep ranging from 10 Hz to 300 kHz. The frequency response of the FFDISM-controlled amplifier is presented to investigate the significance of the inner-loop for different values of the capacitor current gain
λ1. It is observed that the controller effectively mitigates the resonant peaks and promises a flatter frequency response, almost independent of the load. Further, the proposed control strategy is verified by analyzing the step response in
Figure 8b. The voltage overshoot and oscillations decrease with an increase in the capacitor current gain
λ1.
The transient response of fourth-order GaN class-D amplifier is analyzed using a circuit simulator, which offers a chance to evaluate the correctness of the proposed design. A close match to the experimental results can be obtained by adding the nonidealities to the simulation. Therefore, parasitic resistances of 500 mΩ and 200 mΩ are added to the filter inductors and capacitors, respectively. A sampling time of 1ns is used to capture the simulation results with adequate accuracy at a switching frequency of 100 kHz. Furthermore, a dead-time of 50 ns is introduced before every switching transition. Other factors such as delay in gate driver stage, jitters in PWM, finite rise and fall time of the gate signal are ignored; otherwise, the model takes a long time for solving.
The reference signal is a square wave of 1 kHz frequency, 50% duty cycle and 2 V peak-to-peak amplitude. Such a reference acts as a series of periodic step changes where the slew rate of the rising edge indicates the amplifier’s bandwidth. Simulations are performed using the resistive load of 7 Ω and 14 Ω to observe the change in the voltage overshoot and the settling time with the load.
Figure 9a indicates that the response of the open-loop GaN class-D amplifier is strongly dependent on the load, and the observed voltage overshoot and settling time are 9.34 V and 0.15 ms, respectively, for
R = 7 Ω. By increasing the load resistance to 14 Ω, voltage overshoot and settling time rises to 13.25 V and 0.21 ms respectively. The FFDISM controller using inductor current is also simulated, and results are shown in
Figure 9b. The improvement in response is observed using the controller gains derived in (11). Finally, the simulation results for GaN class-D amplifier with FFDISM using the capacitor current obtained under different loads are presented in
Figure 9c. The proposed FFDISM controller reduces the voltage overshoot and steady-state error to 0.41 V and 0.3 V, respectively, thereby proving its superiority.
5.2. Experimental Results
For experimental validation, a prototype of fourth-order class-D amplifier was implemented on PCB using GaN, available in TO-220 package. Single-supply opamps were used to translate the equivalent control equation in (19) into the analog controller.
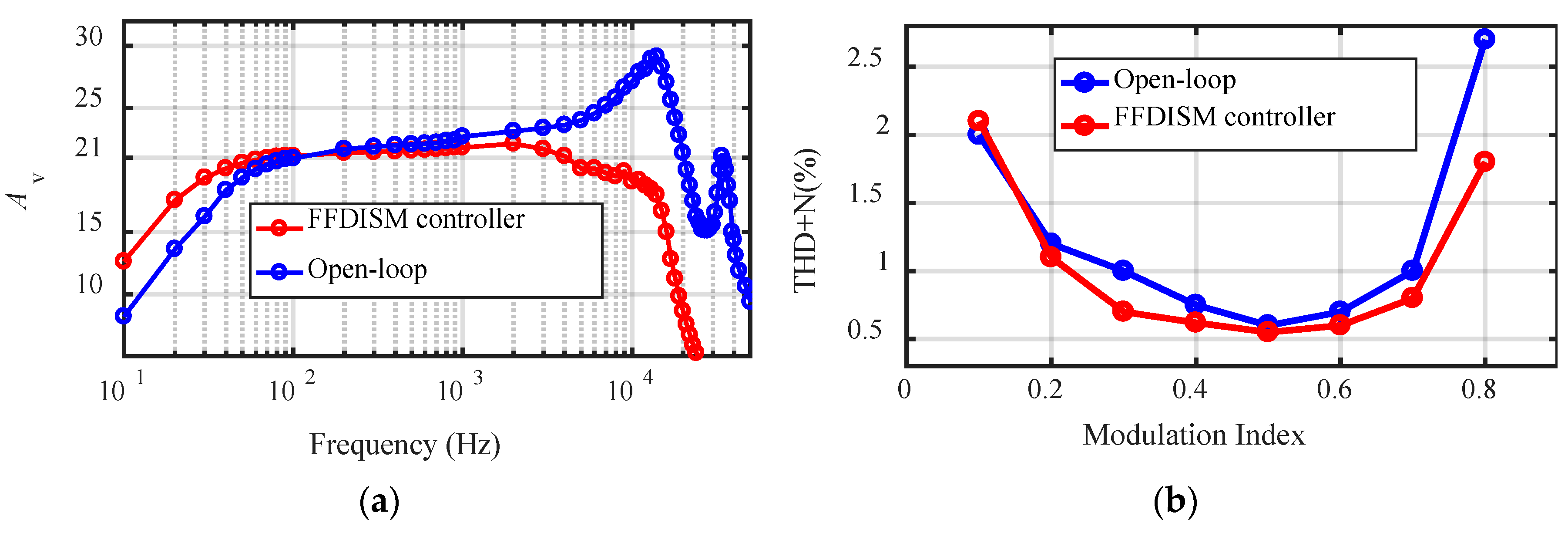
For measurement of the frequency response, sinusoidal reference signals (
vref) of different frequencies ranging from 10 Hz to 50 kHz were applied using a signal generator, and the corresponding outputs were listed. The voltage gain (
Av) was computed for open and closed-loop configurations, as the ratio of the reference
vref to output voltage
vo.
Figure 10a shows the voltage gain plotted against the frequency of the reference signal when there is a 10 Ω resistive load. It is noted in open-loop (shown in blue), that the voltage gain at the 33 kHz resonant frequency is 29.3 which is successfully compensated by FFDISM controller as depicted in red.
Figure 10b shows the THD+N of GaN amplifier against the modulation index, defined as the ratio of the carrier to reference voltage and can range from 0 to 1. The output voltage
vo was recorded using the data-acquisition card at 5 MSa/s sampling frequency, and the fast Fourier transform (FFT) was used to extract THD+N. It was observed that FFDISM controlled fourth-order class-D amplifier achieved improved THD+N as compared to open-loop architecture.
Figure 11a shows the experimental transient response of open-loop GaN class-D amplifier to a reference square wave of 1 kHz frequency. It is found that with a load resistance of 10 Ω, the resonant frequencies result in voltage overshoot of 5.2 V. Similarly, the transient response with FFDISM controller to 1 kHz reference square wave is shown in
Figure 11b, with a recorded overshoot of 1.3 V. Thus it is validated, that the proposed controller improves the transient response of the fourth-order class-D amplifier.
Furthermore, the scalogram analysis was performed, which illustrated a combined time and frequency-domain response of the amplifier. The wavelet transform was applied to represent the output voltage
vo as a weighted sum of the limited duration wavelet functions.
Figure 12a shows the scalogram of the transient response in
Figure 11a. A horizontal line in the figure represents a particular harmonic in the output waveform with its frequency on the y-axis and magnitude given on the color-bar. Since the square wave is a weighted sum of odd harmonics, the parallel lines below 16 kHz can synthesize it with adequate accuracy. Similarly, the line at 100 kHz is due to residual switching noise. There is a noticeable activity in the time interval 2–4 ms and 7–9 ms due to voltage ringing, corresponding to the resonant frequencies at 12.7 kHz and 33 kHz.
Figure 12b shows the scalogram of the transient response in
Figure 11b. The shrunken oval-shaped region and the reduction in magnitude noted on the color-bar verify the effectiveness of the FFDISM controller.
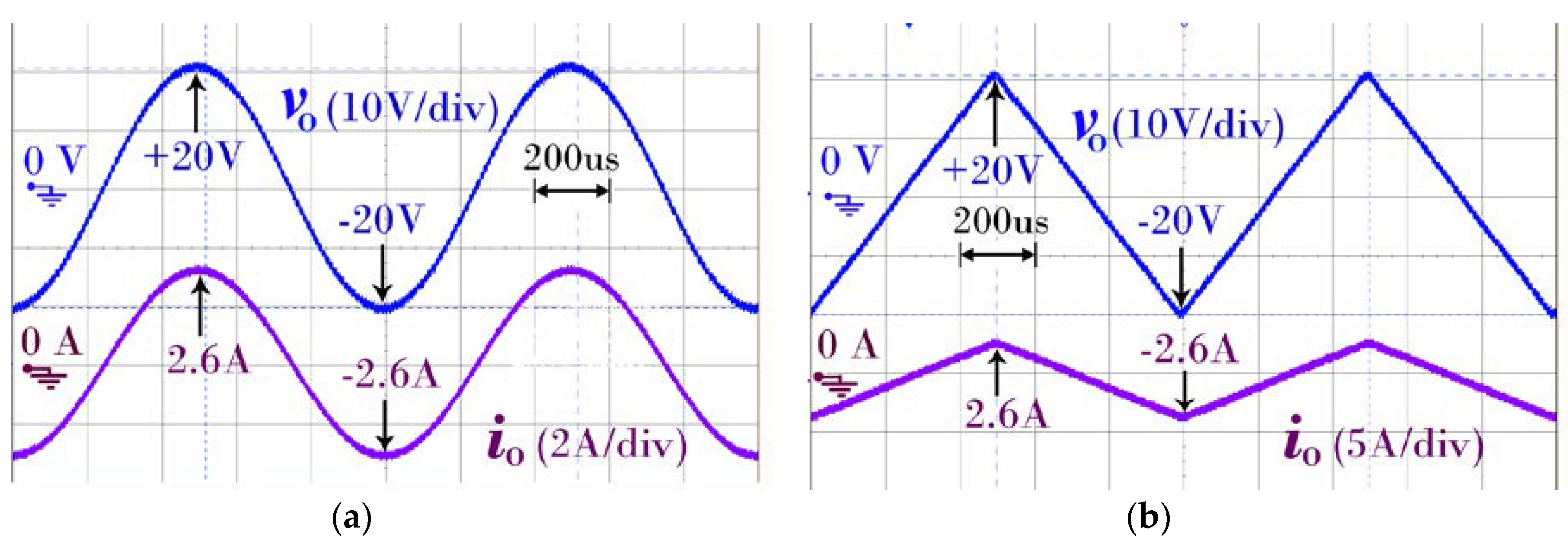
Finally, sinusoidal and triangular signals were generated using the FFDISM controlled GaN class-D amplifier.
Figure 13a shows the 1 kHz sinusoidal output voltage
vo and the corresponding current
io of the fourth-order amplifier. Similarly, for a 1 kHz triangular reference, output voltage
vo and current
io are shown in
Figure 13b. Thus, the effectiveness of the FFDISM controller, proposed for fourth-order class-D amplifier has been validated.
Figure 14 illustrates the efficiency of GaN class-D amplifier at different operating powers. It is observed that at 150 W power, the amplifier achieves 93% efficiency. Moreover, the efficiency and bandwidth of the proposed class-D amplifier are compared in
Table 2, against the hysteretic modulation-based implementation. It indicates that the class-D amplifier with PWM not only gets rid of the variable switching frequency but also improves the efficiency by reducing switching losses.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}