Decoding Performance Analysis of GNSS Messages with Land Mobile Satellite Channel in Urban Environment

Abstract
:1. Introduction
2. System Model
2.1. Transmitter and Receiver
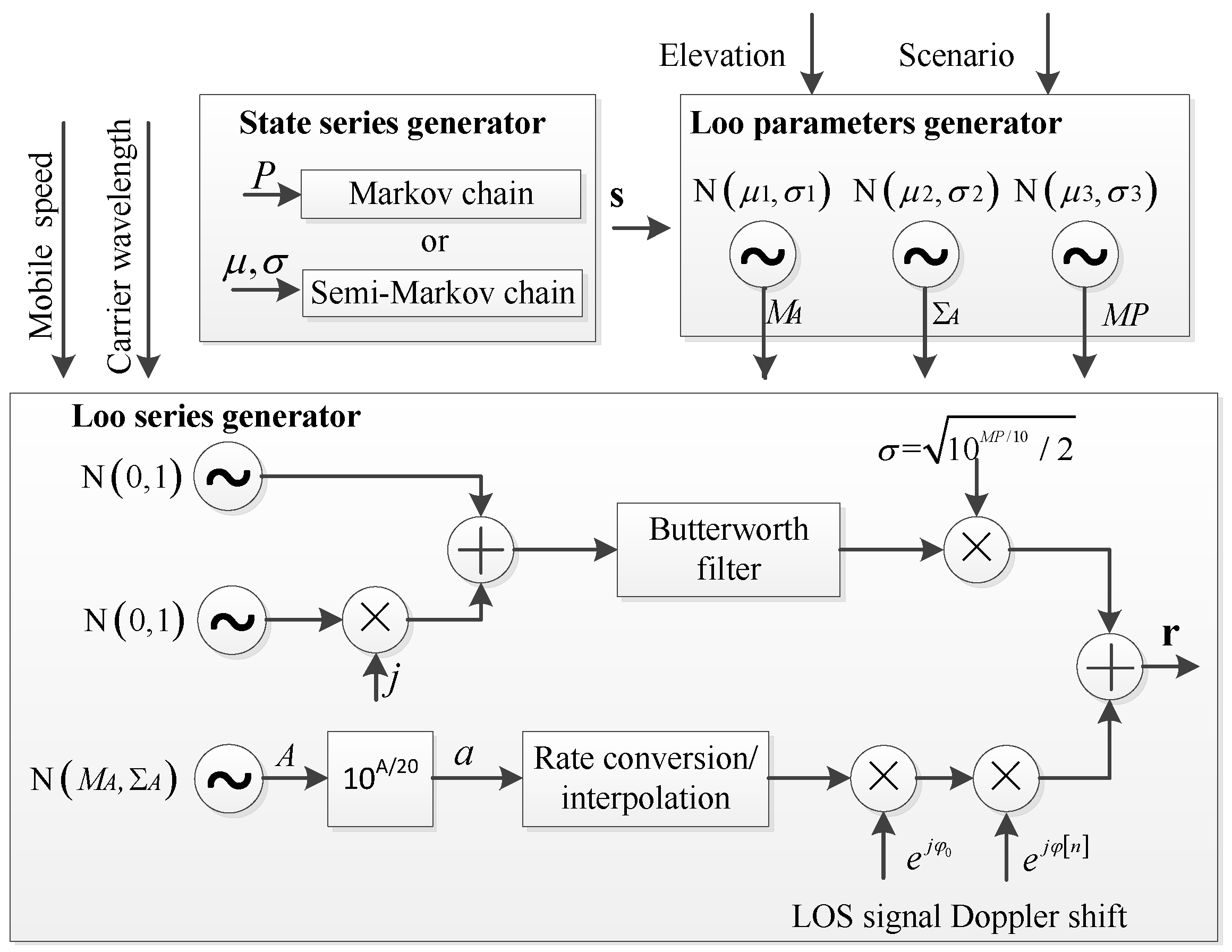
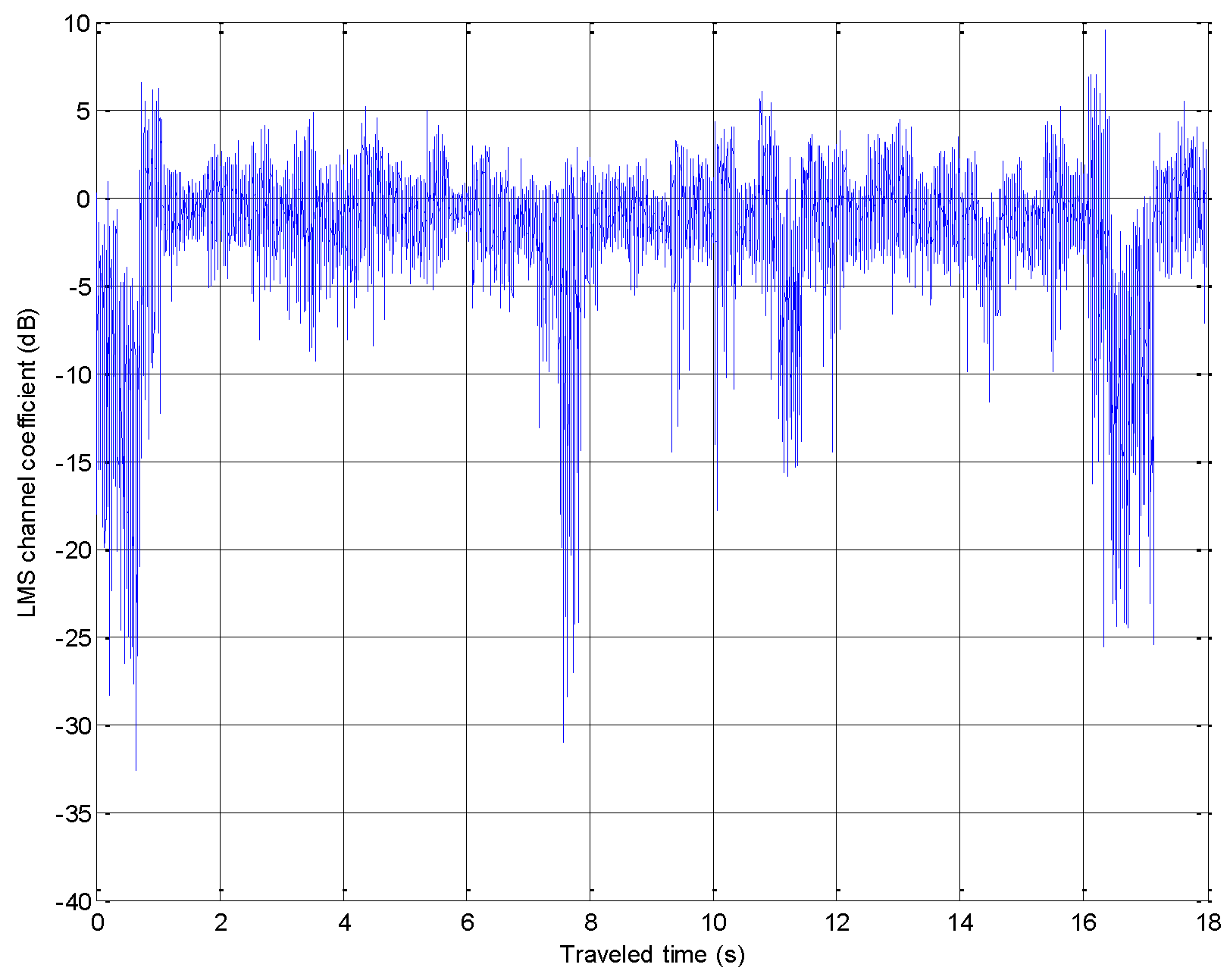
2.2. LMS Channel Model
3. Decoding Performance Analysis in Urban Environment
3.1. Coding and Interleaving
3.2. Terminal Speed
3.3. Elevation Angle
4. Simulation Results and Discussion
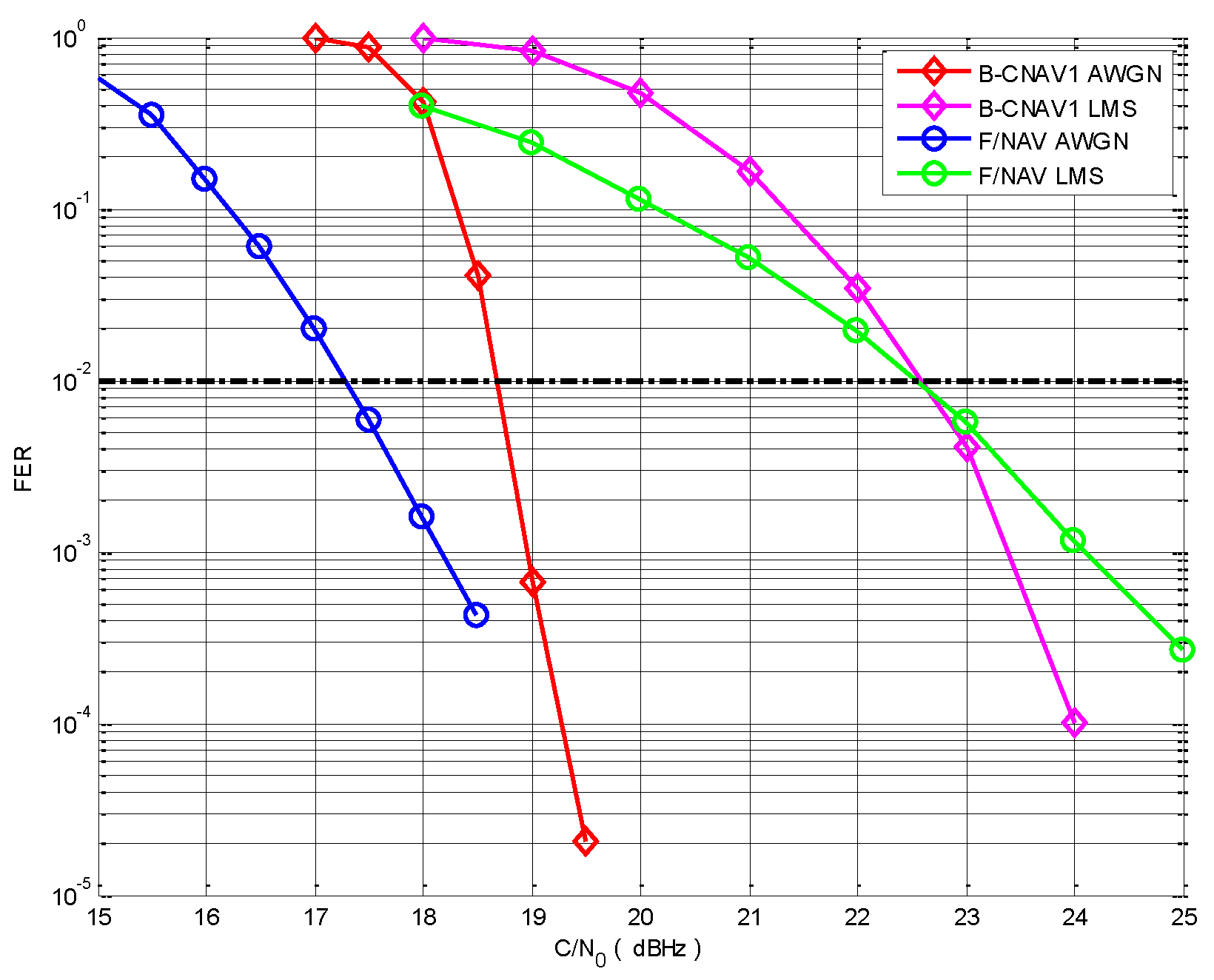
4.1. Effects of Coding and Interleaving
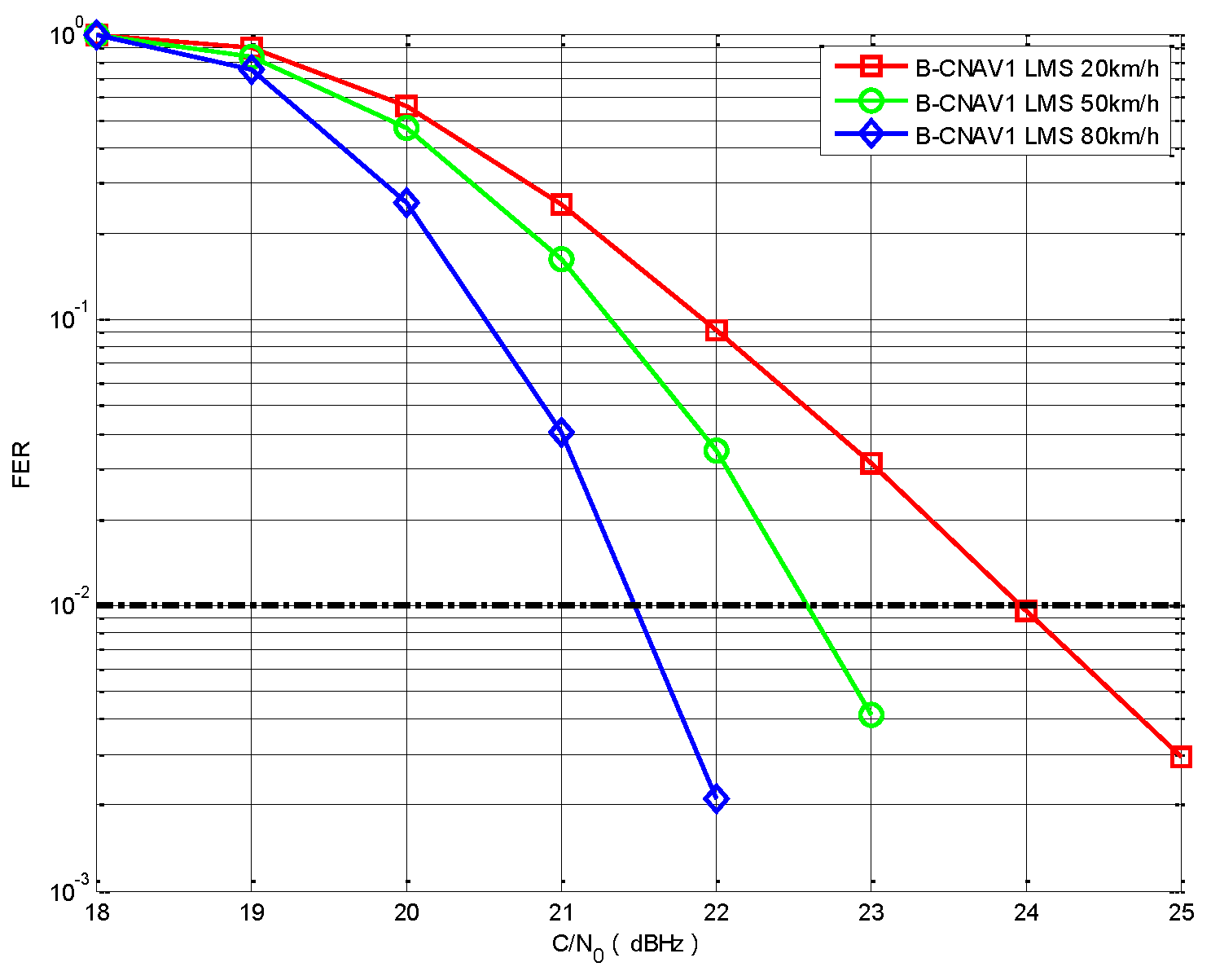
4.2. Effects of Terminal Speed
4.3. Effects of Elevation Angle
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Escher, M.; Stanisak, M.; Bestmann, U. Future Automotive GNSS Positioning in Urban Scenarios. In Proceedings of the 2016 International Technical Meeting of The Institute of Navigation (ITM), Monterey, CA, USA, 25–28 January 2016; pp. 836–845. [Google Scholar]
- Zhu, N.; Marais, J.; Bétaille, D.; Berbineau, M. GNSS Position Integrity in Urban Environments: A Review of Literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef]
- Park, S.G.; Cho, D.J. Smart framework for GNSS-based Navigation in Urban Environments. Int. J. Satell. Commun. Netw. 2017, 35, 123–137. [Google Scholar] [CrossRef]
- Roudier, M.; Grelier, T.; Ries, L.; Garcia-Pena, A.; Julien, O.; Poulliat, C.; Boucheret, M.L.; Kubrak, D. Optimizing GNSS Navigation Data Message Decoding in Urban Environment. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 5–8 May 2014; pp. 581–588. [Google Scholar]
- Zheng, L.; You, Z.; Zhang, G.; Zhang, G.; Zhao, S. Acquisition of Weak GNSS Signals Based on Non-coherent Integration. J. Tsinghua Univ. 2014, 54, 794–798. [Google Scholar]
- Andreotti, R.; Emmanuele, A.; Fontanella, D.; Zanier, F.; Luise, M. Code-Shift-Keying (CSK) with Advanced FEC Coding for GNSS Applications in Satellite Multipath Channel. In Proceedings of the 7th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 3–5 December 2014. [Google Scholar]
- Rieche, M.; Ihlow, A.; Arndt, D.; Pérez-Fontán, F.; Galdo, G.D. Modeling of the Land Mobile Satellite Channel considering the Terminal’s Driving Direction. Int. J. Antennas Propag. 2015, 2015, 372124. [Google Scholar] [CrossRef]
- Xi, L.; Yang, W.; Zhao, D.F. Improved Two-State LMS Channel Model for DVB-SH System. J. Univ. Electron. Sci. Technol. China 2016, 45, 179–184. [Google Scholar]
- Anghileri, M.; Paonni, M.; Fontanella, D.; Eissfeller, B. Assessing GNSS Data Message Performance: A New Approach; Inside GNSS: Eugene, Oregon, USA, 2013; pp. 60–70. [Google Scholar]
- Roudier, M.; Garcia-Pena, A.; Julien, O.; Grelier, T.; Ries, L.; Poulliat, C.; Boucheret, M.-L.; Kubrak, D. Demodulation Performance Assessment of New GNSS Signals in Urban Environments. In Proceedings of the 27th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS+), Tampa, FL, USA, 8–12 September 2014; pp. 3411–3429. [Google Scholar]
- Salgueiro, F.; Luise, M.; Zanier, F.; Crosta, P. Pilot-aided GNSS Data Demodulation Performance in Realistic Channels and Urban Live Tests. In Proceedings of the 8th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 14–16 December 2016; pp. 1–8. [Google Scholar]
- BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signals B1C (Versison 1.0); China Satellite Navigation Office: Beijing, China, 2017.
- European GNSS (Galileo) Open Service Signal in Space Interface Control Document, Issue 1.2; European Union and European Space Agency: Paris, France, 2015.
- Prieto-Cerdeira, R.; Perez-Fontan, F.; Burzigotti, P.; Bolea-Alamañac, A.; Sanchez-Lago, I. Versatile Two-state Land Mobile Satellite Channel Model with First Application to DVB-SH Analysis. Int. J. Satell. Commun. Netw. 2010, 28, 291–315. [Google Scholar] [CrossRef]
- Fontan, F.P.; Vazquez-Castro, M.; Cabado, C.E.; Garcia, J.P.; Kubista, E. Statistical Modeling of the LMS Channel. IEEE Trans. Veh. Technol. 2001, 50, 1549–1567. [Google Scholar] [CrossRef]
- Hori, Y.; Ochiai, H. An Interleaver Optimization for BICM-OFDM with Convolutional Codes over Frequency-Selective Block Fading Channels. In Proceedings of the 2014 IEEE Wireless Communications and Networking Conference (WCNC), Istanbul, Turkey, 6–9 April 2014; pp. 769–774. [Google Scholar]
- Declercq, D.; Fossorier, M. Decoding Algorithms for Nonbinary LDPC Codes Over GF(q). IEEE Trans. Commun. 2007, 55, 633–643. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | B-CNAV1 | F/NAV |
|---|---|---|
| Coding Scheme | 64-ary (200,100) LDPC code | (2,1,7) Convolutional code |
| Frame Length (symbol) | 1200 (Subframe 2) | 500 (Page) |
| Code Rate | 1/2 | 1/2 |
| Symbol Rate (symbol/s) | 100 | 50 |
| Interleaving Scheme | Block interleaver (46 columns × 38 rows) | Block interleaver (61 columns × 8 rows) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, J.; Lu, X.; Wang, X.; Chen, X.; Tang, S. Decoding Performance Analysis of GNSS Messages with Land Mobile Satellite Channel in Urban Environment. Electronics 2018, 7, 273. https://doi.org/10.3390/electronics7110273
Ke J, Lu X, Wang X, Chen X, Tang S. Decoding Performance Analysis of GNSS Messages with Land Mobile Satellite Channel in Urban Environment. Electronics. 2018; 7(11):273. https://doi.org/10.3390/electronics7110273
Chicago/Turabian StyleKe, Jing, Xiaochun Lu, Xue Wang, Xiaofei Chen, and Sheng Tang. 2018. "Decoding Performance Analysis of GNSS Messages with Land Mobile Satellite Channel in Urban Environment" Electronics 7, no. 11: 273. https://doi.org/10.3390/electronics7110273